無人駕駛高速插秧機田間作業對比試驗研究
2022-10-30 05:55:12張文斌嚴宇葉濤胡軍
農業裝備與車輛工程 2022年3期
關鍵詞:作業
張文斌,嚴宇,葉濤,胡軍
(215128 江蘇省 蘇州市 蘇州市農業機械技術推廣站)
0 引言
農業機械自動導航是精準農業技術體系中的一項核心關鍵技術[1]。隨著導航技術的快速發展,基于衛星導航系統的無人駕駛技術廣泛應用于水稻機插秧種植環節[2-3]。張智剛[4]等在久保田SPU-68 型插秧機上開發了基于差分全球定位系統和電子羅盤的導航系統,提升了直線路徑跟蹤時的定位精度;偉利國[5]等在XDNZ630 型水稻插秧機上采用RTK GPS 技術和PID 微分控制算法,在進一步提升直線行駛精度的基礎上,實現了調頭轉向的控制。何杰[6]等以井關PZ-60 型水稻插秧機為試驗平臺,設計了一款聯合導航控制系統,試驗結果表明該導航系統控制插秧機作業時具有良好的效果,滿足無人駕駛時自動作業的需求。近年來,農芯科技、豐疆智能、上海聯適等導航公司在插秧機優化設計、自動導航和作業過程智能調控等領域進行了深入研究[7]。
為探究無人駕駛高速插秧機的作業效果,本文以前裝豐疆FJ1001 型智能控制高速插秧機、后裝農芯HS2000BD-2.5RD 型自動導航系統的高速插秧機和常規高速插秧機為試驗對象,圍繞行駛性能、插秧作業效果和經濟效益等方面開展田間作業對比試驗研究,為智能農機推廣應用提供裝備與技術參考。
1 無人駕駛插秧機工作原理
導航定位、路徑規劃和路徑跟蹤是農機無人駕駛系統的3 個關鍵技術[8-10]。通過對高速插秧機進行智能化改裝,搭建智能駕駛控制系統的硬件平臺,包括信息獲取系統、決策控制系統、部件執行系統,實現對插秧機無人駕駛,如圖1 所示。無人駕駛插秧機由信息獲取系統對作業田塊進行數據采集,決策控制系統進行路徑規劃,生產便于插秧機識別的控制信息,最后由部件執行系統進行行駛作業。插秧機作業環境較為惡劣,使得插秧機作業方向極易發生變化,作業過程中,通過信息獲取系統得到插秧機前輪轉角信息,再由決策控制系統對比預設作業路徑,實時調整前輪轉角,進而保證插秧作業質量。

圖1 智能駕駛控制系統硬件平臺Fig.1 Hardware platform of intelligent driving control system
2 試驗設計
2.1 試驗機具
本文試驗機具是前裝無人駕駛高速插秧機、后裝無人駕駛高速插秧機和常規高速插秧機3 款機具(下文3 款機具簡稱:豐疆前裝、農芯后裝、常規機型),如表1 所示。
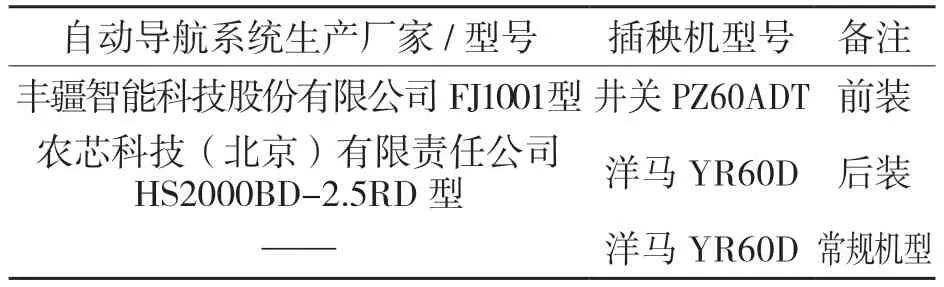
表1 試驗機具基本情況表Tab.1 Basic information of test machines
2.2 試驗前基本情況測定
本次試驗時間2021 年6 月16~17 日,試驗地點蘇州市吳中區臨湖鎮,3 款機具所對應試驗田塊的基本情況如表2 所示,試驗所用秧苗的基本情況如表3 所示。

表2 試驗田塊的基本情況表Tab.2 Basic information of test field

表3 試驗秧苗的基本情況表Tab.3 Basic information of experimental seedlings
測量結果表明,試驗田塊和水稻秧苗的基本情況完全符合本地的栽植農藝要求。
2.3 對比試驗
根據江蘇省DG32/Z 011-2020《智能控制半自動高速插秧機》[11]專項鑒定大綱和NY/T 3334-2018《農業機械—自動導航輔助駕駛系統質量評價技術規范》[12]的試驗方法和檢測指標,對3 款機具開展田間作業試驗研究,圍繞行駛性能、插秧作業性能和作業效率3 項指標進行對比分析研究。3 款機具同時在試驗地塊進行插秧作業,豐疆前裝無人駕駛高速插秧機和農芯后裝無人駕駛高速插秧機均采用一人擺秧、無人駕駛、自主規劃路徑作業方式,常規高速插秧機采用一人駕駛、一人擺秧常規作業方式。試驗作業條件按照蘇州地區水稻栽種要求,株距選擇12 cm,栽植深度固定在最小值。3 款機具栽植效果如圖2 所示。

圖2 3 款試驗機具的實際作業圖Fig.2 Actual operation diagram of three test machines
3 試驗結果與分析
3.1 行駛性能分析
3 款試驗機具在試驗田塊中以相同的速度進行往返作業3 次,將平行于插秧機預設作業軌跡的直線作為基準線,在基準線上以0.5 m 為等距離連續取50 個點作為軌跡記錄點,分別測量行程軌跡1 上Ai點至基準線的距離xi,以及行程軌跡2 上Bi點至Ai點距離hi、行程軌跡3 上Ci點至Bi距離mi,如圖3 所示。
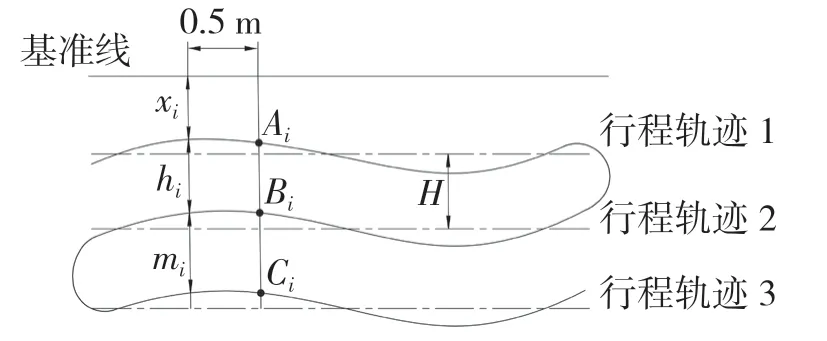
圖3 插秧機行駛軌跡示意圖Fig.3 Schematic diagram of driving track of transplanter
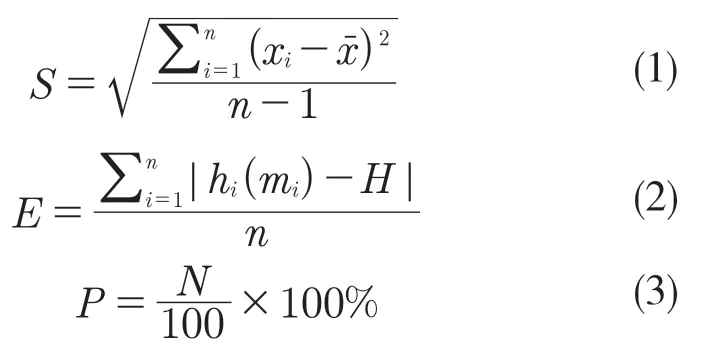
式(1)—式(3)為3 款機具直線精度、作業行間距偏差及合格率計算公式。結果如表4、圖4、圖5 所示。

表4 直線精度和作業行間距偏差表Tab.4 Data sheet of straight line accuracy and operation line accuracy
從表4、圖4 和圖5 可以看出,豐疆前裝、農芯后裝無人駕駛高速插秧機的直線精度分別為2.95,2.83 cm,人工駕駛常規插秧機直線精度為8.50 cm;豐疆前裝、農芯后裝無人駕駛高速插秧機第2 行行間距偏差分別為0.14~19.38 cm和0.27~20.63 cm,第3 行行間距偏差分別為0.05~12.37 cm 和0.13~10.46 cm,而人工駕駛常規插秧機第2 行、第3 行行間距偏差分別為8.28~33.24 cm 和1.36~20.24 cm。相較于與人工駕駛常規高速插秧機,無人駕駛高速插秧機具有更高的直線精度和更小的行距間平均偏差,且偏差變化幅度不大,行駛穩定性較高。

圖4 3 款試驗機具直線精度偏差圖Fig.4 Straight line accuracy deviation diagram of three test machines
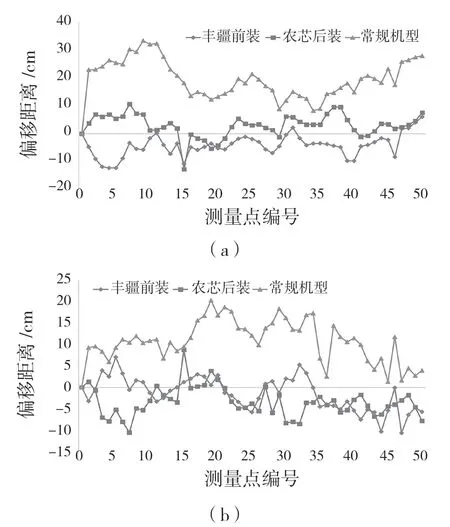
圖5 3 款試驗機具作業行間距偏差圖Fig.5 Deviation diagram of operation line accuracy of three test machines
根據《智能控制半自動高速插秧機》專項鑒定大綱,要求直線精度和作業行間距平均偏差在±5 cm 以內,作業行間距偏差合格率≥90%以上為合格。豐疆前裝和農芯后裝無人駕駛高速插秧機的直線精度,第2 行、第3 行作業行間距平均偏差均小于5 cm,符合大綱要求,但作業行間距偏差合格率<90%,不符合大綱要求,說明水田的實際作業環境對加裝自動駕駛系統的插秧機行駛穩定性有著一定的影響,但相較于人工駕駛插秧機,自動駕駛系統在直線精度和行駛穩定性方面具有明顯的優勢。
3.2 插秧作業性能分析
在每個田塊交叉選取3 個測區,每個測區取50 穴(共150 穴),分別測定每穴的插值株數、傷秧株數、漂秧株數、漏插株數;在3 個測區附近各連續選擇10 穴秧苗,測定插秧深度,并計算出相應的相對均勻度合格率、傷秧率、漂秧率、漏插率和栽植深度合格率5 項指標,如表5 所示。
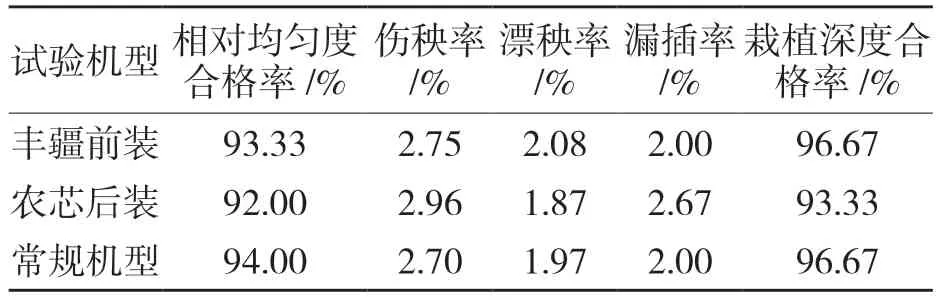
表5 3 款試驗機具插秧作業情況數據表Tab.5 Data sheet of transplanting operation of three test machines
對照《智能控制半自動高速插秧機》專項鑒定大綱要求:相對均勻度合格率≥85%,傷秧率≤4%,漂秧率≤3%,漏插率≤5%,栽植深度合格率≥90%。從表5 可見,3 款試驗機具都符合插秧作業的栽植要求,且差距不大,前裝或后裝自動駕駛系統并不會影響插秧機原有的栽植性能。
3.3 經濟效益分析
本文記錄了3 款試驗機具在大田實際插秧作業的時間,計算出相應的作業效率。同時,假設插秧機一天作業8 h,駕駛員和擺秧人員每天勞務費均為400 元,計算出3 款試驗機具每公頃作業人工成本,如表6 所示。
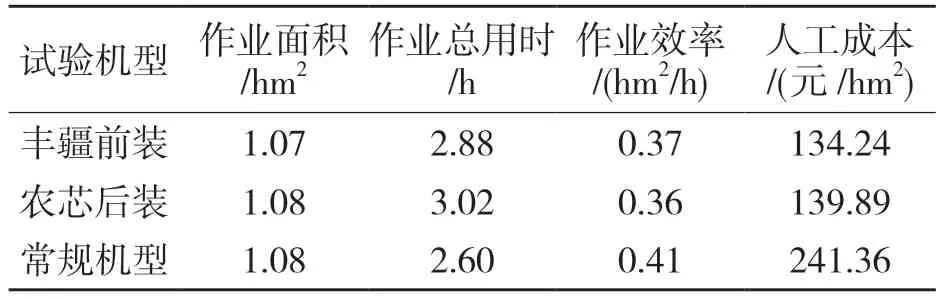
表6 3 款機具作業效率、作業成本情況表Tab.6 Operating efficiency and operating cost of three machines
表6 可以看出,常規高速插秧機每小時作業0.41 hm2,每公頃作業人工成本241.36 元,而農芯后裝、豐疆前裝無人駕駛高速插秧機每小時作業分別為0.36,0.37 hm2,每公頃作業人工成本分別為139.89 元和134.24 元。從數據上看,無人駕駛高速插秧機的作業效率雖然低于人工駕駛常規高速插秧機,但無人駕駛可省下插秧機駕駛員的人工成本,使每公頃作業人工成本遠低于常規高速插秧機,具有較好經濟效益。
4 結論
(1)高速插秧機在加裝導航駕駛系統之后,并不會影響原有的插秧功能,相反大幅提高插秧直線精度、作業行間距平均偏差,改善水稻透光性、通風性,同時便于后續開展機械化水稻田間管理作業。
(2)加裝導航駕駛系統的插秧機作業速度雖然相較人工駕駛偏慢,但可以省去駕駛員的人工作業成本,降低單位面積作業人工成本,具有很好經濟效益。
(3)加裝導航駕駛系統的插秧機在使用前需要根據插秧機自身的尺寸來調節參數設置,對機手素質提出了更高的要求。另外,在試驗過程中,無人駕駛高速插秧機偶爾會出現信號干擾、規劃路徑失敗等問題,需要進一步提高導航駕駛系統的可靠性,加強對從業人員專業化培訓。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
