基于狀態(tài)感知的UGV H∞事件觸發(fā)路徑跟蹤控制
2022-11-03 06:10:34孫洪濤張鵬飛彭晨丁飛
湖南大學(xué)學(xué)報(自然科學(xué)版) 2022年10期
孫洪濤,張鵬飛,彭晨,丁飛
(1.曲阜師范大學(xué)工學(xué)院,山東日照 276826;2.上海大學(xué)機(jī)電工程與自動化學(xué)院,上海 200444;3.湖南大學(xué)汽車車身先進(jìn)設(shè)計制造國家重點(diǎn)實(shí)驗(yàn)室,湖南長沙 410082)
現(xiàn)代網(wǎng)聯(lián)汽車運(yùn)動控制通過通信網(wǎng)絡(luò)將車輛的傳感器、控制器和執(zhí)行器密切結(jié)合[1-2].隨著5G 網(wǎng)絡(luò)技術(shù)的蓬勃發(fā)展,網(wǎng)絡(luò)化的應(yīng)用變得越來越普遍,以網(wǎng)絡(luò)控制技術(shù)為支撐的自主車輛控制成為當(dāng)前研究的熱點(diǎn)問題,如將駕駛安全性和制動能量回收相結(jié)合[3],控制車輛急轉(zhuǎn)彎時的穩(wěn)定性[4]等.由于網(wǎng)絡(luò)控制系統(tǒng)在控制和通信方面的性能表現(xiàn)受頻帶寬、采樣延遲和數(shù)據(jù)丟包的影響[5],因此,在網(wǎng)聯(lián)車輛設(shè)計中,通信與控制的協(xié)同設(shè)計問題不容忽視.
路徑跟蹤控制是自主車輛研究的核心,自主車輛的路徑跟蹤系統(tǒng)由通過無線網(wǎng)絡(luò)連接控制器來完成路徑跟蹤任務(wù).在給定車輛位置并考慮設(shè)定點(diǎn)的情況下,路徑跟蹤控制器使用二次曲線方法來計算并向自主車輛的轉(zhuǎn)向機(jī)構(gòu)發(fā)送控制命令[6].目前,諸多控制策略已經(jīng)被用來處理復(fù)雜道路情況的路徑跟蹤控制問題,如模糊控制[7],MPC 算法[8]和魯棒控制方法[9].文獻(xiàn)[10]介紹了一種結(jié)合局部路徑規(guī)劃和路徑跟蹤的MPC 框架,同時控制器約束預(yù)測狀態(tài)到兩種安全包絡(luò)內(nèi)來避免車輛旋轉(zhuǎn)或撞上障礙物;文獻(xiàn)[11]提出了一種雙隱層輸出反饋神經(jīng)網(wǎng)絡(luò)快速非奇異終端滑模控制策略,以更準(zhǔn)確、快速地實(shí)現(xiàn)自主車輛的路徑跟蹤任務(wù);文獻(xiàn)[12]提出了一種三層結(jié)構(gòu)控制器,為每個車輪設(shè)計了自適應(yīng)律,以完成路面情況未知和擾動未知的路徑跟蹤任務(wù);文獻(xiàn)[13]通過一種多核強(qiáng)化學(xué)習(xí)控制算法來提高異構(gòu)數(shù)據(jù)樣本函數(shù)的近似能力,從而實(shí)現(xiàn)路徑跟蹤的精確度和平滑度.但這些方法并未考慮自主車輛路徑跟蹤中的通信約束,具有一定的保守性.另外,周期性采樣機(jī)制在路徑跟蹤控制上得到廣泛應(yīng)用,但由于周期性采樣的機(jī)制會周期性的發(fā)送大量數(shù)據(jù),容易造成大量的資源浪費(fèi),特別是自主車輛廣泛采用無線網(wǎng)絡(luò)傳輸,多傳感器的數(shù)據(jù)傳輸易造成帶寬受限現(xiàn)象,進(jìn)而導(dǎo)致自主車輛路徑跟蹤性能下降.為了在保證一定路徑跟蹤控制性能的同時有效節(jié)約有限的通信資源,減少數(shù)據(jù)傳輸并提高通信效率對于網(wǎng)絡(luò)化的路徑跟蹤控制系統(tǒng)設(shè)計具有重要意義.近年來,事件觸發(fā)機(jī)制因在通信及計算資源節(jié)約方面的優(yōu)勢而受到廣泛的關(guān)注.例如,文獻(xiàn)[14]提出了一種新穎的離散時間動態(tài)事件觸發(fā)機(jī)制,控制輸入更新之間的絕對誤差;文獻(xiàn)[15]提出具有時變切換拓?fù)涞臑V波網(wǎng)絡(luò)上一類扇區(qū)有界非線性系統(tǒng)的分布式自適應(yīng)事件觸發(fā)策略;文獻(xiàn)[16]研究了一種彈性事件觸發(fā)控制算法適用于能量受限拒絕服務(wù)攻擊的系統(tǒng);文獻(xiàn)[17]提出了一種具有記憶特征的事件觸發(fā)策略來提高系統(tǒng)控制性能.但從目前的研究來看,針對自主車輛的事件觸發(fā)控制研究并不多見.
基于以上討論,傳統(tǒng)靜態(tài)事件觸發(fā)策略采用固定事件觸發(fā)參數(shù),無法動態(tài)調(diào)整通信閾值,現(xiàn)有的變閾值觸發(fā)策略,如自適應(yīng)事件觸發(fā)控制、彈性事件觸發(fā)控制主要是在調(diào)節(jié)過程中單調(diào)的減小觸發(fā)參數(shù)來保證控制性能,難以實(shí)現(xiàn)系統(tǒng)的穩(wěn)定性與通信效率的動態(tài)協(xié)同控制.因此,本文的主要貢獻(xiàn)點(diǎn)可以歸納為如下兩個方面:
1)提出了一種新型的基于狀態(tài)感知的事件觸發(fā)通信策略,通過對系統(tǒng)狀態(tài)的穩(wěn)定性判斷,動態(tài)調(diào)節(jié)事件觸發(fā)參數(shù),實(shí)現(xiàn)了路徑跟蹤控制系統(tǒng)中通信傳輸與控制性能的動態(tài)耦合;
2)基于所設(shè)計的SS-ETC 策略,綜合利用時滯系統(tǒng)分析方法和Lyapunov 穩(wěn)定性理論,設(shè)計了基于SS-ETC 的H∞事件觸發(fā)控制器,實(shí)現(xiàn)了網(wǎng)絡(luò)化路徑跟蹤控制與通信的協(xié)同設(shè)計.
本文的組織結(jié)構(gòu)如下:第一部分主要針對自主車輛的動力學(xué)行為進(jìn)行網(wǎng)絡(luò)化路徑跟蹤控制系統(tǒng)的建模,并提出了基于狀態(tài)感知的事件觸發(fā)通信策略;第二部分給出了本文的主要結(jié)果,包括穩(wěn)定性分析和事件觸發(fā)控制器設(shè)計等;第三部分通過仿真實(shí)驗(yàn)驗(yàn)證了所提出的理論結(jié)果的有效性.最后對本文進(jìn)行了總結(jié).
1 事件觸發(fā)控制建模
1.1 車輛路徑跟蹤控制系統(tǒng)建模
如圖1 所示,可將自主車輛等效為一個兩自由度的動力學(xué)模型,可按如下方式進(jìn)行控制:
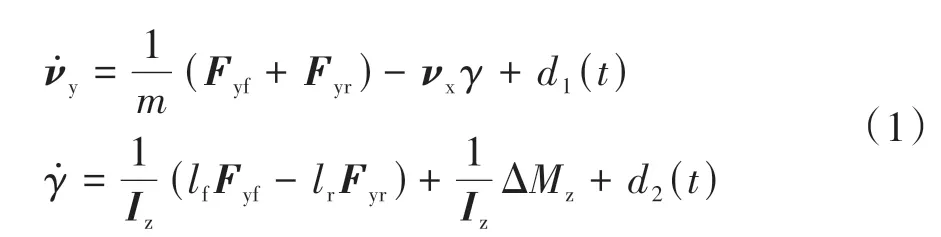
式中:m和Iz分別是車輛的質(zhì)量和繞z軸的轉(zhuǎn)動慣量;車輛重心(CG)的縱向速度為vx,橫向速度為vy,橫擺率為γ;Fyf和Fyr分別是前輪和后輪的側(cè)向力:d1(t)和d2(t)代表系統(tǒng)中的不確定項(xiàng),如側(cè)向風(fēng)力和輪胎滾動時的阻力等;ΔMz是左右車輪縱向輪胎力差產(chǎn)生的外偏航力矩,可表示為:

式中:Fxi是第i個輪胎的縱向力,ld是輪距的一半,lf和lr表示從重心到前軸和后軸的距離.
同時,前胎和后胎的側(cè)向力是輪胎滑移角的函數(shù),可表示為:

式中:Cf和Cr降低了前后輪胎的側(cè)偏剛度,前后輪胎的滑移角αf和αr可表示為:

式中:δf指的是前輪轉(zhuǎn)向角.進(jìn)一步,路徑跟蹤誤差動力學(xué)模型如圖2所示.

圖2 路徑跟蹤模型示意圖Fig.2 Schematic diagram of path-tracking model
路徑跟蹤車輛模型可表示為:

式中:φe定義為車輛縱軸與期望路徑中心線之間的夾角;ye定義為在預(yù)覽距離ls處相對于道路中心線的橫向偏移;y是從車輛重心到所需路徑的橫向偏移.y、ye和φe之間的近似關(guān)系可表示為:

設(shè)φd是道路中心線相對于全局坐標(biāo)系的偏航角,則車輛的偏航角可推導(dǎo)為:

為了用縱向速度vx去跟蹤具有道路曲率ρref的期望路徑,絕對期望橫擺率應(yīng)為vxρref,即=vxρref.最后,定義系統(tǒng)的狀態(tài)向量x=[vy,γ,φe,ye]T,并結(jié)合式(1)和式(5),自主車輛的路徑跟蹤控制模型的狀態(tài)空間可表示為:
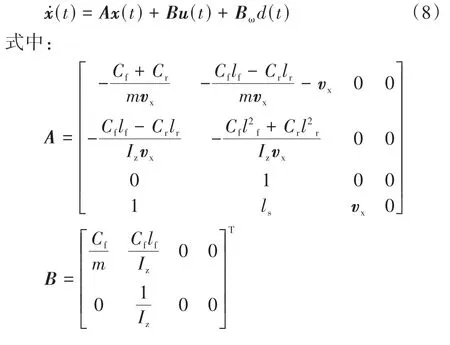
Bω是一個與外界擾動及曲率變化相關(guān)的4×1 的常數(shù)矩陣.
1.2 SS-ETC策略設(shè)計
為方便分析,首先給出如下假設(shè).
假設(shè)1假設(shè)傳感器是時間觸發(fā)[18],并將采樣周期表示為h.可以將采樣序列表示為集合S1={0,h,2h,…,kh},k∈N.
假設(shè)2采樣數(shù)據(jù)是否被發(fā)送是由所提出的事件觸發(fā)通信策略的閾值決定的.S2表示預(yù)先設(shè)計的事件發(fā)生器選擇的傳輸序列,S2={0,t1h,t2h,…,tkh},顯然,S2?S1.
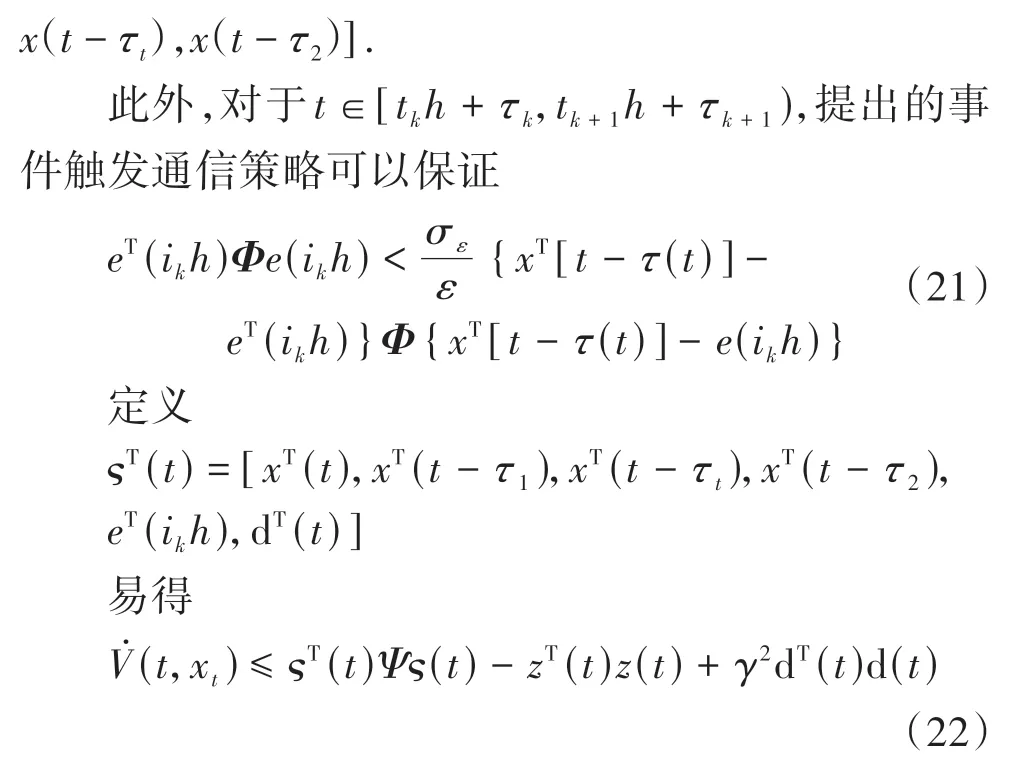
假設(shè)3控制操作由零階保持器(ZOH)產(chǎn)生,其保持間隔t∈[tkh+τtk,tk+1h+τtk+1),其中τtk是網(wǎng)絡(luò)通信環(huán)境下的傳輸時延.
由于事件觸發(fā)控制是基于采樣誤差的控制方式,定義e(ikh)表示當(dāng)前采樣時刻和最近傳輸?shù)牟蓸訒r刻之間的狀態(tài)誤差,即

式中:ikh=tkh+lh,l∈R.
基于上述定義,提出如下基于狀態(tài)感知的事件觸發(fā)通信策略
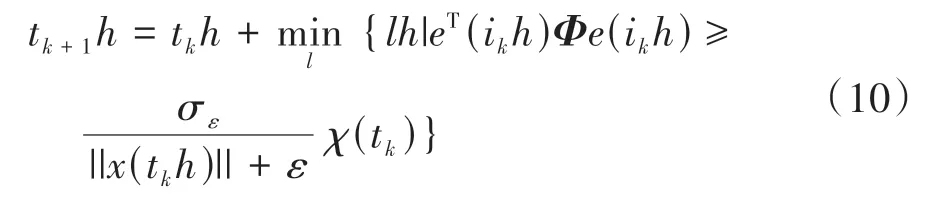
式中:χ(tk)=xT(tkh)Φx(tkh);ε>0 為正標(biāo)量;σε是關(guān)于ε事件觸發(fā)參數(shù);Φ是待求正定矩陣.
注1由于||x(tkh)||的引入,使得上述事件觸發(fā)通信策略的通信參數(shù)(閾值)將由路徑跟蹤控制系統(tǒng)的狀態(tài)||x(tkh)||動態(tài)確定.容易看出,該事件觸發(fā)策略具有如下特點(diǎn).
1)事件觸發(fā)參數(shù)σε是依賴參數(shù)ε設(shè)定的,而ε的存在可避免事件觸發(fā)函數(shù)分母為0,從而保證所設(shè)計的事件觸發(fā)函數(shù)有意義.
2)由事件觸發(fā)條件,即式(10)可知,該事件觸發(fā)函數(shù)可自動提供最大觸發(fā)閾值.因此,如果σε設(shè)計得當(dāng),在事件觸發(fā)閾值自適應(yīng)動態(tài)調(diào)整的同時,所有的事件觸發(fā)傳輸均能夠滿足控制系統(tǒng)的穩(wěn)定性條件.
3)如果||x(tkh)||變大,從控制系統(tǒng)上來說,系統(tǒng)將變得不穩(wěn)定.而此時,在||x(tkh)||的調(diào)節(jié)下,事件觸發(fā)閾值將變小,使得狀態(tài)傳輸頻率增大,進(jìn)而控制器的控制調(diào)節(jié)能力增強(qiáng).
4)如果||x(tkh)||變小,從控制系統(tǒng)上來說,系統(tǒng)將趨于穩(wěn)定.在||x(tkh)||的調(diào)節(jié)下,事件觸發(fā)閾值將變大,使得狀態(tài)傳輸頻率降低,進(jìn)而節(jié)約通信資源.
1.3 SS-ETC機(jī)制下的網(wǎng)絡(luò)化路徑跟蹤控制模型
在采樣控制架構(gòu)下,基于狀態(tài)反饋的路徑跟蹤控制可表示為:
式中:K是待設(shè)計的控制器增益.
結(jié)合式(9)、(10)和(13),在SS-ETC 機(jī)制下的閉環(huán)路徑跟蹤控制系統(tǒng)可進(jìn)一步表示為:
式中各個參數(shù)的定義由前述式(10)給出.這里,對于t∈[t0-τ2,t0),x(t)的初始狀態(tài)定義為x(t0).
基于所提出的SS-ETC 機(jī)制,本文將通過設(shè)計控制器增益K使得網(wǎng)絡(luò)化的自主車輛路徑跟蹤控制實(shí)現(xiàn)如下目標(biāo).
1)當(dāng)不存在外界擾動[即d(t)=0]時,式(11)是漸近穩(wěn)定的;
2)當(dāng)存在外界擾動[即d(t) ≠0]時,式(11)能夠保證||z(t)|| ≤γ||d(t)||.
為了后續(xù)證明方便,本小節(jié)給出如下有用的引理.
引理1(Jensen 不等式)對于任意對稱正定矩陣M>0,標(biāo)量σ>0 和向量函數(shù)ω:[0,σ]→R,有下面的積分不等式成立:

2 主要結(jié)果
在本節(jié)中,給出了SS-ETC 機(jī)制下系統(tǒng)可實(shí)現(xiàn)穩(wěn)定性的理論依據(jù),并通過構(gòu)造Lyapunov泛函,對系統(tǒng)穩(wěn)定性進(jìn)行證明.進(jìn)而設(shè)計具有擾動抑制性能指標(biāo)γ的H∞控制器并求出狀態(tài)反饋增益K.
2.1 穩(wěn)定性分析
定理1對于給定的正實(shí)數(shù)τ1,τ2,γ,σε,ε和狀態(tài)反饋增益K,在事件觸發(fā)通信策略的作用下,如果存在實(shí)對稱矩陣P>0,Φ>0,Ri>0,Qi>0(i=1,2)和適當(dāng)維數(shù)的矩陣W和U滿足
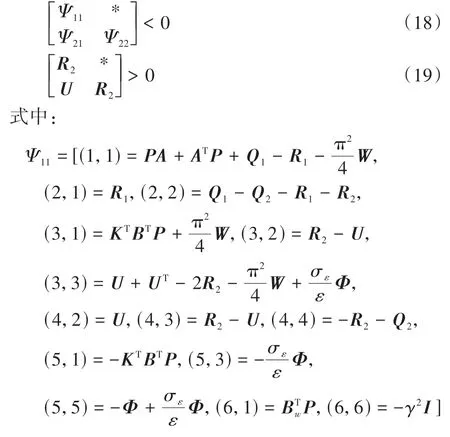
則系統(tǒng)(14)是漸近穩(wěn)定的并具有γ的H∞擾動抑制性能.
證選取如下Lyapunov-Krasovskii泛函:
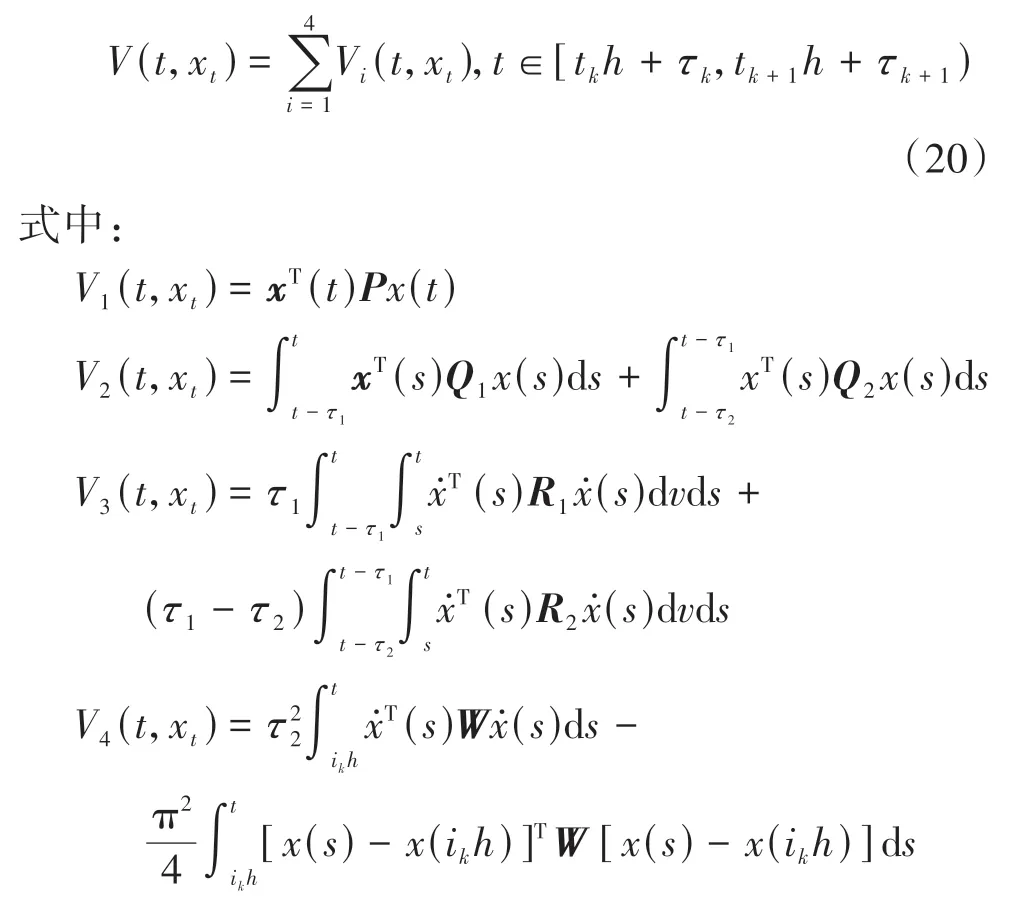
沿著閉環(huán)系統(tǒng)(14)對上述Lyapunov 函數(shù)進(jìn)行求導(dǎo)得到:

這里Ψ=Ψ11-已在定理1 中定義.進(jìn)而利用Schur 補(bǔ)引理,可得到式(18).利用Lyapunov函數(shù)法,我們可以得到當(dāng)d(t)=0時系統(tǒng)是漸近穩(wěn)定的;在零初始條件下,||z(t)|| ≤γ||d(t)||,系統(tǒng)具有γ的H∞擾動抑制性能.
證畢
2.2 控制器設(shè)計
基于定理1,我們得出了如下H∞路徑跟蹤控制器的設(shè)計方法,并給出了事件觸發(fā)參數(shù)與控制器協(xié)同設(shè)計算法.
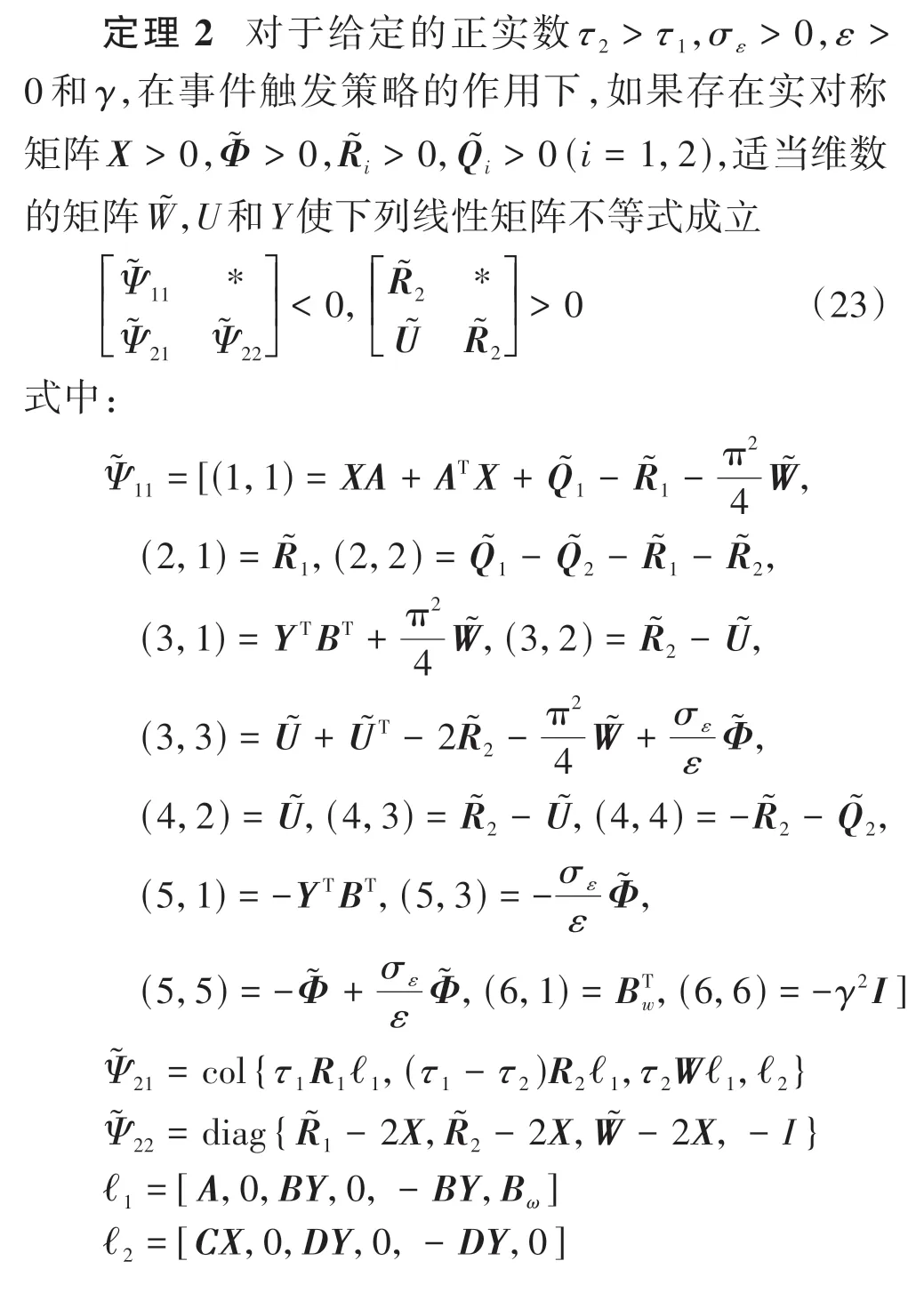
那么,控制系統(tǒng)在該方案下具有水平為γ的H∞擾動抑制性能且反饋增益為K=YX-1.
在此基礎(chǔ)上,給出了尋找事件觸發(fā)參數(shù)σε的協(xié)同設(shè)計算法如表1所示.
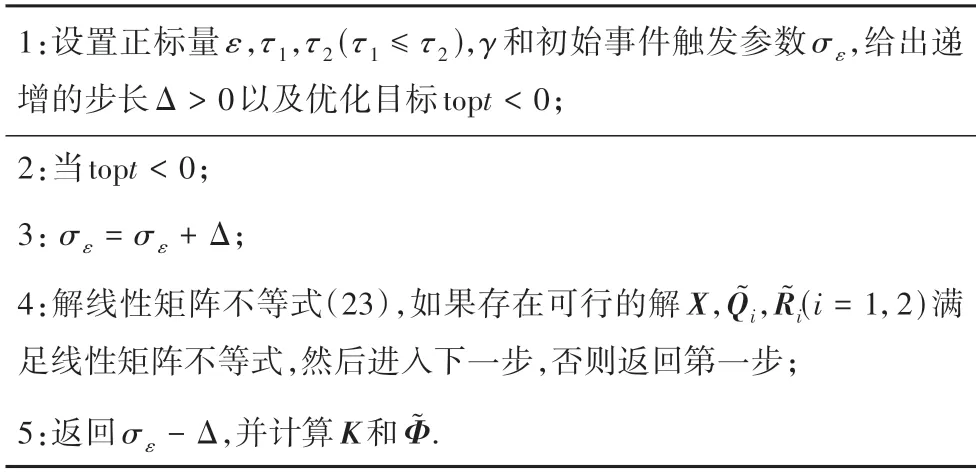
算法1 控制器參數(shù)算法設(shè)計Tab.1 The algorithm design of controller parameters
3 仿真驗(yàn)證
本節(jié)將參考文獻(xiàn)[20]中所涉及的路徑跟蹤控制模型對所提出的事件觸發(fā)控制方法進(jìn)行有效性驗(yàn)證,具體車輛工況參數(shù)如下:

代入到式(8),得到狀態(tài)空間表達(dá)式(11)的系數(shù)矩陣:
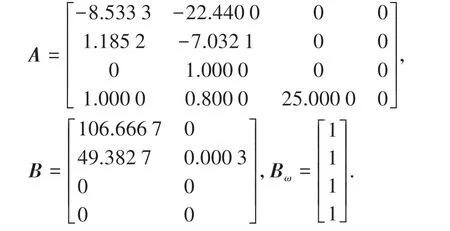
并設(shè)定初始狀態(tài)為x(0)=[-0.1 0.0 -0.01 0.8]T,擾動為d(t)=0.1e-0.1t.顯然,沒有控制輸入的情況下,該系統(tǒng)不能穩(wěn)定.
網(wǎng)絡(luò)延時τ1=0.01,τ2=0.05,ε=1,γ=200,采樣周期h=0.001 s.利用Matlab 的LMI 工具箱求得σε=0.3,
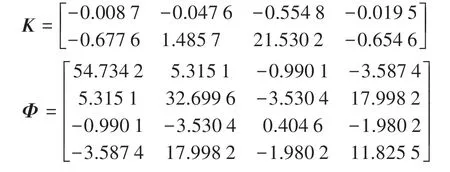
進(jìn)一步,設(shè)仿真時間為T=5 s,將得到的控制增益K和設(shè)計的矩陣Φ進(jìn)行如下仿真.
1)靜態(tài)事件觸發(fā)H∞控制
在靜態(tài)事件觸發(fā)下,利用所設(shè)計的控制器,其路徑跟蹤的狀態(tài)響應(yīng)如圖3,信號觸發(fā)的時刻和分布間隔如圖4所示.
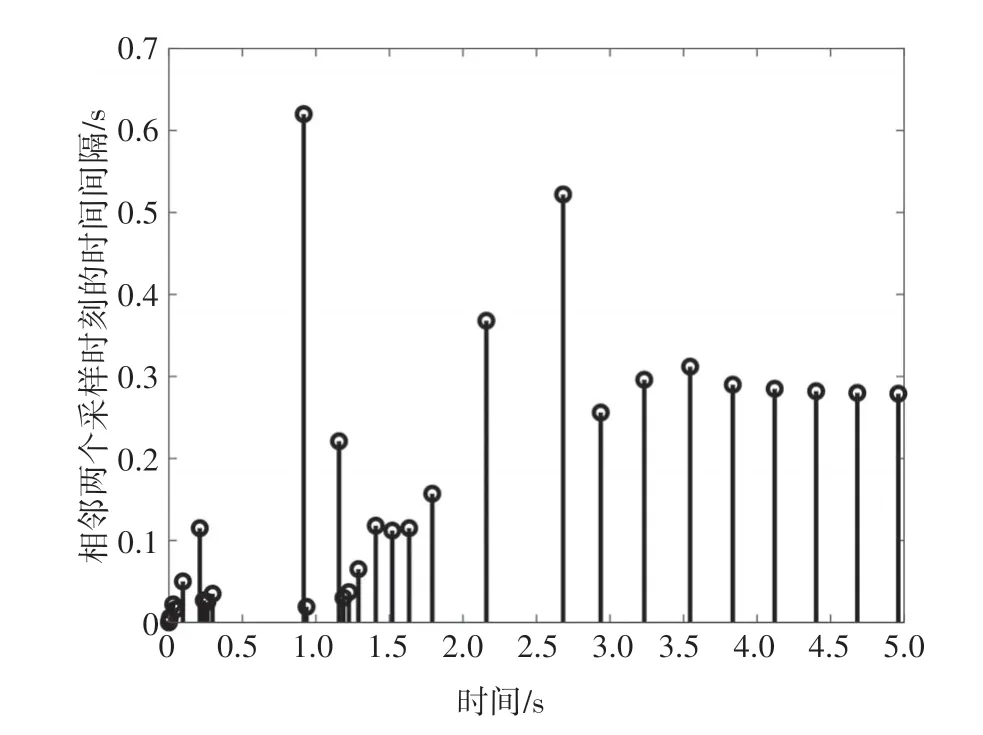
圖4 靜態(tài)ETC機(jī)制下的觸發(fā)間隔Fig.4 Trigger interval under static ETC mechanism
由圖3 可知,在該控制器作用下,系統(tǒng)是可以實(shí)現(xiàn)穩(wěn)定的,但在穩(wěn)定過程中存在較大幅度的波動.尤其通過橫擺率(車輛繞重心左右晃動的頻率)和橫向速度(垂直于車輛期望路徑方向的速度)的曲線變化可以看出車輛會出現(xiàn)較大幅度的晃動.由圖4 可知,在靜態(tài)事件觸發(fā)條件下,路徑跟蹤控制系統(tǒng)發(fā)送數(shù)據(jù)包29 個,平均采樣周期0.171 1 s.在系統(tǒng)不穩(wěn)定的情況下,信號傳輸間隔較小,可實(shí)現(xiàn)對系統(tǒng)狀態(tài)的快速調(diào)整;在系統(tǒng)穩(wěn)定的情況下相鄰信號傳輸間隔可提升到0.3 s.雖然車輛最終能夠在擾動存在的情況下實(shí)現(xiàn)穩(wěn)定,但是控制性能不理想.
2)SS-ETC機(jī)制下的事件觸發(fā)H∞控制
仍然采用相同的控制增益K,在SS-ETC 事件觸發(fā)的條件下,得到圖5 所示仿真結(jié)果.從圖5 可以明顯看出控制性能與圖3 相比有較大的改善,車輛能夠在擾動存在的情況下以比較平穩(wěn)的方式按照期望路線行駛.如圖6 所示,SS-ETC 機(jī)制下的數(shù)據(jù)發(fā)送量為40次,平均采樣周期0.124 7 s.與靜態(tài)ETC 機(jī)制相比,在系統(tǒng)處于不穩(wěn)定的情況下0~0.5 s,信號觸發(fā)時刻更加密集,因此數(shù)據(jù)包發(fā)送量大大增加;在系統(tǒng)穩(wěn)定的情況下,相鄰信號傳輸間隔可逐步提升到0.35 s,可以向控制器發(fā)送更少的數(shù)據(jù)包.
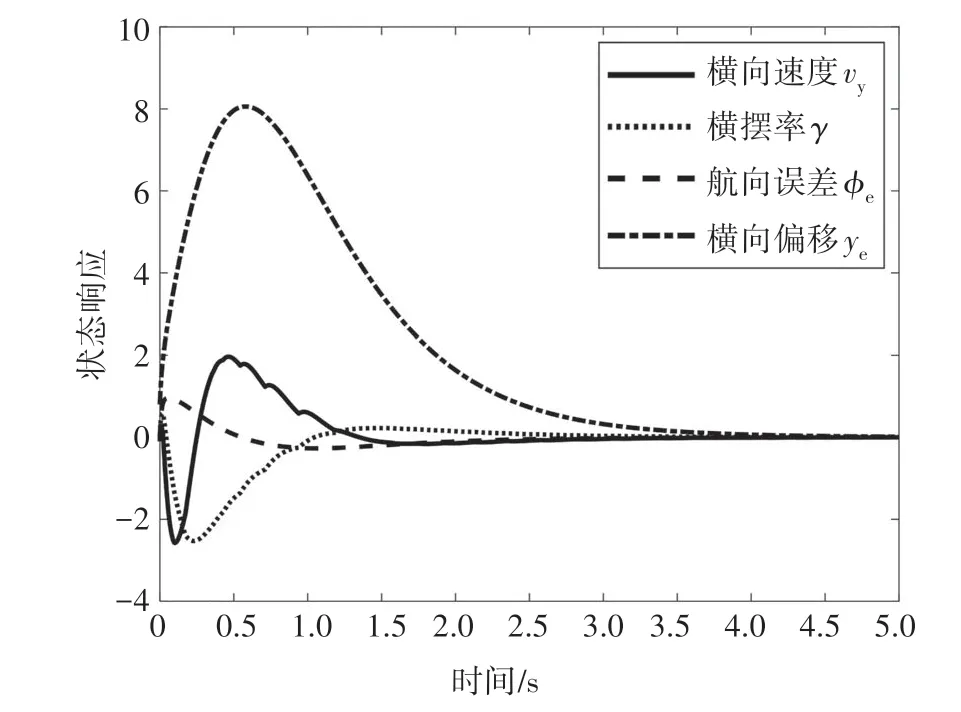
圖5 SS-ETC機(jī)制下的系統(tǒng)狀態(tài)響應(yīng)Fig.5 System state response under SS-ETC mechanism
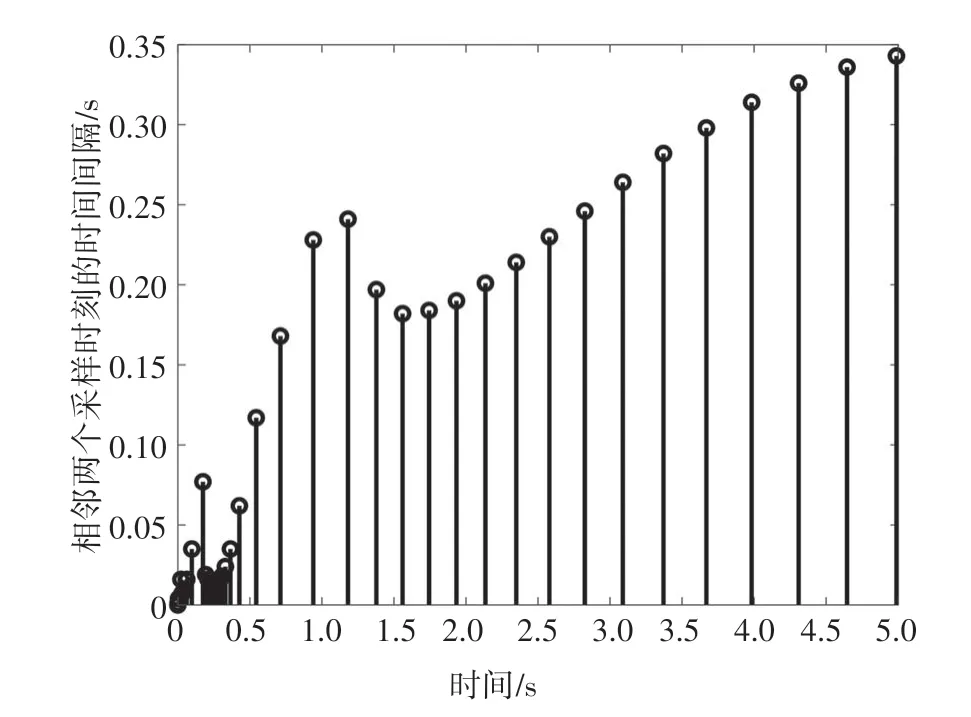
圖6 SS-ETC機(jī)制下的觸發(fā)間隔Fig.6 Trigger interval under SS-ETC mechanism
從圖6和圖7中可以看出,隨著路徑跟蹤系統(tǒng)狀態(tài)趨于穩(wěn)定,觸發(fā)閾值變大,傳輸間隔也逐步增大,減少了數(shù)據(jù)發(fā)送量,能夠有效節(jié)約通信資源.我們仿照文獻(xiàn)[19]中設(shè)計的靜態(tài)事件觸發(fā)控制器進(jìn)行仿真實(shí)驗(yàn).結(jié)果顯示,在不同事件觸發(fā)閾值δ下,靜態(tài)事件觸發(fā)策略在擾動存在時所能達(dá)到的最小平均數(shù)據(jù)傳輸時間為0.15 s,而本文提出的SS-ETC 控制策略可達(dá)到0.10 s,控制性能也更加穩(wěn)定,進(jìn)一步驗(yàn)證了該策略的優(yōu)越性.具體情況詳見表2.
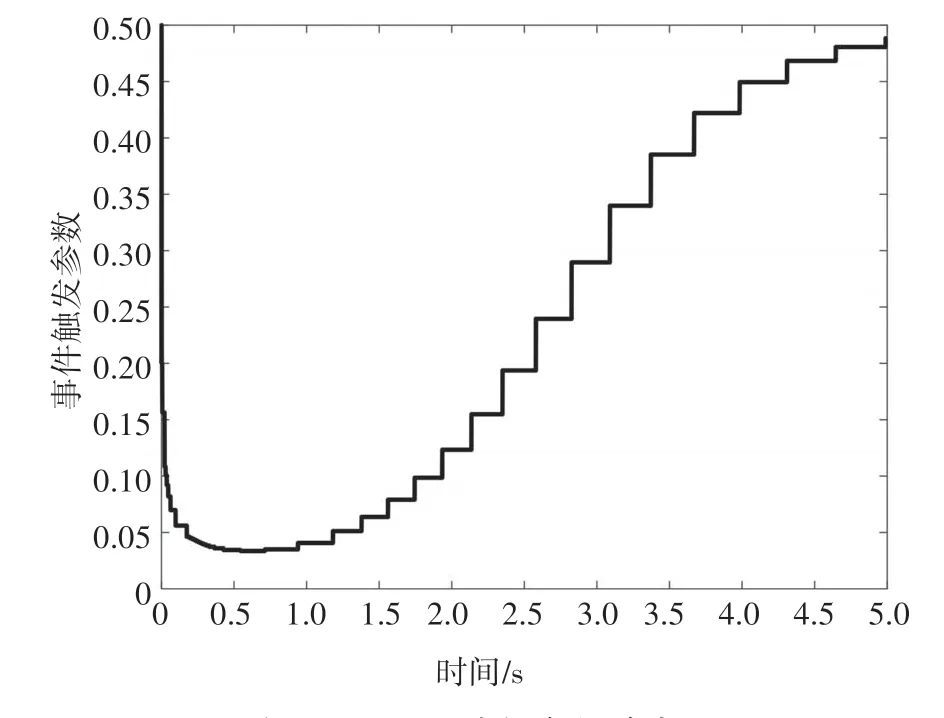
圖7 SS-ETC的觸發(fā)閾值變化Fig.7 The trigger-threshold changes of SS-ETC
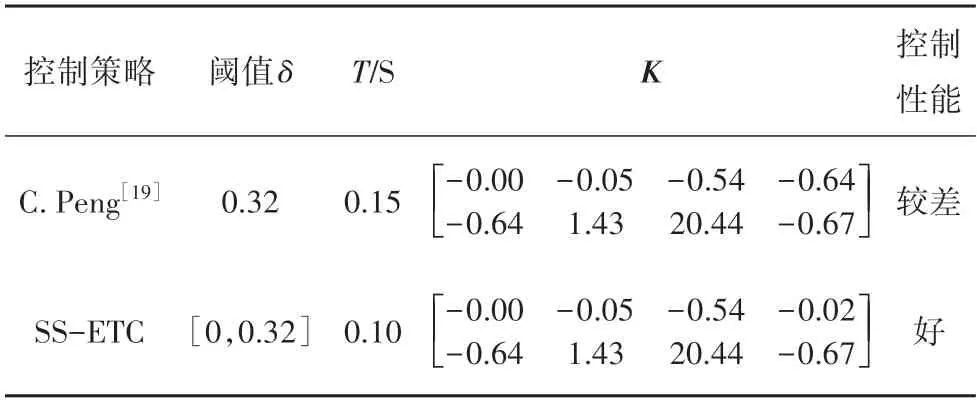
表2 不同控制策略下的平均傳輸時間T和控制器增益KTab.2 Average transmission period T and obtained controller gain K with different control scheme
4 結(jié)論
本文在自主車輛的路徑跟蹤控制建模基礎(chǔ)上提出了一種H∞事件觸發(fā)網(wǎng)絡(luò)控制方法.通過在采樣器端增加事件觸發(fā)機(jī)制,設(shè)計了一種新穎的事件觸發(fā)策略,能夠根據(jù)被控對象的實(shí)時狀態(tài)調(diào)整事件觸發(fā)閾值.通過構(gòu)造Lyapunov函數(shù)的方法,分析了控制系統(tǒng)的漸近穩(wěn)定,實(shí)現(xiàn)了H∞性能指標(biāo)γ的穩(wěn)定性.利用線性矩陣不等式技術(shù),通過設(shè)計的事件觸發(fā)參數(shù),反饋控制器和H∞參數(shù)γ的協(xié)同設(shè)計方法,使系統(tǒng)能夠在不同環(huán)境下實(shí)現(xiàn)控制的穩(wěn)定性.最后通過車輛控制模型進(jìn)行仿真,驗(yàn)證本文所提出理論方法的有效性.本文提出的SS-ETC 方法能夠在保證系統(tǒng)穩(wěn)定性的同時自適應(yīng)地調(diào)整事件觸發(fā)通信閾值,在節(jié)約通信資源的同時可有效實(shí)現(xiàn)通信與控制的動態(tài)協(xié)同設(shè)計.在實(shí)際中應(yīng)主要考慮將事件觸發(fā)控制的系統(tǒng)性能指標(biāo)與實(shí)際工況相結(jié)合,增強(qiáng)基于狀態(tài)感知下的事件觸發(fā)控制方法對具體工況響應(yīng)的快速性與適應(yīng)性.關(guān)于控制策略下信號傳輸?shù)木W(wǎng)絡(luò)安全問題,需要我們在今后的工作中來完成.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17