簡化伴流中螺旋槳空泡性能數值模擬方法
2022-10-28 08:34:04翟樹成馬艷劉登成洪方文
船海工程 2022年5期
翟樹成,馬艷,劉登成,洪方文
(中國船舶科學研究中心 船舶振動噪聲重點實驗室,江蘇 無錫 214082)
船后螺旋槳空泡變化特征主要來源于船后非均勻流場,采用船后螺旋槳整體方案來預報螺旋槳空泡性能時計算量較大。而在螺旋槳設計階段,出于商業秘密,有時并無船體三維模型,僅有船體主參數及伴流分布特征等輸入參數,此時就需要采用簡化伴流方法開展螺旋槳空泡性能預報。考慮分析簡化伴流中螺旋槳空泡性能與船后螺旋槳空泡性能的差異特征,為螺旋槳空泡性能設計提供快速可靠的預報方法。
1 模型對象
選擇典型的肥大型商船,相較于尖瘦型船舶,其艉部流場更復雜,伴流更大,空泡模擬更困難。船型及槳葉的主要參數見表1,坐標原點位于槳盤面與槳軸的交點,軸垂直向上,軸指向右舷,坐標系滿足右手法則,由船艉向船艏看,螺旋槳順時針旋轉為正,工況見表2。
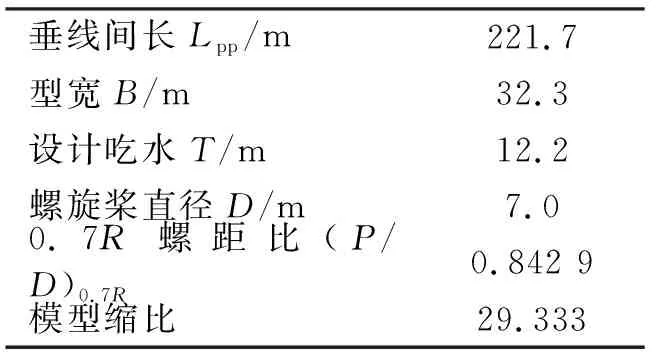
表1 船體及螺旋槳主參數(實船)

表2 計算工況
2 數值方法
2.1 網格及模擬過程
計算域范圍見圖1,自由液面處采用對稱邊界條件,入口、側面及底面采用速度入口邊界條件,出口采用壓力出口邊界條件。
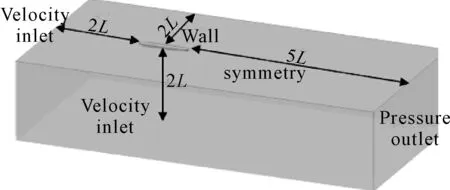
圖1 計算域及邊界條件
采用非結構化網格進行流體域劃分,船體物面及螺旋槳物面采用棱柱形網格進行加密處理,總層數為8層,增長比例為1.2(見圖2),船體壁面≈30,螺旋槳壁面≈20,總網格數約為980萬單元。
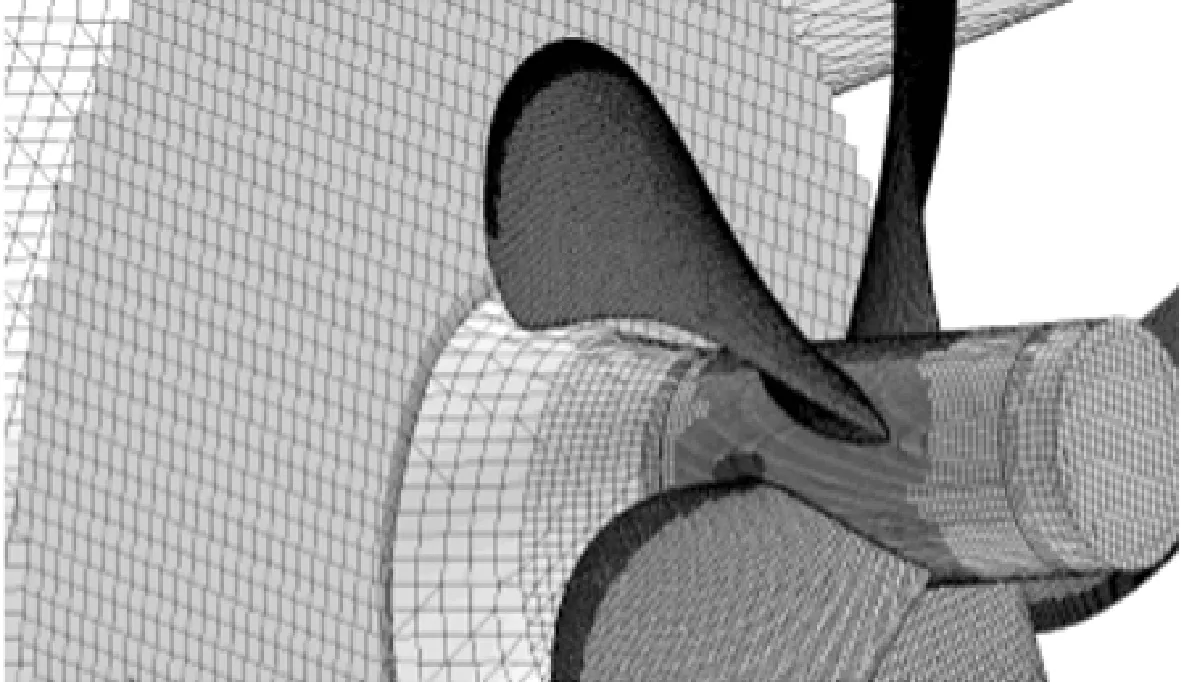
圖2 網格劃分模型
2.2 控制方程及空泡模型
假設汽/液多相流模擬時流體是均勻的,連續性方程和動量方程為
(1)


(2)
式中:是速度項;為力源項;為混合相壓力;為湍流粘性。這里采用適用于螺旋槳周圍復雜流場模擬的SST-湍流模型,空泡模型為Schnerr-Sauer空泡模型,空泡界面處理采用了VOF方法。
3 結果分析
3.1 船后標稱伴流
船后標稱伴流預報采用來流速度進行無量綱處理,定義12點鐘位置為0°,受到船體邊界層的影響,在0°附近形成了較明顯的低速區域。
3.2 簡化伴流條件下螺旋槳空泡性能
采用標稱伴流作為入流邊界條件模擬螺旋槳空泡形態,計算域見圖3。
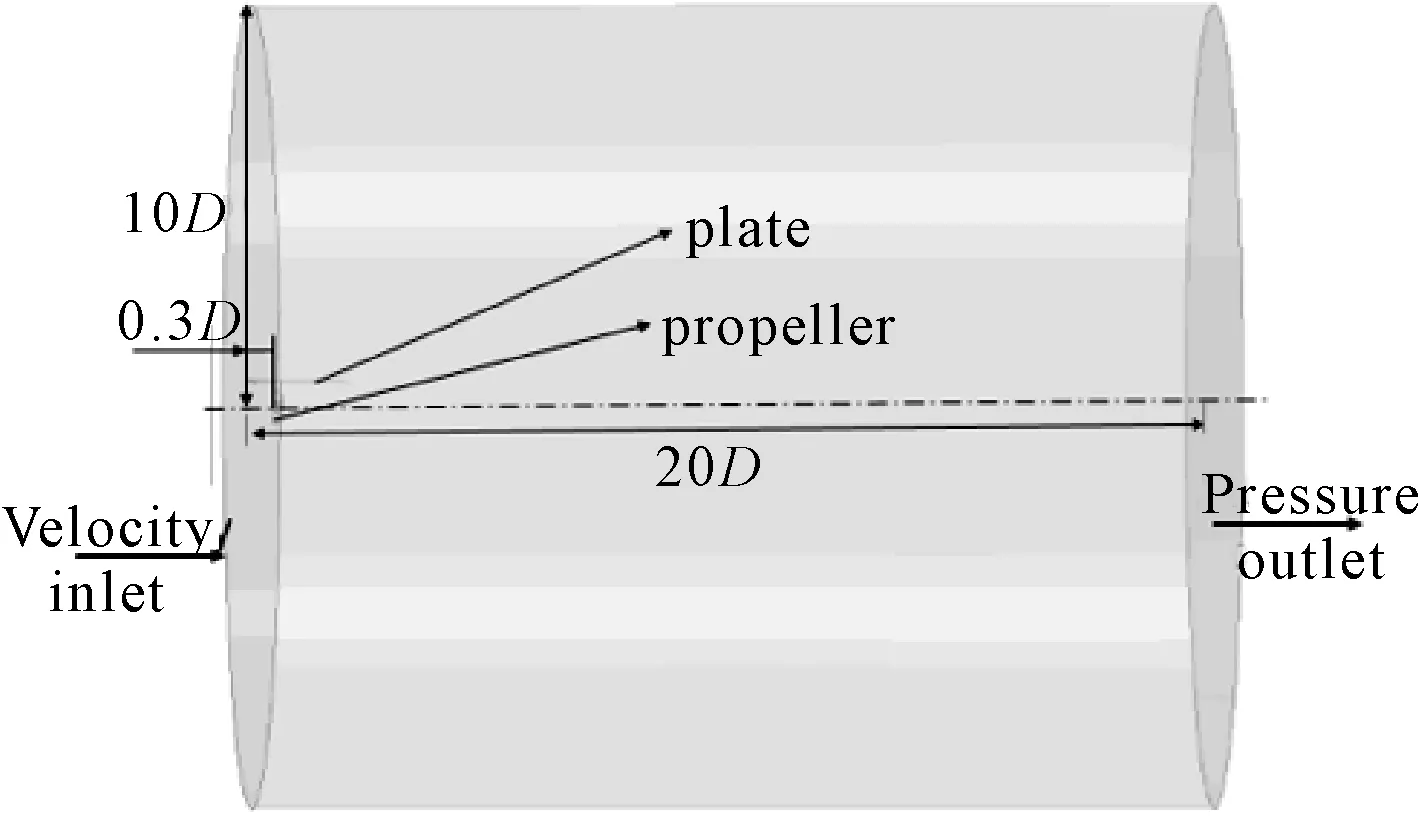
圖3 計算域
總網格數約為2.1×10,約為船后螺旋槳總網格數量的1/4,因此可以提高螺旋槳空泡預報效率4倍。通過調整入流場的水速,使螺旋槳推力系數達到所需要的值。采用簡化方法模擬螺旋槳空泡性能時,為了監測空泡誘導脈動壓力,在螺旋槳上方布置一平板模擬船底板以監測脈動壓力。平板下表面與槳葉梢部的距離滿足梢隙比要求,平板寬度及長度與船底板相當。
簡化伴流下螺旋槳空泡形態與船后螺旋槳空泡形態的比較見圖4,可以看到在簡化伴流下預報的螺旋槳空泡特征與船后螺旋槳空泡特征相似。在槳葉位于-10°時,試驗中空泡形狀出現于0.8,呈點狀出現,而仿真結果呈現片狀出現,徑向范圍較寬,0°位置時,試驗中導邊片空泡未延伸至梢部,而仿真模擬結果均延伸至梢部,10°位置時,試驗中空泡凸出部分更靠隨邊。隨后片空泡與梢渦空泡相互作用,并形成不穩定梢渦空泡拖泄至下游,仿真結果同樣預報出這一現象,但梢渦空泡的長度及范圍較試驗值更小。
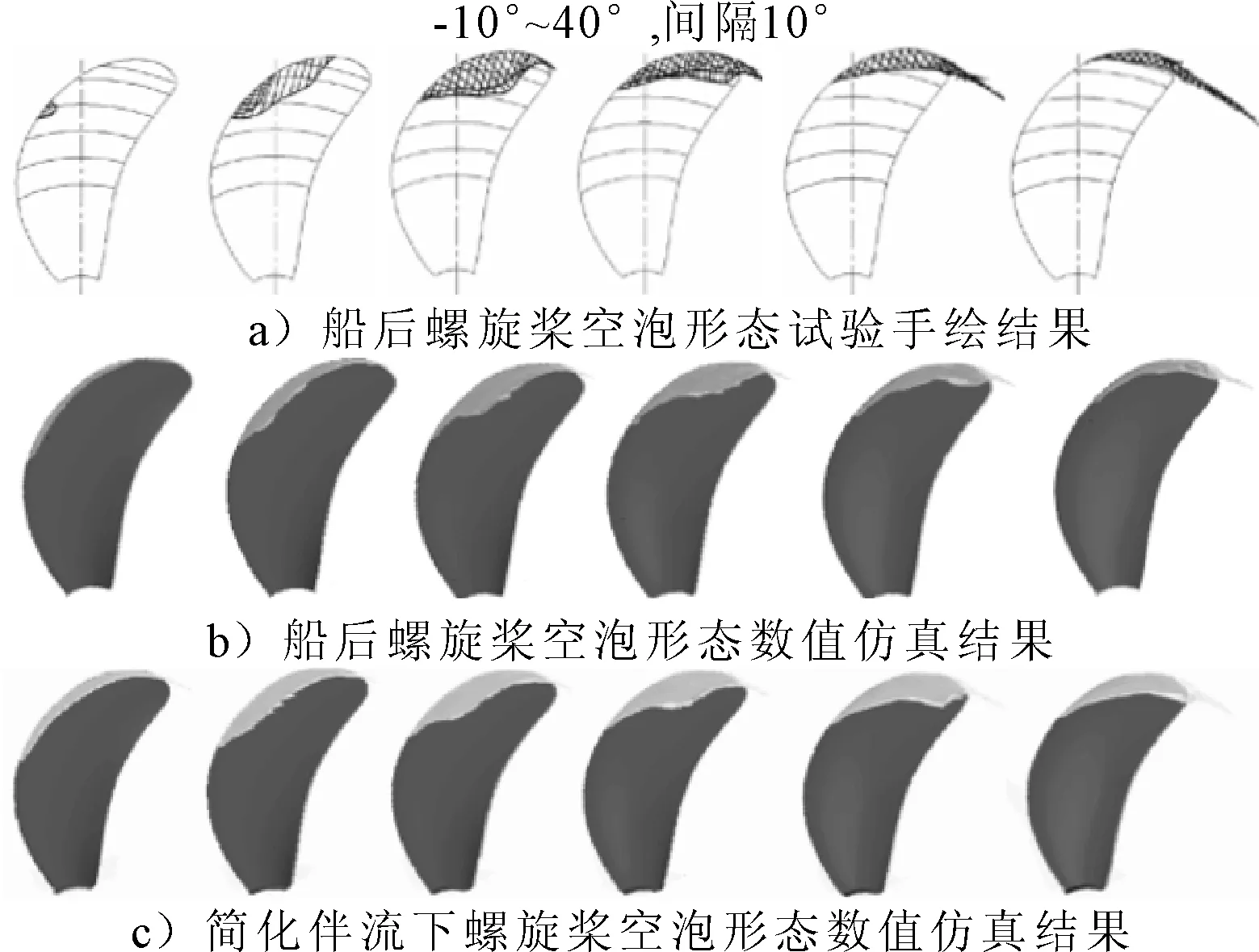
圖4 螺旋槳空泡形態比較
脈動壓力監測點位置見圖5,空泡誘導的船體脈動壓力比較見圖6。
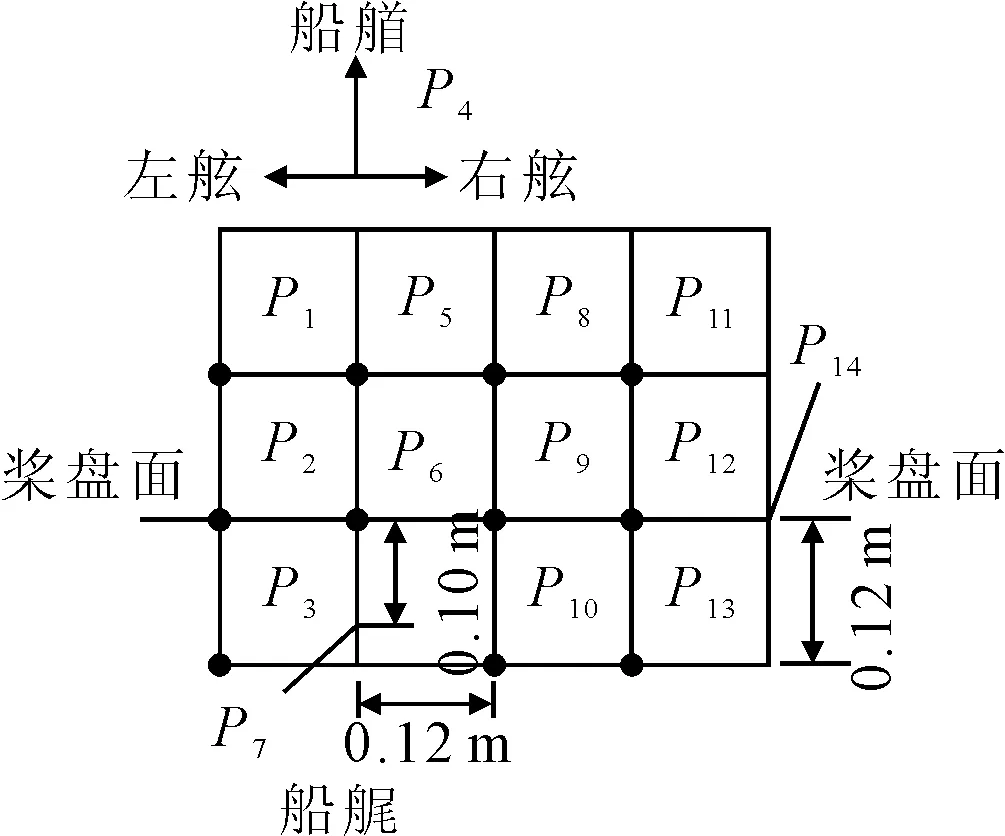
圖5 脈動壓力監測位置示意
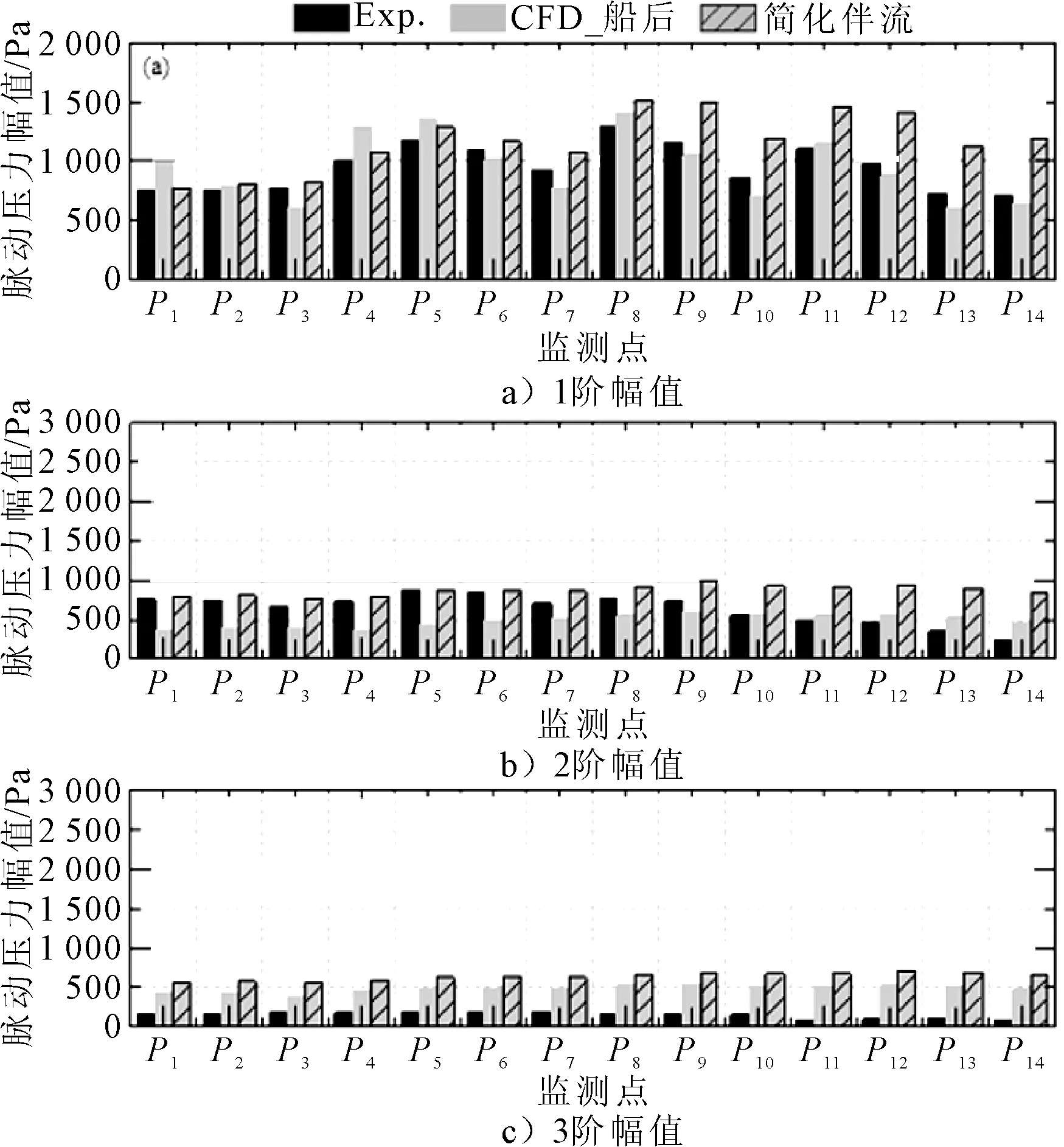
圖6 脈動壓力幅值比較
將脈動壓力時序監測信號通過快速傅里葉方法換算至頻域,然后提取1階、2階和3階葉倍頻處的脈動壓力幅值進行分析。采用簡化伴流方法獲得空泡誘導船體脈動壓力1階值在~位置均能夠與船后預報以及船后試驗結果吻合較好,而~均偏大,2階值同樣有此現象。因為這些點位于船側,船體的弧度導致船后狀態螺旋槳空泡離監測點的距離大于簡化伴流時螺旋槳空泡離檢測點的距離,導致簡化伴流模擬時這些位置的脈動壓力仿真結果較試驗結果偏大。3階值無論是船后或者是指定伴流預報結果均較試驗值偏大。空泡自身脈動及梢渦空泡是影響2階、3階量的重要因素之一,此外,指定伴流模擬時空泡形態預報結果稍大,也是導致空泡誘導脈動壓力幅值偏高的原因之一,若采用更精細的梢渦空泡模擬可以提高脈動壓力的預報精度,但是計算量會成倍增加。
4 結論
1)受到船體邊界層的影響,船后標稱伴流場在周向0°附近形成了明顯的低速區域。
2)螺旋槳空泡預報結果及發展過程與試驗吻合較好,采用簡化伴流方法預報捕捉到了相同的空泡形態以及發展特征,包括片空泡凸出部隨槳葉轉動角度的移動過程以及與梢渦空泡的相互作用過程等,數值模擬方法預報獲得了梢渦空泡特征,但梢渦空泡長度較試驗結果梢短。
3)簡化伴流方法預報的螺旋槳空泡脈動壓力預報結果與船后及試驗結果吻合較好。
4)采用簡化伴流的方法所獲得的螺旋槳空泡特征能夠較好地反映船后螺旋槳空泡性能,可以滿足螺旋槳設計中所需的船后螺旋槳空泡性能評估;同時,由于計算過程中不包含船體模型,計算時間大大縮短,可提高螺旋槳空泡性能預報效率。