基于斜射式線結構光的隧道錯臺快速檢測技術
2022-11-02 08:52:52劉新根陳瑩瑩李明東
重慶交通大學學報(自然科學版) 2022年10期
劉新根,陳瑩瑩,李明東
(1.上海同巖土木工程科技股份有限公司,上海 200092;2.上海地下基礎設施安全檢測與養護裝備工程技術研究中心,上海 200092)
0 引 言
隨著隧道施工技術的發展和技術標準的提高,錯臺引起的防水隱患、管片開裂等問題逐漸凸顯,一種病害的發生會加劇其他病害發展,嚴重的將會影響隧道使用功能[1]。為保障隧道結構安全,須定期或者不定期對隧道錯臺量進行檢測,以便及時進行性能模型的建立[2],提供預防性防護時機和建議。
近年來,國內外學者在不斷探索錯臺檢測方法,常用方法有人工檢測法和自動檢測法[3]。人工檢測法速度慢,影響隧道正常運營,且采樣點數量有限,難以客觀評價錯臺情況。自動檢測法也有大量研究,K.WANG等[4]提出了一種基于特定峰值的試探算法,采用掩膜濾波器和模板匹配算法,從刻槽、錯臺和裂縫的數據中識別出錯臺;孫朝云等[5]設計了激光錯臺三維檢測系統,分析錯臺三維高程數據直方圖的雙峰特性,實現閾值的自動確定和平均錯臺量的計算;李偉等[6]、王子彬等[7]均利用激光三角測量原理,對得到的路面高程數據進行分析處理。
結構光測量系統因精度高、非接觸、抗干擾等特點被廣泛應用[8],對結構光測量系統標定,已有大量研究。I.SOBEL[9]利用精確制造的三維標靶進行標定;R.Y.TSAI[10]提出經典的兩步法,將標定目標簡化為二維;Z.ZHANG[11]通過二維棋盤格標定板校準相機,所用的棋盤格能夠放置成任意姿態;解則曉等[12]提出線結構光傳感器內外參數同時標定的方法,通過標定點計算內外參數。
使用結構光進行錯臺計算的核心在于結構光條紋中心的提取,提取精度將直接影響最終檢測結果精度[13]。常見的中心提取方法有邊緣法、重心法、極值法、方向模板法、高斯擬合法以及Hessian矩陣法等[14]。蔡懷宇等[15]提出一種基于主成分分析法提取光條紋中心,對條紋灰度分布函數在法線方向進行二階泰勒展開求得條紋中心的精確位置;余樂文等[16]提出一種基于線結構光的三維測量系統,利用幾何數學模型計算物體三維坐標;李瑛等[17]提出基于改進方向模板法的結構光中心線提取算法,采用雙邊濾波進行降噪、二值化和邊緣檢測;楊鎮豪等[18]提出一種將極值法與Steger方法相結合的改進算法,由極值法快速得到光條中心點粗略位置以及感興趣區域(ROI),再分段使用Steger法精確提取光條亞像素位置,但計算復雜度高。
針對上述文獻算法檢測速度慢、檢測精度低、測量系統標定不易等不足,筆者提出基于斜射式線結構光的錯臺快速檢測方法。明確錯臺量倒數與像素位移量倒數間的線性函數關系,推導出理論公式;結合目標檢測算法Yolo-v3、圖像梯度特征和最大類間方差法(OTSU)提取光條區域輪廓,使用灰度平方加權重心法和距離公式獲得像素位移量;通過室內試驗以及工程案例進行對比驗證,以期為隧道錯臺自動檢測提供有效理論參考。
1 研究方法
1.1 測量原理
在光路結構中,投射在物體表面的入射光和反射光的光路形成了三角形,其輸入和輸出間關系可通過三角形相似原理確定,待求的距離可由光斑在相面成像中心位置的幾何關系計算[19]。
按照激光入射角的不同,激光三角法可分為直射式激光三角法和斜射式激光三角法。考慮到實際工程應用情況,筆者采用斜射式激光三角法,如圖1中,入射光線與基準平面法線成一定角度θ1,反射光線與基準平面法線的夾角為θ2,相面與透鏡夾角設為θ,h表示錯臺量,B1點到接收透鏡的距離為L1,B′1點到接收透鏡的距離為L2,x′表示像元位移。
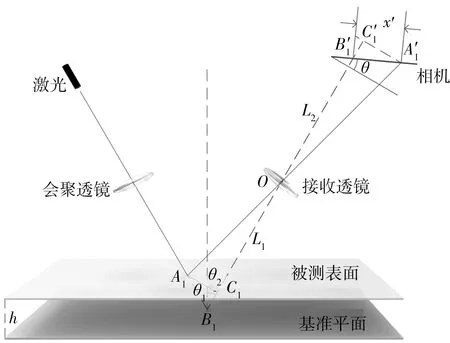
圖1 斜射式激光三角法
對應函數關系式為:
(1)
整理可得:
(2)
1.2 錯臺量理論公式
依據成像原理,x′=mμ,其中,m為像素位移量,μ為相機像元大小,L2為焦距f。可得:
(3)
式(3)中,實際錯臺量h的求解與m、L1、f、μ以及角度θ1、θ2、θ等多個參數變量有關,涉及參數變量過多。在實際數據采集過程中,L1可由激光測距儀獲得,但角度難以測量,若粗略測量會嚴重影響錯臺檢測的精度。
為解決這一難題,對式(3)中涉及的角度變量進行分離,使得錯臺量h的求解無需對角度進行考慮,既達到簡化參數標定過程,又能提高錯臺檢測精度的效果,整理如式(4):
(4)
假設sin(θ1+θ2)/(cosθcosθ1)=K,cos(θ1+θ2-θ)/(cosθcosθ1)=J,則式(4)可轉換為:
(5)
由式(5)可知,實際錯臺量h的倒數與像素位移量m的倒數成線性函數關系。
為精確得到參數變量K、J,使用RANSAC算法[21]對式(5)進行線性函數關系的擬合逼近。RANSAC算法以Ax+By+C=0的形式進行直線的擬合。假設f/(mμL1)=x,1/h=y。則式(5)與Ax+By+C=0 聯立,可得到參數變量K=-A/B,J=C。
得到參數變量K、J,后續圖像處理得到像素位移量m后,最終得到實際錯臺量h理論公式(6):
(6)
1.3 光條圖像亞像素位移量計算
筆者在前期研究中,利用傳統算法直接基于整張圖片定位錯臺區域,但實際工程應用中環境復雜,包含較多干擾物,比如線纜、污漬、金屬等,且光條與背景對比度不明顯,傳統算法對于干擾物設定的剔除條件有限、自適性差。因此,引入Yolo-v3算法進行錯臺區域定位去除干擾,將光條圖像處理區域縮小,使后續光條中心點提取和像素位移量計算更為精準。
1.3.1 Yolo-v3網絡定位
為滿足實際工程中較高的檢測速度和精度要求,采用具有代表性的Yolo-v3算法[22]進行錯臺區域定位。
Yolo-v3的主干網絡采用Darknet53進行特征提取,并采用類似FPN[23]的上采樣和融合做法,將底層特征與上層特征融合,使特征圖具有更多的特征信息,在3個尺度的特征圖上進行類別預測以及位置回歸預測。Yolo-v3同時對圖像中的目標框進行k-means聚類,獲得9個大小不同的先驗框,然后將先驗框均勻的分給3個尺度的特征圖,小尺度特征圖采用大先驗框,大尺度特征圖采用小先驗框,目標檢測準確率可得到提高[24]。
網絡將輸入的圖像分成多個部分,通過深度網絡判斷每個部分是否包含目標錯臺,并給出預測的邊界框,檢測效果如圖2,定位到的錯臺區域是后續光條圖像處理的前提條件。
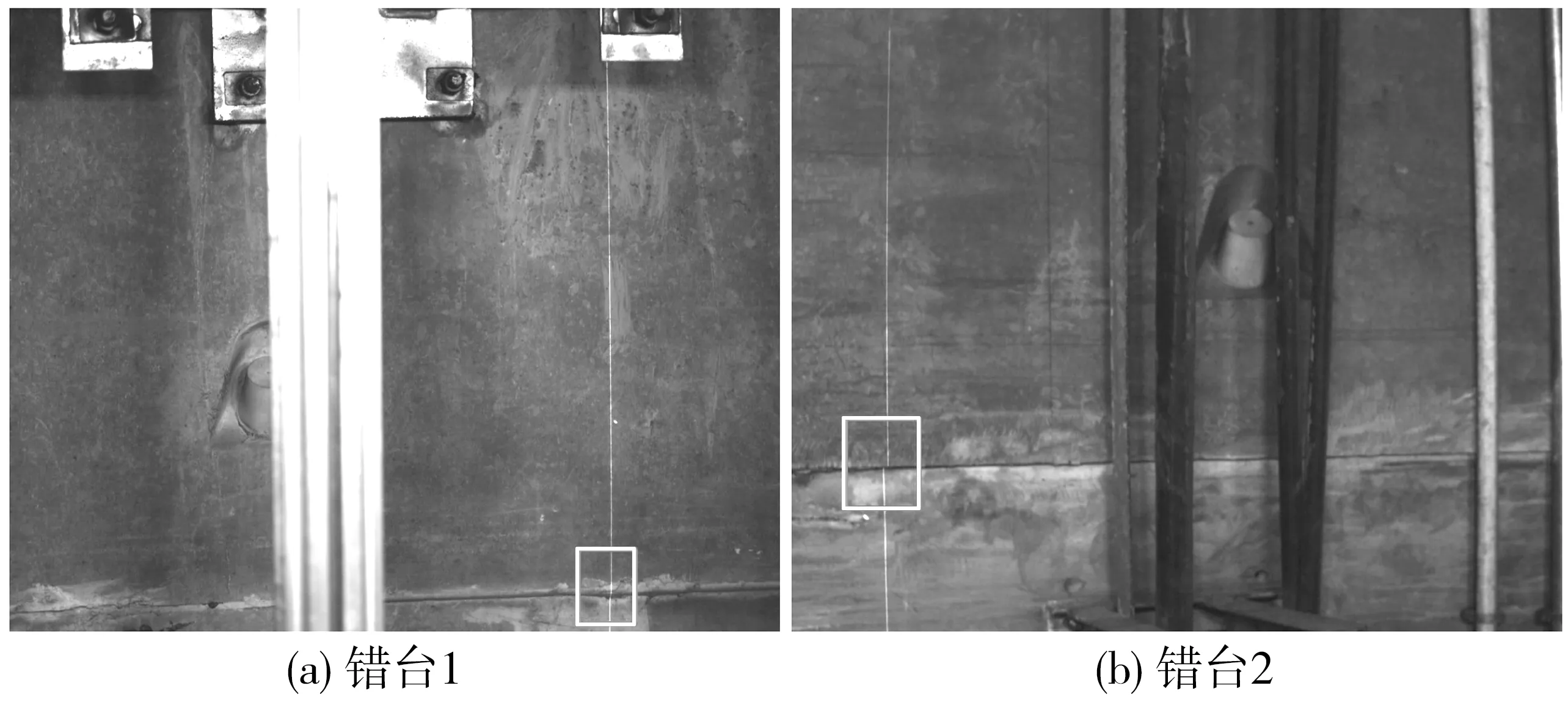
圖2 錯臺區域定位
1.3.2 光條中心點提取
采用灰度平方加權重心法提取光條中心點,能夠提高光條區域部分像素灰度值對光條中心點計算結果的權值,使被測物體表面不連續、反射不均勻及背景光照不均等因素造成的影響減小,且光條中心點提取精度達到亞像素級,計算如式(7):
(7)
式中:G為原始圖像;x1為圖像列坐標;j為圖像行坐標;G(x1,j)為原始圖像上點(x1,j)的灰度值;S為光條區域;uj為原始圖像第j行光條中心點列坐標。
要計算光條中心點的列坐標uj,重點是需要定位出光條所在區域S。文獻[14]直接采用最大類間方差法(OTSU),其認為結構光圖像對比度高,該方法能很好的區分光條和背景,且無需人工干預,自適應性強。
盡管通過Yolo-v3定位出錯臺區域,去除絕大部分干擾,但實際工程中環縫表面不平滑,存在斑塊等干擾,如圖3(a);若直接對使用OTSU分割,如圖3(b)則無法提取光條區域;因此,基于光條水平方向梯度特征,對圖像水平方向上進行卷積操作,卷積核如式(8),獲得較為清晰的光條梯度檢測,如圖3(c);再使用OTSU對梯度圖像二值化分割,同時進行形態學處理得到目標光條,如圖3(d)。
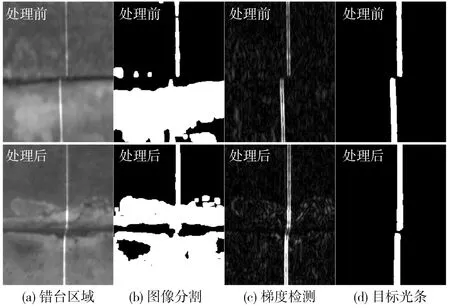
圖3 光條分割
(8)
當分割出目標光條之后,將圖像每行像素點灰度值發生突變的位置作為光條區域的候選位置,考慮到圖像中可能存在干擾點,結合光條先驗知識進行篩除,最終確定出光條區域。算法步驟如下:
步驟1:原始圖像G通過Yolo-v3算法檢測到錯臺區域,進行圖像水平方向梯度檢測、OTSU二值分割和形態學處理操作,得到二值圖T。
步驟2:遍歷圖像T第j(j=1,…,n)行所有列,當某像素點與相鄰像素的灰度值產生突變,將該點作為候選坐標點,即像素間灰度差值滿足條件|T(i,j)-T(i-1,j)|=255。
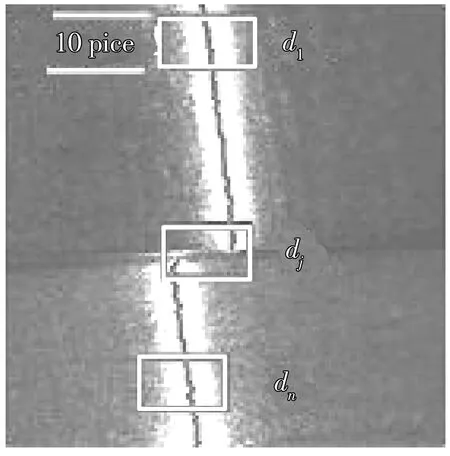
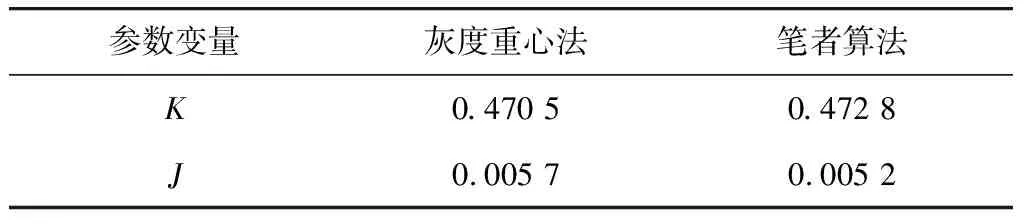
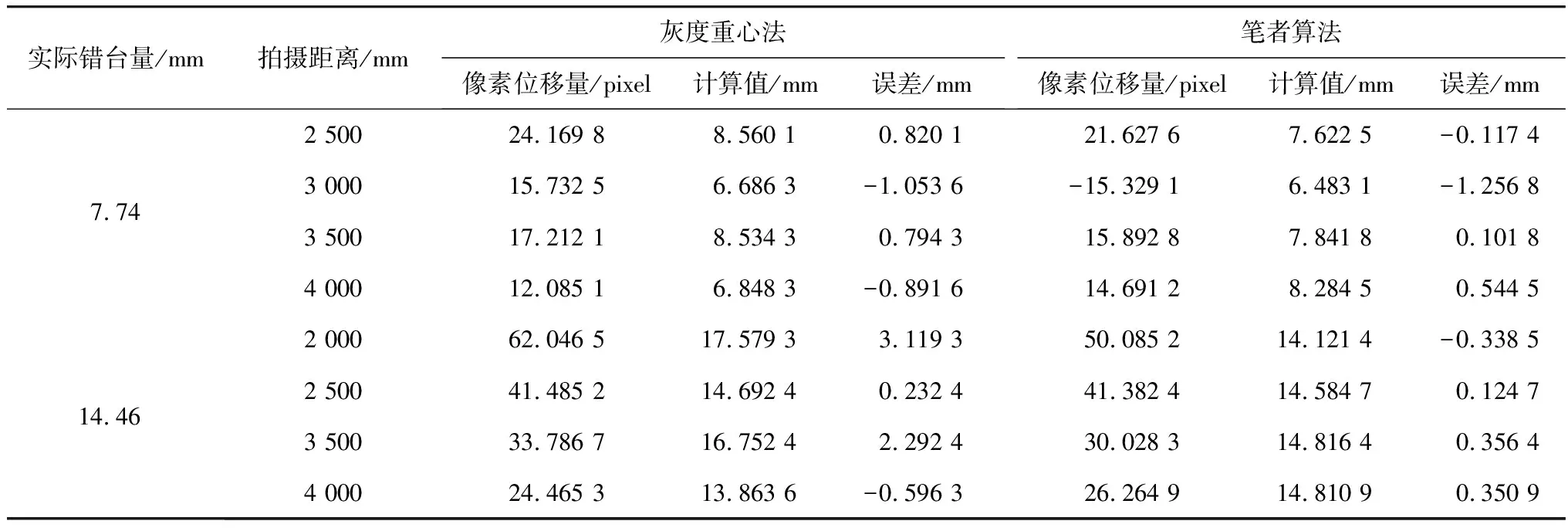
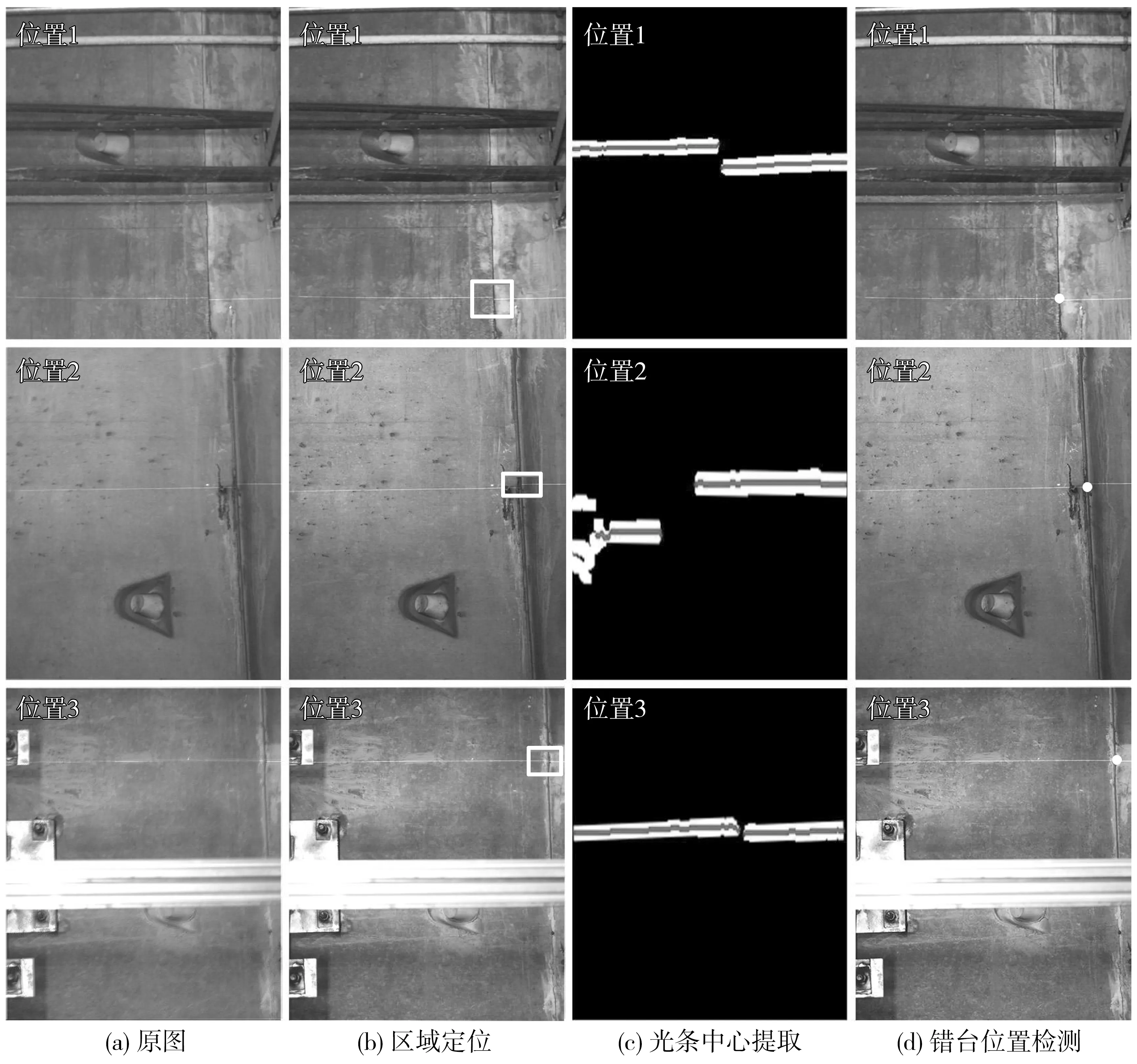
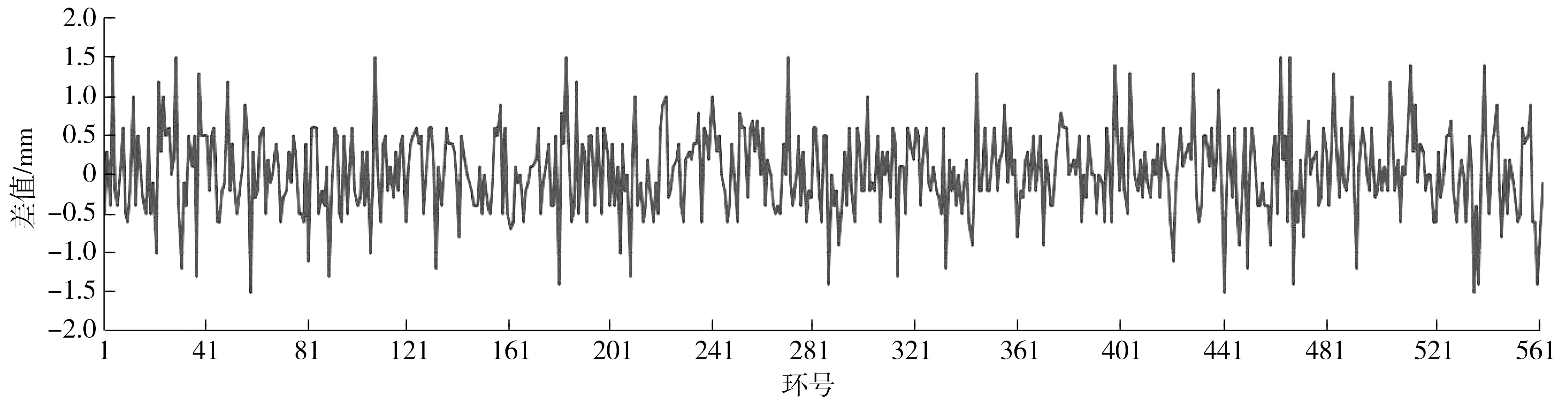
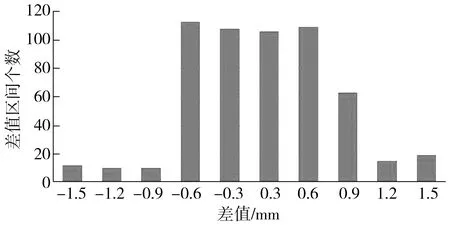
步驟3:對每兩個候選點的列坐標進行差值計算,當最大差值Dmax滿足條件Tmin 步驟4:重復步驟2、3,直至遍歷完圖像所有行,得到光條完整區域。 將定位后的區域進行光條區域提取和中心點計算,效果如圖4。 在圖4(b)中圖像分割后存在白圈中所示獨立的噪點,但不會對光條區域范圍的定位造成影響。確定光條區域后,再根據式(7)計算得到亞像素級中心點坐標,如圖4(c),由圖4(c)可以看出,不論是亮度分布不均、較離散的光條,或者質量較好的光條,筆者算法都能排除干擾,對光條中心點精確提取,便于進一步計算像素位移量。 圖4 光條中心點提取 1.3.3 像素位移量計算 為獲取像素位移量,對光條拐點進行定位,基于最小二乘法擬合光條直線參數,并依據距離公式求取像素位移量。算法實現步驟如下: 步驟1:針對已獲取的光條中心點坐標,每隔n行進行中心點列坐標差值計算,中心點坐標如圖5中光條中間線。 圖5 差值計算 光條拐點處中心點列坐標與前面n行的中心點列坐標存在較大偏差。經過筆者多次試驗,設置n=10,即對光條區域從上往下按行掃描,計算當前j行與前面第j-10行光條中心點列坐標的差值dj,其中,dj=|xj-xj-10|,j=10,11,…,n-1。 步驟2:求取最大列坐標差值dj對應的行號j,將光條分割成兩部分,記為光條拐點。 步驟3:基于最小二乘法擬合直線參數。 步驟4:基于距離公式計算兩直線間的距離,即像素位移量。 (9) 式中:(x0,y0)為一擬合直線上的任意一點;A、B、C為另外一擬合直線系數;m為兩直線間的距離,即像素位移量。 基于Visual Studio 2015開發環境、OPENCV圖像庫、Darknet網絡框架,在配置有GTX1660 GPU的電腦上對隧道環境以及實驗環境下采集的圖像進行數據處理、模型訓練以及結果分析。 使用LabelImg對實際采集的數據進行標注,錯臺區域作為檢測目標,其余均是背景,只需2個類別標簽,即:target、background。數據集共有15 255張圖像,以8∶2的比例隨機選取數據集中的圖像作為訓練數據和驗證數據,共進行30 000次迭代訓練,初始學習率為0.001,批量大小為16。基于C++實現Yolo-v3算法的調用,將置信度設為0.5用于類別判斷,對輸入的圖像進行錯臺區域檢測。 對6 780張圖像進行錯臺定位批量檢測,驗證模型定位效果。實驗圖像包含1 512張錯臺,正確檢測到1 472張,定位準確率可達97.35%,僅40張圖像檢測錯誤,誤檢率為2.65%,模型定位效果可靠。 為驗證所提光條中心提取算法的有效性,用極值法、Steger法、灰度重心法和筆者算法,對不同情況圖像提取光條中心進行對比分析,如圖6。 圖6(a)中,極值法提取的光條中心遠偏離實際光條中心且中心線不平滑,該方法通過遍歷圖像,將最大值點做為光條中心,提取效果差,不適用于光條較離散、質量較差的圖像;Steger法和灰度重心法對亮度均勻、質量較好的光條,提取的中心線較準確,如圖6(b)、圖6(c)中的位置1、位置3處理效果較好,但個別光條中心點會產生偏移,也如圖6(b)和圖6(c)中的位置2,光照分布不均勻,存在干擾點,出現大量中心點提取錯誤的現象。 圖6 對比試驗 筆者算法如圖6(d),對光條亮度均值、質量好或者光條離散、質量較差的圖像,均能準確進行光條中心點的提取,得到平滑的中心線,并且對圖像中存在的干擾點能夠避除,使中心點的提取不會產生偏差,驗證了算法的魯棒性。錯臺檢測中,光條中心點提取是算法耗時的核心,在筆者實驗硬件平臺上,每秒能處理26張圖像,數據處理速度快。 實驗過程中,通過手動測量錯臺驗證算法檢測精度。已知錯臺厚度分別為7.74、14.46 mm。對于同一錯臺,進行多角度、多距離的拍攝實驗,拍攝角度范圍為0~50°,拍攝距離范圍為2 000~4 000 mm,相機參數設置f=75 mm,μ=0.005 mm。 對采集的N組光條圖像進行位移計算,獲得對應像素位移量,記為M,其中M∈[m1,m2,…,mN];然后從中隨機選取a組作為標定數據,利用RANSAC算法線性擬合參數變量。 對同一批數據分別使用極值法、Steger法、灰度重心法和筆者算法進行錯臺量檢測。經上述光條中心點提取試驗可知,極值法和Steger無法準確提取光條中心點,光條中心點產生極大偏移,無法用于后續計算,因此將計算相對準確的灰度重心法與筆者算法檢測結果進行比對,結果如表 1。 表1 參數變量計算結果 得到參數變量K、J后,對剩余的N-a組數據利用式(6)進行實際錯臺量的計算。兩種錯臺在不同拍攝距離下,經灰度重心法和筆者算法得到的部分錯臺檢測結果如表 2。 表2 錯臺量計算值與實際值對比分析 由表 2可知:同一錯臺在相同拍攝距離下,灰度重心法產生的檢測誤差基本都大于筆者算法;灰度重心法的最小絕對誤差為0.232 4 mm,最大絕對誤差為3.119 3 mm,近50%數據的檢測誤差在0.5~0.9 mm之間,62%的絕對誤差在1 mm內;筆者算法最小絕對誤差為0.101 8 mm,最大絕對誤差為1.256 8 mm,近50%數據的檢測絕對誤差在0.3~0.6 mm之間,87%的絕對誤差在0.6 mm內,誤差范圍顯著縮小,檢測精度在1.5 mm內。 筆者研究成果已集成于上海同巖土木工程科技股份有限公司研制的地鐵隧道結構檢測車TDV-S上,利用檢測車對西南某地區地鐵10號線某一區間,使用高清工業相機和結構光,對同一環布設3個檢測點進行連續測量,對采集到的數據進行算法驗證。多個檢測點的實際效果圖7。 圖7 工程案例檢測結果 由圖7(a)可以看出,實際工程環境采集到的圖像中,結構光條與背景對比度不明顯,成像效果沒有試驗圖像理想。圖7(b)中,通過Yolo-v3算法實現了錯臺區域精準定位。雖然錯臺區域表面不平滑,存在水跡、斑塊等多種干擾,但經筆者算法處理,能夠從檢測到錯臺的區域中準確提取到光條中心點,并剔除干擾點,如圖7(c)。最終,能夠準確定位到錯臺的實際發生位置,如圖7(d)。 選取多個檢測點環境下共561環管片進行批量測試,錯臺量計算值與實際測量值間差值分布曲線如圖8。從圖8中可知,差值落在[-1.5 mm,+1.5 mm],即最大絕對誤差為1.5 mm,絕大部分差值落在[-0.5 mm,+0.5 mm]及其附近。 圖8 管片錯臺差值分布曲線 差值區間個數統計柱狀圖如圖9,差值落在[-0.3 mm,+0.3 mm]、[-0.6 mm,+0.6 mm]、[-1.5 mm,+1.5 mm]的占比,分別為:37.88%、86.90%、100%,即87%的絕對差值在[0,0.6 mm],工程應用結果表明算法精準性。 圖9 差值區間個數統計 基于斜射式線結構光技術進行了隧道錯臺檢測研究,重點分析實現了錯臺量計算理論公式推導和圖像亞像素位移量的計算方法。研究結果及工程案例表明: 1)基于斜射式激光三角法原理和成像原理,推導出錯臺量理論公式,通過RANSAC擬合線性函數,無需角度測量,現場標定更便捷。 2)通過Yolo-v3錯臺區域定位檢測,圖像水平方向梯度檢測和OTSU分割等處理得到目標光條,利用灰度平方加權重心法提取亞像素級光條中心點,算法定位準確率可達97.35%,計算效率每秒26張圖像,計算精度高、易實現、處理速度快,適用于隧道錯臺自動檢測。 3)錯臺檢測結果與實際測量結果87%的絕對誤差在0.6 mm內,最大絕對誤差不大于1.5 mm,滿足盾構隧道錯臺檢測需求。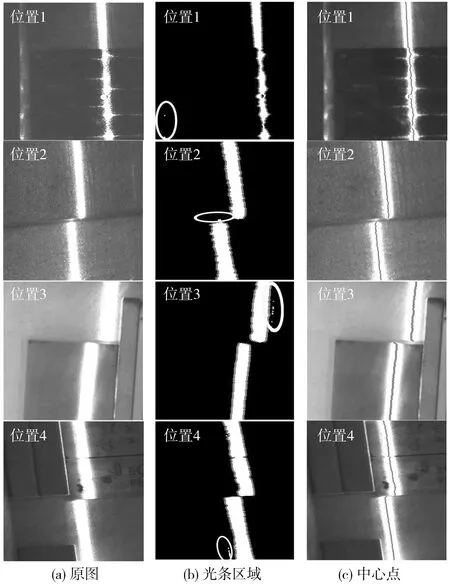
2 實驗結果分析
2.1 Yolo-v3網絡定位
2.2 光條中心提取

2.3 錯臺量計算
3 工程案例
4 結 論
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44