基于速度估計(jì)的目標(biāo)能量累積算法在空間探測(cè)中的應(yīng)用
2022-10-24 13:38:40梁書立
航天電子對(duì)抗 2022年4期
田 蕾,梁書立,陳 恒
(北京跟蹤與通信技術(shù)研究所,北京 100094)
0 引言
空間平臺(tái)因其覆蓋范圍廣、情報(bào)收集與戰(zhàn)術(shù)戰(zhàn)略支援能力強(qiáng)等優(yōu)勢(shì),已逐漸成為現(xiàn)代化戰(zhàn)場(chǎng)的制高點(diǎn)。光電成像探測(cè)系統(tǒng)在空間作戰(zhàn)域中承擔(dān)了預(yù)警探測(cè)、目標(biāo)監(jiān)視、威脅感知等眾多任務(wù),是現(xiàn)代戰(zhàn)爭(zhēng)不可缺少的一部分。但空間平臺(tái)在軌運(yùn)行階段,會(huì)頻繁面臨太陽小角度入射的逆光場(chǎng)景,造成光電成像探測(cè)系統(tǒng)失效;同時(shí),空間碎片及飛行器借此異常接近,會(huì)對(duì)平臺(tái)造成巨大的生存威脅。因此逆光場(chǎng)景下弱小目標(biāo)的檢測(cè),是當(dāng)前亟待解決的一項(xiàng)關(guān)鍵技術(shù)。
本文通過分析空間弱小目標(biāo)檢測(cè)面臨的主要問題,提出一種有效的逆光探測(cè)與弱小目標(biāo)檢測(cè)方法,在強(qiáng)光背景下大幅提高目標(biāo)信噪比,為空間成像探測(cè)能力提供有效技術(shù)支撐。
1 空間弱小目標(biāo)檢測(cè)面臨的主要問題
在空間環(huán)境中,目標(biāo)尺度小、成像距離遠(yuǎn),所成圖像多為點(diǎn)目標(biāo),無輪廓、紋理和形狀等信息特征;同時(shí),受限于空間陽照角度變換限制,系統(tǒng)成像會(huì)面臨太陽光照干擾,長(zhǎng)時(shí)間處于飽和或低信噪比狀態(tài),使目標(biāo)被淹沒在強(qiáng)光背景中而無法成像,降低目標(biāo)發(fā)現(xiàn)與檢測(cè)概率,影響任務(wù)載荷的正常使用效能。如圖1為逆光圖像生成原理圖,圖2 為逆光狀態(tài)下成像效果圖。

圖1 逆光圖像生成原理圖
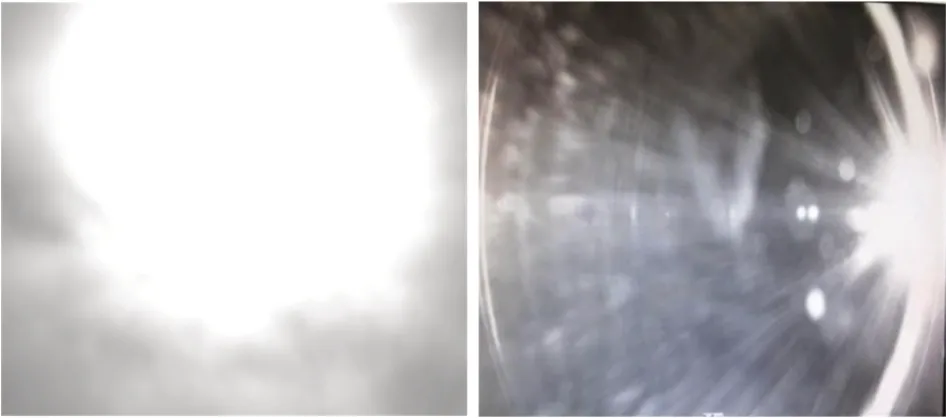
圖2 逆光狀態(tài)下成像效果圖
2 逆光成像手段
目前關(guān)于逆光檢測(cè)算法的理論研究比較少,主要包括基于細(xì)節(jié)的逆光圖像檢測(cè)、亮度直方圖法、多圖像融合算法等。典型的可用于逆光成像手段有事件相機(jī)和能量衰減。
1)事件相機(jī)
事件相機(jī)檢測(cè)每一像素點(diǎn)的事件——亮度變化,在亮度變化超過設(shè)定閾值時(shí)異步輸出像素地址事件流數(shù)據(jù)。事件相機(jī)是依靠動(dòng)態(tài)場(chǎng)景中光線變化進(jìn)行采樣,僅對(duì)亮度的相對(duì)變化敏感,而不受絕對(duì)光照影響,每個(gè)像素的光感受器以對(duì)數(shù)方式獨(dú)立工作,具有非常高的動(dòng)態(tài)范圍,對(duì)背景干擾與目標(biāo)信號(hào)進(jìn)行時(shí)域差分,起到隔離直流量的作用,可以抑制強(qiáng)背景光,進(jìn)而檢測(cè)運(yùn)動(dòng)目標(biāo)。圖3 為事件相機(jī)原理圖。

圖3 事件相機(jī)原理圖
2)能量衰減
能量衰減主要是通過“衰光+自適應(yīng)曝光“的組合。衰光是將具有吸收特性的衰光片固定在光路中,直接達(dá)到衰減信號(hào)的目的;自適應(yīng)曝光是通過調(diào)整相機(jī)積分時(shí)間的形式來控制傳感器的感光能量,從而控制圖像的成像亮度,使得成像適合目標(biāo)觀測(cè),具體方法是通過太陽圖像識(shí)別程序,判斷視場(chǎng)中是否出現(xiàn)部分或全部太陽,當(dāng)視場(chǎng)范圍內(nèi)出現(xiàn)太陽時(shí),自動(dòng)減小曝光時(shí)間,使太陽光的灰度等級(jí)較低,從而使探測(cè)器工作在非飽和區(qū)。圖4 為能量衰減原理圖。
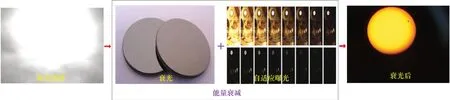
圖4 能量衰減原理圖
上述2 種手段在一定程度上可解決逆光成像問題,但均存在部分局限性:事件相機(jī)在對(duì)相對(duì)運(yùn)動(dòng)角速度低的目標(biāo)進(jìn)行探測(cè)時(shí),時(shí)域差分無法分離目標(biāo)信號(hào),對(duì)于空間目標(biāo)逆光探測(cè)缺乏實(shí)用性;現(xiàn)有能量衰減策略通常是降低曝光時(shí)間,由于能量衰減過多,目標(biāo)極易被淹沒在噪聲中,屬于典型的“看不見”難題。
3 基于速度估計(jì)的目標(biāo)能量累積算法
能量衰減通常采用衰光和低積分時(shí)間組合的能量衰減策略以獲得非飽和清晰圖像,此方法會(huì)極大地降低目標(biāo)信噪比。為了盡可能地提高目標(biāo)的信噪比,本文首先通過直方圖自適應(yīng)的方法計(jì)算最佳曝光時(shí)間,控制探測(cè)器工作在目標(biāo)最佳信噪的線性區(qū),在此基礎(chǔ)上,采用速度估計(jì)的目標(biāo)能量積累算法,將弱小目標(biāo)轉(zhuǎn)換為高信噪比的強(qiáng)目標(biāo)。
1)自適應(yīng)曝光策略
為了使目標(biāo)達(dá)到最佳信噪比,將整幅圖像分為太陽圓斑內(nèi)與太陽圓斑外,利用直方圖將太陽圓斑內(nèi)、外灰度變化后,分別統(tǒng)計(jì)當(dāng)前幀太陽圓斑內(nèi)、外的灰度值,根據(jù)灰度等級(jí)及曝光參數(shù),從而判斷得出下一幀太陽圓斑范圍內(nèi)、外的最佳曝光時(shí)間,然后利用信噪比與圓斑內(nèi)、外曝光時(shí)間的關(guān)系,得出整幅圖的最佳曝光時(shí)間。已知圖像灰度平均值計(jì)算如下:

式中,為圖像統(tǒng)計(jì)平均值,為加權(quán)系數(shù),為第個(gè)像元,為整個(gè)靶面整個(gè)像素個(gè)數(shù)。已知曝光時(shí)間與圖像亮度均值之間的關(guān)系如下:

式中,為成像圖像的灰度值,為圖像最高灰度值,為曝光時(shí)間為1 個(gè)單位時(shí)成像的灰度值,為圖像的積分時(shí)間。
對(duì)太陽圓斑范圍內(nèi)、外統(tǒng)計(jì)直方圖,利用直方圖自動(dòng)統(tǒng)計(jì)最佳曝光時(shí)間,使得目標(biāo)達(dá)到最佳信噪比,為后續(xù)目標(biāo)提取創(chuàng)造有利條件。圖5 為太陽圓斑范圍內(nèi)、外直方圖統(tǒng)計(jì)。
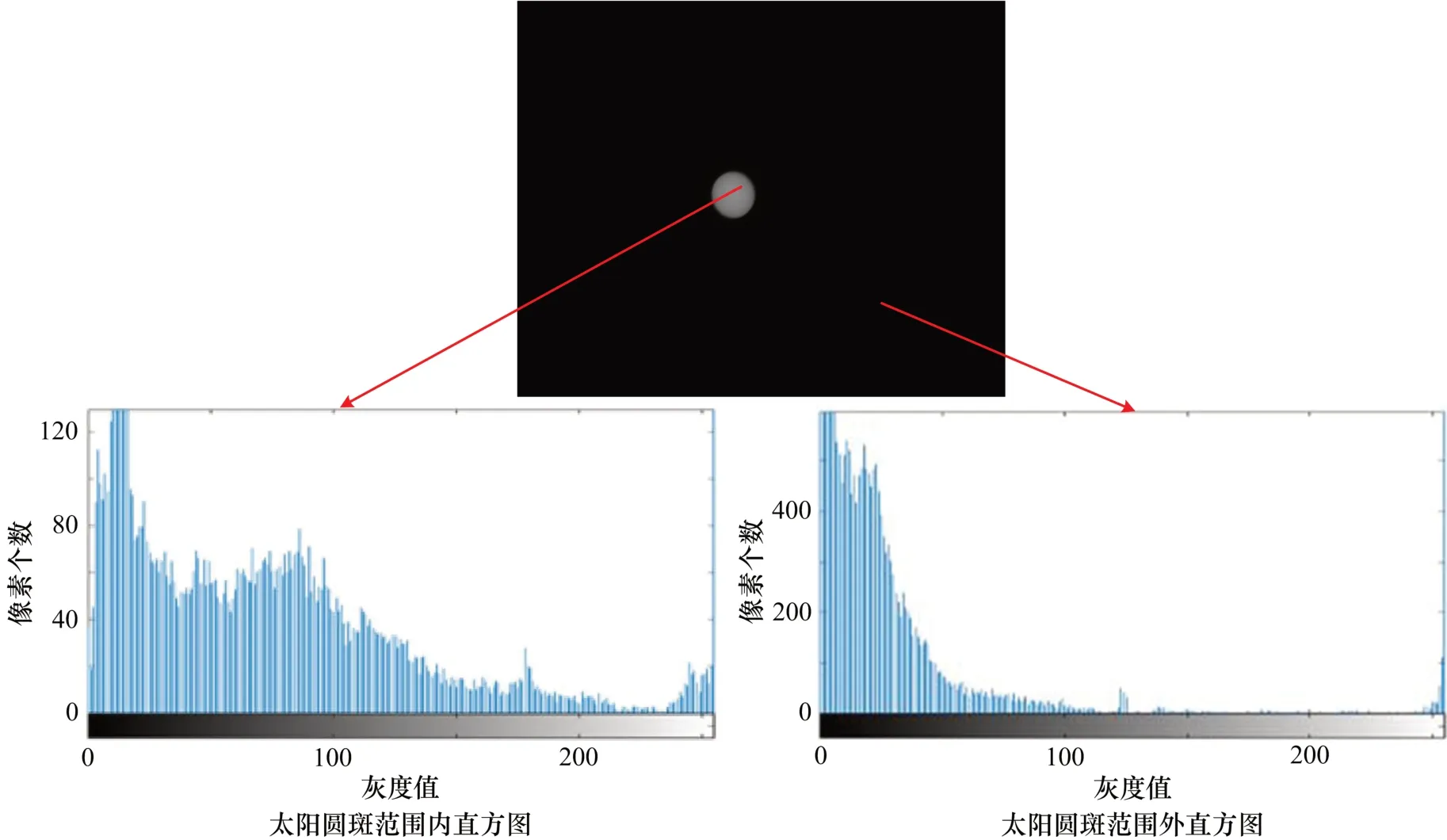
圖5 太陽圓斑范圍內(nèi)、外直方圖
2)目標(biāo)能量累積算法
空間圖像背景噪聲為高斯白噪聲,由于白噪聲空域隨機(jī)性的特點(diǎn),且互不相關(guān),其符合正態(tài)分布(0,),采用多幀疊加的方法,有效地壓縮圖像噪聲,提高圖像信噪比。其中,點(diǎn)目標(biāo)圖像的信噪比定義為:

式中,為目標(biāo)點(diǎn)的峰值灰度,為背景的平均灰度,σ為噪聲均方差。
幅連續(xù)靜態(tài)圖像疊加后的噪聲方差為:

則均方差為:

經(jīng)過幀累加后圖像的信噪聲比為:

結(jié)合式(3)、(6)可得,經(jīng)過幀累加后圖像信噪比增益為:

即信噪比可提升為原來的倍。
3)速度估計(jì)
對(duì)于靜止目標(biāo),采用多幀圖像直接累加的方法可以有效地提高圖像的信噪比、消除噪聲的影響。而在實(shí)際應(yīng)用的過程中,大多數(shù)目標(biāo)是運(yùn)動(dòng)的,即目標(biāo)在每一幀圖像上的位置是不同的,對(duì)于運(yùn)動(dòng)目標(biāo)采用直接累加的方式會(huì)使目標(biāo)能量擴(kuò)散,無法滿足運(yùn)動(dòng)目標(biāo)信噪比提升的目的。因此,針對(duì)運(yùn)動(dòng)目標(biāo),需要沿著運(yùn)動(dòng)軌跡進(jìn)行能量累加。
本文采用幀間移位累加的方法,即每一幀中的目標(biāo)在運(yùn)動(dòng)一段距離后再進(jìn)行互累加,以使不同幀中的目標(biāo)區(qū)域圖像能夠?qū)R,以第1 幀和第幀為例,由于遠(yuǎn)距離的小目標(biāo)速度變化較慢,將目標(biāo)運(yùn)動(dòng)看做勻速運(yùn)動(dòng)。假設(shè)在(-1)圖像中目標(biāo)在水平方向、豎直方向上的速度為V、V,其中,多幀移動(dòng)的距離一般小于1 個(gè)像素。第1 幀目標(biāo)在圖像上的位置為(1)、(1),第幀時(shí)目標(biāo)的位置為:

則第1 幀到第幀目標(biāo)在圖像上水平、垂直方向的位移分別為:

將第幀的目標(biāo)區(qū)域移動(dòng)d,d后與第1 幀圖像進(jìn)行能量的累加,即可以看作靜止多幀累加。在空間探測(cè)中,只有獲得目標(biāo)運(yùn)動(dòng)的真實(shí)速度,才能根據(jù)目標(biāo)運(yùn)動(dòng)軌跡進(jìn)行能量累加,故必須準(zhǔn)確地獲取目標(biāo)的真實(shí)運(yùn)動(dòng)速度。
由于在運(yùn)動(dòng)過程中,假設(shè)的速度已知,但假設(shè)速度和實(shí)際速度之間存在誤差,不可避免地會(huì)造成能量的擴(kuò)散,從而形成拖尾,因此可以通過拖尾可反推出目標(biāo)的真實(shí)速度。其中,假設(shè)速度和真實(shí)速度之間的關(guān)系圖如圖6 所示。
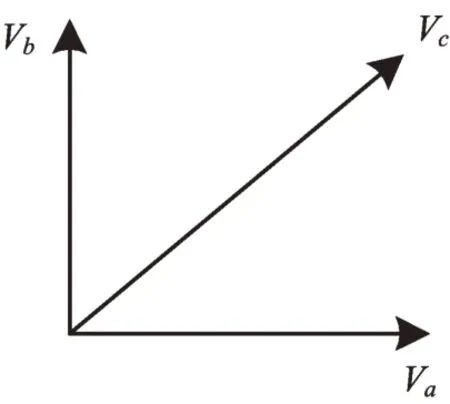
圖6 速度合成圖
圖6 中V、V分別為目標(biāo)的真實(shí)速度與假設(shè)速度,V為合成速度,拖尾的形成可以看作是目標(biāo)以合成速度在圖像中留下的痕跡。設(shè)拖尾在水平方向、垂直方向的投影長(zhǎng)度分別為l、l,目標(biāo)在水平方向、垂直方向的真實(shí)速度分別為V、V,目標(biāo)在水平方向、垂直方向的假設(shè)速度分別為V、V,則累加-1 幀后,有:

即目標(biāo)在,方向的真實(shí)速度分別為:

獲取目標(biāo)在水平方向、垂直方向的真實(shí)速度后,通過幀間移位累加的方式,將弱小目標(biāo)提取出來,從而達(dá)到提高目標(biāo)信噪比的目的。目標(biāo)在強(qiáng)光背景下、完全逆光狀態(tài)下處理結(jié)果如圖7、圖8 所示。

圖7 強(qiáng)光背景下(恢復(fù)成強(qiáng)目標(biāo))
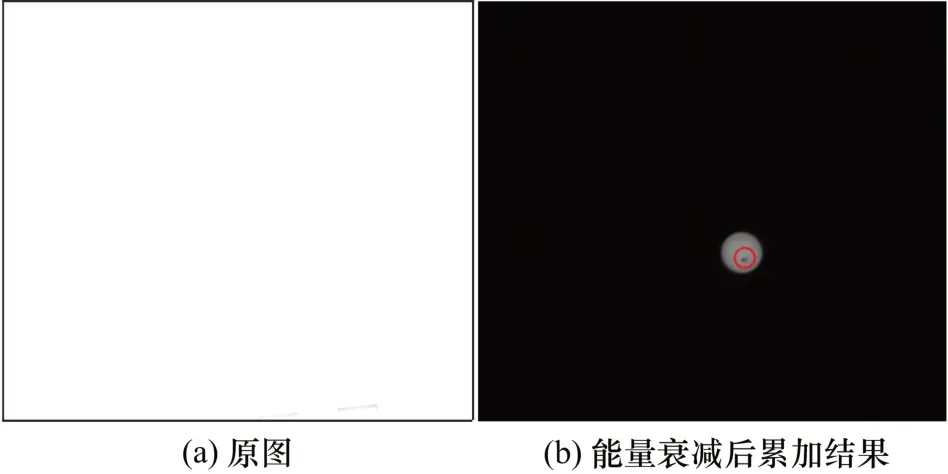
圖8 完全逆光狀態(tài)下(恢復(fù)成強(qiáng)目標(biāo))
4 結(jié)束語
本文對(duì)空間弱小目標(biāo)成像探測(cè)面臨的問題進(jìn)行梳理,通過比對(duì)典型逆光探測(cè)手段,提出采用能量衰減體制將目標(biāo)控制在最佳信噪比區(qū),便于后續(xù)目標(biāo)提取。在此基礎(chǔ)上,結(jié)合基于速度估計(jì)的目標(biāo)能量累積算法,達(dá)到提高目標(biāo)信噪比的目的,實(shí)現(xiàn)強(qiáng)光背景下的弱小目標(biāo)檢測(cè)與提取。該技術(shù)可廣泛應(yīng)用于空間目標(biāo)監(jiān)視、檢測(cè)等領(lǐng)域,為平臺(tái)威脅告警、戰(zhàn)場(chǎng)態(tài)勢(shì)感知等任務(wù)提供必要的技術(shù)支撐,提升空間作戰(zhàn)域的綜合能力。