CRH1A型動車組輪徑校準不成功問題分析及對策
2022-11-11 03:11:42薛文敏
鐵道機車車輛 2022年5期
關鍵詞:故障
薛文敏
(中國鐵路南昌局集團有限公司福州動車段,福州 350001)
2019年福州動車段運用中發生多件CRH1A型動車組輪徑不合格故障,通過輪徑校準后大部分故障能立即消除,但是少數件因校正不成功導致動車組牽引缺失,造成限速運行。為分析故障原因,文中從動車組輪徑校準原理入手,綜合故障數據進行分析,并提出防范的措施,減少對運輸秩序的干擾。
1 CRH1A型動車組輪徑校正原理分析
1.1 觸發動車組輪徑校正的條件
CRH1A型動車組的輪徑值分別存儲在列車診斷系統和PCU(Propulsion Control Unit,牽引控制單元)內,當PCU內存儲的輪徑值與BCU(Brake Control Unit,制動控制單元)內各傳感器計算出的輪徑值存在較大差異時,PCU會反饋一個“需要進行輪徑校準”的信號給列車控制系統,并顯示在IDU(Intelligent Display Unit,智能顯示單元)上,司機通過IDU上的輪徑校準按鈕實施輪徑校準。
根據CRH1A型動車組輪徑校正設計邏輯,以下2項其中任意一項滿足條件,動車組IDU根據系統測算結果提示“需要進行輪徑校準”,如圖1所示[1]。

圖1 輪徑校正的邏輯原理圖
(1)動車組的列車控制系統檢測到系統內存儲的輪徑值超出范圍(835~925 mm,其中915 mm為默認輪徑值)。
(2)動車組防滑功能未激活情況下,同一單元組內最大—最小速度的差值>6 km/h。
動車組實施校準后,系統會重新計算一個新的輪徑值存入PCU內,系統根據校準后寫入的輪徑值重新計算列車速度,此時如果同一單元組內計算出的最大速度與最小速度的差值<3 km/h,“需要進行輪徑校準”提示信息會自動結束。
IDU會彈屏報B類警報對司機進行提示,“當前故障”按鈕的顏色變為黃色對司機再次提示,司機點擊后可進行問題查詢,查詢界面如圖2所示。

圖2 動車組IDU顯示的故障界面
1.2 滿足輪徑校正動作的條件
根據CRH1A型動車組軟件設計原理,CRH1A型動車組在運行過程中,需要完成輪徑校正并取得成功,必須同時滿足以下條件:
(1)動車組處于平直線路上。
(2)GPS速度信號有效。
(3)30 km/h<速度<130 km/h。
(4)惰行30 s。
由于以上因素,存在的問題:因校準起始速度較低(30 km/h),在低速過彎道(如進出站)時,動車組頻繁進行輪徑校準;受線路環境影響,在輪徑校準實施過程中,因校準計算的輪徑值與實際輪徑值出現較大偏差,報出多個MCM(Motor Converter Module,電機變流器模塊)輪徑不合格和防滑故障。
進行輪徑校正步驟:司機點擊IDU上的“輪徑校準”按鈕,按鈕被按下后由黑色變為灰色,待輪徑校準結束后,按鈕顏色由灰色恢復成黑色,如圖3所示。

圖3 進行輪徑校正的步驟
2 輪徑校準不成功對動車組運用的影響
輪徑值校正異常最終經常伴隨著OVP(Over-Voltage Protection,過電壓保護)電阻過熱現象,OVP電阻器的作用是保護變流器模塊中間直流環節。當直流環節電壓超過1 900 V時,MCM(電機控制單元)啟動斬波功能,通過OVP電阻器消耗直流環節多余能量、當直流環節電壓低于1 840 V時,關閉MCM斬波功能。
無論牽引還是制動,系統軟件都需計算出所需的牽引力/制動力,并將所需的牽引力/制動力發送給MCM,MCM計算出相應的扭力值,系統設定的計算公式為式(1):

通過公式可以看出MCM計算的扭力值與輪徑值相關,如果控制單元內存儲了錯誤的輪徑值將直接導致MCM輸出不對應的扭力值。輪徑值偏大會導致MCM計算所需扭力值偏大,所以在MCM輸出牽引力/制動力時實際輸出功率比需求功率偏高,導致MCM反向傳輸至中間直流環節上的電壓值偏高,此時需要從OVP電阻器發熱消耗多余功率,最終引起OVP電阻器溫度超溫。
MCM模塊通過斬波次數結合變流器的工作環境計算OVP電阻溫度,當短時間內OVP啟動次數過多時,MCM報出“OVP電阻器溫度高”或“OVP電阻器過熱”故障[2]。當列車報出“OVP電阻器過熱”故障時,變流器中間直流環節就失去“過壓保護功能”,此時列車為了保護變流器模塊,會通過斷開主斷路器來起到進一步保護作用,最終導致動車組牽引缺失、速度限制,影響動車組正常運行。
3 輪徑校正不成功案例原因分析
2020年5月26日12時30分,某次車(CRH1AA動車組)在其運行區間,隨車機械師發現03車報“需要進行輪徑校準”,通知司機輪徑校準未成功,通過持續的輪徑校正操作后,12時41分發車后輪徑校準成功,影響本列在該區間運緩3 min,如圖4所示。

圖4 故障數據
3.1 車組輪對數據調查
查看2020年05月26日輪對故障動態檢測系統中CRH1A-A動車組過車記錄,發現報出故障單元(01-03車)輪徑值均在規定限度內,同轉向架輪徑差符合要求(其中動車同轉向架輪徑差≤5 mm,拖車同轉向架輪徑差≤10 mm),如圖5所示[3]。
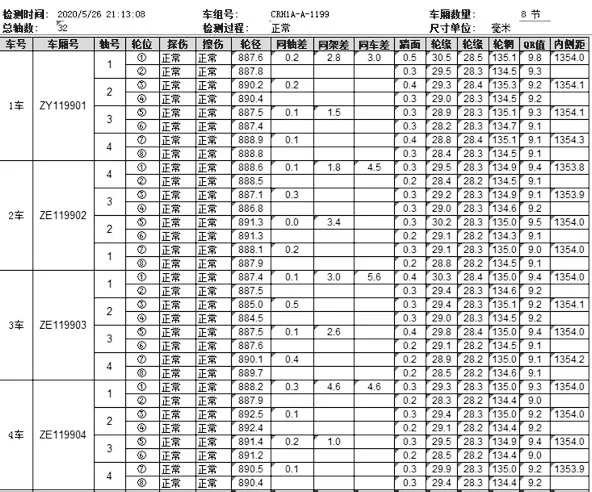
圖5 動車組通過LY檢測數據
查看CRH1A-A歷史旋修記錄,CRH1A-A動車組于2020年1月18日在某動車所完成輪對旋修,報出故障單元(01-03車)上一次旋修記錄輪徑值與最近輪徑值相差最大為0.83 mm,最小為0.3 mm,輪徑值變小為正常運用磨耗。
3.2 線路平直性
故障發生時刻動車組運行于K1 205+000~K1 227+365區 間。通 過 調 閱DMS線 路 數 據發現,在進行輪徑校正的區間坡道情況:K1 205~K1 209區 間 坡 度 為3‰,K1 209~K1 215區間坡度為-5‰,K1 216~K1 217區間坡度為5‰,K1 217~K1 220區間坡度為-4‰,K1 223~K1 226區間坡度為3‰,K1 226~K1 228坡度為1‰,該區段不是平直道存在坡道,影響動車組正常輪徑校準,如圖6所示。
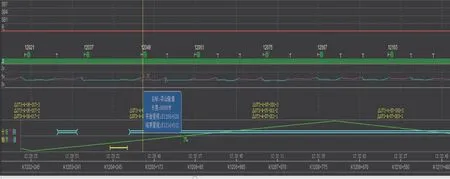
圖6 線路坡度情況
3.3 GPS速度信號有效性
通過數據分析發現區間經過5個區段:隧道①—特大橋①—特大橋②—隧道②—隧道③,動車組在隧道內運行GPS信號弱導致無法準確的進行定位測算,如圖7所示。

圖7 通過線路隧道情況
3.4 運行速度與惰行時間
查看車載數據,發現線上執行輪徑校準時動車組速度值為112 km/h,符合校準速度值要求。但是各個單元組的CCU獨自進行輪徑校準(輪徑校準時間需要30 s),3個單元組輪徑校準無法做到完全同步,會有1~3 s的時間差,司機看到“輪徑校準”按鈕顏色由灰色變黑色和提示Mc1/Md單元組“輪徑校準”成功后,誤認為所有單元組“輪徑校準”都已完成,直接提速行車了,導致輪徑校正未真實完成,如圖8所示。
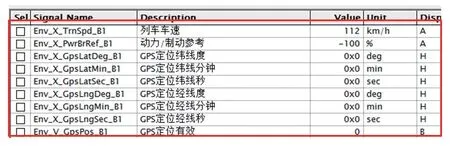
圖8 列車速度和GPS信號情況
綜合以上分析,判斷為區間受線路坡道及隧道影響,同時在操作上無法滿足輪徑校正的條件,未及時完成輪徑校準,導致動車組牽引動力丟失,影響正常的運行速度。
4 輪對故障的處置方式
4.1 線路上處置方式
CRH1A型動車組報出輪徑故障后,應及時進行輪徑校正以消除故障。輪徑校準方法為:在平直的開闊區間(隧道除外),車速在30~130 km/h之間,惰行維持30 s進行校準至動車組IDU上顯示校準完成。校準完成后繼續運行,若校準后仍報輪徑超差,則說明輪徑超差限度已超出輪徑校準范圍,需要維持運行入庫處置[4]。
4.2 入庫故障排查方法
人工復核輪對故障檢測系統的預警和報警數據,進一步判別動車組是否需要旋輪或更換輪對。換輪或旋輪后,確認輪徑數據并根據輪徑調整動車組內的存儲數據。
5 確保輪徑校正成功的對策
5.1 優化動車組輪徑校正啟動邏輯
為避免系統頻繁自動進行輪徑校準,減輕對運營秩序的影響,通過聯合主機廠研究,CRH1A型動車組在新版軟件升級后IDU界面增加“輪徑校準”按鈕進行手動控制。同時將校準的起始速度由30 km/h提高到90 km/h,便于司機的操作。當主控單元組的CCU收到IDU指令后,通過網絡控制總線將該指令傳遞到其他單元組的單元控CCU,單元控CCU對此命令進行記憶,在滿足條件時,會自動執行“輪徑校準”功能。
5.2 改善IDU操作界面的功能
一是將IDU“輪徑校準”按鈕顏色復位功能(由灰色變黑色),由任一單元組“輪徑校準”成功即可復位改為需要所有單元組“輪徑校準”成功。二是對輪徑存儲時間增加3 s延時,存儲后再報出“輪徑校準已完成”,避免因系統延遲導致頻繁操作。
5.3 人工輸入輪徑數據保障系統數據正常
為保障內部默認數據的準確性,在更換輪對、輪對旋修后,或者CCU被初始化、更換后,及時通過專業軟件工具TDS-Uploader和DCUTerm將輪徑值寫入動車組系統內CCU,確保系統默認的輪徑值處于正常情況。
5.4 采集適用輪徑校正的線路數據
輪徑校正需要動車組處于平直線路上和GPS速度信號有效,對線路要求高,目前我段采集運行動車組主要線路共42處適合進行輪徑校正的信息數據,當故障再次報出后可與司機溝通,在合適區段進行輪徑校準,提高輪徑校正的準確性。
6 結束語
文中通過CRH1A型動車組輪徑校準不成功問題進行分析,結合近期典型案例剖析,查找該型動車組軟件上存在的不足并提出優化的建議,有效的提高輪徑校正的成功率,保障了運營秩序。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39