基于Matlab道路線檢測系統的研究
2022-10-31 04:01:28靳鑫黃經校胡洪
電子制作 2022年18期
靳鑫,黃經校,胡洪
(電子科技大學成都學院 信息與通信工程系,四川成都,611731)
0 引言
隨著現代交通技術越來越多,人們可以利用的交通工具數量不斷增加,可隨之而來的還包括交通事故,它嚴重影響到了人們的生命安全,因此,交通安全的問題不容小覷。我們都知道火車有鐵軌,飛機有地面跑道,而汽車也有地面跑道。那么我們該如何通過檢測車道線來降低風險是重中之重,對于道路檢測的研究不僅是車輛可控制因素的核心問題,而且它有著發展快、技術多、投資多的特點。因此,對地面的道路線識別研究具有重要意義。
目前,我國針對道路線識別系統研究的技術有很多,例如:灰度閾值分割法、邊緣檢測法和區域生長跟蹤法以及基于分水嶺算法的分割方法等。對于道路線檢測系統研究的重要性不言而喻,本文主要基于三種方法對道路線進行檢測并對比,得到檢測道路線的最佳算法。
1 道路線檢測原理及GUI界面
1.1 otsu閾值分割+hough法變換的原理
otsu閾值分割法的基本原理是把圖像按照灰度比分為2個比例,使這兩個比例的圖像灰度值之間的對比更加明顯,而每個比例圖像之間的灰度差異最小。其次是通過方差計算得到一個相對合適的灰度級別來劃分兩個區域。
對圖像I(x,y),前景和背景的分割閾值記作T,前景像素點數占整幅圖像的比例為ω0,其平均灰度μ0;背景像素點數占整幅圖像的比例為ω1,其平均灰度μ1;圖像的總平均灰度記為μ=ω0μ0+ω1μ1;類間方差記為g。
假設:背景較暗,且圖像的大小為M×N,圖像中,像素灰度值小于閾值T的像素個數記作N0,像素灰度值大于閾值T的像素個數記作N1,則有:
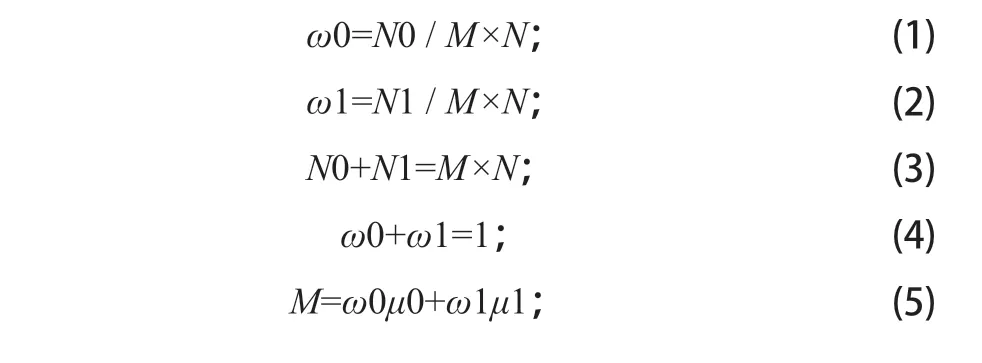

將式(5)代入式(6),得到等價公式:

這就是類間方差,采用遍歷的方法得到使類間方差g最大的閾值T,即為所求。
hough變換的基本原理在于,xy坐標空間經過固定一定I(x,y)的多條直線參數可以映射到由這些直線參數所組成的參數空間的一條曲線。假設將所有直線在二維圖像中的像素點映射到參數空間中,并對參數進行疊加,就可以形成多條曲線。在實際應用中,首先要進行參數空間初始化,也就是矩陣像素點置0;其次要記錄所有經過不為0像素點的直線參數,在參數空間中加1,形成一個累加器;最后分析參數矩陣,獲取多個峰值進行檢測。
1.2 直方圖閾值分割+hough變換法的原理
直方圖閾值分割+hough變換法的基本原理是把先圖像的灰度分成不同的等級,然后確定灰度和門閾值。其次,對圖像的閾值化處理是一種階梯函數,它的功能是先指定一個閾值,如果圖像中的某個像素大于該閾值,則像素的灰度值為255,否則為0。最后根據灰度直方圖的分布情況,觀察直方圖的波峰和波谷,選取谷底的值為最佳閾值,利用最佳閾值對圖像閾值化處理,把目標和背景分離,達到檢測直線的效果。Hough變換的基本原理和前文中介紹的相同。
1.3 區域生長跟蹤法的原理
區域生長跟蹤法的基本原理是先把相似性質的像素點合并在一起,然后選取一個種子點,確定該種子點在生長過程中將相鄰的像素全部覆蓋,最后令種子點停止生長。其中確定了種子點的起點后,將它周圍相鄰的像素點和種子點進行對比,相似的種子點保持向外生長的狀態,直到沒有滿足條件的像素點被包括進來為止。
在種子的選取中,大部分情況下都選取人工交互的方法實現,其他方式比如尋找物體并提取內部點,都要找到特征點作為種子點;在生長過程中,相鄰像素要包括灰度值差值之間的對比、彩色圖像的顏色、梯度特征等,根據它的特征,利用區域生長法進行生長。
通過對以上三種方法原理的介紹,otsu閾值分割+hough變換法和直方圖閾值分割+hough變換法都是在選取最佳閾值的基礎上對二值圖像進行hough變換,其中hough變換首先需要進行邊緣檢測,其次要確定待測量直線段的最小長度和線段間距離,最后將符合條件的直線進行標記,在一定程度上增大了道路線檢測的難度。而區域生長跟蹤法只需要利用種子點搜索二值圖像中物體的外邊界,用不同顏色標記不同性質的區域,最后在圖像上疊畫每一個線條的邊界,該檢測法的原理相比另外兩種方法的原理更加簡單,實際應用性更強。
1.4 GUI人機交互界面設置
MATLAB GUI為圖形用戶接口(Graphical User Interface,簡稱GUI),指采用圖形方式顯示的計算機操作用戶界面。GUI只需要通過菜單欄選擇需要的圖形對象來操作設置界面即可。正是因為GUI為用戶提供了極大的方便,所以備受青睞。
本系統所設計的人機交互GUI界面如圖1所示。
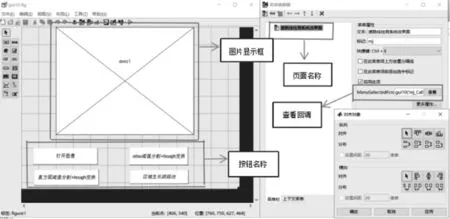
圖1 道路線識別系統的GUI界面
2 道路線檢測系統設計
本文基于道路線檢測原理,利用不同算法對進行道路線檢測。包括otsu閾值分割+hough變換法、直方圖閾值分割+hough變換法、區域跟蹤生長法,并結合GUI人機交互界面,對道路線檢測不同方法的圖像進行結果展示,設計開發道路線檢測系統。
由于圖像采集時存在一些不確定因素的影響,比如彩色圖像光線過亮、圖像模糊等情況,都會影響道路線檢測的正確率,因此道路線檢測在實際檢測過程中仍存在一定困難。本文所利用的otsu閾值分割+hough變換法和直方圖閾值分割+hough變換法,都要先對采集的圖像進行閾值分割得到二值圖像后,再分別進行邊緣檢測和hough變換,而區域生長跟蹤法先要對采集的圖像二值化,其次下種子點搜索物體外邊界,最后用不同顏色標記不同區域。道路線檢測系統總體設計方案如圖2所示。
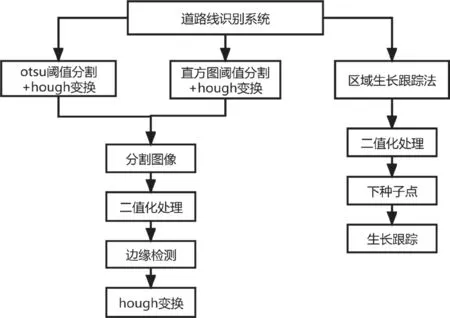
圖2 系統總體設計方案
2.1 otsu閾值分割+hough變換法設計流程
利用otsu閾值分割+hough變換法進行道路線檢測的流程包括:讀取圖像、灰度處理、otsu閾值分割、邊緣檢測、hough變換提取直線、道路線檢測。如圖3所示。
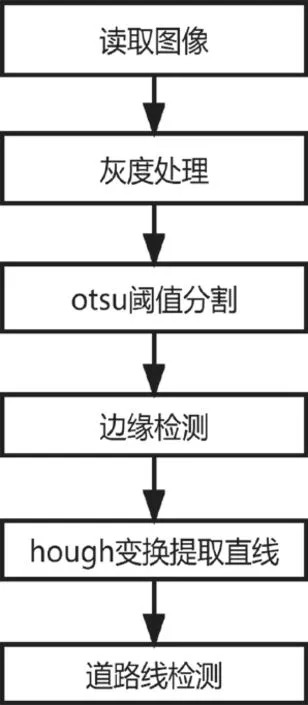
圖3 otsu閾值分割+hough 變換法處理流程
2.2 直方圖閾值分割+hough變換法設計流程
利用直方圖閾值分割+hough變換法進行道路線檢測的流程包括:讀取圖像、灰度處理、直方圖閾值分割、邊緣檢測、hough變換提取直線、道路線檢測。如圖4所示。
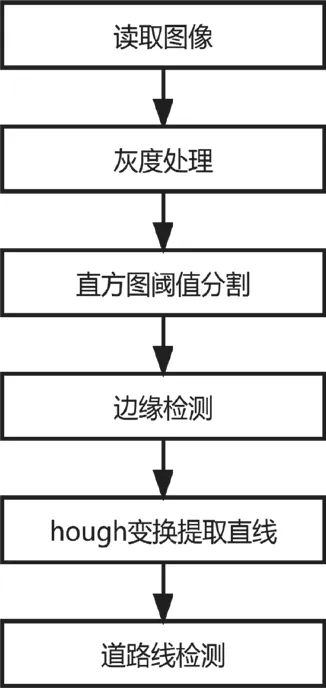
圖4 直方圖閾值分割+hough變換法處理流程
2.3 區域生長跟蹤法設計流程
利用區域生長跟蹤法進行道路線檢測流程包括:讀取圖像、二值化處理、下種子點、區域生長跟蹤、道路線檢測。如圖5所示。
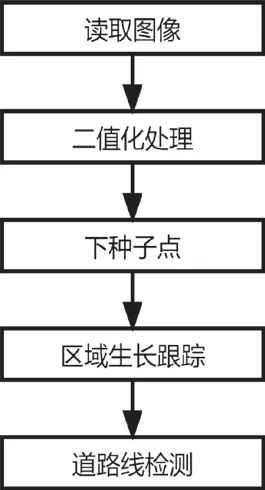
圖5 區域生長跟蹤法處理流程
3 道路線檢測系統的結果與分析
分別應用otsu閾值分割+hough變換法、直方圖閾值分割+hough變換法、區域生長跟蹤法對道路線進行檢測。基于實際道路圖像,驗證三種檢測法的有效性,并進行對比分析。
圖6 所示的圖像一和圖像二均是MATLAB GUI界面系統實現圖像效果,點擊“打開圖像”按鈕,則出現待檢測道路線的圖像,同理,點擊其他按鈕都會在按鈕上方顯示該按鈕所對應的功能圖像。下面將點擊不同按鈕對道路線檢測進行結果顯示。
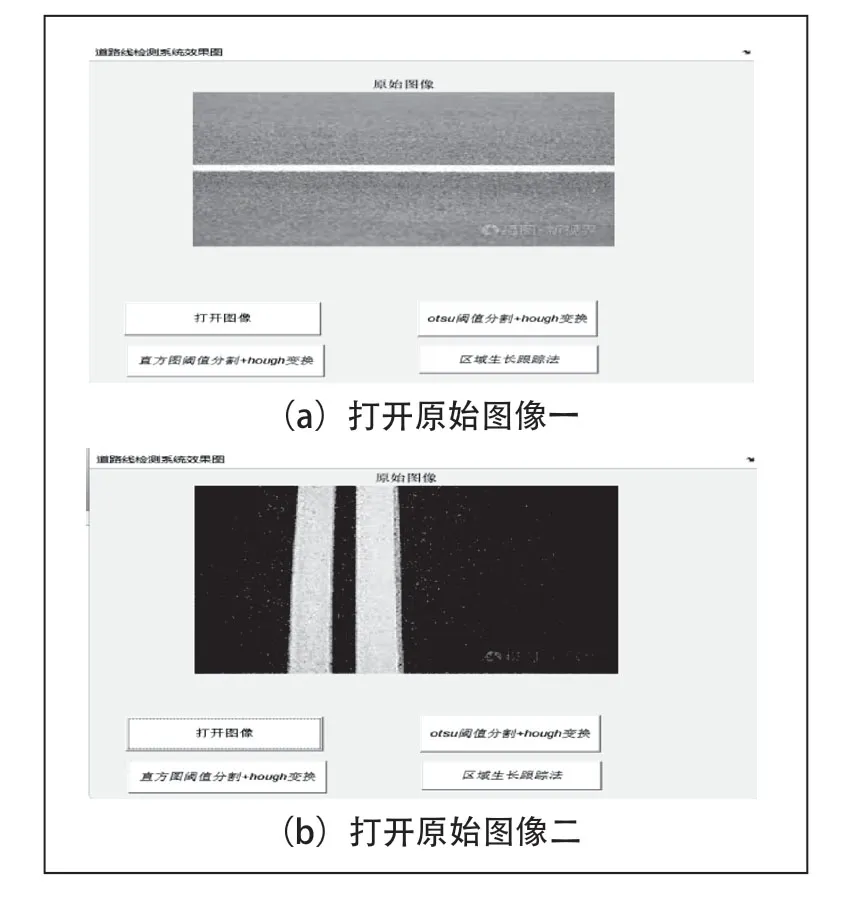
圖6
圖7 (a)和7(b)使用hough變換時,對hough矩陣進行閾值檢測,閾值設置為矩陣最大值的0.3,將大于閾值的點作為備選點。取hough矩陣中備選點中的極大值點為峰值點,這些峰值點對應的參數空間坐標即所檢測直線的參數。峰值點個數設置為n個,即提取n條目標直線。參數空間分別選取矩陣第二列全部坐標的角度值以及矩陣第一列的所有行。且圖7(b)根據灰度直方圖選取直方圖谷底的值200為最佳閾值。線條繪圖的參數設置如下:線段合并的閾值設置為300,檢測直線段的最小長度的閾值設置為4,標記道路線的線寬設置為3。
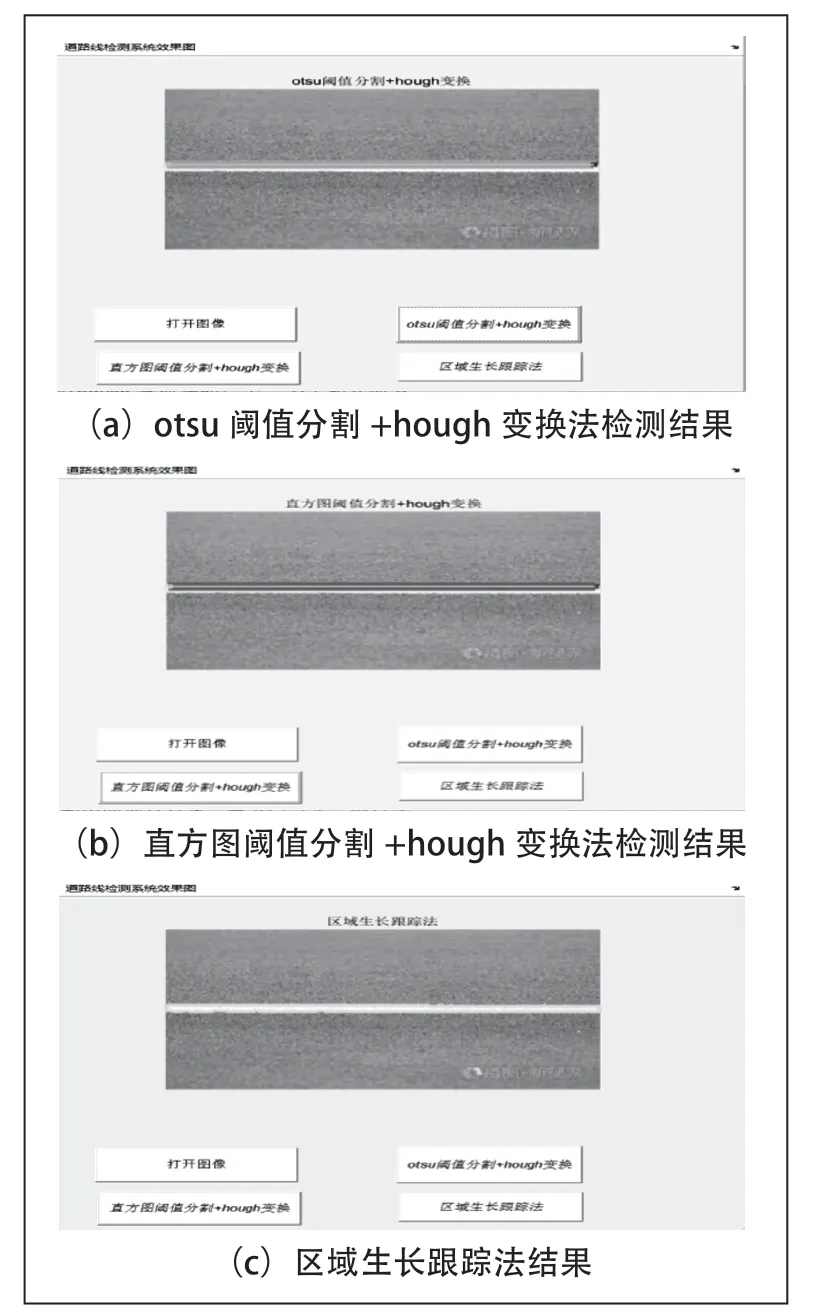
圖7 圖像一的應用結果
圖7(c)使用區域生長跟蹤法設置參數時,只需要將線條繪圖的參數即線寬設置為3,其余部分均利用種子點用不同顏色標記不同性質區域的性質來完成。
從圖7可以看出,雖然三種方法在圖像一所示的道路上都得到了初步的檢測效果,但和otsu閾值分割+hough變換法(圖7a)和直方圖閾值分割+hough變換法(圖7b)相比,區域生長跟蹤法(圖7c)得到了更完整的道路線檢測結果。
圖8 (a)和8(b)使用hough變換時的參數同圖7的設置相同。而線條繪圖的參數設置如下:將線段合并的閾值設置為500,檢測直線段的最小長度的閾值設置為160,標記道路線的線寬設置為3。
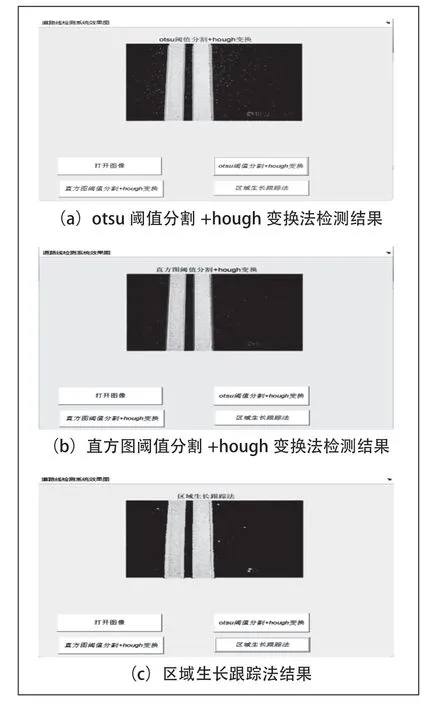
圖8 圖像二的應用結果
圖8(c)使用區域生長跟蹤法設置參數時,這里將線條繪圖的參數即線寬設置為2,其余部分也均利用種子點用不同顏色標記不同性質區域的性質來完成。
從圖8可以看出,otsu閾值分割+hough變換法(圖8a)和直方圖閾值分割+hough變換法(圖8b)雖然檢測除了大部分道路線,但圖像邊緣仍存在一定不足。而區域生長跟蹤法(圖8c)的檢測結果比另外兩種檢測法的圖像結果顯示更加完整。
另外,在實際應用中,基于hough變換的方法,線段合并的閾值和檢測直線段的最小長度的閾值如果設置不得當,檢測到的道路線就會缺失。而線寬如果設置過大,道路線就被全覆蓋,不能很好地將道路線邊界和中間部分分離;若設置過小,則只能檢測道路線邊界部分,中間白色道路部分不清晰,達不到理想的效果。而區域生長跟蹤法對每一條道路線都用黃色的線包圍,道路線邊界和中間部分色彩差異明顯,且背景與目標對比明顯,同時該檢測法無需進行hough變換的參數設置便能夠完成道路線的檢測,很大程度上降低了操作難度,利用該檢測法準確率較高。
以上兩個實驗應用成功驗證了區域生長跟蹤法的效果最佳以及在實際應用中的可行性。
4 結束語
本文經過圖像采集后,首先通過matlab實現了基于灰度圖像的道路線檢測,同時研究其原理進一步獲得檢測車道線的方法,其次設置了GUI人機交互界面對圖像進行處理,分別利用otsu閾值分割+hough變換法、直方圖閾值分割+hough變換法以及區域生長跟蹤法完成道路線的檢測,最終實驗結果驗證了區域生長跟蹤法在道路線檢測系統中應用的可行性和優越性。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
小讀者(2021年2期)2021-03-29 05:03:48
華人時刊(2019年13期)2019-11-17 14:59:54
文苑(2018年22期)2018-11-19 02:54:14
紅領巾·萌芽(2016年1期)2016-09-10 07:22:44
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
電測與儀表(2015年5期)2015-04-09 11:30:52