多媒體網絡下數字視頻關鍵幀提取方法
2022-11-01 04:55:22李春華
中國傳媒科技 2022年10期
關鍵詞:多媒體
李春華
(蒙陰縣融媒體中心,山東 臨沂 276200)
導語
現如今,互聯網技術以及計算機關聯平臺的飛速發展,為我國相關行業的進一步創新奠定了堅實的基礎,同時也營造了更加符合新時代發展的社會氛圍。在不同技術的結合與創新背景之下,多媒體以及智能化平臺漸漸走進人們的視野,同時為人們的生活生產提供了便利。[1-2]在多媒體網絡環境中,視頻制作與處理是十分關鍵的工作,同時也是決定日常工作效果關鍵且重要的因素之一。多媒體網絡技術的優化與完善,一定程度上可以加強數字視頻的處理程度。與數字視頻的處理和關鍵幀的提取也存在較為密切的關系。[3]
通常情況下,關鍵幀在視頻播放的過程中并不是固定的,而是隨著幀源的變化發生對應的變化,這也導致提取的范圍也在不斷變化,無法更好地確定應變的方案。在這樣的背景環境之下,需要強化提取的質量和效率,形成更加貼合實際需求的提取結構,以此來確保最終視頻的處理效果。我國傳統的數字視頻關鍵幀的提取方法主要是根據關鍵幀的種類做出應對的,通常情況下,視頻的應用關鍵幀可以劃分為以下兩個種類,一種是靜態關鍵幀,另一種是動態關鍵幀。[4]兩種關鍵幀在提取的過程中需要的條件與環境也是不同的。一般靜態視頻關鍵幀只被應用在靜止的多媒體鏡頭之中,用于處理、修改、優化靜態鏡頭的呈現效果,同時幫助視頻穩定畫面,具有一定的維穩作用。動態關鍵幀在提取的過程中對鏡頭的要求也是十分嚴格的,一般被應用在變動的視頻之中,提取時會根據鏡頭內視頻變化幀的導入程度,依據特殊的格式與將動態的鏡頭分割對應尺寸的小型鏡頭,從而利用動態提取法獲取到每一個分鏡頭的關鍵幀。
這些傳統的方法雖然可以完成視頻關鍵幀的提取,但是在多媒體的網絡背景下,并不能完全適應使用的結構依據程序,反而產生較多的問題和缺陷,給數字視頻關鍵幀的提取形成一定的阻礙。[5]因此,需要對多媒體網絡下數字視頻關鍵幀提取方法進行設計與創新。在較為真實的環境下,創建貼合實際的提取環境,加強對數字視頻的提取模式與方法,結合視頻處理的需求,創建更加靈活豐富關鍵幀提取方法,結合互聯網、大數據技術,最大限度地降低提取誤差的出現,擴大整體的應用范圍,提升整體的提取效果。
1.多媒體網絡下數字視頻關鍵幀提取方法設計
1.1 進行數字視頻關鍵幀聯合熵數值確定
在對多媒體網絡下數值視頻關鍵幀提取方法設計之前,需要先確定聯合熵數值的相應數值。通常情況下,在提取關鍵幀的過程之中,存在一個二維的隨機聯合變量,這個變量則是聯合熵,聯合熵數值的變化一定程度上決定著關鍵幀的執行距離,同時對提取的效果也會產生對應的影響。[6]所以,在提取的過程中,可以設定一個聯合熵的嫡值變化表,先確定實際的提取范圍,進行序列幀數值的確定,具體如下表1所示:
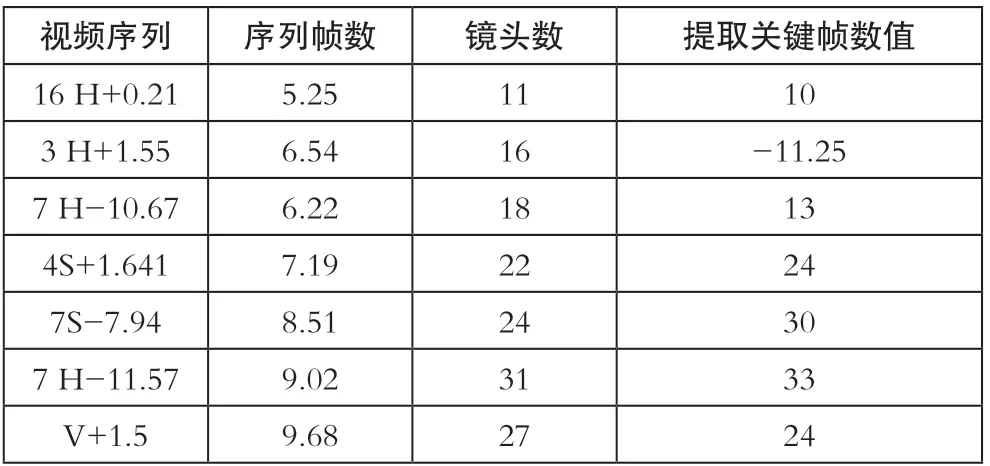
表1 序列幀數值變化表
根據表1中的數據信息,最終可以完成對序列幀數值的設定。接下來,根據序列的變化來計算出幀數的數值,具體如下公式1所示。

公式1中:T表示序列幀數值,λ表示相鄰幀距離,a表示飽和函數,y表示允許出現的最大誤差,通過上述計算,最終可以得出實際的聯合熵數值,完成計算,為后續的提取工作奠定基礎。
1.2 EMD距離控制
在完成對數字視頻關鍵幀聯合熵數值的確定之后,接下來需要進行EMD距離的實時控制。EMD距離實際上指的是對關鍵幀的提取,利用分布差異度來獲取幀數的變化距離,最終實現高分布的應用控制。但是EMD距離的控制對最終提取的效果也存在一定的影響。首先,需要先計算出分布差異存在的誤差距離,如下公式2所示:

公式2中:D表示誤差距離,φ表示變化幀數向量,ω表示特征提取范圍,通過上述計算,最終可以得出實際的誤差距離。在上述的誤差距離范圍下,計算出EMD距離,并加強控制,如下公式3所示:

公式3中:M表示EMD距離,E表示聯合熵二維變化差值,?表示控制程度。通過上述計算,最終可以得出實際的EMD距離,完成提取控制。
1.3 多媒體網絡下自適應提取模型創建
在完成EMD距離的控制后,需要進行多媒體網絡下自適應提取模型的構建。[7]首先依據實際的提取需求,進行自適應結構的設計,采用多層級的網絡處理模式,將提取的層級劃分為初始層級、分析層級以及提取層級,每一個層級的作用均不同,且相互獨立,具有一定的應用價值。但是在實際應用的過程中,也同時存在不同的聯系。
所以,根據自適應提取的范圍,將不同的提取畫面或者圖像劃分在不同的層級之中,建立自適應比照體系,對于數字視頻的分割需要前后做出對比,并獲取存在的提取誤差,根據特定的提取模式,依據誤差,結合自適應提取結構,創建初始的提取模型。[8]但是需要注意的是,需要將提取的模型與多媒體網絡相關聯,統一模型的提取次數與網絡的處理次數,形成高度適應的關鍵幀提取模式,利用網絡將模型得出的結果進行整合優化,進一步完善模型的應用效果。
1.4 聚類法實現多媒體網絡下數字視頻關鍵幀提取
在完成對多媒體網絡下自適應提取模型創建后,接下來,采用聚類法實現多媒體網絡下數字視頻關鍵幀提取。需要先對聚類提取范圍進行設定,同時結合多媒體網絡的數據處理模式,將視頻中的關鍵幀依照互聯網的格式導入處理系統之中,完成之后,將互聯網格式整理為聚類模式,利用聚類提取模式將關鍵幀的數據進行整合與匯總,結合自適應的提取模型,最終完成對多媒體網絡下數字視頻關鍵幀的提取。[9]
2.方法測試
本次測試主要是對多媒體網絡下數字視頻關鍵幀提取效果進行驗證與分析。測試主要劃分為三個小組,一組為傳統的應變描述提取法,將其設定為傳統應變描述提取測試組;一組為傳統的聚類特征提取法,將其設定為傳統聚類特征提取測試組。最后一組為本文所設計的多媒體關鍵幀提取方法,將其設定為多媒體關鍵幀提取測試組。三組方法在相同的環境之下同時進行測試,并將最終得出的結果對比分析,完成測試。
2.1 測試準備
在進行測試之前,需要做相應的測試準備,同時搭建相對應的測試環境。選取一個多媒體網絡作為測試的主要環境。準備一段視頻作為測試的主要目標對象。進行數字視頻的預處理,進行姿態提取范圍的估計,并計算視頻關鍵幀的網絡姿態范圍變化值,具體如下公式4所示:

公式4中:K表示關鍵幀的網絡姿態范圍變化值,β表示應變幀源距離,t表示姿態估計值。通過上述計算,最終可以得出實際的關鍵幀的網絡姿態范圍變化值。利用得出的數值,明確設定對應的提取范圍。將視頻的處理范圍與關鍵幀變化的范圍協同一致,利用初始的提取流程,并在多媒體網絡之下,進行提取極限值的計算,具體如下公式5所示:

公式5中:H表示提取極限值,e表示提取極限范圍,i表示提取次數,d表示變化單幀距離。通過上述計算,最終可以得出實際的提取極限值。根據得出的相關數據信息,進行初始測試提取模型的創建,并依據視頻的處理需求,進行關鍵幀預設標準的設定,具體如下表2所示。

表2 關鍵幀預設標準設定表
根據表2中的數據信息,最終可以完成實際的關鍵幀預設標準的設定。隨后,將提取過程中添加上述的標準,加強單幀運行計算的實際精準性以及可靠性。結合多媒體網絡,在提取模型之中建立多媒體視頻處理幀數量控制環節,根據視頻幀數不同的運動向量,提取出關鍵幀獨有的運動特征,形成特征曲線,并利用特征曲線來判別關鍵幀的實際運動距離,同時計算出局部提取極值點,具體如下公式6所示:

公式6中:P表示局部提取極值點,?表示變化運動向量,C表示單幀特征指數,X表示特征編碼。通過上述計算,最終可以得出實際的局部提取極值點,將其設定在測試的視頻關鍵幀提取模型之中,完成對測試環境的搭建與預設。核查測試設備是否處于穩定的運行狀態,并確保不存在影響測試結果的外部因素,核查無誤后,開始測試。
2.2 測試過程及結果分析
在上述所搭建的測試環境之中,開始具體的測試。首先,將選取的目標測試視頻依據特定的格式以及需求,分割成不同范圍的小視頻塊,通常情況下,比照每幀圖像96×72像素為標準,如果過大,則會影響單幀的運行聚焦點,過小也無法滿足提取的條件,增加提取的復雜度,使提取的效果受到影響的同時,還會造成大面積的關聯提取誤差的出現。[10]設置R=C=6,每一個視頻分割塊的大小均為32×20像素,為了確保測試結果的準確可信性,測試所使用的視頻或者圖像均設置為灰度,并且灰度值保持一致。利用提取模型將視頻的分割塊依次操作提取,設定提取極限值為-1.25和+12.74,分割次數為26次,最終得出測試的結果,對其進行對比分析,如下表3所示:
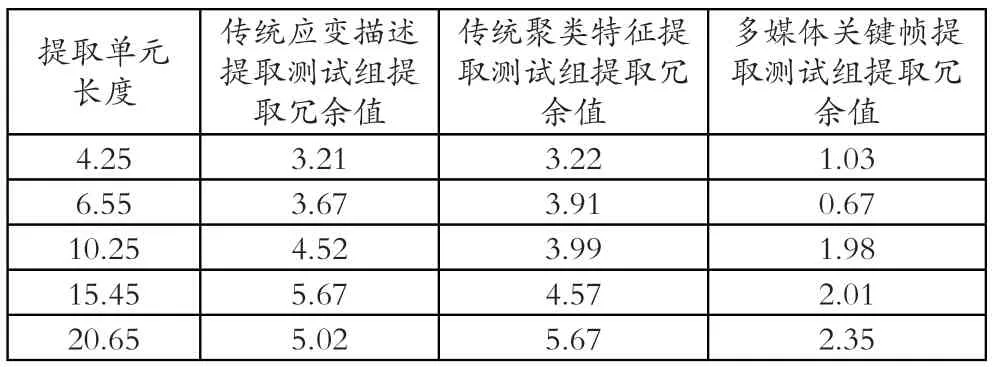
表3 測試結果對比分析表
根據表3中的數據信息,最終可以完成對測試結果的對比與分析:在不同的提取單元長度情況下,對比傳統的應變描述提取測試組以及傳統聚類特征提取測試組,本文所設計的提取方法最終得出的提取冗余值相對較低,表明在多媒體網絡背景下,數字視頻的關鍵幀提取效果更佳,具有實際的應用價值。
結語
綜上所述,便是對多媒體網絡數字視頻關鍵幀提取方法進行的設計與分析。其實,傳統的視頻關鍵幀提取方法雖然可以完成預期的任務,但是并不能處理提取過程中相對細節的問題,對存在的異常情況,也不能更好地解決。而對比傳統的方法,本文所設計的提取方法相對靈活,并且可以將相鄰幀的相關性保持最大化,設立多層級的提取目標,在關鍵幀的變化范圍之內,利用多媒體網絡,實現層級控制處理,以此確定鏡頭關鍵幀的數量和位置,擴大提取的實際范圍,進而提升整體的提取效果,增強關鍵幀變化的穩定性,促使相關技術邁入新的發展臺階。
猜你喜歡
名師在線·上旬刊(2021年3期)2021-09-10 04:20:48
甘肅教育(2020年21期)2020-04-13 08:09:26
電子制作(2019年22期)2020-01-14 03:16:28
時代人物(2019年29期)2019-11-25 01:35:20
消費導刊(2018年10期)2018-08-20 02:56:28
中國教育技術裝備(2016年11期)2016-12-01 06:52:45
網絡空間安全(2016年3期)2016-06-15 20:27:08
中小學電教(2016年3期)2016-03-01 03:40:51
河南電力(2016年5期)2016-02-06 02:11:40
中國教育技術裝備(2015年21期)2015-03-11 20:16:04
