一種JTIDS 信號批號的離線合批方法
2022-10-24 13:38:30潘定平朱宇鋒
航天電子對抗
2022年4期
潘定平,朱宇鋒
(中國電子科技集團公司第三十六研究所,浙江 嘉興 314033)
0 引言
聯合戰術信息分發系統(JTIDS)是美國為適應三軍聯合作戰而研制的綜合通信、導航、識別系統,是美軍自動化戰術C3I 系統的重要組成部分,具有用戶多、容量大、生存能力強、使用靈活、功能齊全的特點,已成為美軍及其盟友空對空、空對艦、空對地數據通信的主要方式。美國及北約所廣泛使用的戰術數據鏈Link16 就采用了JTIDS 作為它的主要結構形式,被美國國防部確定為三軍聯合作戰用數據鏈。
在戰術任務角度,JTIDS 網內成員主要分為任務執行成員、任務指揮成員和空中接力成員,其中任務執行成員具備數量多,但發射信息少且每個成員占用時隙數少的特點,這種特點往往會造成JTIDS 目標批號在方位和時間上的不連續,且JTIDS 端機覆蓋海陸空各種平臺,其運動軌跡復雜多樣,進一步加大了獲得穩定連續的信號批號的難度,從而造成增批現象,為此,本文提出一種離線合批方法,可在一定程度上糾正上述增批問題。
1 JTIDS 信號概述
JTIDS 信號在時域和頻域上均具有固定且鮮明的特征。
在時域上,JTIDS 數據鏈系統采用時分多址(TDMA)的工作方式,其時間網絡具有周期性,時間軸依次劃分為12.8 min 的時元,時元又劃分為64 個時幀,每個時幀又劃分為1 536 個時隙,每個時隙發射一組脈沖信號,如圖1 所示。
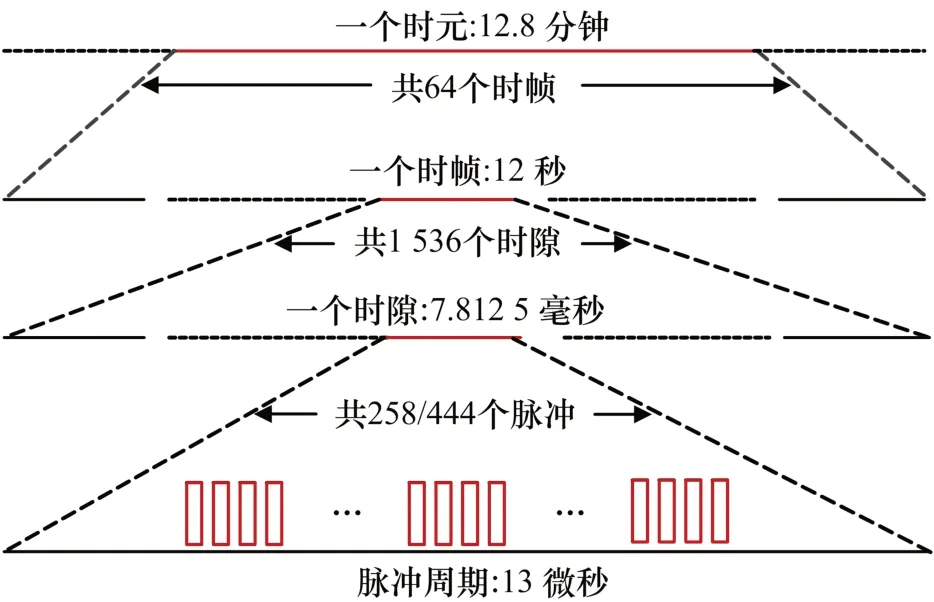
圖1 時域特征
頻域上,JTIDS 采用跳頻技術,載頻從969~1 008 MHz(13 個 跳 頻 點)、1 053~1 065 MHz(5 個 跳頻點)和1 113~1 206 MHz(33 個跳頻點)3 個子頻段均勻選取跳頻點,脈沖跳頻間隔30 MHz 以上,如圖2所示。……
登錄APP查看全文