多傳感器融合的船舶輪機設備多發故障信號監測研究
2022-10-19 10:43:14趙云博
艦船科學技術 2022年17期
趙云博
(江蘇海事職業技術學院,江蘇 南京 211170)
0 引 言
船舶系統中輪機設備至關重要,直接影響船舶航行安全。及時檢修船舶輪機設備,可避免重大安全事故發生,而影響船舶檢修效率與精度的因素是多發故障信號監測結果。多發故障代表同一設備出現同一故障的次數較多,及時發現多發故障,可有效防止嚴重故障問題。為此,需研究故障信號監測方法。李汶駿等利用混合核的核主元分析方法,完成輪機故障監測,該方法可有效在線監測輪機故障,具備較優的實用性。王崇宇等利用深度卷積神經網絡,實現輪機故障監測。該方法可有效監測輪機故障,監測精度高于95.47%,具備較優的魯棒性。上述2 種方法完成故障監測均依賴歷史數據,具備一定的局部性與不確定性,易出現故障監測結果錯誤情況。多傳感器融合是充分融合多個傳感器資源,彌補單個傳感器采集信息存在的冗余與缺失問題,解決信息采集的局部性與不確定性問題,為故障信號監測提供更為精準的數據支持。為此研究多傳感器融合的船舶輪機設備多發故障信號監測方法,實現多發故障信號監測。
1 船舶輪機設備多發故障信號監測
1.1 船舶輪機設備多發故障信號特征提取
利用多個傳感器采集船舶輪機設備運行信號,令單個傳感器采集的船舶輪機設備運行信號為(),其中,采樣時間為;分解()獲取+1個本征模態函數x(),即經驗小波變換分量,()的計算公式如下:
其中:為信號本征模態函數編號。
將()劃分為個不間斷的區間,各小波濾波器間的邊界是 ω,第個分割區間Λ為:
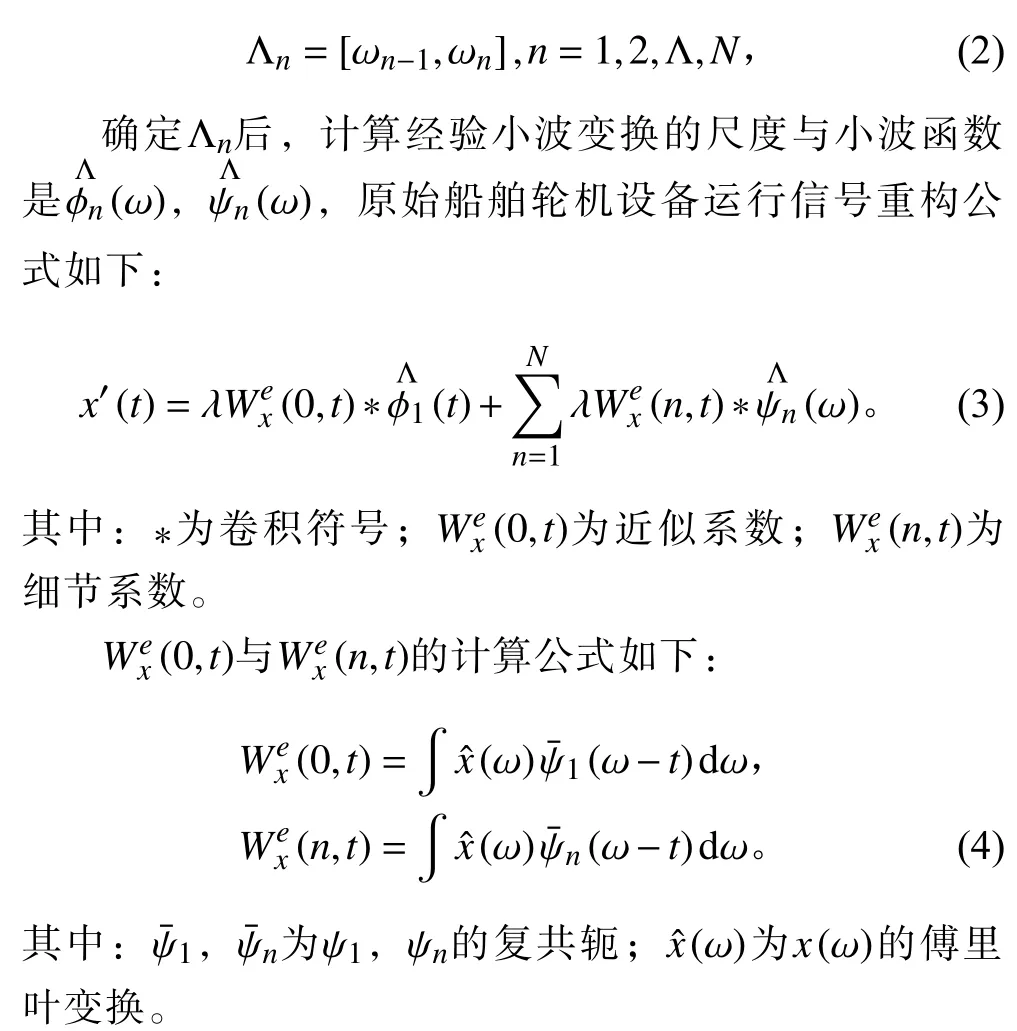
利用經驗小波變換提取船舶輪機設備多發故障信號特征,具體步驟如下:
1) 利用尺度空間法劃分()的頻譜,并分解(),獲取x(),=1,2,3,…,+1;
2) 以方差為指標,再次分解首個(),以()與鄰近2 個經驗小波變換分量方差未超過0.01 為,此時獲取()內的趨勢信號();
3)在()內剔除(),獲取新的船舶輪機設備運行信號,并分解該信號。求解各x()與()相關系數r,公式如下:
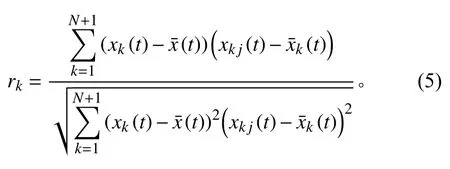

在r內選擇最大值,同時獲取r內全部超過0.85A 的極大值數量,數量最多相應的原始本征模態函數,利用重構該本征模態函數,完成船舶輪機設備多發故障信號特征提取。
1.2 單個傳感器的船舶輪機設備多發故障信號監測
歸一化處理單個傳感器的船舶輪機設備多發故障信號特征,并輸入徑向基函數(radial basis function,RBF)神經網絡內,輸出單個傳感的船舶輪機設備多發故障信號監測結果。RBF 網絡輸入與輸出向量間的映射關系為:

RBF 的第個隱藏神經元的高斯函數θ,θ的中心與寬度是 ?,σ。第個輸出節點的輸出為:
其中:為隱藏神經元數量;η為可調節因子;w為權值。
通過式(7)可獲取單個傳感器的船舶輪機設備多發故障信號監測結果。
1.3 基于多傳感器融合的多發故障信號檢測
以單個傳感器的船舶輪機設備多發故障信號監測結果為基本概率分配函數,利用基于證據理論的多傳感器融合方法,融合單個傳感器的船舶輪機設備多發故障信號監測結果,獲取最終的船舶輪機設備多發故障信號監測結果。多發故障信號監測原理為:以輸出的單個傳感器多發故障信號監測結果為基本概率分配函數,通過組合規則展開運算,按照融合結果完成多發故障信號監測。多傳感器融合的船舶輪機設備多發故障信號監測框架是 Θ;Θ內包含多發故障信號監測的基本命題;令隨機命題屬于冪集 2,則在 2內存在:

其中:?為空集;()∈[0,1],?Θ,為基本概率分配函數;y(A)的為概率賦值,代表船舶輪機設備多發故障信號監測證據支持的發生程度。若是 Θ的子集,同時()>0,那么是船舶輪機設備多發故障信號監測證據的焦元,全部焦元集合是核。證據是通過船舶輪機設備多發故障信號監測證據體(,())構建而成,通過(,()) 設置 2內的信任函數:2→[0,1] 與似真度函數:2→[0,1],公式如下:

式中:()代表對于的支持程度,()代表不否定的程度。
多傳感器的船舶輪機設備多發故障信號監測結果的組合規則為:,為 Θ中的信任函數;與之相應的基本概率分配函數為y,y;船舶輪機設備多發故障信號監測證據的焦元為,,···A,,,···C;證據間的信任沖突度為:

其中:A′,C′為 第個與第個焦元。
因此,組合后新的基本概率分配函數=⊕如下:
其中,為組合后多傳感器融合的船舶輪機設備多發故障信號監測證據的焦元。在≠1情況下,()僅存在一個確定的概率賦值;在=1情況下,說明與完全矛盾,不可組合。
以融合后的為船舶輪機設備多發故障信號監測的判斷依據,以設置閾值的方式,完成多發故障類型信號監測。
2 實驗結果與分析
以某船舶輪機設備為實驗對象,該輪機主要包含主調節閥與高、低壓汽輪機等設備,結構如圖1 所示。利用本文方法監測輪機設備多發故障信號,在輪機的前后兩端各安裝1 個振動傳感器,用于采集船舶輪機設備運行信號,設置輪機設備共存在2 種類型的多發故障,分別是不對中與共生松動。
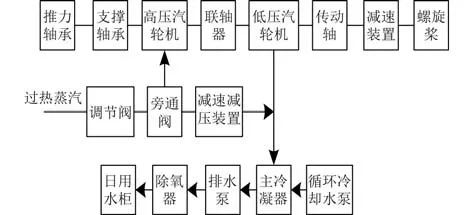
圖1 船舶輪機結構圖Fig.1 Structural diagram of ship turbine
利用2 個傳感器采集該船舶輪機設備運行信號,以船舶輪機設備存在不對中故障時為例,2 個傳感器的采集結果如圖2 所示。根據圖2 可知,本文方法可有效采集船舶輪機設備運行信號,2 個傳感器采集的結果雖存在微小差距,但變化趨勢大致相同。

圖2 船舶輪機設備運行信號采集結果Fig.2 Acquisition results of operational signals of marine turbine equipment
利用本文方法在船舶輪機設備運行信號中,提取船舶輪機設備多發故障信號特征,以傳感器2 采集的信號為例,多發故障信號特征提取結果如圖3 所示。根據圖3 可知,本文方法可有效分解船舶輪機設備運行信號,清晰呈現設備運行信號的波形圖,提取不同頻率區間的多發故障信號特征,為后續多發故障信號監測提供數據支持。
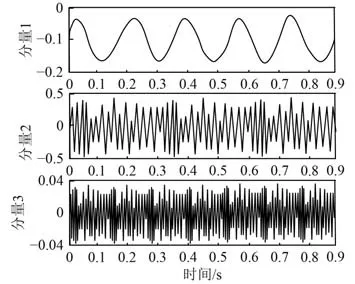
圖3 多發故障信號特征提取結果Fig.3 Feature extraction results of multiple fault signals
利用本文方法監測該船舶多發故障信號,監測結果如圖4 所示。根據圖4 可知,本文方法可有效監測船舶輪機設備多發故障信號,共監測到2 種類型的多發故障信號,分別是不對中與共生松動多發故障,與實際多發故障類型相同,說明本文方法多發故障信號監測精度較高,可精準監測船舶輪機設備多發故障信號。
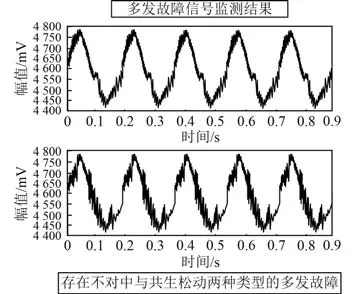
圖4 船舶輪機設備多發故障信號監測結果Fig.4 Monitoring results of multiple fault signals of marine turbine equipment
3 結 語
船舶故障檢修屬于確保船舶安全航行的關鍵,船舶檢修時,需要依據多發故障信號監測結果,實現快速、精準維修。為此研究多傳感器融合的船舶輪機設備多發故障信號監測方法,精準監測多發故障信號,確保維修人員可盡早發現船舶輪機設備存在的各種故障問題,保證船舶航行安全。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(2021年19期)2022-01-12 06:16:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50