TRIZ 理論在電動輪椅中輪部裝結構優化設計中的應用
2022-10-31 04:06:10劉瑩穎鄧援超湯宇
農業裝備與車輛工程 2022年1期
劉瑩穎,鄧援超,湯宇
(430068 武漢市 湖北省 湖北工業大學)
0 引言
隨著社會主義新時代的到來,科技發展迅速,人們的生活水平也越來越好,人類的平均壽命達到75 歲,老齡化已經成為全球一突出問題[1]。另外,自然災害和某些人為因素導致殘疾人數增多。電動輪椅的出現,很大程度上改善了部分老年人和殘障人士的日常生活,它是適合老年人和下半身殘疾人士使用的體閑代步工具,其設計研發也成為一個重要的課題。
TRIZ 理論是綜合了多學科領域的法則和原理所形成的理論體系,它主要由技術矛盾、物理矛盾、標準解及效應庫等創新工具組成[2]。本文針對目前電動輪椅在運行過程中同步性差、不穩定的問題,首先利用TRIZ 理論定義和描述該問題,并對成型過程中遇到的實際問題進行因果鏈分析,找到根本原因后,運用TRIZ 工具對問題進行求解,得到了多個解決方案模型,最終選取最優方案模型進行驗證[3],電動輪椅在運行過程中同步性差、不穩定的問題得以解決,電動輪椅中輪部裝裝置得以優化。
1 電動輪椅中輪部裝裝置介紹
電動輪椅由前輪部裝、中輪部裝、后輪部裝、坐墊機構、靠背機構和扶手機構等組成,模型如圖1 所示。輪距的伸縮主要靠中輪部裝實現。
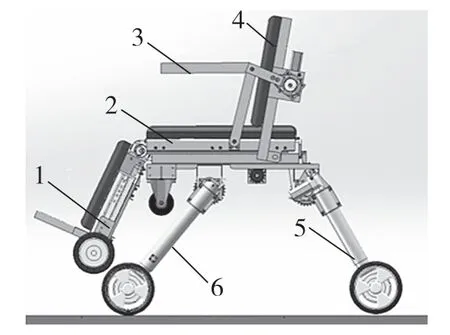
圖1 電動輪椅裝置模型圖Fig.1 Model diagram of electric wheelchair device
本項目的輪椅在正常行駛時必須將中輪輪距變寬,來增加其穩定性。在如廁時,中輪輪距寬度需要較窄,以方便通過衛生間門;在上下樓梯時,中輪輪距寬度需要較寬,以確保輪椅上下樓梯的穩定安全。所以中輪部裝的主要作用是實現輪距的伸縮,從而滿足各種場景對輪距的要求,使電動輪椅安全通過,增加穩定性。其模型圖如圖2 所示,結構簡圖如圖3 所示。
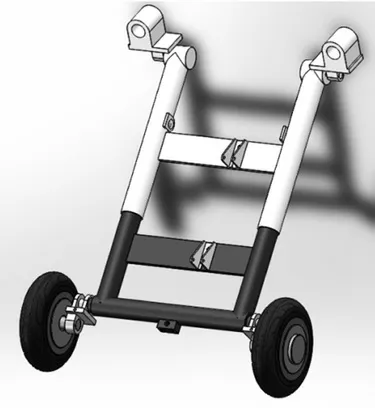
圖2 中輪部裝結構模型圖Fig.2 Structure model of middle wheel assembly
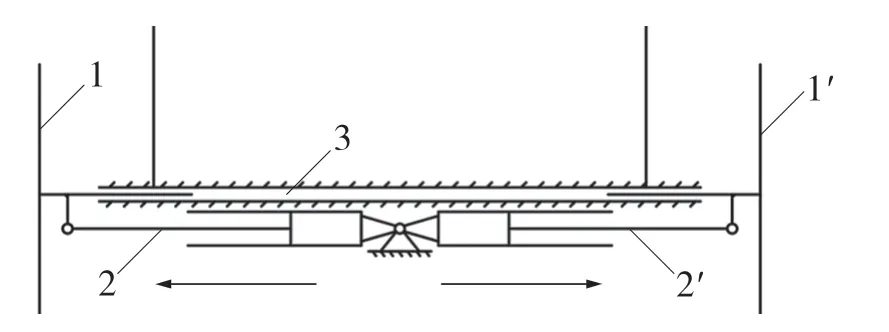
圖3 中輪部裝關鍵機構結構簡圖Fig.3 Structure diagram of key mechanism of middle wheel assembly
該機構為主要由兩個電動推桿組成的四桿機構,工作過程:在左右電動推桿作用下,左右輪安裝座得以伸縮。在左右輪安裝座的帶動下,實現輪距的伸縮,從而滿足不同場景對輪距的要求。
輪椅中輪部裝工作原理是:在左、右輪子安裝座1 及1’的固定支撐下,中輪驅動輪椅前進后退;中間連接軸套3 起導向和支撐作用;輪椅的高度調節由中輪升降桿實現;中輪輪距調節由左推桿2、右推桿2’實現;推桿由中間連接軸套3 固定;控制系統控制左右推桿從而推動左右輪子安裝座1,進而支撐中輪。
2 問題分析
2.1 問題描述
本項目組成員在對本項目樣機進行試驗時發現,電動輪椅在正常行駛和上下樓梯時,如果輪距不夠寬則會造成輪椅行駛不穩定,存在安全隱患;如若在通過衛生間的門時中輪輪距不夠窄,則無法通過;且原始系統在滿足上述條件時采用了過多的動力源,同步性差。
2.2 系統功能組件分析
在建立組件模型之前,首先需要確定技術系統,并根據該技術系統的定義,確定該技術系統的作用對象、技術系統組件、超系統組件[4]。本技術系統的功能是實現中輪輪距的伸縮,所以中輪是技術系統的作用對象。而技術系統的組件為中輪調節系統,分別為中輪升降桿4、中間連接軸套3、左右連接軸5 及5’、左右輪子安裝座1及1’、左右推桿2 及2’。技術系統的超系統為控制系統、中輪支撐桿6、座椅機架。由以上確定的組件,對各組件之間進行作用分析,得到模型示意圖如圖4 所示,組件模型圖如圖5 所示。
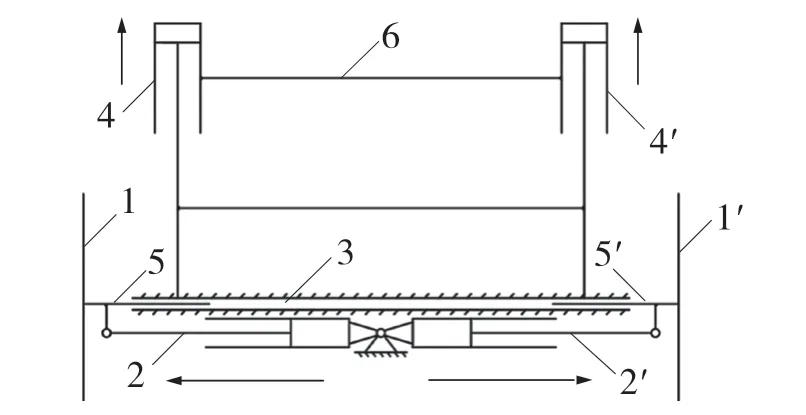
圖4 中輪部裝模型示意圖Fig.4 Schematic diagram of middle wheel assembly model
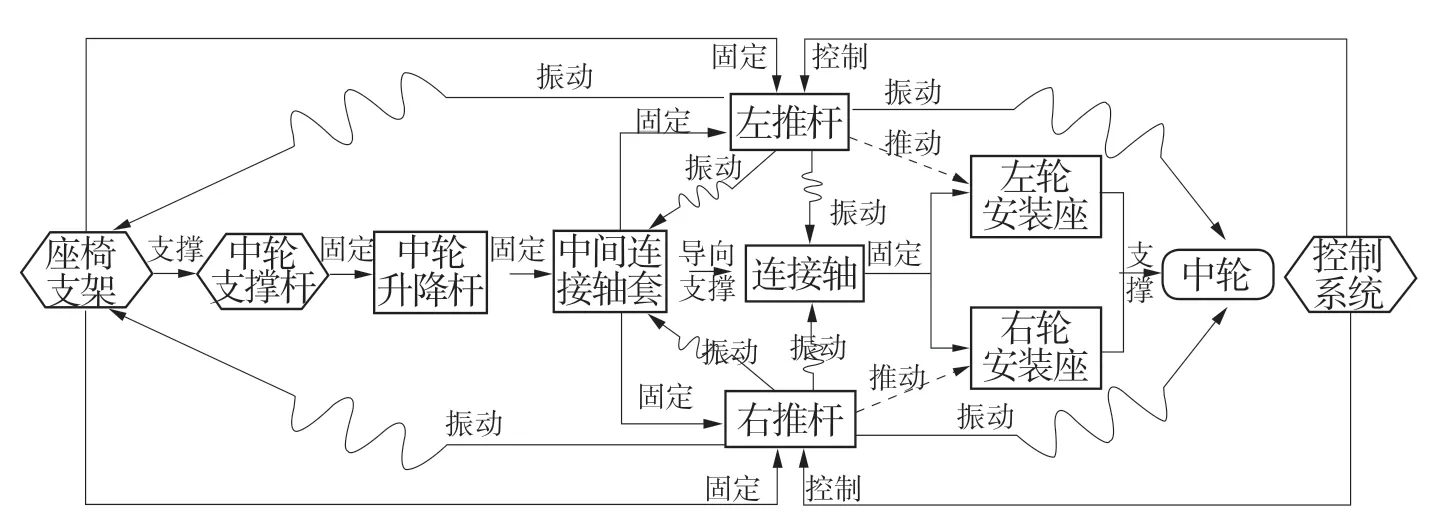
圖5 功能組件模型Fig.5 Functional component model
2.3 因果鏈分析
因果鏈分析是全面識別工程系統的分析工具,可以在功能組件分析的基礎上挖掘出造成該問題的深層原因,建立初始問題和底層問題的邏輯關系,便于尋找更多解決問題的突破口[5]。針對本課題的問題進行因果鏈分析,如圖6 所示。
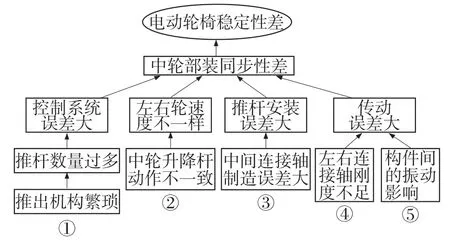
圖6 因果鏈分析Fig.6 Causal chain analysis
由因果鏈分析得到影響電動輪椅穩定性差的5 個根本原因,分別用圖5 中的5 個數字標出。在試驗過程中發現,由于根原因①,即推出機構繁瑣,導致中輪部裝的同步性較差,所以需要對其進行優化設計,減少對輪椅穩定性的影響。針對根原因②,一般日常生活輪椅所需要升降的場合,中輪升降桿能較好實現且相對穩定,極少數惡劣環境,電動推桿動作不一致,導致左右輪速不一樣,無法達到穩定性要求。針對根原因③,觀察中輪部裝實現輪距伸縮時,由于中間連接軸的制造誤差,使左右推桿安裝誤差大,對輪椅穩定性有一定影響。針對根原因④,輪椅能較好地實現輪距的伸縮,一些惡劣條件下,左右連接軸剛度不足使其達不到穩定性要求,存在一定的安全隱患。針對根原因⑤,構件間振動大,在實現輪距伸縮時的傳動誤差也較大,從而導致中輪部裝穩定性較差,整個電動輪椅的安全穩定性較差,仍有改善空間。所以根原因①是電動輪椅穩定性差的關鍵原因,根原因⑤也可以進行優化改進。
3 TRIZ 工具對問題求解
3.1 問題1:中輪部裝同步性差
3.1.1 物理矛盾解決問題
物理矛盾是指對系統的同一個參數有不同的要求。運用物理矛盾解決問題的主要步驟是:第1 步,首先利用TRIZ 理論相關工具分析出待解決問題的根本原因,然后定義物理矛盾[6],當對系統中同一參數提出互為相反的要求時,就說存在物理矛盾;第2 步,描述矛盾的參數或者相反的要求;最后一步,找到相應的分離原理,初步試著解決問題,即利用各分離原理推薦的發明原理來構建解決方案模型,最終轉換為實際方案[3]。針對本文電動輪椅推出機構不合理這一問題,解決流程如下:
針對根原因①中輪部裝的推出機構繁瑣,從而導致同步性差這一問題,發現輪距的伸縮是依靠兩個電動推桿的作用,但是電動推桿的數量多就會造成中輪部裝的結構繁瑣,很難達到穩定性的要求,存在安全隱患,所以電動推桿的數量需要少,這樣可以較好地保證其同步性,使電動輪椅行駛更加平穩,同時也可以降低成本。但是如果只有一個推桿作用,無法保證其推力可以實現兩個輪子在桿的作用下伸縮,這就又需要電動推桿的數量多。這樣就形成了一對物理矛盾,即電動推桿的數量需要少,因為可以使桿件之間的運動同步性提升,使輪距伸縮更加平穩;但是又需要電動推桿數量多,因為在不增加成本的前提下,無法保證一個推桿的推力可以達到預期要求。
針對該物理矛盾適用“基于條件分離”來解決。基于條件的分離是將矛盾雙方在不同條件下分離開來,以獲得問題的解決。針對電動輪椅中輪部裝同步性差這一問題,可以在一個電動推桿的條件下,重新設計一組桿件,使一個推桿的推力能達到預期要求,從而實現輪距的收縮。選擇“條件分離”所推薦的發明原理6 多樣性原理得到方案1,即在原始方案上去掉一個推桿,只用一個推桿水平推動桿6,從而依次帶動桿5、4、3、2,從而實現輪距是伸縮。帶電動推桿式八桿機構示意圖如圖7 所示。
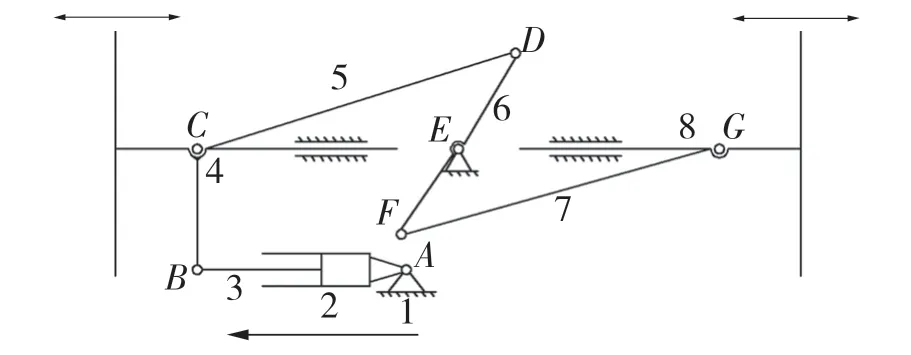
圖7 帶電動推桿式八桿機構示意圖Fig.7 Schematic diagram of eight-bar mechanism with electric push rod
3.1.2 技術矛盾解決問題
矛盾矩陣是用39 個通用工程特性參數組成的39×39 正方矩陣。利用技術矛盾解決問題的主要步驟是:首先分析問題,找出存在的技術矛盾。然后針對具體問題確認一對或者多對技術矛盾,并將矛盾的雙方轉換成TRIZ 理論中提供的39 個通用工程特性參數,最后按照矛盾通用的工程參數編號i和j,在矛盾矩陣中找到對應的發明原理,再將已找到的發明原理結合對應的專業知識,得到初步解決方案。針對本課題,具體步驟如下。
針對中輪部同步性差這一問題,若要讓中輪部裝同步性增強,首先想到的就是減少電動推桿的數量。讓一個電動推桿作用,實現輪距的伸縮,避免了中輪部裝桿件運動的不協調,進而提高了電動輪椅行駛的穩定性,減少事故發生。但減少電動推桿的數量必然會單個推桿所承受的力增大。因此可以將推桿的數量和其所承受的力作為一對技術矛盾。得到技術矛盾后,抽象對應到39個通用工程參數,得到待改善的參數是No.26-物質或事物的數量,惡化的參數是No.10-力[7]。根據所定義的工程參數查詢矛盾矩陣,發現有3個創新原理可以參考,如表1 所示。
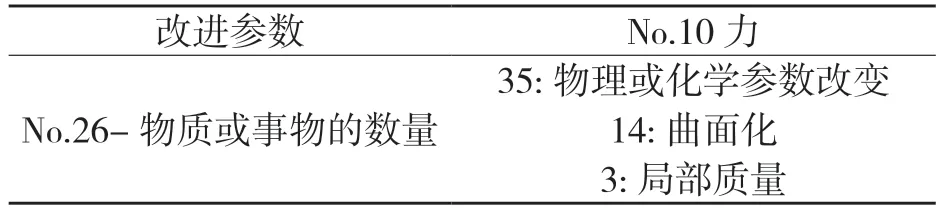
表1 矛盾矩陣表Tab.1 Contradiction matrix
根據這對技術矛盾得到的發明原理[8]35-物理或化學參數改變。通過該原理受到的啟示是除了改變電動推桿的數量,還可以改變桿件數量,得到方案2,即由三桿機構及槽型凸輪組合實現輪距伸縮。這種組合機構的特點之一是相對桿始終保持平行,且二連桿的角位移、角速度和角加速度也始終相等,增加了中輪部裝的同步性,從而提高電動輪椅的穩定性,槽型凸輪的不同行程也能實現各種場合下對輪距的要求。三桿槽型凸輪機構方案示意圖如圖8 所示。
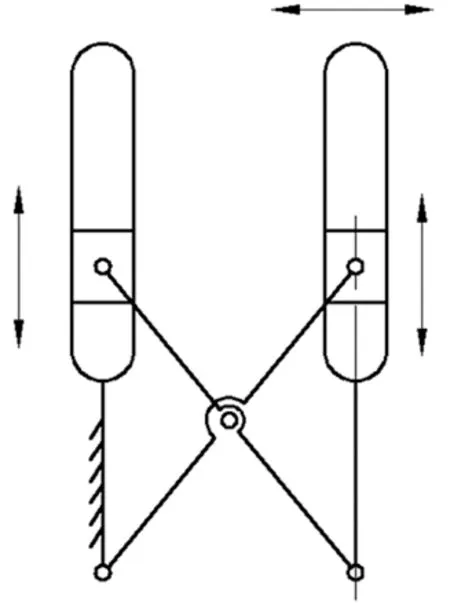
圖8 三桿槽型凸輪機構示意圖Fig.8 Schematic diagram of three-rod groove cam mechanism
根據這對技術矛盾得到的發明原理14-曲面化原理的描述,將直線、平面用曲線、曲面化代替。由此發明原理得到方案3,即通過利用圓柱凸輪結構,將旋轉運動轉化成直線運動,從而實現兩輪距離的伸縮。圓柱凸輪是一個在圓柱面上開有曲線凹槽或在圓柱端面上作出曲線輪廓的構件,它可以看做是將移動凸輪卷成圓柱體演化而成的。圓柱凸輪式推桿機構示意圖如圖9 所示。
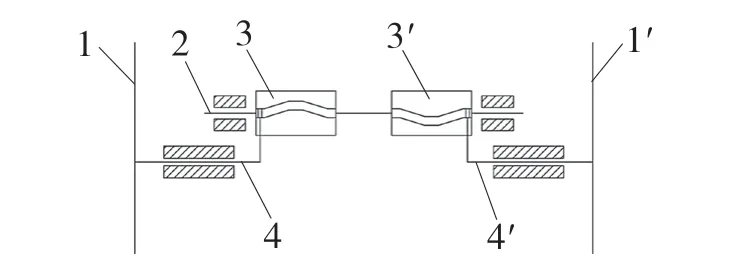
圖9 圓柱凸輪式推桿機構示意圖Fig.9 Schematic diagram of cylindrical cam push rod mechanism
3.2 問題2:中輪部裝穩定性差
3.2.1 物場模型及標準解解決問題
由于電動輪椅中輪部裝繁雜的構件間存在較大的振動,導致傳動誤差大,從而使電動輪椅整體的平穩性差。針對這一問題,對當前系統進行物場分析[9]。物場分析方法建立在現有產品的功能分析基礎上,通過建立現有產品的功能模型的過程,可以發現有害作用、不足左右及過剩作用等小問題[5]。利用這一方法首先得定義具體問題,所有的功能一般都可以分解成為3 個元素,即2個物質和1 個場。復雜系統則可分為多個物質和多個場。然后構建模型闡述它們之間的關系,為解決問題創造條件。針對本論文,具體流程如下:
(1)確定物質:S1-左右輪安裝座,S2-左右電動推桿,S3-中間連接軸套。
(2)確定場:F1-機械場1,F1-機械場2。
圖10 所示機構是由兩個電動推桿組成的四桿機構。其中左右電動推桿分別與左右輪安裝座構成機械場F1;中間連接軸套分別與左右輪安裝座構成機械場F(1由于左右對稱,故考慮一半即可)。
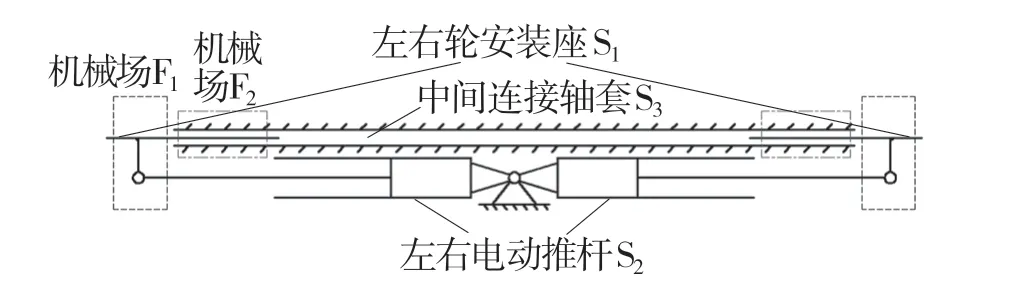
圖10 分析示意圖Fig.10 Analysis diagram
(3)將圖10 所示的系統分解,建立多個物質—場物場模型如圖11(a)所示[10]。
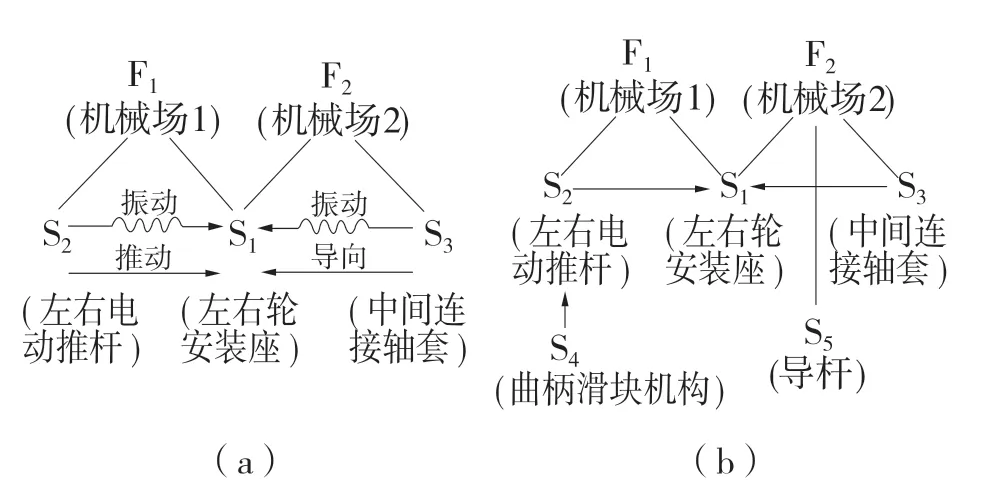
圖11 解決方案物場模型圖Fig.11 Solution object field model diagram
針對有害效應的完整物場模型,可通過76個標準解中第一類標準解,即No.10-在一個系統中有用及有害作用同時存在,通過改變S1或S2來消除害作用[6]。將這個思路具體到本課題發現,通過改變S2可得解決方案4(如圖12 所示),即在原始方案上去掉中輪部裝的一個電動推桿,使機構串聯一個曲柄滑塊機構S4來實現一個推桿控制兩個輪子安裝座,使其更加平穩地推出,從而實現輪距的伸縮,更好地達到同步性要求。
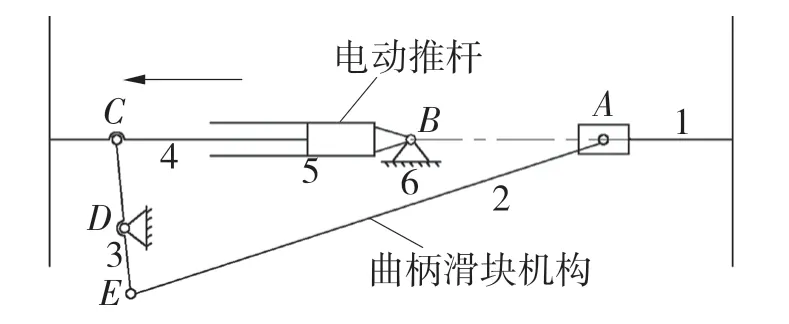
圖12 帶電動推桿式曲柄滑塊機構Fig.12 Crank slider mechanism with electric push rod
4 方案評估與選擇
綜上討論分析,可總結出表2 所示方案,最后根據方案的經濟性和可用性進行評估和選擇。其中經濟性包括方案的復雜性程度和對原設備的改動程度,這兩點直接決定材料費用以及人工成本;而有效性包括方案解決的實用性及穩定性[3]。
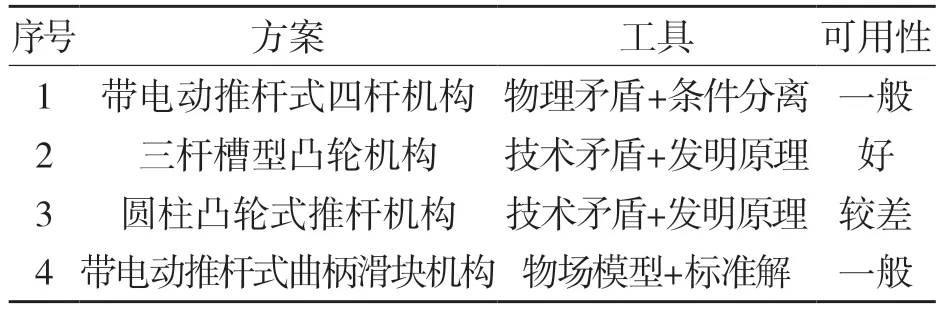
表2 方案匯總表Tab.2 Summary of schemes
方案1 為帶電動推桿式四桿機構,只需1 個推桿就能有效地實現輪距伸縮,平穩性較原始方案好,傳動角也相對小,可以有效傳遞力;方案2 為三桿槽輪機構,結構較為簡單,經濟成本低,也必將容易調試,能夠很好地完成預想要求,具有良好的穩定性;方案3 為圓柱推桿式機構,也能很好實現輪距伸縮,但圓柱凸輪上的凹槽升程需要按伸縮要求設計,方案較為復雜,較難實現,但平穩性高;方案4 為帶電動推桿式曲柄滑塊機構,設備簡單,經濟成本一般,也能較好實現項目要求,平穩性一般。
經過上述分析與評估,最終選擇對方案2 進行實施,電動輪椅中輪部裝在實現輪距伸縮時的平穩性差的問題被解決,使電動輪椅安全性顯著提高,電動輪椅中輪部裝裝置得以優化。
5 結語
對電動輪椅行駛過程中輪部裝伸縮同步性差、不穩定這一問題,進行了問題描述和定義。利用功能模型及因果鏈分析,找到造成中輪椅行駛不穩定的根本問題是中輪部裝結構復雜、傳動角大。利用物場模型、技術矛盾、物理矛盾等工具將這些根本問題轉化為TRIZ 問題模型,再通過標準解、發明原理和分離原理等工具對問題模型進行分析解決。通過技術矛盾推薦的35-物理或化學參數改變原理,從而想到增減桿數和電動推桿數來實現輪距的伸縮。最后,結合經濟性和有效性對這些方案模型進行可用性評估和選擇,即采用三桿槽型凸輪機構,有效解決了電動輪椅中輪部裝伸縮時的不平穩性。這是運用TRIZ 理論解決工程問題的成功案例,同時也為后續智能輪椅結構創新設計提供了新的設計研究思路。
猜你喜歡
科學大眾·小諾貝爾(低幼)(2025年4期)2025-04-18 00:00:00
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學雜志(2022年4期)2022-09-27 02:42:48
中老年保健(2021年2期)2021-08-22 07:29:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
作文評點報·低幼版(2020年30期)2020-07-23 06:46:17
童話世界(2020年13期)2020-06-15 11:54:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人大建設(2018年5期)2018-08-16 07:09:06
光學精密工程(2016年6期)2016-11-07 09:07:19
