彩虹-4無人機航磁三分量測量系統(tǒng)研發(fā)及應用研究
2022-10-31 09:32:56郭華王明姚雨暘常暢
地球物理學報 2022年11期
郭華, 王明, 姚雨暘, 常暢,4
1 中國自然資源航空物探遙感中心, 北京 100083 2 吉林大學, 長春 130026 3 中國地質(zhì)大學(北京), 北京 100084 4 中國地質(zhì)科學院地質(zhì)研究所, 北京 100037
0 引言
作為新興產(chǎn)業(yè)的無人機航空物探在基礎地質(zhì)調(diào)查、能源資源調(diào)查、礦產(chǎn)勘查等領域具有廣闊的應用前景,受到了許多國家普遍關注并相繼開始了基于固定翼或直升機的無人機平臺的航空地球物理勘探相關的裝備研發(fā)(Lum et al., 2005; Kurvinen et al., 2005; Partner, 2006; 張洪瑞和范正國, 2007; 熊盛青, 2009; P?ll?nen et al., 2009; Barnard, 2008, 2010; Koyama, 2013; Laliberte, 2013; Hitoshi et al., 2013; Stoll, 2013; 于顯利等, 2012; 李文杰等, 2014; 胥值禮等, 2016; 郭華和謝宏,2018;李飛等, 2018;張富明等,2019;鞠星等,2020a,b;謝小國等,2021).無人機航空物探技術在國外的發(fā)展以及相關應用相對國內(nèi)成熟度較高,已經(jīng)在許多領域開展了試驗或應用(李文杰等, 2014);近十年國內(nèi)中國自然資源航空物探遙感中心、中國地質(zhì)科學院及中國科學院遙感與數(shù)字地球研究所、中船重工第七一五研究所等多家單位先后開展的基于固定翼或直升機的無人機航磁測量技術的研究工作尚處于研究階段.2012—2015年,為滿足國內(nèi)地質(zhì)調(diào)查和礦產(chǎn)資源勘探的迫切需求,中國地質(zhì)調(diào)查局組織中國地質(zhì)科學院地球物理地球化學勘查研究所、核工業(yè)航測遙感中心和航天空氣動力技術研究院等多家科研單位共同研制完成了世界上第一套基于“彩虹-3”無人機航空地球物理勘探的綜合測量系統(tǒng),自此無人機開始了在地質(zhì)資源調(diào)查領域的民用征程.基于“彩虹-3”無人機航空地球物理勘探測量系統(tǒng)相對于以往的航空地球物理勘探測量系統(tǒng)具備較強的環(huán)境適應能力、較高的安全保障、優(yōu)秀的夜航巡航能力,目前為止在我國及贊比亞等地“彩虹-3”無人機航空地球物理綜合測量系統(tǒng)累計完成16.5萬測線公里的調(diào)查任務,填補了國內(nèi)外無人航空地球物理測量領域裝備的空白(中國地質(zhì)科學院, 2014; 郭華和謝宏, 2018).
“彩虹-4”無人機是中國航天科技集團公司下屬的航天彩虹無人機股份有限公司在“彩虹-3”無人機基礎上研發(fā)的一種中程察打/偵察探測(民用版)一體無人機;其性能上,較“彩虹-3”無人機有了很大的提升(http:∥baike.baidu.com/view/9615585.html),其翼展18.0 m,最大起飛重量1330 kg,最大使用半徑2000 km,輕載100 kg時航時約30 h,最大裝載量可達345 kg,航時約12 h,是中空長航時無人機(鞠星等,2020b;崔志強等,2016),但其作為無人機航空物探搭載平臺在國內(nèi)外行業(yè)領域內(nèi)屬于空白.在航空磁測領域,與傳統(tǒng)的航空磁總場測量相比,矢量測量所獲得的地磁場模量大小和方向信息能夠有效減少反演的多解性,提高地下磁性異常體的探測精度(林君等,2017).對于航空磁矢量測量,國內(nèi)外相繼開展了相關的研究(Christensen and Dransfield, 2002;孫昂等,2017;Xie et al., 2020),而基于“彩虹-4”固定翼無人機航磁三分量測量系統(tǒng)的研發(fā)在國內(nèi)外也屬于首次.
中國自然資源航空物探遙感中心在國家重點研發(fā)項目“航空磁場測量技術系統(tǒng)研制”支持下,與吉林大學、中國航天空氣動力技術研究院以及中國地質(zhì)科學院物化探研究所等多家科研院所合作首次開展了“彩虹-4”無人機航磁三分量測量系統(tǒng)研發(fā)工作.通過開展“彩虹-4”無人機平臺改裝與系統(tǒng)集成、無人機航磁三分量磁補償?shù)群诵暮完P鍵技術研究,以及飛行測試試驗(飛行平臺靜態(tài)干擾測試、飛機磁本底測試、高空八邊形磁干擾補償飛行、低空重復線飛行以及實際測區(qū)飛行)等工作,成功地獲取了高質(zhì)量的“彩虹-4”無人機磁本底數(shù)據(jù)和無人機三分量磁測數(shù)據(jù).2019年在國內(nèi)西北某地圓滿完成試驗飛行,“彩虹-4”無人機航磁三分量測量系統(tǒng)各項指標滿足《航空磁測技術規(guī)范》(DZ/T 0142-2010)(中華人民共和國國土資源部, 2010)的要求,測量精度達到25 nT的長航時、大航程、超視距、高精度飛控設計指標,填補了國內(nèi)外“彩虹-4”無人機航磁三分量測量裝備的空白,形成了一套高安全、高效率、高質(zhì)量、全天時、長航時、超低空的智能化“彩虹-4”無人機航磁三分量測量方法技術,為我國地質(zhì)調(diào)查和礦產(chǎn)資源勘探增添了先進、安全、可靠的技術和裝備,促進了我國基于無人機的航空物探勘探產(chǎn)業(yè)的進一步發(fā)展,研究成果具有很好的應用前景.
1 測量系統(tǒng)組成
1.1 航磁三分量測量原理
圖1所示,地磁場7要素T(地磁場總強度)、X(地磁場北向分量)、Y(地磁場東向分量)、Z(地磁場的垂直分量)、H(地磁場水平分量)、I(地磁傾角)、D(地磁偏角)空間關系為:

圖1 地磁要素示意圖Fig.1 The diagram of seven elements of geomagnetic field

根據(jù)坐標系不同,可以將7個分量劃分為:直角坐標系中有X、Y、Z,球坐標系中有H、I、D,柱坐標系中有Z、H、D;測得其中一組就可以求出其他分量(王一,2015).
1.2 系統(tǒng)組成
“彩虹-4”無人機航磁三分量測量系統(tǒng)主要由“彩虹-4”無人機平臺、三分量磁力儀、光泵磁力儀、高精度慣導系統(tǒng)、高度計、數(shù)據(jù)采集和收錄系統(tǒng)組成,如圖2所示.

圖2 “彩虹-4”無人機航磁三分量測量系統(tǒng)組成示意圖Fig.2 The diagram of aeromagnetic three-component detction system for CH-4 UAV
1.3 三分量磁力儀
三分量磁測系統(tǒng)所用三軸型號是英國Bartington公司生產(chǎn)的Mag-03MS100,性能指標詳見表1;慣導系統(tǒng)采用的是加拿大NovAtel公司生產(chǎn)的SPAN-IGM-S1,性能見表2.

表1 三軸磁力儀性能指標Table 1 Performance index of triaxial magnetometer

表2 慣導系統(tǒng)性能指標Table 2 Performance index of inertial navigation system
2 系統(tǒng)試驗測試
2.1 飛機磁本底測試
無人機的機體是由鐵磁性材料和非鐵磁性材料構(gòu)成的,鐵磁性材料是機體上的主要磁干擾源.首先,為了最大限度消除機體上的磁干擾,我們采用鋁合金、碳纖維復合材料等無磁性材料對無人機進行改裝;其次,測試無人機的磁本底數(shù)據(jù),以便確定三分量磁測系統(tǒng)安裝位置.根據(jù)機體的長度和寬度設計的測量區(qū)域為18 m×12 m,網(wǎng)格化間隔為1 m,共216個測點(高全明, 2020).
無人機機體磁本底測量共分三步:第一步在沒有無人機停放的情況下,利用光泵磁力儀測量216個測點的地磁場強度和對應點的磁日變數(shù)據(jù);第二步在無人機停放的情況下,重復第一步的操作;第三步利用第二步測量的磁場數(shù)據(jù)減去第一步測量的磁場數(shù)據(jù)和磁日變數(shù)據(jù),即為無人機機體磁本底數(shù)據(jù)(圖3).

圖3 “彩虹-4”無人機機體左半部分磁本底測試結(jié)果Fig.3 Magnetic background test results of left half for CH-4 UAV
2.2 飛機發(fā)動干擾測試
測試無人機在飛行過程,發(fā)動機對三軸磁力儀產(chǎn)生的磁干擾影響.主要測試和分析無人機的發(fā)動機處于“停止”、“啟動”和“臨飛”三種狀態(tài)下產(chǎn)生的磁干擾情況 (高全明, 2020),如圖4所示.

圖4 發(fā)動機在不同工作狀態(tài)下的磁干擾曲線Fig.4 The curve of magnetic interference for CH-4 engine under different working conditions
從圖4中可以看到,當無人機的發(fā)動機啟動過程中,磁場曲線上會出現(xiàn)一個明顯地“階躍響應”變化,這個變化隨著無人機的發(fā)動機轉(zhuǎn)速的提升而不斷增大,直到發(fā)動機轉(zhuǎn)速達到“臨飛”狀態(tài)后開始趨于平穩(wěn),整個過程測量的數(shù)值,變化幅度約為60 nT.因此,當無人機的發(fā)動機轉(zhuǎn)速保持不變或勻速飛行狀態(tài)時,可視為其產(chǎn)生的磁干擾源是穩(wěn)定.
2.3 重復性飛行測試
重復線飛行測試的目的是為了檢驗“彩虹-4”無人機航磁三分量磁測系統(tǒng)的動態(tài)性能 (高全明, 2020),進而保證磁測數(shù)據(jù)的質(zhì)量;重復線飛行測試是以測線和重復線測量的磁測數(shù)據(jù)曲線的重合度為量化評估指標.
圖5所示為兩條重復測線飛行軌跡,長度約30 km,偏移距離不超過20 m,平均飛行高度分別為612.03 m和605.18 m,高度偏差小于7 m.

圖5 重復線試驗飛行航跡圖Fig.5 The diagram of repeated line test flight
圖6所示為重復線試驗獲取的航磁三分量數(shù)據(jù)對比結(jié)果.從圖中可以直觀地看出兩條重復線上對應點的x、y和z分量的磁測數(shù)據(jù)曲線變化趨勢有較好的重合度,內(nèi)符合精度ε分別為5.43 nT、11.61 nT和11.19 nT;試驗結(jié)果驗證了基于“彩虹-4”無人機的航磁三分量測量系統(tǒng)具有很好的一致性和穩(wěn)定性.
2.4 磁補償飛行試驗
磁補償飛行試驗是將未進行磁補償處理的航磁x、y、z三分量數(shù)據(jù)由機體坐標系轉(zhuǎn)換到空間地理坐標系下 (高全明, 2020),如圖7所示.圖中顯示出,坐標轉(zhuǎn)換后三分量數(shù)據(jù)變化幅度很明顯,主要是由機體產(chǎn)生的磁干擾所導致的,特別是z分量數(shù)據(jù)變化幅度尤為明顯,這說明了進行磁補償是十分必要的.
根據(jù)《航空磁測技術規(guī)范》(DZ/T 0142-2010)(中華人民共和國國土資源部, 2010),磁補償飛行試驗在敦煌市機場附近磁場變化穩(wěn)定的區(qū)域進行,磁場梯度值不超過60 pT/m,磁環(huán)境滿足磁補償飛行試驗要求.在磁補償飛行試驗中“彩虹-4”無人機按照順時針方向沿著0°→90°→180°→270°和45°→135°→225°→315°的矩形閉合框飛行(圖8),邊框的航線的長度約為16 km,平均飛行高度為3974.46 m,高度變化小于15 m;在每一邊上依次完成航向、橫滾和俯仰三個補償飛行動作,運動幅度變化為±5°(圖9),用時約40 min.如圖10所示,磁補償飛行時慣導系統(tǒng)記錄姿態(tài)角度的變化情況.
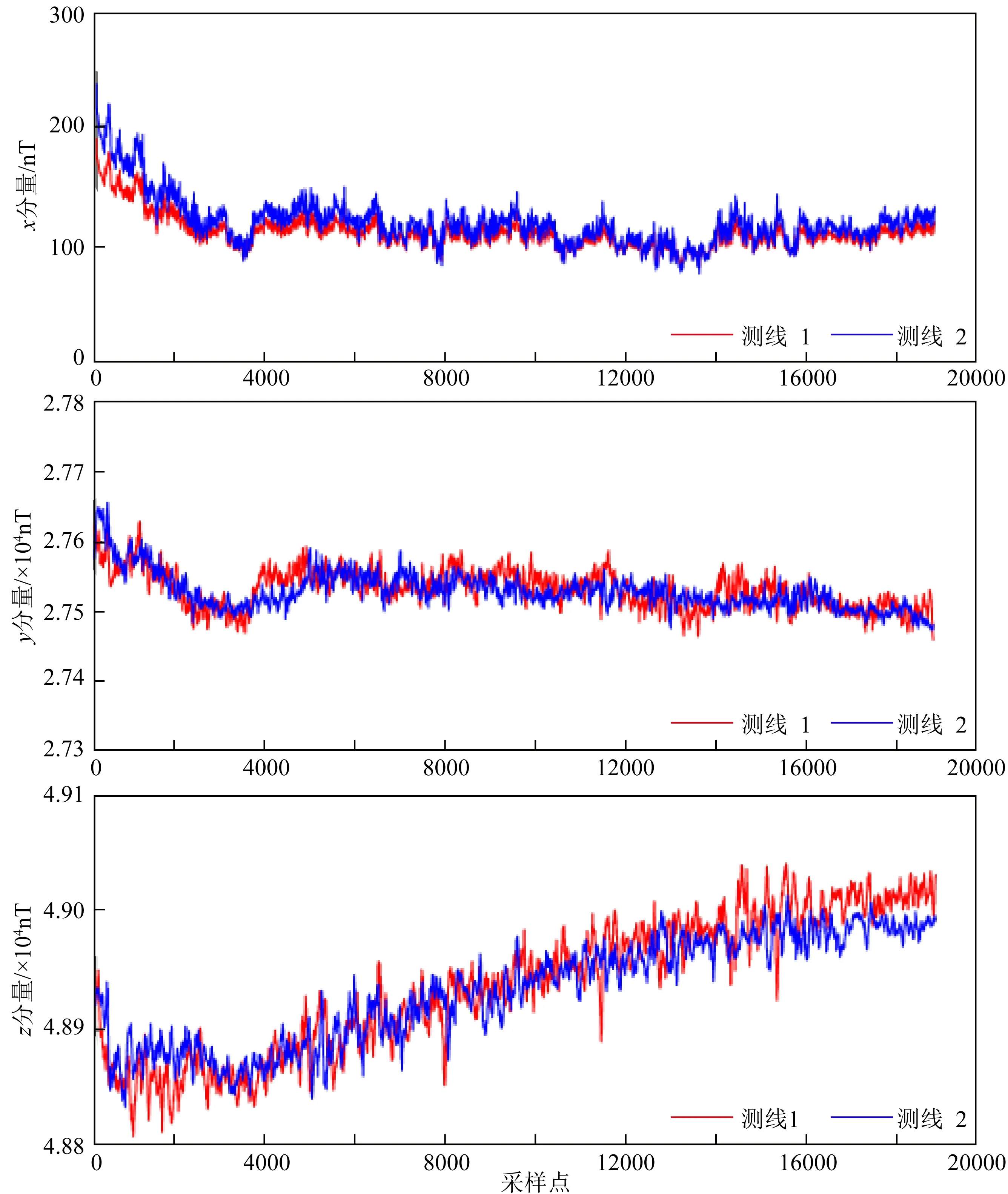
圖6 航磁三分量數(shù)據(jù)重復性對比圖Fig.6 The comparison diagram of repeated lines for aeromagnetic three-component

圖7 坐標轉(zhuǎn)換前后航磁三分量磁測數(shù)據(jù)對比圖Fig.7 The comparison diagram of before and after coordinate transformation for aeromagnetic three-component
同時,為了評價航磁三分量磁補償方法的可靠性,文中采用了布谷鳥搜索算法進行計算,并分別與基于無跡卡爾曼濾波算法(UKF)和遺傳算法(GA)的磁補償方法進行對比分析 (高全明, 2020),結(jié)果如圖11所示.按照《航空磁測技術規(guī)范》(DZ/T 0142-2010)(中華人民共和國國土資源部, 2010)的要求,應用CS補償算法的航磁x、y、z三分量的動態(tài)四階差分噪聲水平均小于25 nT,并且從異常曲線可以看出,補償后的曲線更平滑,補償效果更加明顯.

圖8 磁補償飛行軌跡示意圖Fig.8 The diagram of magnetic compensation flight

圖9 磁補償飛行時飛機動作示意圖Fig.9 The diagram of aircraft action during magnetic compensation flight
3 實際飛行試驗
在敦煌機場附近開展區(qū)域磁測飛行試驗,測線軌跡如圖12所示,共飛行了6條測線,每條測線長度約為10.7 km,線距為520 m,飛行高度約450 m,高度偏差不超過20 m,滿足《航空磁測技術規(guī)范》(DZ/T 0142-2010)(中華人民共和國國土資源部, 2010)規(guī)范要求.

圖10 “彩虹-4”無人機磁補償飛行姿態(tài)角度變化Fig.10 The diagram of magnetic compensation flight attitude angle change for CH-4 UAV
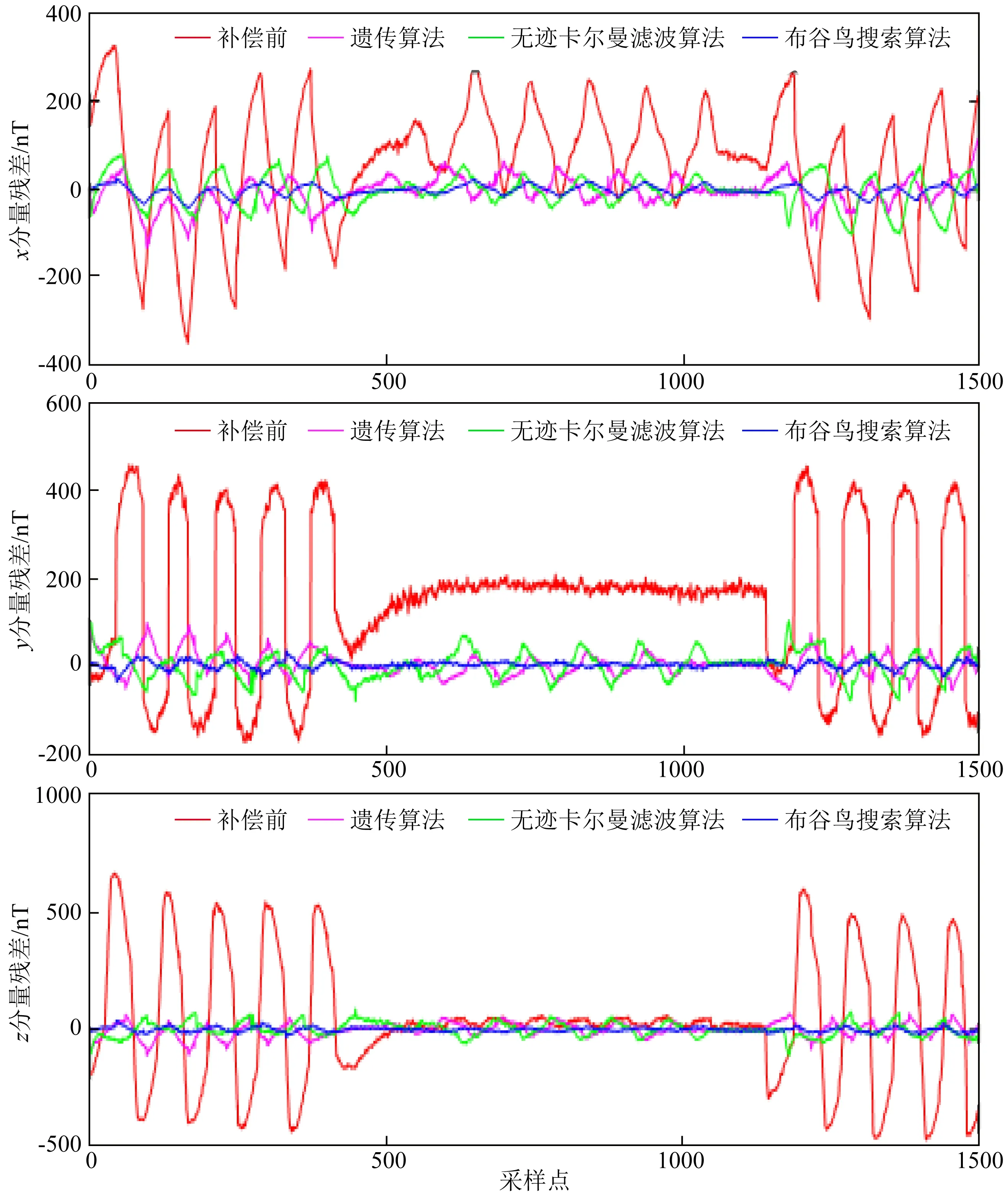
圖11 磁干擾補償結(jié)果Fig.11 The diagram of magnetic interference compensation results
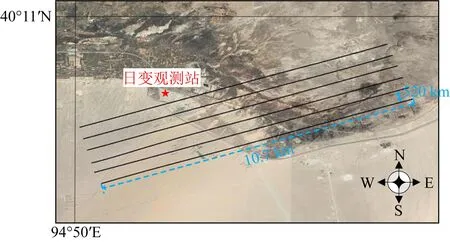
圖12 實際飛行試驗測線軌跡示意圖Fig.12 The diagram of line distribution in actual flight test

圖13 磁補償前航磁三分量合成總場剖面圖Fig.13 The profile of total field calculated by aeromagnetic three-component before magnetic compensation
圖13為未進行磁補償處理的航磁三分量磁測數(shù)據(jù)合成總場剖面圖.可以看出,由每條測線的航磁三分量數(shù)據(jù)轉(zhuǎn)換的航磁總場曲線變化幅度較大、規(guī)律性和相關性差.
為了評估航磁三分量數(shù)據(jù)的精度,我們將由磁補償處理后的航磁三分量數(shù)據(jù)轉(zhuǎn)換的總場數(shù)據(jù)與同機CS-3銫光泵磁力儀測得的航磁總場數(shù)據(jù)進行對比分析.圖14顯示了分別經(jīng)過磁補償處理與日變改正的實測總場數(shù)據(jù)與三分量合成總場數(shù)據(jù),航磁三分量數(shù)據(jù)換算的磁總場變化趨勢與實測磁總場變化整體趨勢基本一致,異常幅值、異常形態(tài)與實測總場吻合;但前者在梯度過渡帶內(nèi)的磁梯度變化更強烈、主要是由磁干擾補償處理與各項誤差校正不徹底導致的.同時,數(shù)據(jù)的顯示的梯級帶由測線飛行高度差異所引起,因此,需要做進一步的調(diào)平等處理.

圖14 航磁總場數(shù)據(jù)對比(a) 實測的航磁總場數(shù)據(jù); (b) 航磁三分量數(shù)據(jù)換算的總場數(shù)據(jù).Fig.14 The comparison diagram of aeromagnetic total field obtained by different methods(a) Total field measured by optical-pump magnetometer; (b) Total field calculated by aeromagnetic three-component.

圖15 航磁三分量磁測數(shù)據(jù)等值線圖(a) x分量等值線圖; (b) y分量等值線圖; (c) z分量等值線圖.Fig.15 The contour map of aeromagnetic three-component magnetic(a) The contour map of x component; (b) The contour map of y component; (c) The contour map of z component.
圖15所示為航磁x、y、z三個分量的磁場等值線圖.由圖15a和圖15b的磁場特征可以看出,沿著北東向存在一個明顯的航磁梯度變化帶,與圖14中航磁總場反映的梯度變化帶保持著很好對應關系;圖15c中z分量的磁場特征與圖14中航磁總場特征相比,二者的變化趨勢一致且高度吻合.因此,航磁三分量數(shù)據(jù)不但可以很好的表征航磁總場特征,還能提供豐富的x、y、z三個方向的磁場分量信息.基于彩虹-4固定翼飛行平臺的航磁三分量測量系統(tǒng)的成功試驗飛行,獲取了高精度實測三分量數(shù)據(jù)集,為后續(xù)的反演與解釋工作提供豐富的數(shù)據(jù)基礎,有效降低反演的多解性.同時,依托彩虹-4固定翼無人機長航時、適應夜航、大載重、超低空、適應無磁化改造等特性,此航磁測量系統(tǒng)的研發(fā)對于我國大面積、實用化的航磁多參量測量飛行具有十分重要的意義.
4 結(jié)論
通過技術攻關,我國首次成功地將“彩虹-4”無人機改裝集成應用到航空物探領域,首次成功地研發(fā)出基于“彩虹-4”無人機平臺的航磁三分量測量系統(tǒng),填補了國內(nèi)外航空地球物理勘探領域內(nèi)裝備的空白.實際試驗飛行驗證了“彩虹-4”無人機航磁三分量測量系統(tǒng)各項指標滿足《航空磁測技術規(guī)范》(DZ/T 0142-2010)(中華人民共和國國土資源部, 2010)要求,測量精度達到25 nT的長航時、大航程、超視距、高精度飛控設計指標,形成了一套高安全、高效率、高質(zhì)量、全天時、長航時、超低空的智能化“彩虹-4”無人機航磁三分量測量方法技術,為我國地質(zhì)調(diào)查和礦產(chǎn)資源勘探增添了先進、安全、可靠的技術和裝備,促進了我國基于無人機的航空物探勘探產(chǎn)業(yè)的進一步發(fā)展,研究成果具有很好的應用前景.
致謝本文研究工作得到了中國地質(zhì)科學院物化探研究所劉俊杰高級工程師、吉林大學趙靜教授、高全明博士的大力支持,在此表示衷心的感謝.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
