基于CEEMDAN-ELM-Adaboost 的水電機組故障診斷
2022-10-27 09:42:56游仕豪鄭陽閆懂林陳盛陳天涯陳啟卷
中國農村水利水電 2022年10期
游仕豪,鄭陽,閆懂林,陳盛,陳天涯,陳啟卷
(武漢大學動力與機械學院,湖北武漢 430072)
0 引言
水電機組是水電能源轉換的核心設備,其高效安全穩定運行是保證電站安全和電網穩定的重要前提。因此,開展水電機組故障診斷研究,能減少水電機組事故的發生,對保障電網安全穩定的運行具有重要意義。
到目前為止,學者們針對水電機組的故障診斷進行了諸多研究。黨建等[1]通過經驗模態分解(EMD)和連續幾何分布相似性結合實現對水電機組振動信號降噪;杜義等[2]提出經驗模態分解的奇異值為基礎的水電機組特征提取方法,并結合時域和頻域特征,實現對工況的精確識別;陳喜陽[3]等利用PSO優化BP 神經網絡的連接權值,提高BP 分類器的識別速度和精度。何葵東[4]等通過采用EEMD 分解后各本征模態函數(IMF)的多尺度熵作為特征值,并結合極限學習機(ELM)對水電機組進行故障診斷。
經過上述的分析可以看出,現已形成了以信號去噪、信號特征提取、診斷模型構建為核心的水電機組故障診斷基本流程。在信號去噪方面,EMD降噪[1],小波降噪[5]、EEMD[6]降噪等方法被廣泛使用。但上述降噪方法分別存在模態混疊、適應范圍不廣泛、IMF分量中殘留白噪聲等問題,往往導致降噪的效果不理想。本文采用CEEMDAN 方法[7]對振動信號進行降噪處理,能很好的解決模態混疊現象和信號中殘留白噪聲的問題。在信號特征提取方面,單一的時域特征、頻域特征或者信號復雜程度等特征往往不能全面地表征信號特性,在本文中,分別對時域、頻域和各IMF 分量樣本熵進行提取,構建混合特征向量來表征振動信號特性。最后對于模型構建方面,BP 神經網絡[8]、SVM[9]、樸素貝葉斯網絡[10]等方法被廣泛使用,但存在訓練速度慢、精度較低等問題。而GAO Huang等[11]提出了極限學習機(ELM),該方法無需通過迭代調節網絡參數,因此訓練速度得到大幅提升,具有學習速度快、泛化能力強等優點。本文利用Adaboost算法[12]和ELM 進行組合,能大大提高對水電機組故障診斷的精度和穩定性。
綜上,本文將首先對機組原始振動信號利用CEEMDAN 進行分解降噪和重構。然后對降噪后的水電機組振動信號,提取常規的時域和頻域特征,通過特征的離散程度大小實現特征的降維,并結合CEEMDAN 分解后主要IMF 分量的樣本熵構建混合特征向量,將其作為ELM-Adaboost 強分類器的輸入最終得到智能診斷模型,從而實現對水電機組實測振動故障樣本集的高精度識別診斷。
1 研究方法
1.1 CEEMDAN
完全自適應噪聲集合經驗模態分解(CEEMDAN)是互補集合經驗模態分解(CEEMD)算法的一種改進算法,該方法能更有效地消除模態混疊現象并且分解后的IMF 分量中無白噪聲殘留[7]。CEEMDAN分解的步驟如下:
(1)將服從正態分布的高斯白噪聲uj(t)(j=1,2,…,N為加入白噪聲的次數)加入待分解信號y(t)中得到新信號y(t)+εvj(t),對其進行EMD 分解,得到第一階本征模態函數分量C1,對產生的N個模態分量取均值得到CEEMDAN 分解的第一個IMF分量為:
(2)計算原始信號去除IMF1后相應的殘差。

(3)在殘差r1(t)中加入服從正態分布的高斯白噪聲uj(t)(j=1,2,…,N為加入白噪聲的次數)得到新信號,對新信號進行EMD分解得到第一階模態分量D1,則有:

(4)計算相應的殘差。

(5)重復上述步驟,直至殘差信號為單調函數且不適合被分解時,算法結束。此時得到m個本征模態函數分量和剩余的殘差分量。則原始信號可以表示為:

1.2 ELM-Adaboost強分類器
Adaboost 算法[12]的核心是合并多個弱分類器的輸出實現更加精確的分類,從而形成強分類器。ELM-Adaboost強分類器即把ELM 分類算法作為弱分類器,通過多次迭代訓練ELM 分類器,并通過Adaboost 算法賦予每個ELM 分類器相應的權重并組合成強分類器。ELM-Adaboost 強分類器相比傳統的ELM 弱分類器具有分類精度高,分類結果波動性小的優點,其具體步驟如下[13]:
(1)隨機選擇m組樣本作為強分類器的訓練數據,賦予每組樣本初始權值D1,同時根據數據的輸入輸出確定ELM 弱分類器的輸入層、隱含層和輸出層中神經元的個數。
(2)對于每次迭代t(t為ELM-Adaboost 中ELM 弱分類器的個數),重復以下步驟:
①訓練第t個ELM 弱分類器并對訓練數據的輸出進行預測,得到訓練數據的預測序列g(t)以及其預測誤差和et,預測誤差和的計算公式為:

②根據第t個弱分類器的預測誤差和et計算該分類器的權重αt,分類器權重計算公式為

③根據弱分類器的權重αt調整下一次迭代中訓練樣本的權重,調整公式為

式中:Bi是歸一化因子,i=1,2,…,m
(3)經過n次迭代后,得到n組弱分類器的輸出函數f(gt,αt),并將其組合成強分類的輸出函數h(x)。

1.3 基于CEEMDAN-ELM-Adaboost 的故障診斷流程
基于CEEMDAN-ELM-Adaboost 的水電機組故障診斷流程如圖1所示,其步驟如下:利用CEEMDAN 對振動信號進行分解重構,實現對振動信號的降噪。提取樣本數據的IMF 樣本熵特征、時域特征和頻域特征,建立包含21個特征的特征數據池,充分挖掘出蘊藏在振動信號中的故障信息。考慮到特征量之間可能存在耦合性和特征冗余性,故對特征池中的特征量做降維處理,從每類特征數據中篩選出差異性明顯的特征,構建包含樣本數據的時域、頻域以及IMF 樣本熵的混合特征向量矩陣,將所有樣本的混合特征向量劃分為訓練集和測試集,輸入到ELM-Adaboost 強分類器中訓練強分類器模型并輸出測試集的預測結果。
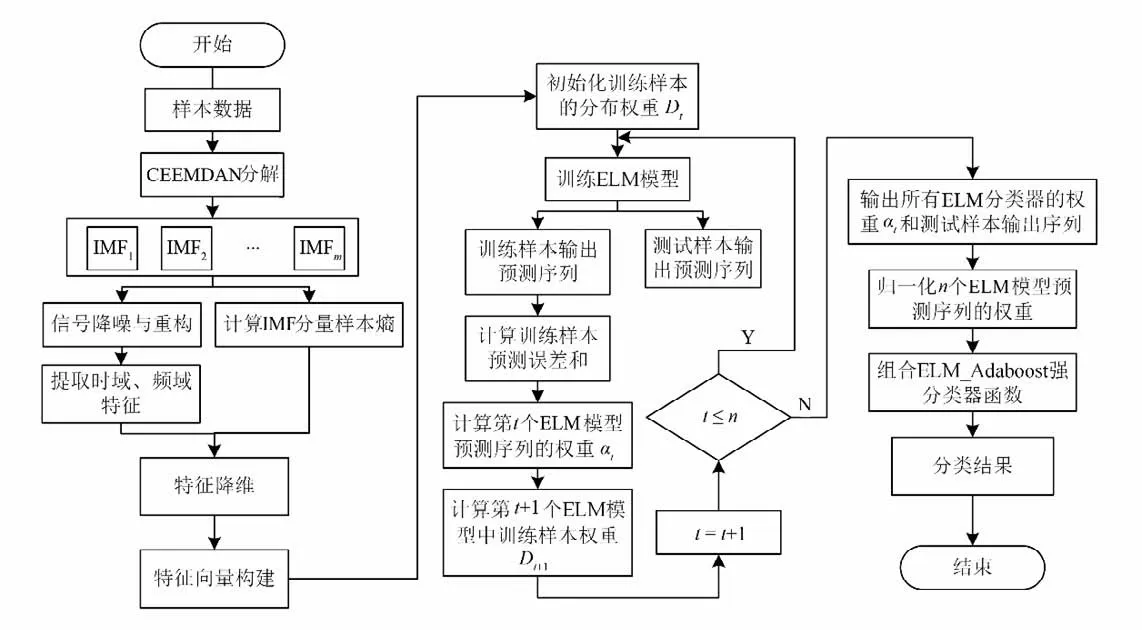
圖1 基于CEEMDAN-ELM-Adaboost的故障診斷流程圖Fig.1 Fault diagnosis flow based on CEEMDAN-ELM-Adaboost
2 實例研究
2.1 數據來源
本文數據來源于某水電站的三號機組,該機組水輪機型號ZZA315-LJ-800,發電機型號SF200-56/11950,額定功率200 MW,立軸半傘式。分析數據為機組主軸軸向的振動數據,機組故障類型為轉輪室碰摩故障。分別將采自于機組故障發生前的數據標記為故障預警狀態、故障發生后的數據標記為故障狀態、檢修后正常運行的數據標記為正常運行狀態,其中每種狀態數據各40組,每組數據波形長度為4 096 個采樣點,數據點的采樣頻率為458 Hz。
2.2 數據降噪
對每個樣本中的原始振動信號進行CEEMDAN 分解,經過多次試驗分析,設定加入高斯白噪聲的次數為100,高斯白噪聲標準差為0.2,最大的迭代次數為1 000。信號分解得到若干個IMF分量,同時計算每個IMF分量與原始振動信號的相關系數,各個IMF分量的相關系數如表1所示。由表1可知,前幾個IMF分量與原始信號的相關系數較大,能很大程度地表征原始信號的特征,故可通過選取前幾個相關系數較大的IMF 分量進行重構從而達到信號去噪的效果[14-16]。綜合120 個樣本的分解結果,本文選取前6個IMF分量進行信號重構。

表1 IMF分量與原始數據的相關系數表Tab.1 Table of IMF components in relation to raw data
2.3 特征提取及降維
為更加全面獲取振動信號深度蘊含的信息,提高故障診斷的準確性,本文對樣本數據中常規的時域特征、頻域特征和各IMF 分量的樣本熵進行提取,提取的特征及其對應的編號如表2所示。

表2 振動信號特征集Tab.2 Characteristic set of vibration signal
考慮到提取的特征量過多,特征量之間可能存在耦合性和特征冗余性,本文對提取的高維特征集進行降維處理,通過特征值離散程度的差異對提取的特征進行篩選。計算14個時域、頻域特征的標準差,得到各特征的離散程度(即標準差的大小)見圖2。由圖2 可知,部分特征的離散程度幾乎趨近于0,即特征值基本都聚集于某一個值的附近,不能對3 種運行狀態進行有效區分,故分別剔除掉時域特征和頻域特征中離散程度較小的無效特征。通常前幾個IMF 分量集中了原始振動信號中最顯著、最重要的信息[17]。為保證提取特征的代表性和算法運行的快速性,本文選用CEEMDAN 分解后的前3 個與原始信號相關性系數較大的IMF 分量并計算其樣本熵,最后篩選出T1、T4、T5、F2、F3、F4、S1、S2、S3九個特征用來構建混合特征向量。
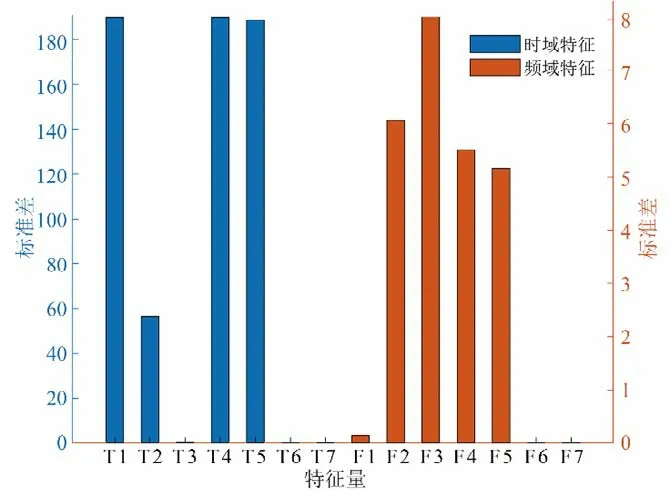
圖2 樣本特征的離散程度Fig.2 Degree of dispersion of sample features
圖3、4 和圖5 分別為特征降維處理后的篩選出的時域特征、頻域特征和樣本熵在不同樣本上的分布圖,其中樣本序號1~40 為正常運行樣本,序號41~80 為故障預警樣本,序號81~120為故障樣本。由圖3、4和圖5可知,在所篩選出的特征分布圖中,故障樣本和其他兩種樣本有較明顯的差異,正常運行樣本和故障樣本在部分特征上的分布上也存在差異。

圖3 樣本的時域特征分布圖Fig.3 Time-domain distribution of the sample

圖4 樣本的頻域特征分布圖Fig.4 Frequency domain feature distribution of the sample

圖5 樣本的IMF樣本熵分布圖Fig.5 IMF sample entropy distribution of samples
2.4 ELM-Adaboost分類
將降維后的9 個特征組合成混合特征向量,其格式為[T1,T4,T5,F2,F3,F4,S1,S2,S3]。依據每種運行狀態對120 組樣本按6∶4 的比例隨機劃分為72 組訓練集和48 組測試集。首先對ELM-Adaboost 的輸入參數進行初始化,經過多次試驗分析,設定ELM 選取的個數為10,ELM 的輸入層節點數為9,輸出層節點數為3,單隱含層的節點數為50,激活函數為sigmoid 函數。利用訓練樣本對模型進行訓練,對比在EMD 和CEEMDAN 兩種不同降噪方法下不同分類方法的分類準確性。考慮到ELMAdaboost 算法在水電機組小樣本故障診斷上的適用性,設置訓練集和測試組樣本數量比例為4∶6 的對照組,并對每種組合運行100 取平均值來避免隨機誤差的影響,對比試驗結果如表3所示。其中實驗組中最能代表平均結果的分類結果見圖6和圖7。
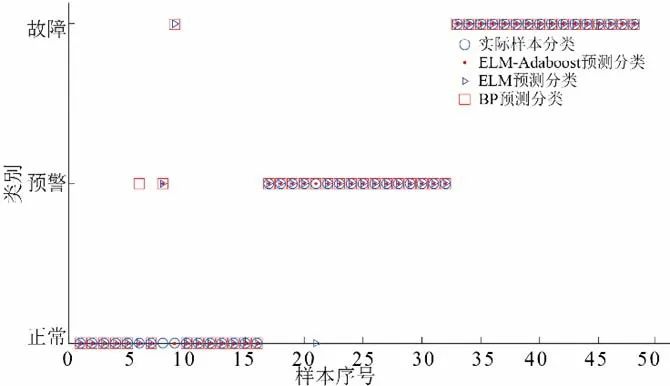
圖6 基于CEEMDAN降噪的分類結果Fig.6 Classification result based on CEEMDAN denoising

圖7 基于EMD降噪的分類結果Fig.7 Classification result based on EMD denoising
從表3 可知,相比于EMD 分解降噪,利用CEEMDAN 方法進行降噪可以提高分類的準確性。此外,對比相同降噪方法下的3 中分類方法的分類情況,ELM-Adaboost 相比于ELM 和BPNN 分類方法,其對水電機組的故障分類更加精確。同時ELM-Adaboost 也繼承了ELM 網絡訓練速度快的優點,其相比于BPNN 分類方法其運行時間更短。最后,相比于其他兩者分類方法,ELM-Adaboost 方法在水電機組小樣本故障分類問題上,其識別精度基本不隨樣本數量的變化而變化,表現出良好的魯棒性。綜上,本文提出的基于CEEMDAN-ELM-Adaboost的水電機組故障診斷方法相比于傳統方法具有更好的應用性。

表3 分類準確度對比Tab.3 Comparison of classification accuracy
3 結論
本文提出了基于CEEMDAN-ELM-Adaboost 的水電機組故障診斷方法,并利用水電機組轉輪室碰摩故障的實際數據進行分析,得到以下結論。
(1)相比于傳統的EMD 降噪方法,通過CEEMDAN 對原始信號降噪能提高后續故障分類的準確性。
(2)相對于傳統的BPNN 和ELM 方法,ELM-Adaboost 方法在水電機組小樣本的故障分類問題上具有更高的識別精度和魯棒性。此外,該方法在保證高識別率的前提下具有訓練速度的特點。
(3)CEEMDAN-ELM-Adaboost方法在水電機組轉輪室碰摩故障識別問題上具有很好的適應性,其識別精度可以達到97.92%。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
