連續波鉆井液脈沖器電流解耦控制器的研究*
2022-11-05 11:45:56閆宏亮翟偉志
石油機械 2022年10期
閆宏亮 耿 焱 翟偉志
(西安石油大學電子工程學院)
0 引 言
隨著世界上油氣開發的難度越來越大,隨鉆測量技術對井下信息傳輸速率的要求也越來越高。連續波鉆井液脈沖器作為鉆井液脈沖隨鉆測量技術發展中的最新技術,是目前隨鉆測量數據鉆井液脈沖傳輸系統的前沿發展方向[1]。
永磁同步電機(PMSM)作為連續波鉆井液脈沖器轉閥的驅動電機,其動態性能直接影響著井下信息傳輸的質量[2-4]。然而,PMSM受到井下溫度變化的影響,其繞組阻值和電感會發生變化,使得電流環的耦合情況加強,若補償不理想則會降低電機的動態性能。為了消除PMSM交、直軸之間的耦合,提高系統的動態性能,近年來,學者們在傳統解耦控制的基礎上,也做了很多研究。文獻[5]將電感參數的變化和電壓的誤差作為系統的擾動,采用干擾觀測器進行觀測,并與偏差解耦控制相結合,實現了電流環的解耦控制。文獻[6]在內模控制中引入了干擾觀測器,觀測電壓誤差和電機參數的變化,并對這些擾動進行補償,實現了電流環的動態解耦控制。文獻[7]針對靜止同步補償器電流的控制問題,提出了基于擴張狀態觀測器的解耦方案。文獻[8]在內模解耦控制的基礎上進行了改動,引入了滑模控制器,該方法提高了系統的魯棒性。文獻[9]改進了滑模觀測器,并與復矢量解耦控制結合,實現了電流環的解耦控制。文獻[10]主要針對電機的動態解耦,將電機參數的變化視為主要擾動,設計了新型龍貝格觀測器,可以使系統得到完全補償,實現電流環的精準控制。文獻[11]利用電機本體的參考模型構造滑模面,設計速度觀測器,以改善位置和速度估計精度,從而提高電機控制系統的魯棒性。文獻[12]為獲得精確的電流觀測值,通過低通濾波器濾除觀測器輸出的高頻失真信號,實現了精準觀測及電流環的解耦。文獻[13]將未知測量噪聲和外部擾動作用作為擴張狀態變量進行觀測,觀測值可以有效補償風電機組虛擬慣量,更好地抑制電網頻率波動。文獻[14]設計了一種基于1階線性自抗擾控制的調速系統,線性擴張狀態觀測器可以對一般擾動進行估計,線性狀態誤差反饋控制律對擾動進行補償,使磁鏈和轉矩分量實現解耦控制。
上述文獻雖然都實現了電流環的解耦控制,但均只將參數的變化作為擾動觀測。而筆者提出的基于擴張狀態觀測器(ESO)的復合解耦控制,將定子電阻壓降、交叉耦合項、內部不確定性干擾以及外部干擾均視為擾動,利用ESO進行實時觀測和補償,并與偏差解耦相結合,從而實現耦合項的補償,達到動態解耦的目的。
1 傳統電流解耦控制
1.1 數學模型
PMSM在d-q旋轉坐標系中的定子側電壓方程如下:
(1)
式中:ud和uq分別表示d軸和q軸的電壓;id和iq分別表示d軸和q軸的電流;Ld和Lq分別表示d軸和q軸的電感;R為電機的定子電阻;ψf為永磁體磁鏈;ωe為轉子的電角速度;ωeLqiq和ωeLdid+ωeψf分別表示d軸和q軸的交叉耦合項。
通過式(1)可以得到,耦合項和轉子的電角速度成正比,說明電機運行在高速狀態下,交叉耦合會更加嚴重。
1.2 反饋解耦控制
本文選用的是id=0的控制方法。d-q軸交叉耦合項的補償是本文研究的重點,所以筆者主要分析電流環調節器。
電流調節器采用傳統的PI調節器,使用反饋解耦控制方法進行耦合補償,通常由自動控制理論中的典型I系統對PI參數設計。但是該方法設計的參數魯棒性較差,因此選用內模控制器對PI參數進行設計,并且內模控制器調節參數僅有1個[15],更加方便計算。當耦合被完全補償消除后,d軸和q軸電流子系統就具有了統一的形式。以d軸為例,忽略延遲環節的影響,得到d軸電流子系統的閉環傳遞函數G(s)為:
(2)
式中:α′為調節參數;s為子系統電流。
畫出α′從1 000到5 000變化時,d軸電流子系統的閉環傳遞函數的伯德圖,如圖1所示。從圖1可以看到,當α′在1 000到5 000之間變化時,控制系統始終穩定。
1.3 偏差解耦控制
偏差解耦是從電流環給定值與反饋值處,引入外部的解耦支路,從而抵消掉耦合項的影響,實現系統的解耦控制。圖2為等效的偏差解耦控制框圖。

圖1 d軸電流子系統閉環傳遞函數伯德圖Fig.1 Bode diagram of closed-loop transfer function of d-axis current subsystem

圖2 等效偏差解耦結構圖Fig.2 Equivalent deviation decoupling structure
由圖2可以得到,電流給定值與反饋值之間的關系表達式如下:
(3)
其中:

(4)
Cdd(s)=Cqq(s)=
(5)
(6)

2 基于ESO的復合解耦控制
2.1 ESO的控制原理
由于擾動是1階系統,考慮將ESO設計為2階,其表達式為:
(7)
其中:
(8)

2.2 ESO的設計
隨著鉆井深度的增加,脈沖器電機所處環境溫度會上升,引起電機電感和電阻等參數變化,導致參數不匹配。本文將電機參數中的定子電阻R,d軸和q軸的電感Ld和Lq,內部不確定性干擾以及外部干擾均視為總擾動,用dd和dq表示,則有:
(9)
式中:ΔR、ΔLd、ΔLq和Δψf表示對應參數實際值和額定值之間的偏差量;εd和εq分別表示外部的擾動和等效未建模的部分。
對d軸和q軸分別設計對應的ESO,用fd和fq表示定子電阻壓降、交叉耦合項以及干擾總和,將其視為總擾動。因為d軸和q軸的ESO具有統一的形式,則以d軸為例,式(7)可重新表示為:
(10)
其中:
(11)
將總擾動項作為系統擴張狀態變量進行觀測,為獲取擴張狀態變量的觀測值,設計d軸的ESO為:
(12)

從式(12)可以看到,d軸ESO不受q軸干擾,兩者觀測器相互獨立,互不干擾,有利于實現解耦控制。
2.3 基于ESO的復合解耦控制
將式(10)重新表示為:
(13)
其中:
(14)
在控制系統的設計中,將γd和γq分別作為d軸和q軸子系統中的干擾項,此干擾項由觀測器觀測并進行補償。根據式(13)可以得到PMSM的簡化模型。將其與擴張狀態觀測器相結合,可以得到PMSM的復合解耦簡化結構圖,如圖3所示。
圖3可用數學表達式描述為:
(15)
(16)


圖3 基于ESO的PMSM復合解耦結構圖Fig.3 Composite decoupling structure based on ESO
因為Kp>0,并且bd>0,所以閉環控制系統的輸出可以跟蹤輸入,是收斂的,系統也穩定。
3 對比仿真分析
為了驗證本文所采用的基于ESO的復合解耦控制策略的有效性和可行性,在MATLAB/Simulink中分別搭建了反饋控制解耦策略、偏差解耦控制策略以及復合解耦控制策略的模型,并且對這3種控制策略的d軸電流和轉速波形圖進行了對比分析。
模型中3種控制策略的轉速環PI相同,其中比例系數為0.35,積分系數為50。PMSM參數為:rs=0.958 Ω,Ld=5.25 mH,Lq=12 mH,ψf=1.096 2 Wb。仿真電機突加突減負載運行情況如下,在0.2 s時由空載突加至滿載,在0.3 s時由滿載突減至空載,通過比較q軸電流變化時的d軸電流動態過程,從而反映3種控制策略電流環的動態解耦效果。
3.1 電機參數匹配時
電機的給定轉速為1 000 r/min,在電機參數匹配的情況下使仿真電機突加、突減負載。圖4為3種控制方法的d軸電流。通過波形可以看出:三者在電機參數匹配的情況下,電流子系統的解耦效果都很好,即在0.2和0.3 s系統負載值突變時,q軸電流的突變并未引起d軸電流的突變,d軸電流幾乎沒有波動,未受到q軸電流變化的影響。3種控制方法轉速對比如圖5所示。由圖5可以看出,在電機加、減載的時候,3種控制策略的恢復時間幾乎相同,其中反饋解耦的超調為0.9%,偏差解耦的超調為0.8%,復合解耦的超調為0.5%。可見復合解耦的動態速降最小,因此復合解耦的動態性能在三者中最好。

圖4 電機參數匹配時3種控制方法的id對比圖Fig.4 id vs.current for three control methods
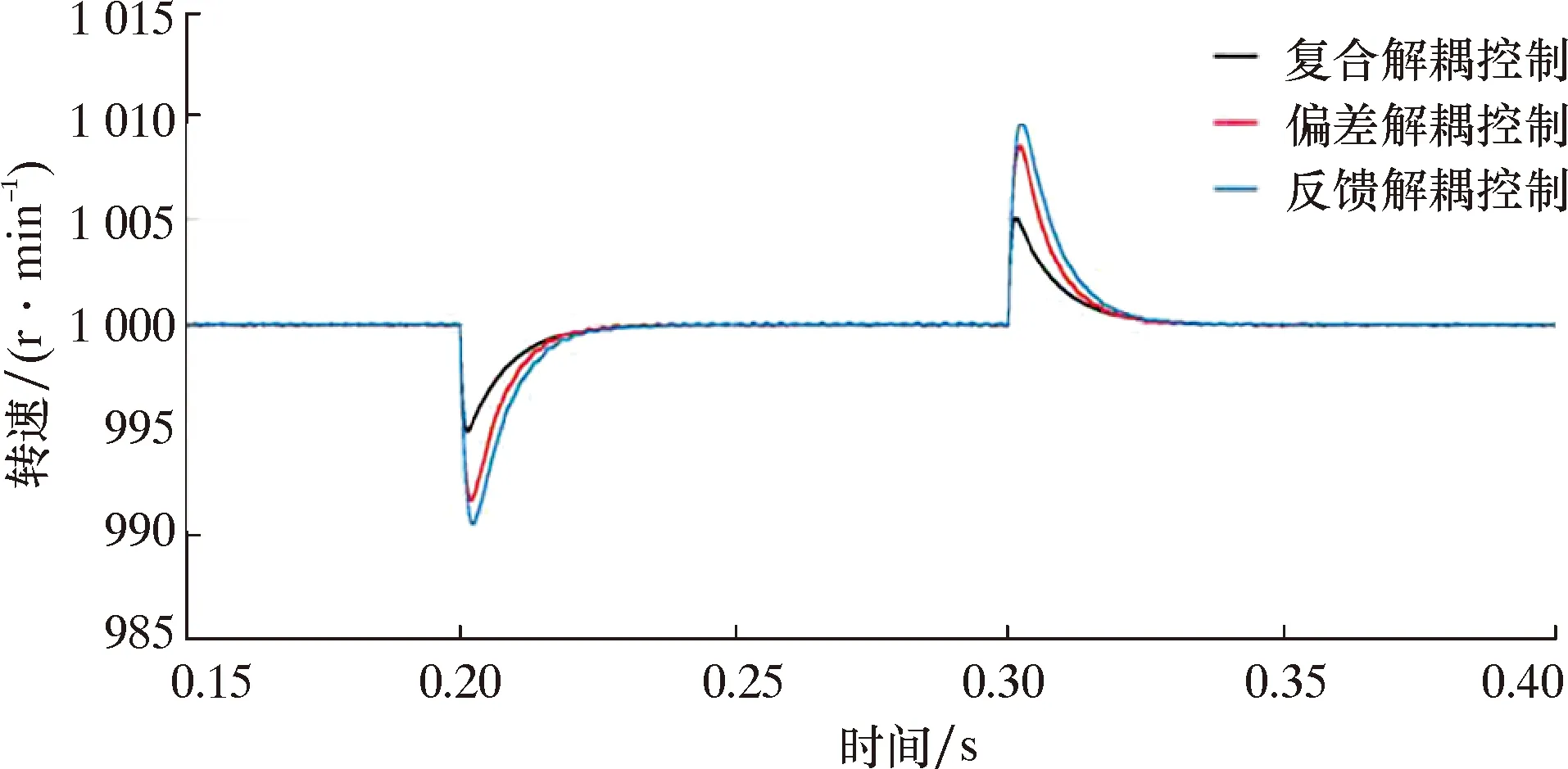
圖5 電機參數匹配時3種控制方法轉速對比圖 Fig.5 Rotary speed vs.time for three control methods
3.2 電機參數不匹配時
3.2.1 電感參數不匹配
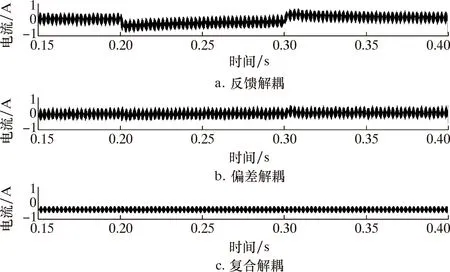
圖6 3種控制方法id對比圖(電感不匹配)Fig.6 id vs.current for three control methods (mismatch of inductance)
當外界原因導致電機所處環境溫度升高時,會導致電感的阻值變小。當電機參數電感的實際值為額定值的0.7倍時,電機的給定轉速仍為1 000 r/min,電機突加、減載。 圖6為3種控制方法的d軸電流。由圖6可以看出:在0.2 和0.3 s系統突加、減載引起q軸電流突變時,反饋解耦控制的d軸電流具有很明顯的波動;偏差解耦控制的d軸電流也具有一定程度上的波動,但是波動的幅值要比反饋解耦控制的小很多;復合解耦控制中,d軸的電流幾乎不變,保持一條直線,未受到q軸電流的影響。3種控制方法轉速對比如圖7所示。從圖7可以看出,3種解耦方式的恢復時間幾乎一致,其中反饋解耦的超調為1.1%,偏差解耦的超調為0.9%,復合解耦的超調為0.5%。可見復合解耦的動態速降最小,因此復合解耦的動態性能在三者中最好。

圖7 3種控制方法轉速對比圖(電感不匹配)Fig.7 Rotary speed vs.time for three control methods(mismatch of inductance)
3.2.2 電阻參數不匹配時
當外界原因導致電機所處環境溫度升高時,會導致電阻的阻值變大。當電機電阻的實際值為額定值的1.5倍時,電機的給定轉速為1 000 r/min,電機突然加載和減載。圖8為3種控制策略下d軸波形圖。

圖8 3種控制方法id對比圖(電阻不匹配)Fig.8 id vs.current for three control methods (mismatch of resistance)
由圖8可以看出:在0.2和0.3 s時,反饋解耦控制的d軸電流受到了q軸電流變化的影響,有明顯波動起伏,解耦效果不理想;偏差解耦控制的d軸電流基本保持一條直線,但是電流整體的波形不是很平滑,說明電流在0附近,跳躍比較大;而復合解耦控制的電流波形幾乎沒有波動,電流波形也很平滑,解耦效果更好。圖9為3種控制方法轉速對比圖。由圖9可以看出,3種解耦方式的恢復時間幾乎一致,其中反饋解耦的超調為1.35%,偏差解耦的超調為1.15%,復合解耦的超調為0.50%。可見復合解耦的動態速降最小,因此復合解耦的動態性能在三者中最好。

圖9 3種控制方法轉速對比圖(電阻不匹配)Fig.9 Rotary speed vs.time for three control methods (mismatch of electrical resistance)
4 結 論
(1)在電機參數匹配時,反饋解耦控制和偏差解耦控制具有相同的動態性能,復合解耦控制的動態性能優于前兩者;3種控制方法均可補償電流子系統的耦合項,復合解耦控制在抗負載擾動性能上也是三者中動態速降最小、性能最好的。
(2)在電機參數不匹配時,無論是電感參數還是電阻參數不匹配的情況,反饋解耦控制和偏差解耦控制均不能完全實現電流環的動態解耦,在突加、突減負載時,d軸電流均出現了不同程度的波動,并且轉速的動態速降增大,整個控制系統的抗負載擾動性能也出現了波動。但是復合解耦控制在相同條件下,完全實現了電流環的動態解耦,并且此時的動態速降和參數匹配時相同,并沒有因為參數的變化使得電機轉速的超調增大,明顯提高了系統的抗擾性能和魯棒性。
(3)將復合解耦應用在連續波鉆井液脈沖器轉閥驅動電機的電流環控制中,可以提高電機控制系統的動態性能,從而提高連續波鉆井液脈沖器的信息傳輸質量。