無人機線路自主巡檢的動態軌跡規劃方法
2022-11-01 03:32:32徐其春郭晨晨劉志明馬亞運李建輝
電力系統及其自動化學報 2022年10期
關鍵詞:規劃
徐其春,郭晨晨,劉志明,馬亞運,潘 卓,李建輝
(國網冀北電力有限公司唐山供電公司,唐山 063000)
隨著電力系統規模的不斷發展壯大,輸電線路的運維和檢修工作也越來越重要。而長距離輸電線路通常所處自然環境復雜惡劣,采用傳統人工巡檢存在巡檢效率低、風險大、成本高等問題,因此,成本低、操作簡便的無人機設備在長距離輸電線路巡檢作業中得到了廣泛應用[1-3]。無人機巡線環境通常地形復雜、遭受的突發威脅多變,且在對高電壓水平輸電線路進行巡查時可能受到線路空間電場干擾[4],導致無人機發生故障甚至撞線事故。因此準確測定無人機與輸電線路的安全距離、制定安全的巡檢路線,對提升無人機巡檢精度、實現智能化無人機巡線有著重要意義。
目前,已有許多成熟的測距技術,包括激光測距、超聲波測距、紅外測距、雙目視覺測距技術[5-8]等。但在無人機巡線中常使用小型無人機進行作業[9-11],其特點為載荷小,無法掛載大型的測距設備,因此目前傳統無人機巡線測距方法通常采用全球定位系統GPS(global positioning system)坐標轉換測距或激光測距。但上述兩種傳統測距手段存在測量精度不高、設備結構復雜、巡線成本較高等問題。
國內外許多學者均對無人機軌跡規劃進行了大量的研究,主要包括全局靜態航跡規劃和局部動態航跡規劃兩部分。其中,在全局靜態航跡規劃方面研究已較為成熟,例如:采用GPS 系統結合圖像處理與跟蹤算法保持在輸電線路上方進行巡線飛行[12];引入智能群優化算法選取最優巡航路徑[13-15]等。但全局靜態航跡規劃僅適于預先掌握的環境障礙信息規劃航跡,無法應對巡線中可能發生的突發障礙,因此,目前研究重點主要集中于局部動態航跡規劃。局部動態航跡規劃通常被分析為一種多約束最優求解問題,此類問題多采用智能優化算法進行規劃[16-22]。但采用智能優化算法雖然能在保證軌跡精度的情況下規避故障,但需要無人機額外掛載多種設備采集環境信息[23-24],而且隨著環境復雜程度的增高需要大量時間規劃新路徑,導致無法規避突發障礙。
針對上述問題,本文提出一種基于靜態、動態兩種突發威脅的動態航跡規劃的無人機輸電線路自主巡檢方法。首先,通過光學觀測設備測量桿塔的成像高度及相鄰桿塔的間距,計算無人機與輸電線路間的安全距離;然后,將無人機巡線可能遭遇的各類突發情況分為靜態威脅與動態威脅,建立兩種突發情況下的航跡規劃模型,采用改進雙向快速擴展隨機樹RRT(rapidly-exploring random tree)算法進行航跡重規劃;最后,根據上述巡檢軌跡規劃建立無人機自主巡檢系統流程框架,實現全過程自主巡檢。系統應用的結果表明,該系統可以提高巡線效率,降低巡檢作業風險。
1 水平安全距離標準
長距離輸電線路通常位于山區、丘陵等崎嶇地形中,導致人工巡檢成本高、風險大,而引入無人機巡檢可有效解決該問題。但在無人機進行巡檢作業時,由于長距離輸電線路通常為高壓線,線路周邊分布有磁場干擾,影響無人機設備正常工作,甚至導致無人機失控發生撞線事故。因此,需要快速且實時測量無人機與線路間距離并進行調整,保障無人機在巡檢過程中的安全性。
根據輸電線路結構及無人機設備結構特點,無人機與輸電線路間的安全距離Ds可表示為

式中:I1、I2分別為輸電線路兩側磁場不影響無人機進行作業的臨界距離;I3、I4分別為輸電線路兩側電場不影響無人機進行作業的臨界距離;x1為預先規劃航跡與無人機實際航跡間的誤差距離;x2為風力造成的位置偏差距離;x3為測距儀的測量誤差距離;x4為GPS 定位距離偏差;v為無人機飛行速度;t為無線通訊最大延時;a1為無人機機翼長度;a2為無人機機頭與其主軸的距離;a3為無人機機尾與其主軸的距離;a4為無人機機載云臺與無人機主軸的距離。
根據不同的輸電線路電壓等級,其磁場、電場強度影響距離也有所不同。而對于目前實際無人機巡檢作業常用的小型無人機,在不同電壓等級下設定的安全巡檢距離如表1所示。
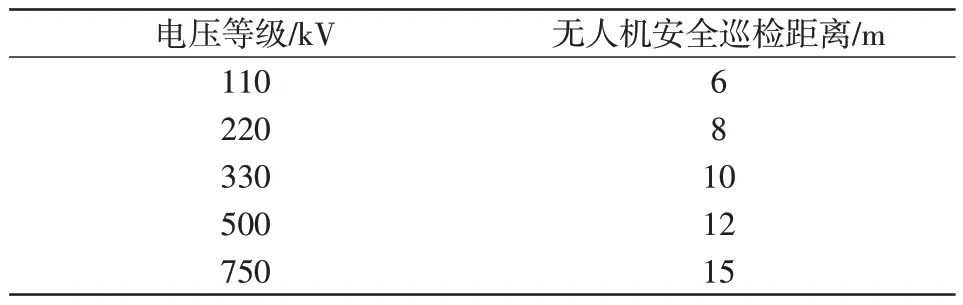
表1 電壓等級與安全距離之間的關系Tab.1 Relationship between voltage level and safety distance
1.1 傳統測距方法
傳統的測距方法包括激光測距、超聲波測距、紅外測距、雙目視覺測距技術等,但傳統測距方法受限于設備成本、測量精度、無人機載荷和設備功耗,不適用于目前的輸電線路巡檢作業。因此目前在小型無人機線路巡檢中常采用成本較低、測距原理簡單的GPS 定位測距或激光測距方法實現無人機與線路間距的實時檢測。
1.1.1 基于GPS 坐標轉換方法
基于無人機巡檢的桿塔GPS 坐標與無人機實時GPS坐標,可以得到無人機與當前巡檢線路間的水平距離。GPS技術的測距方法雖然簡單易行,但GPS在水平距離上仍存在一定誤差,同時GPS在無人機的高程距離上無法進行精確定位,因此無法判斷無人機與地面間的垂直距離。目前,GPS定位誤差距離通常在2.5 m,對于常見的500 kV 和750 kV線路的巡檢安全而言距離較大,相對誤差在17%~21%,存在較高的撞線風險;在山區等GPS 信號較弱的地區,其測量誤差會進一步擴大。因此,GPS測距法并不適用于小型無人機巡檢,尤其是高壓輸電線路巡檢。
1.1.2 基于激光掃描的測距方法
激光掃描的測距方法是通過無人機搭載的激光掃描儀等激光設備,對輸電線路發射激光并接收反射光形成立體建模以進行實時測距。該方法可以對輸電線路進行全面測量,如輸電線路弧度、導線間距、導線凈空距離等,便于無人機對線路狀態進行全面分析。激光掃描測距方法雖然測得信息全面,且精度較高,但其需要在無人機上搭載大量設備,對無人機的載荷、能耗有很大要求,因此,基于激光掃描的測距方法常用于無人直升機巡檢中。
1.2 單目視覺測距方法
針對上述傳統測距方法存在的問題,本文采取測距精度誤差相對較小,成本較低的單目視覺測距方法進行測距。
根據《架空輸電線路桿塔結構設計技術規定》可確定桿塔實際高度,因此,通過無人機搭載的光學設備,可以對相鄰的輸電線路桿塔進行拍照,測量所拍攝圖片中的桿塔間距,基于小孔成像原理即可得到無人機與輸電線路間的水平距離。
無人機單目測距原理如圖1 所示。其中,l為像A′、B′的像間距離;θ0為像A′、B′的成像夾角;θ為桿塔A、B在無人機光學中心處的夾角;α為無人機光學中心到桿塔B與線路AB間的夾角;ua、ub、va、vb分別為桿塔A、B 的物距和像距;L為輸電線桿塔A 到桿塔B 的實際距離;x為無人機與輸電線路間的水平間距。
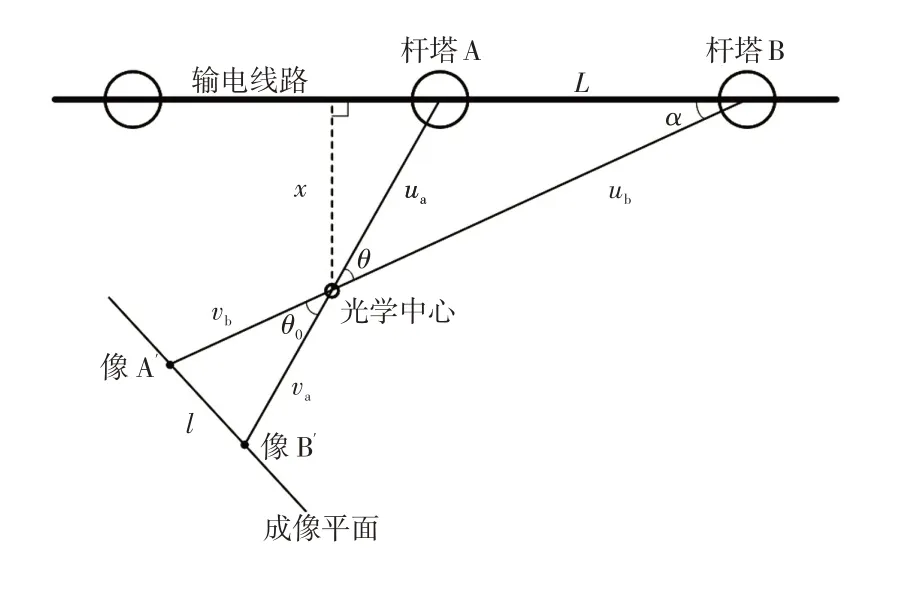
圖1 單目測距原理Fig.1 Schematic of monocular ranging
假定桿塔高度為H,相機焦距為f,由無人機攝影的圖像中獲得桿塔的高度為ha、hb,則無人機與桿塔A、B間的物距分別為
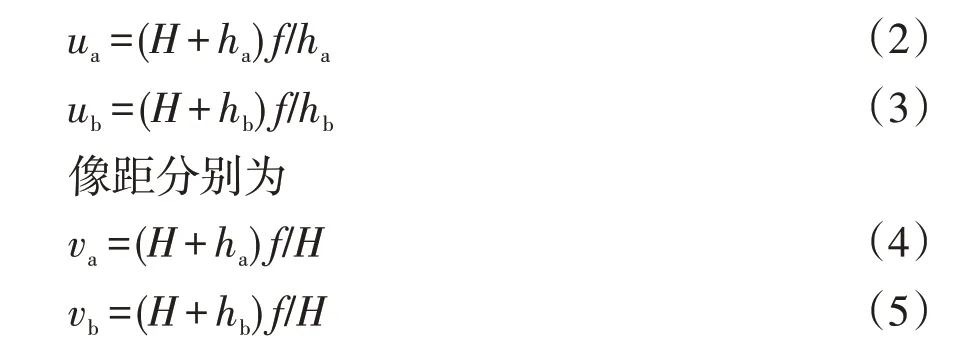
無人機離輸電線路的距離x為

在無人機巡檢系統中,通過單目視覺測距法測量得到無人機與桿塔和線路間距,與巡檢線路電壓等級對應的安全距離相比較,通過對巡檢航跡的實時校正,使無人機巡檢能夠安全飛行。
2 無人機巡線航跡規劃
在無人機巡檢作業中,無人機軌跡規劃是保證其巡線效率和巡檢安全的一個重要問題。為了降低該問題的復雜性,本文將航跡規劃分為全局靜態航跡規劃和局部動態航跡規劃兩部分進行分析。
2.1 全局靜態航跡規劃
全局靜態航跡規劃是指在無人機進行巡檢前,根據巡檢目標桿塔及線路,提前規劃出的巡檢路線。該航跡在規劃時不會預測線路中可能出現的突發情況,因此僅考慮事先掌握的地理環境信息進行規劃,即,僅需考慮巡檢路線的距離而不需考慮實時性。
本文的無人機巡檢全局靜態航跡規劃步驟如下:
步驟1按照所分布的巡檢線路,確定無人機飛行區域、巡檢順序和無人機巡檢起點和終點;
步驟2基于確定的飛行路線,獲得相應區域內的地理環境信息,構建整體飛行環境;
步驟3結合無人機與飛行環境各因素的約束,在全局飛行環境中規劃出最優飛行航跡。
2.2 局部動態航跡重規劃
局部動態航跡規劃是指在無人機巡檢作業過程中,發生突發障礙或威脅的情況,例如飛鳥、樹枝掉落和未知障礙物等事先無法預知的威脅,無人機根據規劃的航跡飛行不能躲避,需要重新規劃飛行路徑。由于巡檢作業中突發威脅是未知的,動態航跡規劃相對全局航跡規劃有更高的實時性,確保無人機在不偏離原有的計劃航線的同時,避開突發威脅。
無人機可能遭遇的突發威脅種類繁多且發生機理復雜,為簡化分析,本文將突發威脅分為兩種,一種為規劃全局航跡時未發現的靜態突發威脅,例如高大樹木、預先沒有發現的障礙等;另一種是動態突發威脅,例如飛鳥、其他飛行無人機等。
2.2.1 靜態突發威脅航跡規劃
對于靜態威脅,其特點為障礙物阻擋的區域固定,因此可根據無人機當前位置與故障區域劃定重規劃區域,在區域內重新規劃巡檢路線規避固定障礙物。因此可采用雙向RRT算法進行重規劃。
靜態突發威脅航跡重規劃如圖2 所示,其中,實心圓表示突發靜態威脅范圍;start′為無人機當前位置;goal′為無人機躲避威脅后的位置。
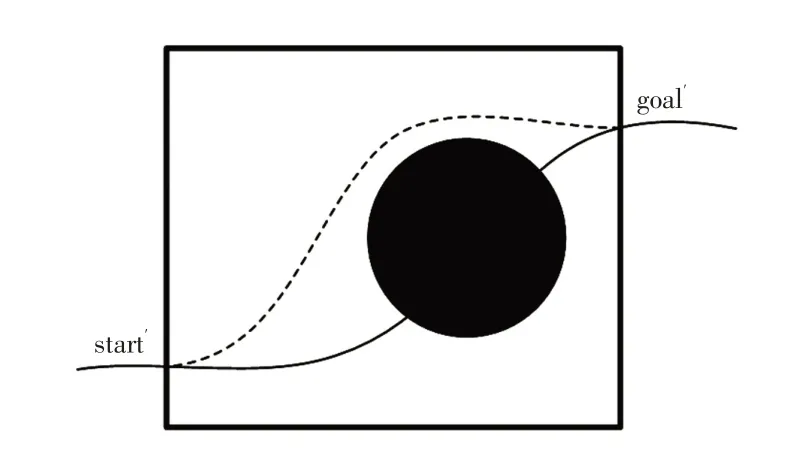
圖2 靜態突發威脅示意Fig.2 Schematic of static emergent threat
無人機靜態突發威脅航跡規劃步驟如下。
步驟1通過對無人機當前位置和靜態威脅范圍的分析,確定航跡重規劃區域。
步驟2確定重規劃區域起點start′和終止點goal′。
步驟3建立2 棵搜索樹,分別以start′和goal′作為2棵樹的根節點。
步驟4擴展2 棵搜索樹。首先擴展,以goal′作為隨機節點,在中選取距離goal′最近的葉節點xnearest,并向其擴展至無法擴展;若擴展失敗,則在重規劃區域選取1 個隨機點xrand進行擴展。的擴展方法與相同,但的最新節點作為葉節點進行擴展,若沿該方向擴展失敗則在重規劃區域內選取1 個隨機點xrand進行擴展。完成擴展之后,互換,并進行新一輪擴展,直到葉節點相互連接。在每次擴展中,均對擴展節點進行連接,若避開威脅區域則說明已對接完成。
步驟5連接在一起后,回溯生成航跡。
步驟6對航跡進行平滑處理。
步驟7無人機根據重規劃的航跡躲避障礙物后,回到全局靜態航跡上繼續巡檢任務。
2.2.2 動態突發威脅航跡規劃
對于第2.2.1節敘述的RRT算法,由于其生成葉節點時為隨機生成,具有很大隨機性,不適用于躲避威脅位置實時變化的動態突發威脅情況。因此在RRT 算法中的葉節點生成策略中考慮運動軌跡方程,根據無人機與動態威脅的運動軌跡規劃路徑,并以規避代價選取最優路徑解決這種隨機性問題。
由于動態突發威脅航跡規劃問題較為復雜,不同威脅在運動速度、體積上差異較大,不利于快速規劃,因此本文做出以下假設:
(1)在無人機巡檢作業中,由于無人機體積較小,所以將其簡化成質點進行軌跡分析;
(2)無人機飛行速度保持恒定;
(3)本文考慮的動態突發威脅同樣為小型物體,因此將其簡化為質點進行分析;
(4)對于突發威脅,僅考慮其做勻速直線運動。
在RRT算法的基礎上考慮運動軌跡方程,建立以重規劃區域的起始點為樹的根節點。對于葉節點的生成,以重規劃區域的目標點作為xrand,且擴展方式與RRT算法相同,若擴展成功則與靜態突發威脅中擴展方式一致;若擴展失敗,則通過運動軌跡方程來確定xrand的選取。
在無人機軌跡模型中,其水平方向上的運動軌跡方程可表示為

式中:θk為無人機在水平方向上的飛行航向;θk+1為無人機在下一目標點水平方向上的飛行航向;(xk,yk)和(xk+1,yk+1)分別為當前航路點和下一航路點的橫、縱坐標;s為航跡段長度。
在無人機垂直方向的運動軌跡方程中,根據當前航路點與目標點的連線可得垂直坐標距離的變化為
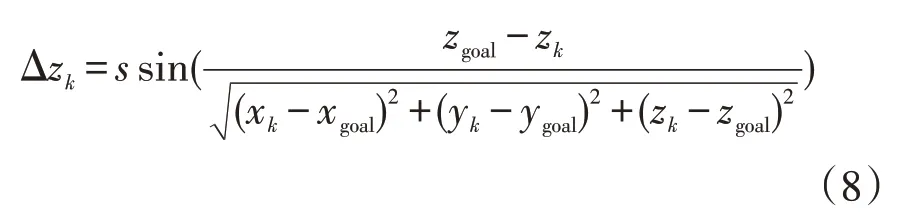
式中:zk、zk+1分別為當前航路點和下一目標點的垂直坐標;xgoal、ygoal和zgoal分別為目標點的橫坐標、縱坐標和垂直坐標。
動態威脅的運動方程可表示為
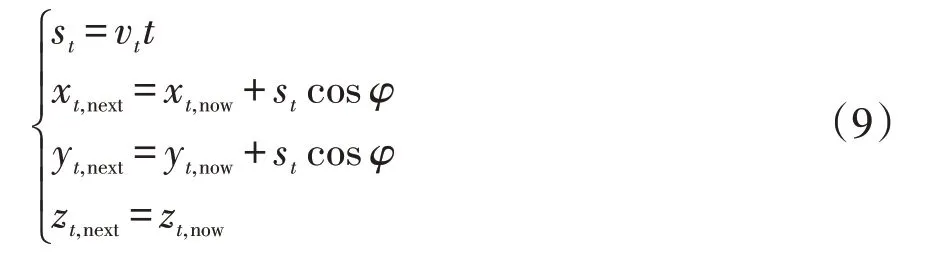
式中:(xt,now,yt,now,zt,now)為探測到的威脅當前位置;φ為威脅飛行的水平方向的飛行航向;t為無人機采樣間隔;vt為動態威脅在采用間隔t內的行動速度;st為動態威脅在采用間隔t內的飛行距離;(xt,next,yt,next,zt,next)為威脅的下一時刻預計位置坐標。
根據動態威脅影響范圍及移動方向,無人機可以在水平方向及垂直方向進行規避,為了選取最優規避路徑,設定代價函數F確定每個節點的移動代價來選取最優節點,即

本文的無人機動態突發威脅航跡規劃步驟如下。
步驟1通過對無人機當前位置、動態威脅范圍和速度的分析,確定航跡重規劃區域。
步驟2選取目標節點作為隨機節點xrand,并沿該方向擴展搜索樹直到擴展失敗;若沿目標節點方向擴展失敗,則根據無人機運動軌跡方程來確定xrand,通過改變Δθ的取值,獲取能夠規避威脅的節點xrand。
步驟3根據獲取的新節點xrand擴展隨機樹。根據無人機在水平及垂直方向上的運動軌跡方程生成下一節點,計算其移動代價F,選取移動代價最小的節點作為下一個航跡點。
步驟4連接所有航跡點并進行平滑處理,得到動態突發威脅的重規劃航跡。
3 無人機自主巡檢系統框架
通過無人機巡線軌跡動態規劃,可以保證無人機在巡檢作業中的安全性,為保證巡線結果有效且正常上報給上層系統,實現全過程自主巡檢,還需建立對應的自動化流程框架。無人機自主巡檢流程如圖3所示,其具體過程如下。
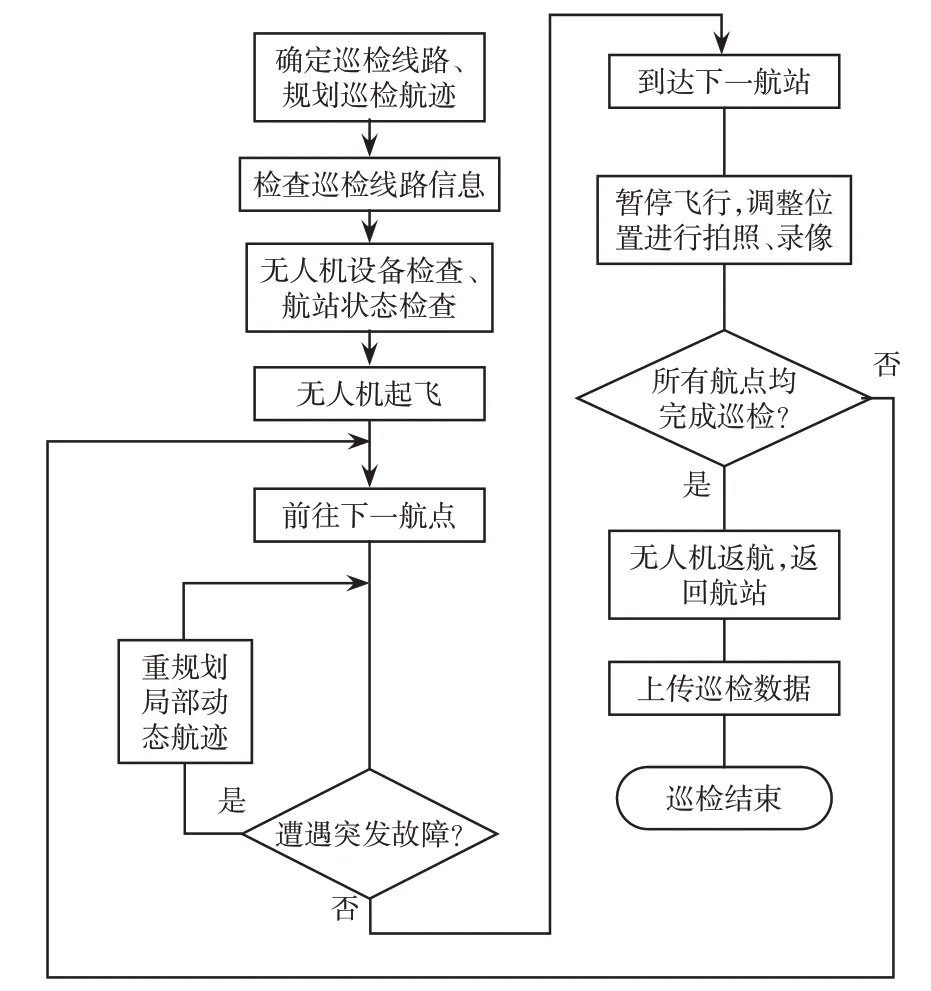
圖3 無人機自主巡檢流程Fig.3 Flow chart of drone autonomous inspection
(1)控制系統接收上層巡檢線路。
(2)檢查巡檢線路信息,確認航線是否過近或過遠;是否包含禁飛區;預估航線總距離、時間和所需電量;是否與其他無人機執行的航線重疊等。
(3)形成航線命令,上傳到無人機飛控
(4)檢查航站狀態、外界氣象狀態和風力風向狀態等。
(5)檢查無人機狀態,檢查各傳感器、動力系統、定位狀態及無人機剩余電量等。
(6)無人機起飛,到達自定高度后開始執行巡檢航線。
(7)到達航點,暫停飛行,調整云臺角度、鏡頭參數并拍照,然后繼續飛行。
(8)所有航線執行完畢后準備返航。
(9)接收到航站完畢信號,到達航站上方降落
(10)降落完成,從云臺相機中下載拍攝的照片,巡檢文件航點對照表。
(11)作業成果上傳
(12)全流程結束。
4 無人機輸電線路巡檢系統應用
基于大疆M300型無人機平臺研發的小型多旋翼無人機自主巡檢系統已于唐山地區電網進行實驗與調試,輸電線路的巡檢效率和無人機巡檢系統可靠性得到了明顯的改善。
無人機自主巡檢體系的結構如圖4所示,由圖4可知,該系統包括管控中心、智能航空站及其布置的無人機構成。管控中心通過同時接收、協調、反饋各無人機之間的信息,以及多航線任務規劃、編隊、任務分配等子系統協調配合,保證各無人機之間的任務分配合理、高效,通過優化航線實現無人機以最短時間完成目標任務;通過集控飛行設備,可實現無人機超視距集控飛行和多智能航空站無人值守作業等。管控中心可同時控制多臺航空站,多臺航空站分別執行不同的命令,顯示圖像可在不同無人機之間進行切換。管控中心采用“自主巡檢+手動飛行”控制模式,對無人機巡檢進行全過程管理,及時應對各類異常報警和故障情況,保障線路和無人機設備的安全。
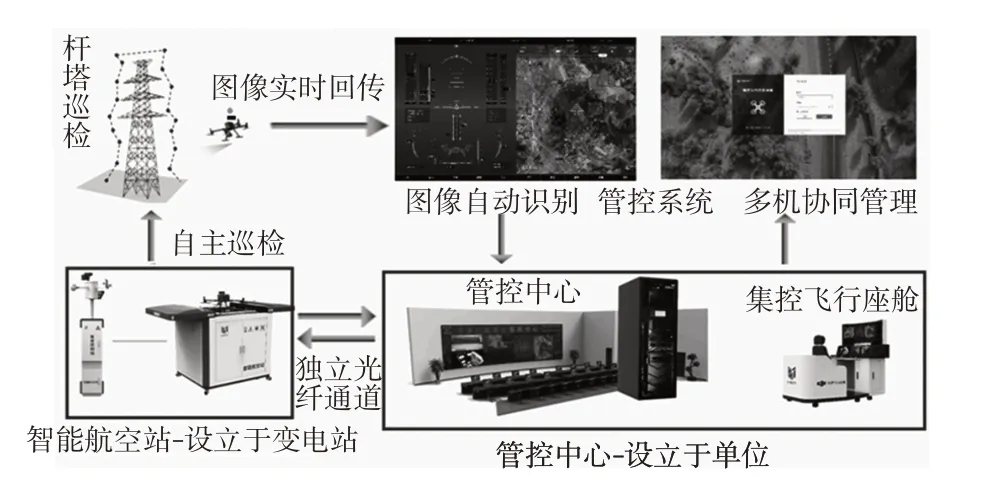
圖4 無人機輸電線路巡檢系統Fig.4 Drone inspection system for transmission line
根據輸電線路重要程度、負荷量等多種因素的考量,部署多個智能航空站,擴大無人機可巡檢范圍,為目標區域規劃合理航線提供支撐。唐山某地區航空站布局示意如圖5所示。
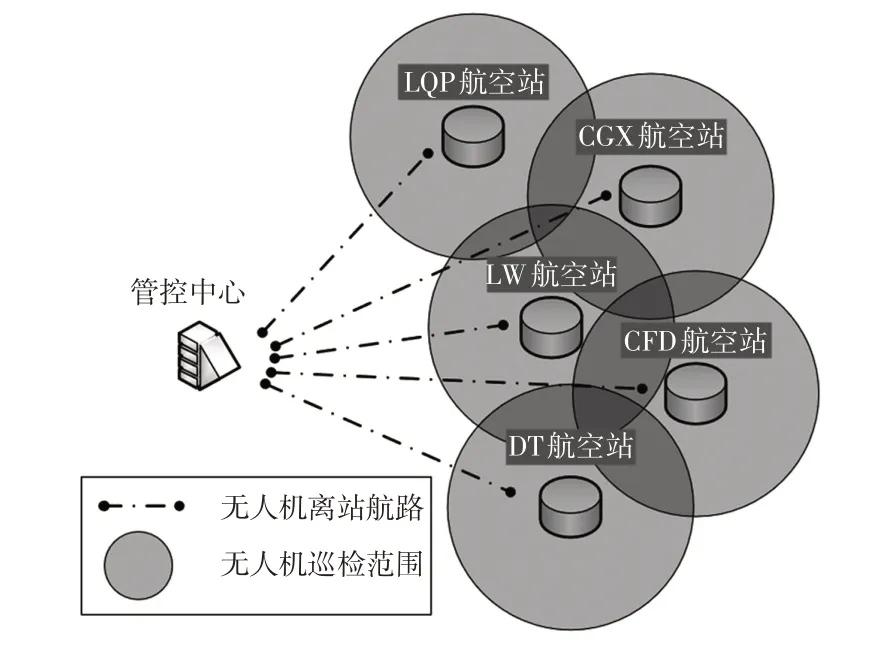
圖5 唐山某地區航空站覆蓋區域示意Fig.5 Coverage area by Tangshan area air terminal
航空站布置在變電站內不影響變電運行的角落或邊緣位置,與變電站距離適中,便于取電,同時航空站上方無線路、設備等遮擋物。航線規劃時,無人機起飛后第一時間駛離變電站,以免相互影響,發生信號干擾,保證設備安全,然后按照航線進行自主巡檢。
在進行自主巡線時,可依托航空站更換無人機的搭載云臺,實現不同功能。搭載紅外光云臺可對桿塔溫度進行監控;搭載激光設備可對桿塔及通道進行點云數據建模。形成以無人機為平臺,紅外光、激光、可見光多光一體的多維度巡檢方案,目標巡檢設備及巡檢方式如圖6、7所示。
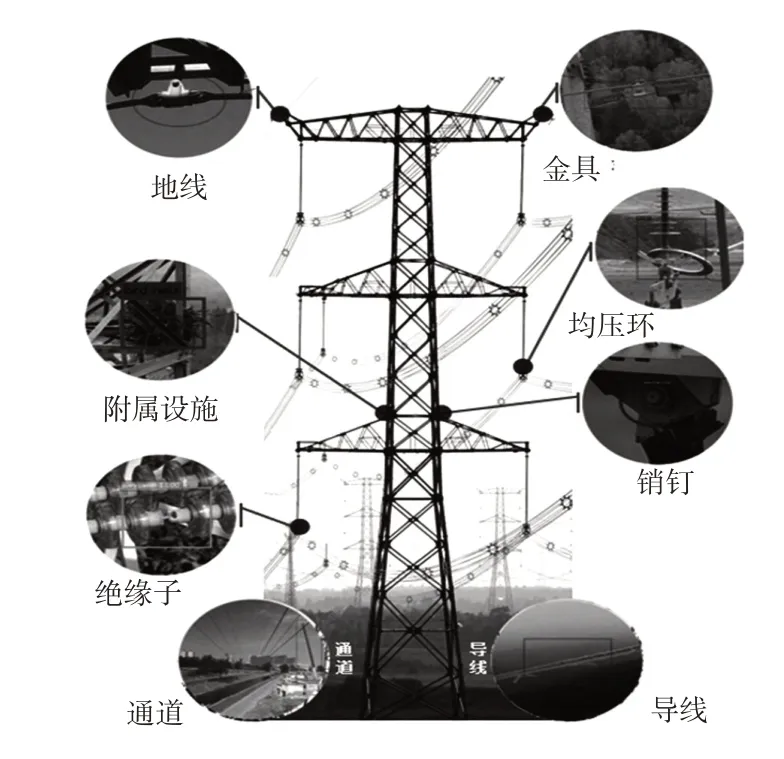
圖6 無人機多維度巡檢方案Fig.6 Drone multi-dimensional inspection program
多維度巡檢方案有效地對桿塔存在的各類常見故障進行分析判斷。通過對同一位置的多次復拍,自動上傳至管控中心數據庫可進行歷史圖像對比,更好地了解設備變化、設備隱患形成的時間點和形成原因,幫助巡檢人員制定檢修方案。
無人機也可改為人工手動控制,對無人機自主巡檢過程中發現的異常設備進行人工判斷,解決人工巡檢很難發現高空隱蔽缺陷和各種通道隱患問題。通過對控制中心進行現場設備狀態、檢修策略等信息的及時掌握,對輸電線路狀態進行有效評價,并與現場圖像視頻相結合等手段,精準定位作業現場和風險點位,實現對所轄范圍內設備和通道運行狀態的綜合管理,從傳統、簡單的業務執行工作模式轉變為“實時分析—判定缺陷—檢修策略”的一崗多能的工作模式。
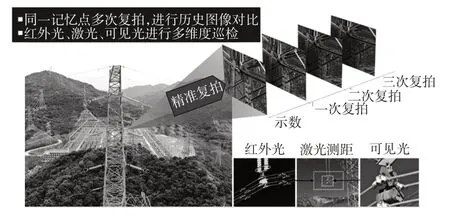
圖7 多時間點桿塔圖像的對比Fig.7 Comparison among multi-point-in-time pole tower images
通過無人機自主巡檢作業替代人工間斷零散的作業模式,基于智能管控平臺進行智能識別,徹底替代人工巡檢模式,實現全天候可持續性作業,單次連續巡檢可達8 架次,連續巡檢時長可達4 h以上,并實現以航空站為中心,覆蓋直徑為14 km的巡檢面;提高了設備抗風險能力,較以往巡檢效率提升了2 倍,同時大大縮短了巡視周期,由原來的每月1 次縮短為每7 d 一次,針對重點線路巡視周期可縮短為1 d。由于巡線航跡誤差精確至米,故規避突發故障百余次,有效提高巡線安全性;同時精細化自主巡檢可利用高空視角更好地發現設備隱患,故障發現率提高100%,確保及時處理,保障線路的安全運行。
不同巡線方式的維護成本及巡檢成本分析如表2和表3所示。其中,采用固定翼無人機巡線,每日可巡檢距離最高且每公里平均成本最低,但因固定翼無人機無法對線路進行精確診斷,容易忽視高空隱蔽缺陷,不適用于日常巡檢;而小型旋翼無人機相對傳統人工巡線方式,可在平原、丘陵和山地區域作業,降低巡線成本32.11%、41.75%和54.30%,遠低于人工巡線成本,且提高了巡線效率;相對中型旋翼無人機降低9.34%、9.17%和23.56%,且日常維護成本更低。
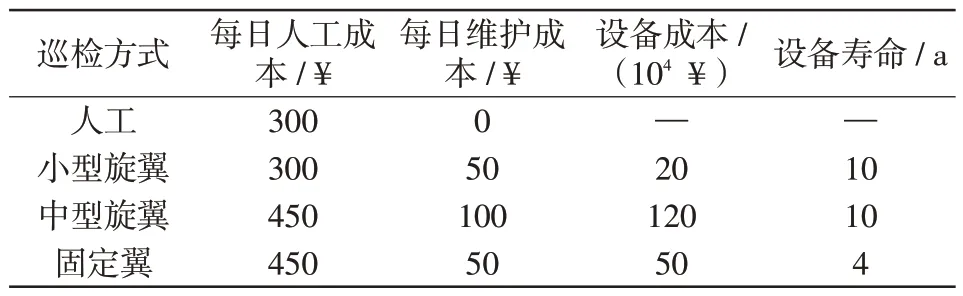
表2 不同巡線方式維護成本對比Tab.2 Comparison of maintenance cost among different inspection methods
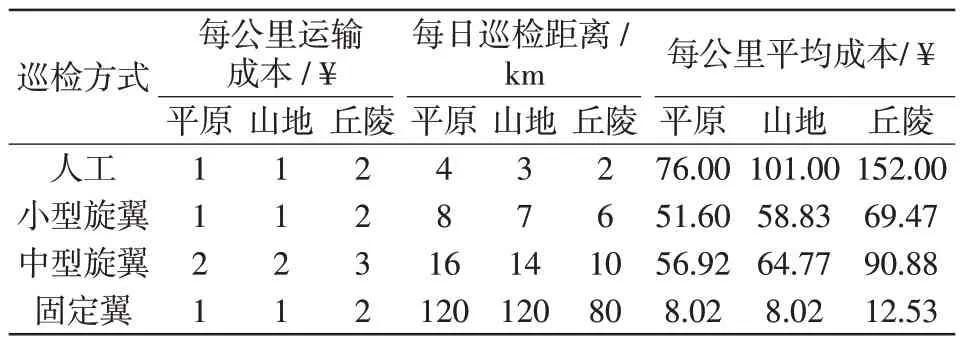
表3 不同巡線方式巡檢成本對比Tab.3 Comparison of patrol cost among different inspection methods
5 結語
本文針對現有小型無人機自主巡線技術的缺點與不足,提出一種基于動態航跡規劃的無人機輸電線路自主巡檢方法,通過規劃全局靜態航跡和局部動態航跡,并引入改進雙向快速RRT算法進行航跡重規劃,提高了無人機自主巡檢過程中的安全性。同時,將多機協同、無人機多維度自主巡檢、圖像智能識別等智能化作業手段進行應用,改變了傳統人工無人機巡檢模式,利用管控中心的圖像實時回傳和智能識別技術,對巡檢信息實時處理、智能甄別,及時發現輸電線路缺陷和隱患,縮短人工巡視時間,提高巡檢效率。通過應用實踐,證明巡檢系統能在保證輸電線路巡檢作業安全性的前提下,提高線路巡檢精度、效率并有效降低巡檢成本。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41