基于改進(jìn)霍夫變換的車道線檢測算法實(shí)現(xiàn)
2022-10-31 08:40:20王宇瑞李炎亮郭雨婷江奎
農(nóng)業(yè)裝備與車輛工程 2022年5期
王宇瑞,李炎亮,郭雨婷,江奎
(201620 上海市 上海工程技術(shù)大學(xué) 機(jī)械與汽車工程學(xué)院)
0 引言
目前,智能駕駛領(lǐng)域已經(jīng)成為各大科研院所及高校的熱門研究課題。針對光照條件變化、車道線磨損等實(shí)時路況,實(shí)時精準(zhǔn)地獲取車道線信息對于實(shí)現(xiàn)智能汽車的自主駕駛起著至關(guān)重要的作用。LIU Bin[1]等人研究認(rèn)為,基于Mask R-CNN 分割不僅能快速檢測車道線,而且在TSD-Max 數(shù)據(jù)集上的檢測精度高達(dá)97.9%;徐棒棒[2]等人基于深度學(xué)習(xí)的方法,通過搭建LaneNet 框架,同時利用開源數(shù)據(jù)集訓(xùn)練算法后,實(shí)現(xiàn)車道線檢測;梁樂穎[3]研究了基于以目標(biāo)識別為主的R-FCN 框架和以圖片分類為主的卷積神經(jīng)網(wǎng)絡(luò)算法;蔡英鳳[4]等人提出基于實(shí)例分割和透視變換相結(jié)合的多車道檢測算法,車道線識別精度提高到91.4%;丁海濤[5]等人提出一種基于密集分割網(wǎng)絡(luò)的車道線檢測方法,通過構(gòu)建密集分割網(wǎng)絡(luò)獲取車道線的實(shí)例特征,同時引入Meanshift 聚類算法,消除圖像噪聲的干擾。
車道線的檢測算法主要分為基于特征和基于模型兩類[6-8]。基于特征的算法一般適用于高速主干道車道線的識別,城市道路受到噪聲的影響更嚴(yán)重一些[9]。因此,本文采用基于模型特征,在前人研究的基礎(chǔ)上,提出一種基于改進(jìn)霍夫變換的車道線檢測算法。
1 視覺圖像的預(yù)處理
圖像預(yù)處理目的是將視覺采集的圖片經(jīng)過處理凸顯特征,弱化干擾噪聲。
1.1 灰度化處理
采用加權(quán)平均法,公式如下:

式中:wR,wG,wB——RGB 分量的權(quán)值,根據(jù)多次實(shí)驗(yàn),最終確定:wR=0.3,wG=0.59,wB=0.11 。
處理對比分析如圖1 所示。由實(shí)驗(yàn)結(jié)果分析可以得出:加權(quán)平均法處理后效果更加清晰。

圖1 不同方法處理對比分析圖Fig.1 Comparative analysis of different method processing
1.2 圖像增強(qiáng)處理
圖像增強(qiáng)處理分類如圖2 所示[10-12],本文采用中值濾波法。
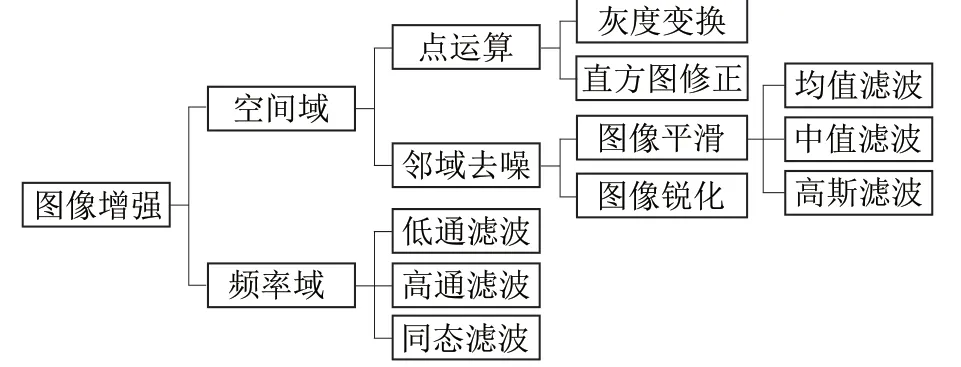
圖2 圖像增強(qiáng)方法分類Fig.2 Classification of image enhancement methods
中值濾波是非線性濾波算法,運(yùn)用邏輯運(yùn)算既可以去噪,也可以保留邊界信息。用中值來替代該點(diǎn)濾波前的灰度值,公式如下:

式中:P(i,j)——處理后圖像在點(diǎn)(i,j)的灰度值;f(i,j)——原始灰度化圖像。
通過添加0.05 的椒鹽噪聲來模仿現(xiàn)實(shí)道路中的噪聲,分別對3 種濾波算法進(jìn)行仿真實(shí)驗(yàn),觀測3 種濾波去噪能力。處理結(jié)果如圖3 所示。

圖3 圖像增強(qiáng)算法處理比較Fig.3 Image enhancement algorithm processing comparison
由實(shí)驗(yàn)結(jié)果分析,采用中值濾波算法可以達(dá)到去噪和保護(hù)邊緣信息的效果。
1.3 二值化處理
二值化處理需設(shè)定某臨界灰度值作為閾值[13],公式為:

式中:g(x,y)——二值化信息;f(x,y)——灰度值圖像;T——閾值。
二值化方法處理結(jié)果對比分析如圖4 所示。
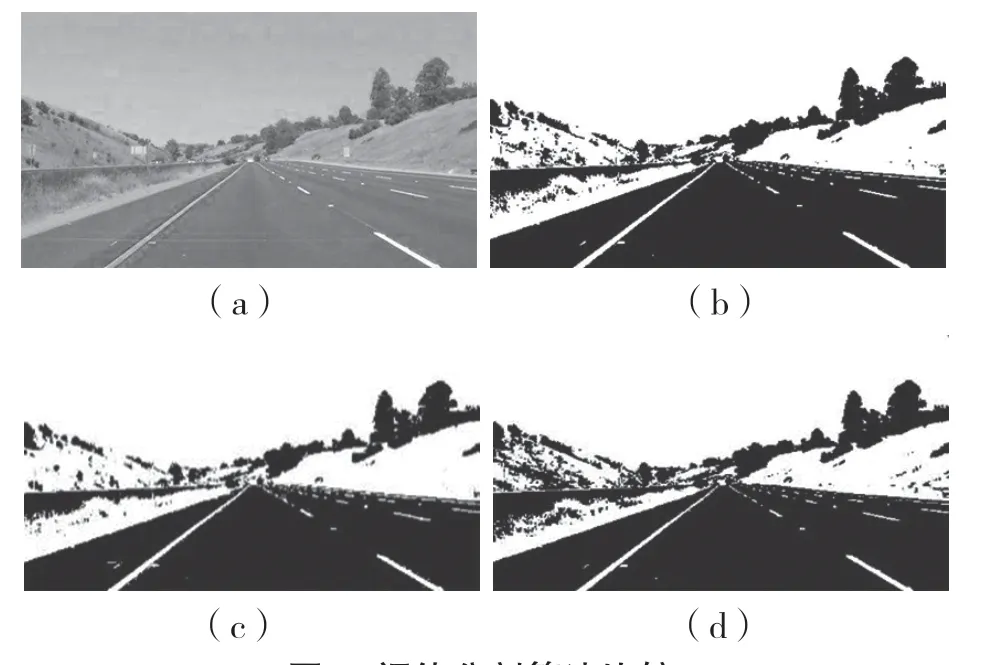
圖4 閾值分割算法比較Fig.4 Comparison of threshold segmentation algorithms
由實(shí)驗(yàn)結(jié)果分析,由OTSU 算法得到的二值化圖像車道線邊緣更為平滑,能夠清晰地識別出車道線并可以與無關(guān)背景信息區(qū)別出來,且該算法計算簡單、穩(wěn)定、自適應(yīng)性強(qiáng)。
2 車道線檢測算法
2.1 邊緣檢測
邊緣檢測具體步驟如圖5 所示。

圖5 邊緣檢測流程圖Fig.5 Edge detection flowchart
本文采用Canny 算子進(jìn)行邊緣檢測。對比分析如圖6 所示。

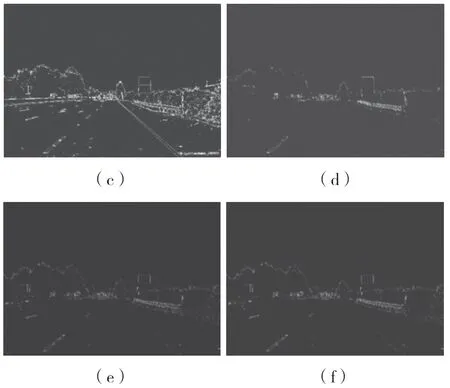
圖6 邊緣檢測算法對比分析圖Fig.6 Comparative analysis of edge detection algorithms
仿真結(jié)果對比分析可以得出:Prewitt 算子邊緣定位精度較低;Sobel 算子輪廓提取效果較差;經(jīng)過Log 算子處理后的邊緣精度和去噪效果兩者無法兼得。基于Canny 邊緣檢測處理,可以獲得較好的信息提取。
2.2 霍夫變換
Hough 變換的基本原理是根據(jù)極坐標(biāo)系和直角坐標(biāo)系的點(diǎn)-線對偶性,將圖像空間中的線轉(zhuǎn)化成參數(shù)空間中的點(diǎn),再結(jié)合表決方式尋找峰值,通過估計參數(shù)解決檢測問題。
2.2.1 利用Hough 變換檢測直線
首先通過邊緣檢測,找出圖像中所有的邊緣點(diǎn)。將經(jīng)過某個交點(diǎn)(ρ,θ)的曲線最多的點(diǎn)映射回原圖像空間,可能表示一條直線,推導(dǎo)可得:

由已知點(diǎn)(ρ,θ),可以計算出直角坐標(biāo)系下的直線方程,從而求得所要檢測的車道線。
Hough 變換的具體步驟:
(1)初始化ρ-θ空間,此時該參數(shù)表示的直線上的像素點(diǎn)的個數(shù)N(ρ,θ)=0 。
(2)搜尋圖像中所有的邊緣像素點(diǎn)信息,根據(jù)式(4)計算得出參數(shù)空間中使其成立的極徑ρ,θ∈(0,180),N(ρ,θ)=N(ρ,θ)+1。
(3)設(shè)置閾值為T,將N(ρ,θ)與T比較,若N(ρ,θ)>T,則可以求得直線的參數(shù)。重復(fù)上述步驟使N(ρ,θ)=0。
2.2.2 Hough 變換直線提取
根據(jù)Hough 調(diào)用函數(shù)(如圖7 所示),可以從圖7 中獲取兩條直線車道線[14]。

圖7 Hough 變換函數(shù)調(diào)用Fig.7 Hough transform function call
檢測結(jié)果如圖8 所示。
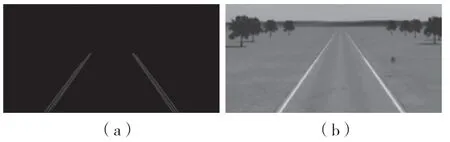
圖8 Hough 變換檢測結(jié)果Fig.8 Hough transform detection results
3 直線擬合
分別用最小二乘法對左右兩車道線進(jìn)行擬合,得到左右兩條車道線的起點(diǎn)和終點(diǎn)坐標(biāo),再根據(jù)端點(diǎn)求出左右車道線的結(jié)果如圖9 所示。
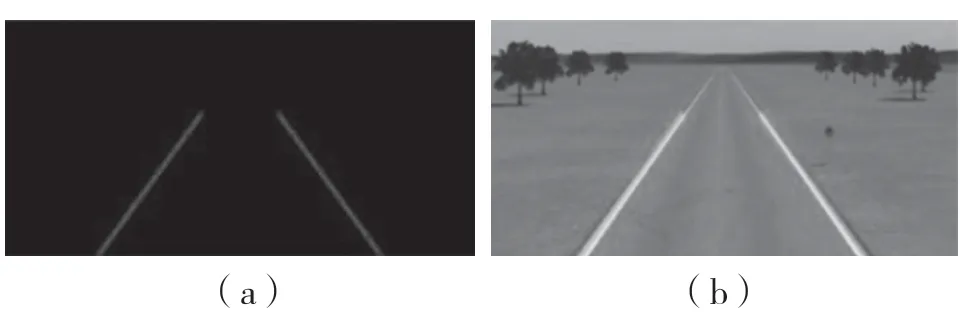
圖9 直線檢測擬合結(jié)果Fig.9 Straight line detection fitting result
通過實(shí)驗(yàn)結(jié)果分析,直線檢測擬合結(jié)果可以映射到原圖中,車道線被清晰識別出來。
4 實(shí)驗(yàn)結(jié)果分析
為驗(yàn)證直線檢測算法的有效性,運(yùn)用實(shí)際道路中的4 種工況在不同的非正常環(huán)境下的道路圖片,檢測效果如圖10 所示。
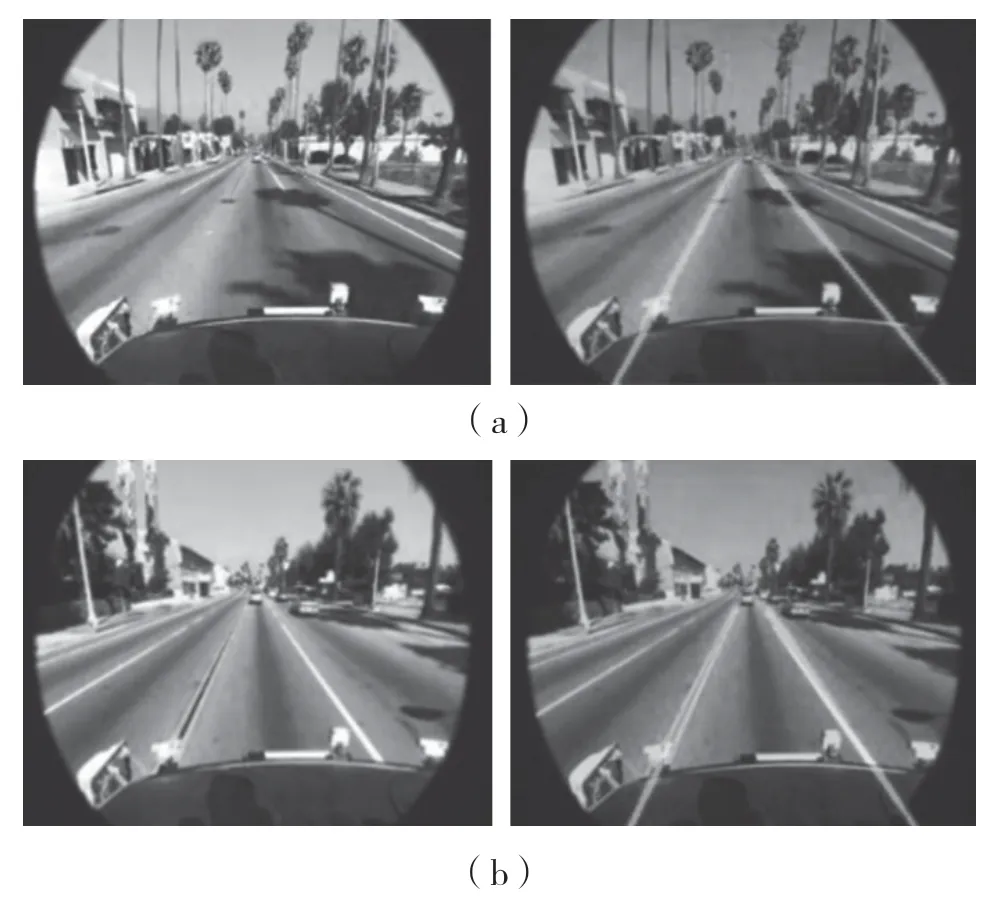
圖10 實(shí)際道路檢測結(jié)果Fig.10 Actual road inspection results
通過實(shí)驗(yàn)結(jié)果分析,在實(shí)際道路中,直接基于邊緣檢測結(jié)合Hough 變換識別結(jié)果對比原圖會出現(xiàn)偏移,因此本文先利用HSV 空間提取黃色像素點(diǎn),接著在灰度空間中提取白色像素點(diǎn),將HSV和灰度空間融合后,并對灰度圖進(jìn)行掩膜處理,處理過程如圖11 所示。
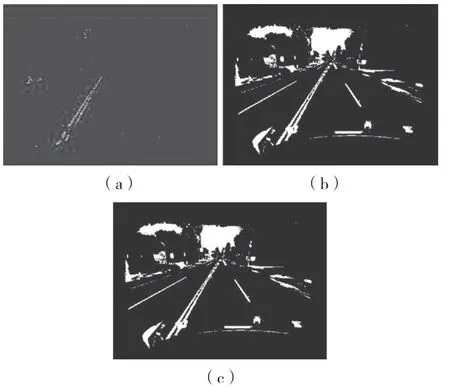
圖11 優(yōu)化改進(jìn)圖Fig.11 Optimization and improvement map
經(jīng)過上述改進(jìn)算法處理后的效果對比如圖12所示。
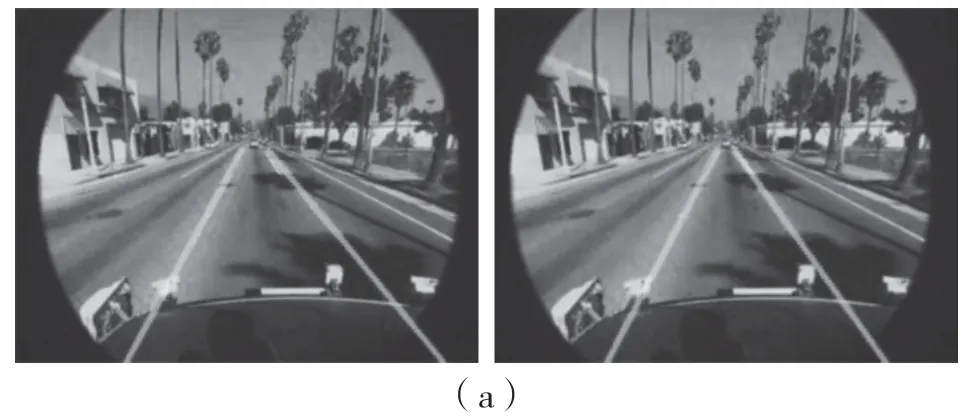
圖12 改進(jìn)方法對比分析圖Fig.12 Comparative analysis of improved methods
通過HSV 和灰度空間融合模型提取車道線顏色特征,經(jīng)過上述處理后,與原算法進(jìn)行對比分析,可以看出基于改進(jìn)的霍夫變換的檢測算法,檢測精度與穩(wěn)定性有了很大的提高。
5 結(jié)論
實(shí)驗(yàn)結(jié)果表明,本文提出的算法在陰影、光線急劇變化和車道線磨損和陰影遮擋等環(huán)境干擾較為敏感的路況下都能夠保證車道線的精確檢測,為智能車輛實(shí)現(xiàn)自適應(yīng)巡航、跟車行駛和車道保持等功能提供了很好的基礎(chǔ)保障。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
