基于PLC 的船舶導航系統(tǒng)高精度控制研究
2022-10-19 10:43:18苗百春于吉鯤
艦船科學技術 2022年17期
苗百春,于吉鯤
(大連海洋大學 應用技術學院,遼寧 大連 116300)
0 引 言
艦船導航系統(tǒng)為艦船提供航行方向、位置、速度、水平以及方位等基準數(shù)據(jù),實現(xiàn)艦船目的地確定、路徑計算和引導等,對艦船的航行進行監(jiān)控和引導,以此保證艦船的航行安全。艦船在長時間的航行狀態(tài)下,受到海面多種環(huán)境的影響以及不同磁場的干擾,會導致導航顯示方向和其實際航行方向之間發(fā)生明顯的偏差角,影響導航精度,偏離目的地。因此,如何提升艦船導航系統(tǒng)的控制精度,成為艦船管理中的重要內(nèi)容。PLC 控制器具有可編輯功能其主要是依據(jù)其內(nèi)部含有的微處理器為核心,執(zhí)行邏輯運算、順序控制等操作,實現(xiàn)設備的自動化控制。
為保證艦船的安全運行,陳志超等對此分析后,基于改進LOS 導航算法提出相關控制方法。祝亢等則研究艦船的航行特點后,提出基于深度強化學習的相關控制方法。上述方法均可有效控制艦船航跡,但是在應用過程中,仍舊存在一定超調量,因此,本文提出基于PLC 的艦船導航系統(tǒng)高精度控制方法。該方法利用PLC 的優(yōu)勢和功能,對艦船導航系統(tǒng)進行高精度控制。
1 艦船導航系統(tǒng)高精度控制
1.1 基于PLC 導航系統(tǒng)高精度控制方法框架
艦船在航行過程中,導航系統(tǒng)的導航精準性對于航行安全具有重要意義,因此,本文提出基于PLC的艦船導航系統(tǒng)高精度控制方法,其整體框架用圖1描述。該方法以嵌入式PLC 系統(tǒng)結構為主,其整體劃分為2 個部分,分別是控制層和應用層,控制層是由多種硬件設備組成,包含下位機、航行控制器、PLC控制器;應用層則是對控制層中的硬件進行初始化操作,同時向控制層下達控制指令以及呈現(xiàn)控制結果。
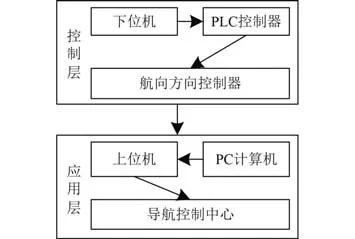
圖1 基于PLC 導航系統(tǒng)高精度控制方法框架Fig.1 High precision control method framework of PLC based navigation system
1.2 基于PLC 的艦船導航控制實現(xiàn)
1.2.1 基于PLC 的艦船導航控制原理
控制層中主要是采用PLC 控制器為核心,對艦船導航系統(tǒng)進行控制,主要控制原理用圖2 描述。該控制器的芯片為SEMENS S7-200,設有3 個擴展模塊分別是EM223,EM232,EM2345。此外,為提升對艦船導航的控制精度,在其芯片設置粒子群優(yōu)化的PID 控制方法,對導航系統(tǒng)的相關控制參數(shù)實行控制,實現(xiàn)艦船導航系統(tǒng)的高精度控制。
依據(jù)圖2 可知:通過PLC 控制器對導航系統(tǒng)進行控制后,可對艦船的舵輪、航向、舵角進行全面調整和控制,及時掌握艦船航行的整體情況。當導航顯示方向和艦船實際航行方向之間發(fā)生偏差角時,控制器可向應用層發(fā)送偏航預警,應用層可通過上位機下達調整指令,進行偏差調整,保證導航精準度。
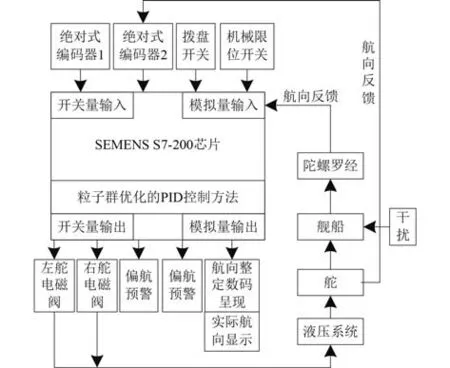
圖2 基于PLC 的艦船導航控制原理Fig.2 Principle structure of ship navigation control based on PLC
1.2.2 基于粒子群優(yōu)化的PID 導航系統(tǒng)控制方法
PLC 控制器在對導航進行控制過程中,為提升控制的穩(wěn)定性,引入基于粒子群優(yōu)化的PID 控制方法對控制器的參數(shù)進行優(yōu)化控制。該優(yōu)化方法主要對微分環(huán)節(jié)實行優(yōu)化,掌握導航系統(tǒng)偏差信號的變化規(guī)律,以此保證控制的穩(wěn)定性。本文控制方法,是以PID 控制器為基礎,在此基礎上通過粒子群算法對控制器的加權因子 α 和 β實行優(yōu)化,實現(xiàn)PID 控制方法的自適應調節(jié),以此保證控制效果。基于粒子群優(yōu)化的PID 控制方法結構用圖3 描述。
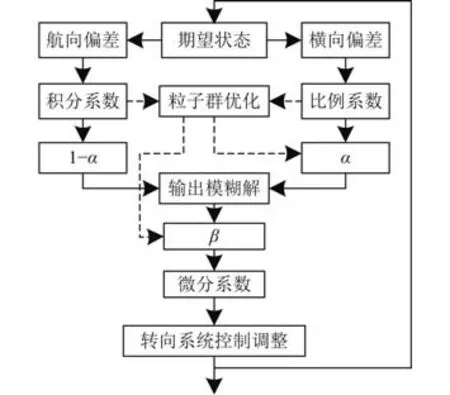
圖3 基于粒子群優(yōu)化的PID 控制結構Fig.3 PID control structure based on particle swarm optimization
圖中,ε和φ表示經(jīng)過量處理后,艦船導航在橫向和航向2 種偏差結果。該算法主要是對PID 控制方法的積分環(huán)節(jié)進行優(yōu)化,其計算公式為:
式中:k,k和k分別為比例、積分和微分系數(shù);在時刻下,艦船導航系統(tǒng)的偏差用表示,且該偏差包含橫向 ε和航向 φ 兩部分偏差結果,即=ε+φ ;表示優(yōu)化控制后的輸出精度值。
該方法在控制過程中,其控制指標函數(shù)采用橫向ε和航向 φ兩部分偏差總和進行描述,計算公式為:

1.3 基于免疫算法的PID 參數(shù)優(yōu)化

式中:表示絕對誤差積分。
粒子概率H的選擇是通過A完成,其計算公式為:
式中:A表示經(jīng)過迭代獲取的親和度;表示種群數(shù)量。
粒子濃度C的計算公式為:
依據(jù)C選擇粒子的概率計算公式為:
基于此粒子被選擇的總體概率計算公式為:

式中:=1,2,...,;η=[0,1]表示權重系數(shù)。
獲取公式(8)的計算結果,并按照降序進行排列,獲取計算結果中的缺失粒子以及結果較小粒子,將兩者采用上一代記憶微粒進行替代。
通過循環(huán)迭代對粒子的適應度值進行重新計算,獲取最優(yōu)粒子對替換進來的記憶微粒進行更新,以此實現(xiàn)X的優(yōu)化。
該優(yōu)化步驟如下:
通過初始化對免疫微粒種群實行處理,并設定初始化參數(shù)。
計算各個粒子的適應度,獲取其中最優(yōu)粒子。


依據(jù)最新迭代獲取粒子適應度更新記憶粒子信息庫。
當滿足設定的最大迭代次數(shù)時,進入步驟6;反之則回轉至步驟3 進行重新迭代。
獲取的最優(yōu)微粒位置的粒子結果即為優(yōu)化后X的結果,以此完成控制優(yōu)化。
2 測試結果與分析
為驗證本文方法在艦船導航系統(tǒng)高精度控制中的應用效果,將本文方法用于某艦船導航系統(tǒng)控制中,該艦船主要用于遠程進出口運輸,且為滿載狀態(tài),其詳細情況用表1 描述。
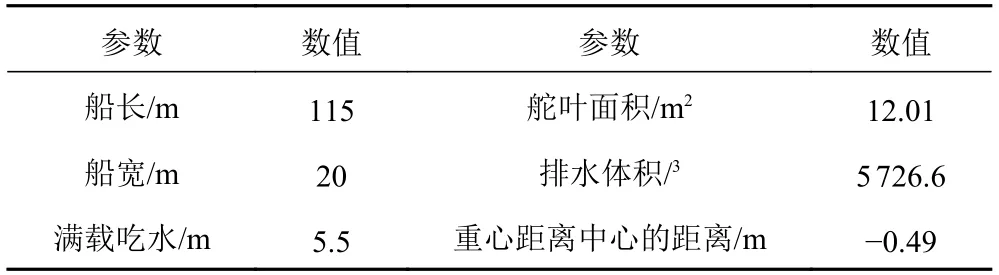
表1 船舶詳細參數(shù)Tab.1 Detailed parameters of ship
為驗證本文方法對艦船導航系統(tǒng)的控制性能,采用絕對誤差積分 γ作為評價指標,計算公式為:

式中:表示最大迭代次數(shù)。
依據(jù)該公式計算艦船在不同速度下,指標的計算結果,如圖4 所示。由圖4 可知:艦船在不同的航行速度下,隨著航行時間的逐漸增加,本文方法對艦船導航系統(tǒng)控制后 γ的指標結果均在0.25 以下,滿足應用標準。其中最大結果為0.22 左右,最小值為0.07 左右。因此,本文方法具有良好的艦船導航控制性能。
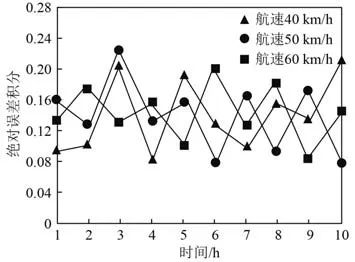
圖4 絕對誤差積分指標計算結果Fig.4 Calculation results of absolute integration error integration index
為測試本文方法對艦船導航系統(tǒng)的高精度控制效果,采用橫向和航向2 個偏差作為衡量指標,獲取本文方法在不同的航行距離下,2 個偏差的結果,如表2所示。2 個偏差的應用標準分別在(-2~2) cm 和(-3.5°~3°)之間。由表2 可知,應用本文方法后,有效完成艦船導航系統(tǒng)的高精度控制,使其橫向和航向2 個偏差結果均在應用標準范圍內(nèi),其中橫向最大誤差為1.55 cm,航向最大誤差為-2.2°。本文在進行導航系統(tǒng)控制過程中,將橫向和航向2 個偏差值作為粒子群優(yōu)化的PID的導航系統(tǒng)控制方法對導航系統(tǒng)的控制指標函數(shù),實現(xiàn)導航控制,因此可保證高精度的控制效果。
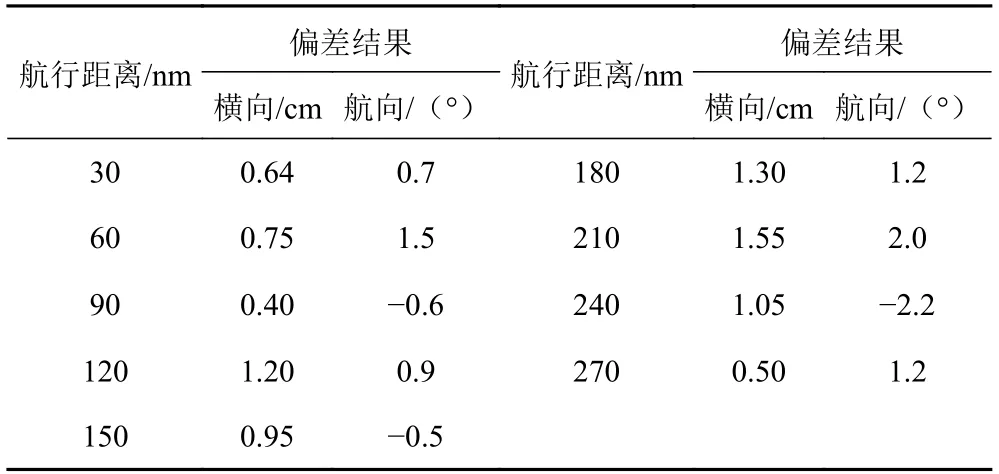
表2 橫向和航向2 個偏差指標測試結果Tab.2 Test results of lateral and heading deviation indexes
為進一步驗證本文方法對艦船導航的高精度控制效果,在不同的艦船期望航向下,采用本文方法在有風干擾和無風干擾情況下,進行導航控制,獲取控制過程中的超調量結果(應用要求超調量低于0.1%),如圖5 所示。可知,采用本文方法對艦船導航系統(tǒng)進行高精度控制后,艦船期望航向角的不斷變化,導航系統(tǒng)控制的超調量均在0.1% 以內(nèi),其最大超調量為0.05%,最小超調量為0%。因此本文方法具有較好的艦船導航高精度控制能力,可保證艦船的導航精準程度。
圖5 控制過程中的超調量結果Fig.5 Overshoot results during control
3 結 語
艦船在航行過程中會受到海洋環(huán)境等干擾,導致航行精準度受到直接影響。本文研究基于PLC 的艦船導航系統(tǒng)高精度控制方法,并對該方法的應用情況進行測試。結果顯示,本文方法具有良好的控制性能,有效控制橫向和航向2 個偏差結果,導航高精度控制能力良好,可保證艦船的導航精準程度。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56