基于三維外形掃描的間隙階差自動評定方法
2022-11-15 03:45:10解文序朱運東林雪竹
長春理工大學學報(自然科學版) 2022年4期
解文序,朱運東,林雪竹
(長春理工大學 光電工程學院,長春 130022)
在傳統的制造業中,設備零部件組裝時,如果零件尺寸誤差較大會導致安裝部件之間存在較大的縫隙,影響部件的外觀、密封、風噪等[1]。為提升產品的質量,必須對裝配的間隙、階差特征做到精確、穩定、有效的測量[2]。傳統的人工測量方法主要有塞尺、面差尺測量等方法,存在效率低、精度差、結果易受主觀因素影響等缺點[3]。近年來,數字化測量技術發展迅速[4],因系統非接觸性、精度高及柔韌性好等優點,廣泛應用于間隙階差的檢測。
目前,國外在間隙階差測量領域發展十分成熟,在激光線三角測量方向表現最為突出。KOSMOPOULOS等人[5]提出了一種立體攝像機的測量系統,利用CCD相機接受反射光以獲取間隙階差信息。TRAN等人[6]開發了一種基于視覺的非接觸間隙和階差測量系統,通過多線結構光發射器和高分辨率相機,采用自適應激光條紋,能夠處理表面復雜、反射性差的目標。相關測量設備有美國Orgin Technologies公司的Laser Gauge系列和英國的Gap Gun產品等。
國內對間隙階差視覺檢測技術的研究也多有進展。嚴成等人[7]采用了一種基于三維激光掃描的檢測方法,提煉出了計算蒙皮對縫間隙階差的數學模型,驗證了計算精度,但此方法僅靠歐氏距離求解,對點云預處理過程要求嚴格,可靠性較差。張波等人[8]提出了一種基于支持向量機的(Support Vector Machine,SVM)三維對縫點云間隙階差提取方法,驗證了算法的精度和穩定性,對曲率過大的點云適應性較差。在間隙階差測量應用方面,國內工業上主要引進國外成熟產品進行應用,自主研發設備少有投入工程應用中。
而在工程實踐中,面對復雜多樣的間隙階差類型,工人需根據經驗判斷模型類別并選取測量方法,這增加了人為操作帶來的不確定性。因此,為了實現間隙階差類型的自動識別與檢測,實現對縫測量的數字化過程,首先,利用工業線結構光掃描系統對部件進行外形掃描,得到對縫點云,再對點云數據預處理,獲取待測部件點云模型;其次,基于三角形頂點法矢估計理論,通過對采樣點一階鄰域三角形法矢加權平均求得采樣點法矢,并對其進行高斯映射聚類,劃分間隙階差類型;最后,提出不同類型的模式點識別方法,通過計算法向夾角閾值,得到待求特征點,建立間隙階差求解模型。通過實驗驗證對縫間隙階差求解的精度及可靠性。整體流程如圖1所示。
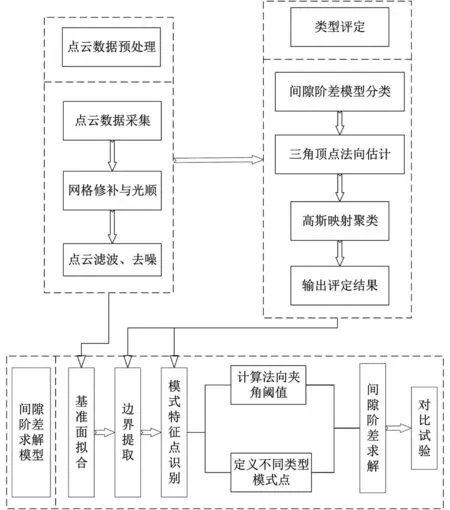
圖1 整體流程圖
1 對縫掃描數據預處理
近年來,點云處理技術是一個發展非常快速的領域,應用于機器人感知、機器人自主精確定位、機器人導航、三維重建、智能駕駛等領域[9]。掃描對縫得到的三維點云數據,受儀器設備、掃描環境及部件結構等因素影響,數據中包含噪點、離群點等雜點,因此,為了獲得高精度符合要求的點云數據結構,需要對采集的數據進行預處理。
1.1 原始網格數據預處理
采用線結構光掃描設備獲取的點云數據為三角化點云,其在工業三維測量領域應用廣泛。掃描儀獲取的數據中伴有雜點或噪聲[10],數據預處理的結果對后續計算起著至關重要的作用。對于超出預定掃描區域的離群數據,借助交互軟件手動去除;對于噪聲數據,采用網格濾波及光順的方法處理;對于存在的孔洞縫隙等采用孔洞修補與邊界縫合相統一的處理方式[11]。通過對三角化網格模型的預處理,得到符合要求的待測點云數據。網格模型處理結果如圖2所示。
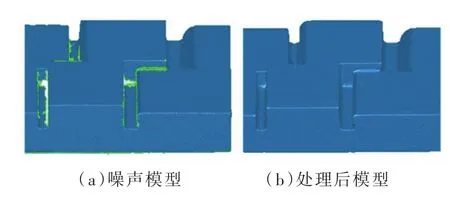
圖2 網格噪聲及處理后模型
1.2 點云濾波處理
不同設備獲取的點云噪聲結構也不同,為了去除點云中包含的雜點,解決重復掃描造成的點云分布不均問題,需采用點云濾波處理。常用的濾波處理方法有高斯濾波、均值濾波與雙邊濾波等。為了實現噪聲去除與數據簡化,采用PCL中的統計分析濾波法(Statistical Outlier Removal)處理原始點云。從三角網格中提取點云的三坐標,對每個點pi,計算它到它的所有臨近點的平均距離Ei,臨近點的數目可自行設置。將得到一個正態分布的數據結果,平均距離在標準范圍(由全局距離平均值和方差定義)之外的點,可定義為重復掃描得到的點云噪點,可解決點云密度分布不均問題。
所得到的三角化點云有序分布,為了更好地進行后續間隙階差模型求解,掃描過程需按照一定規范進行,得到的線式點云模型如圖3所示。
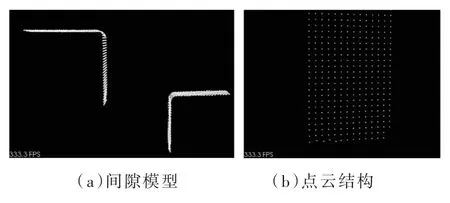
圖3 點云模型
點云結構基本有序,通過后續點云處理,可實現對縫間隙階差檢測。
2 間隙階差評定模型
在進行工業三維對縫間隙階差檢測時,為了減少人為操作帶來的誤差,更好地實現自動化檢測,以三種間隙階差類型為研究對象,通過改進三角形頂點法矢求取方法,基于高斯映射聚類特征識別理論,將單條掃描線點云進行特征識別,通過設定閾值實現模型自動評定。
2.1 對縫類型
按照間隙階差DTS(尺寸技術規范)[12]可知,工業零部件間隙階差通常可劃分為垂直線形、銳角線形、鈍角線形三種類型,如圖4所示。
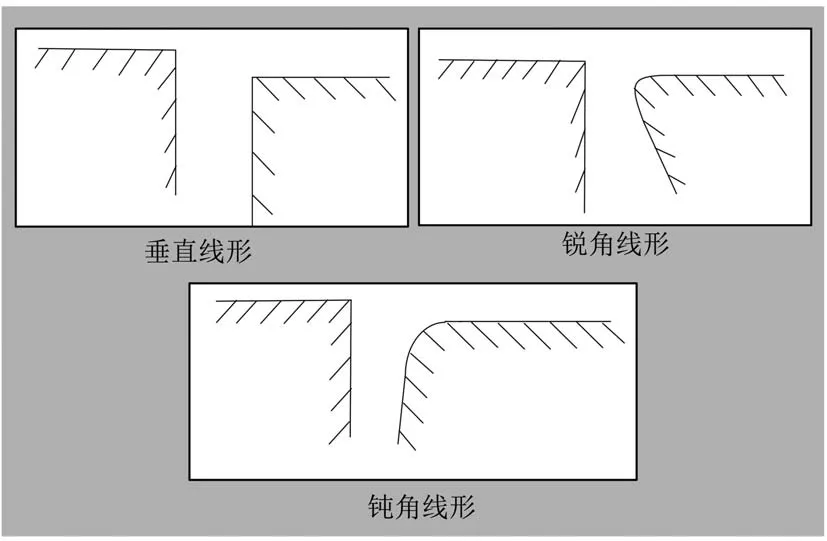
圖4 間隙階差類型
當翻邊角度發生改變時,其計算方法多有不同,所得到的結果也有較大差異,如圖5所示。
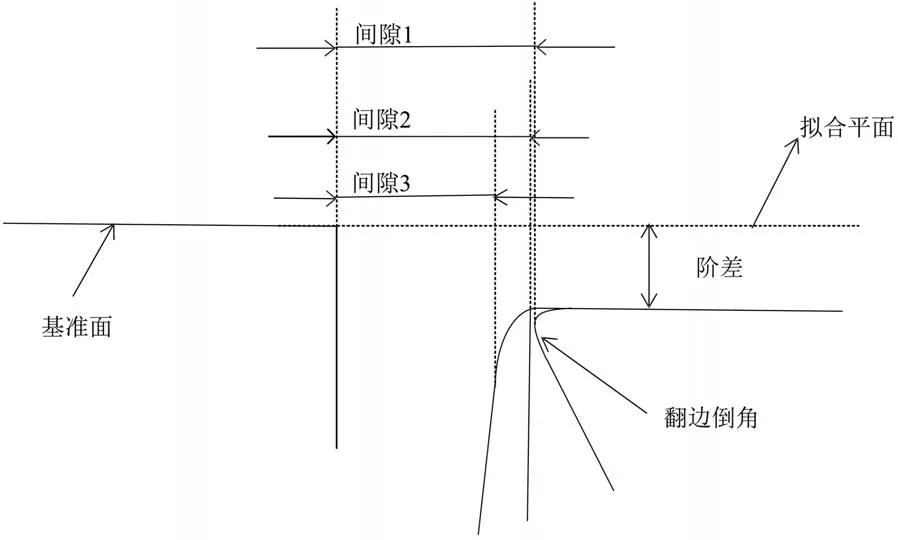
圖5 不同類型倒角的間隙階差計算
圖5顯示了不同翻邊倒角情況下的間隙階差求解算法的區別,不同類型對縫的間隙階差求解差別較大,因此,對不同對縫類型的間隙階差進行識別分類,可求得更加準確的間隙階差值。
2.2 基于法向提取的對縫特征預處理
通過求取數據點一階鄰域點所構建三角形的法矢,求取其加權平均值,可得到采樣點的法矢[13]。依次求取對縫兩側點云法矢。具體過程如下:
(1)將對縫兩側點云劃分為M個包含N個點的區域。依次選取采樣點,分別建立多個以采樣點vi為中心的球體。將球體內的點映射到過采樣點的任一平面上,以任意一點為起始點,按順時針方向依次排序,得到索引集VIP。
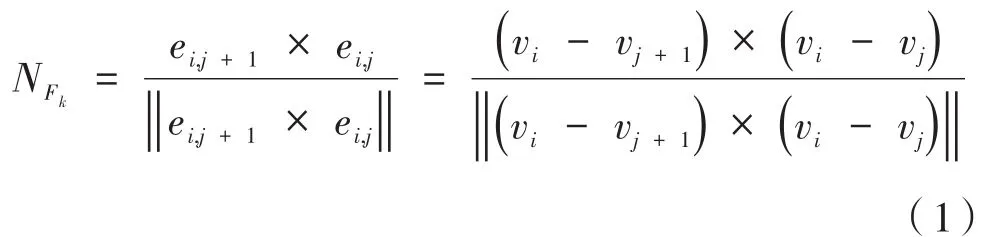
(2)圖6為其中一點vi的一階鄰域,包含N個三角形法矢。其中,Nvi為vi的單位法向量,ei,j、ei,j+1為三角形的兩條邊,NFk為三角形的法向量,Gk為頂點到質心gk的距離。則三角形Fk的單位法矢量為:
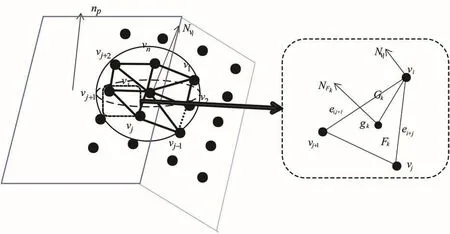
圖6 采樣點一階鄰域頂點法矢估計
(3)可求得任一點vi的單位法向量為:

(4)可求得采樣點的單位法矢ni為:

2.3 對縫模型評定
為了識別對縫特征,將對縫側采樣點的法矢進行高斯映射。文獻[13]等均采用將采樣點鄰域三角形的法矢作高斯映射,得到關于采樣點的特征信息。通過式(3)對采樣點鄰域三角形的法矢加權平均,求得采樣點法矢,并對采樣點法矢做高斯映射聚類,以實現特征識別。
對縫單側采樣點的高斯映射定義為每個點的法矢映射到以原點O為球心,半徑為E的單位球體 S2上[14]。即:

不同曲面上點的高斯映射是不同的:對于平面上的點,高斯映射是一簇;曲面上的點,高斯映射為散亂分布在球體上;對于在兩個曲面交線上的點,高斯映射為兩簇點[15]。對于倒角特征,其映射為球上的圓弧。鈍角類型的點云映射在球面上分布的角度小于90°;銳角類型的點云映射在球面分布的角度大于90°;直角類型的點云映射在球面上呈大致90°的兩簇點,具體效果如圖7所示。

圖7 點云高斯映射
對采樣點進行高斯映射后,因高斯球是以原點O為球心,且其半徑為E,所以采樣點的單位法向量ni即為映射后點坐標pi,對映射后的點進行聚類分析。
設單位高斯球上兩點pk、pl的測地距離為:

其中,k,l∈Ip。文獻[15]中用兩個聚類的平均距離Dc來定義兩個聚類的測地距離:



3 對縫間隙階差求解模型
對縫間隙階差求解過程中,基準面的擬合,邊界點的提取,計算區域的選擇及計算模型的建立,都會對最終結果的精度產生重大影響。
3.1 對縫基準面擬合
對縫兩側表面特征往往很復雜,在間隙階差數據處理的過程中,對于基準面擬合,需要指定區域[16]以減少計算量。在實際工程中,一般待測物體的中心點為坐標原點,前后為x軸方向,上下為z軸方向,左右為y軸方向,在求解過程中,以待測物體坐標軸負方向一側為求解基準面,根據對縫實際情況,沿掃描線方向,初步選取對縫兩側點云各10 mm的點云,y軸方向寬度3 mm,z軸方向10 mm。
對基準面子點云進行平面擬合,為后續模型評定及間隙階差求解做好準備工作。
目前基準面擬合方法主要有穩健特征值法[17]、改進的 RANSAC 算法[18]等。采用一種正交最小二乘法擬合基準面,其以三個方向坐標的殘差平方和作為目標函數來求得最優解,兼顧三坐標誤差[19],在文獻[19]的基礎上改進了擬合方法,通過實驗驗證,該方法對復雜平面具有較強的適應性。
針對間隙階差點云模型實際情況,提出了一種改進的擬合方法,具體步驟為:
(1)輸入點云,根據正交最小二乘平面擬合方法,可得擬合平面α的參數a、b、c的值。
(2)計算點云數據pi到擬合基準面α的距離di:
(3)當di>3δ時,此點被認為是異常點,刪除;反之,保留。
(4)利用所有保留下來的點重新計算a、b、c的值。
(5)重復步驟(3)~步驟(6)過程,直到所有點都在閾值范圍之內。
此時計算得到的擬合平面即為最佳擬合基準面,擬合效果如圖8所示。
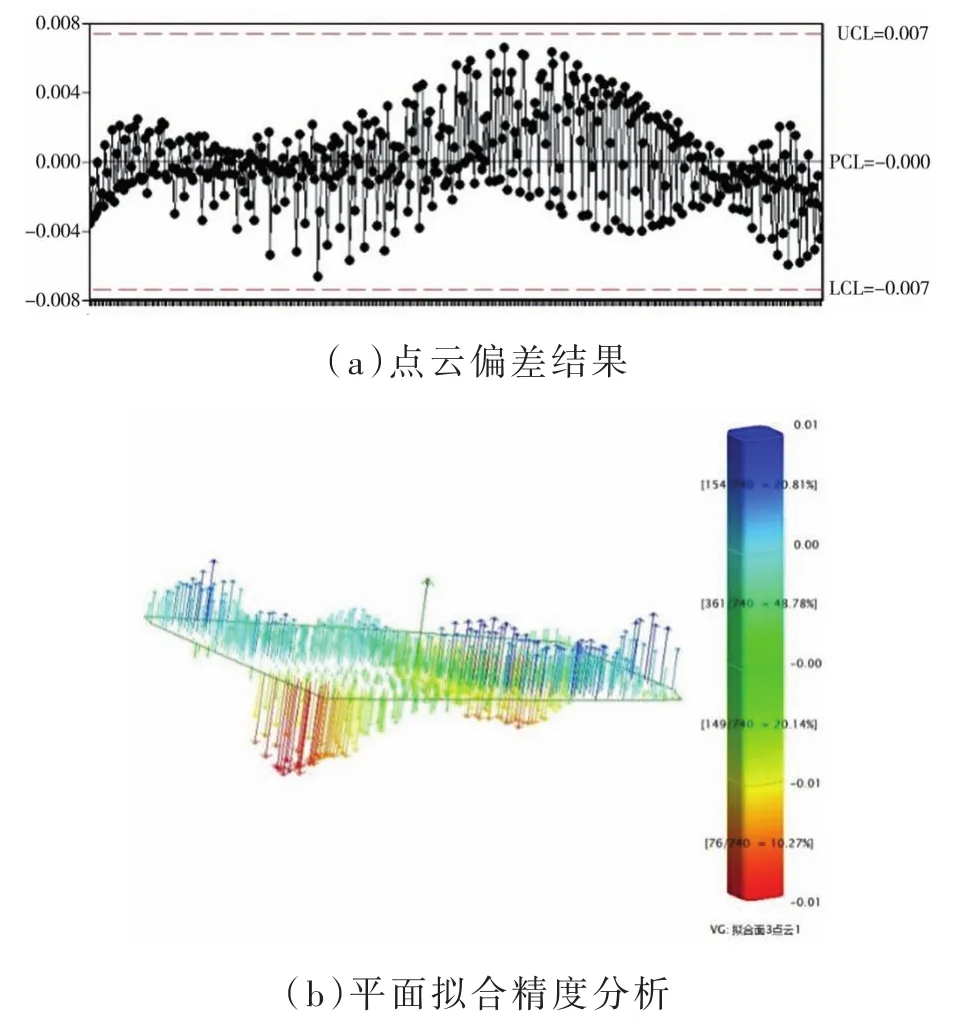
圖8 基準面擬合
圖中UCL代表控制上限,LCL表示控制下線,PCL為控制中心線,δ為標準差。其對應關系如下:
式中,PCL=0,可得基準面擬合精度在0.01 mm以內,符合精度要求。通過此方法獲得的屬于基準面的點用于后續法向計算,可克服基準面不平整的情況,提高了后續模型計算的準確度。
3.2 對縫邊界點提取
對縫邊界點的提取是后續包圍盒及模型自動求解的前提條件,對模型計算精度有著至關重要的影響。
根據上節中求解得到的點云法向,分別計算不同對縫類型基準面中單條掃描線點云法向與基準面法向αp之間的夾角,所得結果如圖9所示。
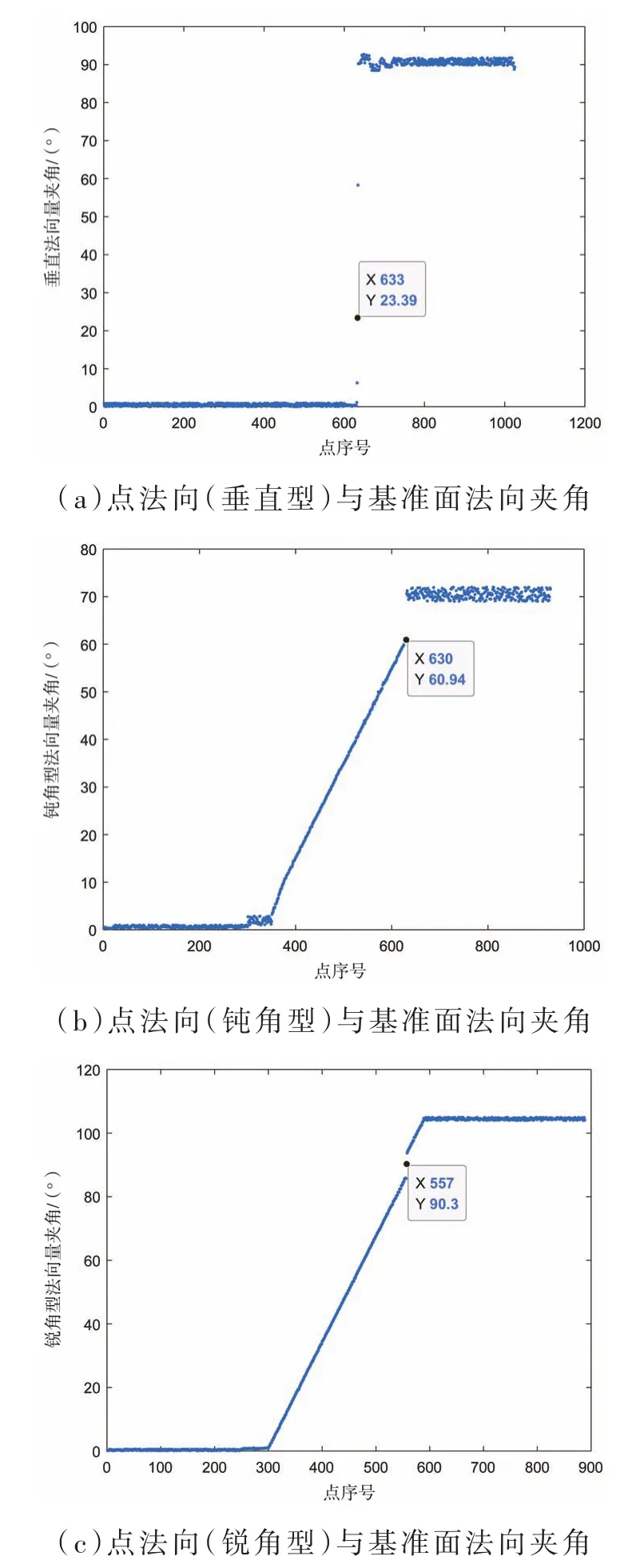
圖9 不同模式點法向偏差夾角
由圖9分析可知:
(1)垂直線形點云在棱角邊界處,點云與基準面法向夾角快速增大,相鄰點之間法向角度相差較大。
(2)鈍角線形點云在邊界處相鄰點法向夾角變化較小,當翻邊角度變化趨于停止時會出現角度拐點,之后夾角值迅速趨于穩定。
(3)銳角線形點云在邊界處夾角變化與鈍角型一樣,在法向角度90°附近極小范圍內會出現變化較大的特征點。
根據圖(9)總結的規則,可快速提取單條掃描線的基準面邊界點。為了實現求解的自動化過程,根據所求邊界點,構建包圍盒[8]進行詳細劃分。
設包圍盒y軸寬度W為15條掃描線間距,x軸長度為L及z軸高度H可根據具體表面情況設置適當閾值,包圍盒最重要的兩個頂點為且滿足H。包圍盒內點滿足xmin≤ x≤ xmax,ymin≤ y≤ymax,zmin≤z≤ zmax,選取基準面任意一個邊界點作為包圍盒坐標原點p,基準面單位法向量為z軸,掃描線方向為x軸,其單位法向量為,可得y軸單位法向根據右手定則可建立其坐標系,將對縫側掃描線沿Y軸由小到大排序,得到掃描線lk~lk+14(0 <k≤m-14),其中m為掃描線總數,k為掃描線序號。于是,可知包圍盒內的點為pi,j(k ≤i≤k+14,0<j<n),其中n表示第一個曲率差大于給定閾值的點序號,包圍盒建立情況如圖10所示。
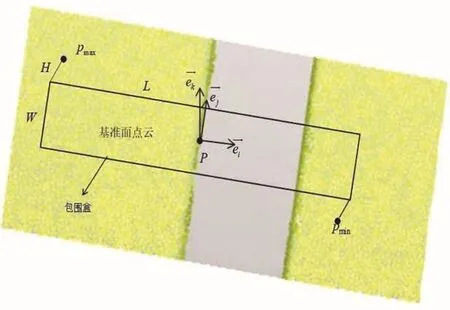
圖10 包圍盒選取待測點云
3.3 對縫求解模式點識別
對縫求解模式點包括點云中的邊界點和倒角處的特征點。
假設pi和pj為模式點,則兩個點的單位法向量ni與nj(i , j<m)的法向夾角余弦值為:

對其進行反余弦計算可求得夾角值為θi,j。
針對點云法向夾角的變化,定義了如下模式點識別方法,具體過程為:
(1)定義模式點識別范圍
包圍盒內掃描線點云序號為pi,j(k ≤ i≤k+14,0<j<n )。定義包圍盒內對縫負方向表面為基準面,將基準面內pk,1點作為初始點。
(2)法向夾角閾值計算
依次計算每條掃描線上屬于基準面(di< 3δ)的點法向與基準面法向夾角,記為θi,j,對夾角從小到大進行排序,夾角最大的點即為基準面上的邊界點(由法向求取方式決定,可參照圖9,將此夾角記為 σi,i為掃描線序號(k ≤i≤k+14)。將σi作為分割基準面與其他相接面的角度閾值。
(3)定義不同類型模式點
識別出閾值后,依次計算掃描線上相鄰兩點間法向夾角,每條線點云都可獲得一個法向夾角序列Xk,m,每一個序列包含2個相鄰點,不同的間隙類型有不同的劃分方式,具體如下:
①對于垂直線形點云:對縫兩側角度閾值σi所確定的邊界點即為模式點h1。h1同時為間隙與階差的特征點。
②對于鈍角線形點云:σi所確定的邊界點即為階差模式點f2;對于間隙求解,以其位于基準面一側為例,計算點云法向夾角。因鈍角上各個位置點處法向變化不一致,當出現Xi,g+1<?i< Xi,g時(?i→ 0),則Xi,g+1所含點pg+1即為所求間隙點g2。
③對于銳角線形點云,階差模式點f3獲取方法同鈍角形點云一樣;對于g3求解,可將其所在線點云中屬于擬合面的點投影到擬合面上,將投影點擬合成直線,擬合直線的方向向量為L,依次求取剩余點法向與L之間夾角,并對其進行比較,夾角最小的點即為模式點g3。
(4)根據上述步驟可得出對縫模式點的識別過程,如圖11所示。
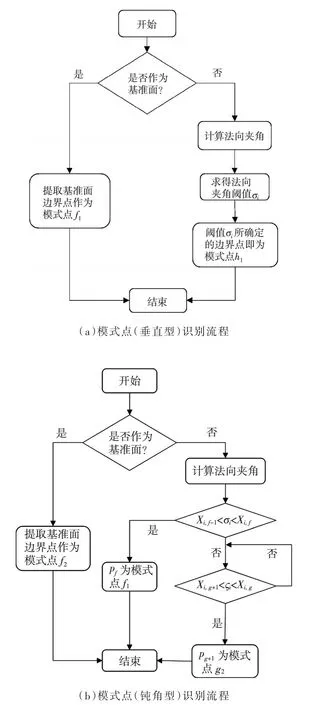
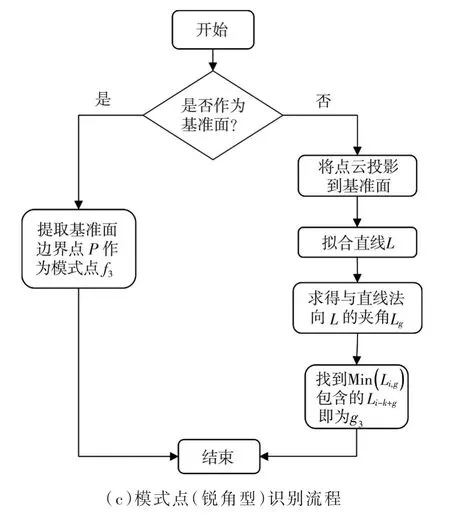
圖11 不同類型模式點識別方法
3.4 模型求解計算
對于模式1間隙階差計算,選取兩平面交點作為特征點計算間隙階差,對應于模式點h1,計算模型如圖12(a)。將間隙兩側模式點h1(x1,y1,z1)、h2(x2,y2,z2)分別投影到基準面α上,得到兩 個 投 影 點 h'1與 h'2,則 h'1、h'2之 間的 距 離 即為間隙值。

掃描線點云之間存在一定點間距a,根據點云結構可知,其最大誤差為2a,所以有:

對于階差計算,為模式點f1到擬合基準面的距離:

對于有翻邊倒角的間隙特征,計算過程同式(16)。模式2為間隙計算模式點圓角根部與下表面的交點g2,模式3為倒角處法向變化最大的點g3;對于階差,計算過程同式(17),模式2階差計算的模式點為 f2,模式 3 為 f3,如圖 12(b)、圖12(c)所示。
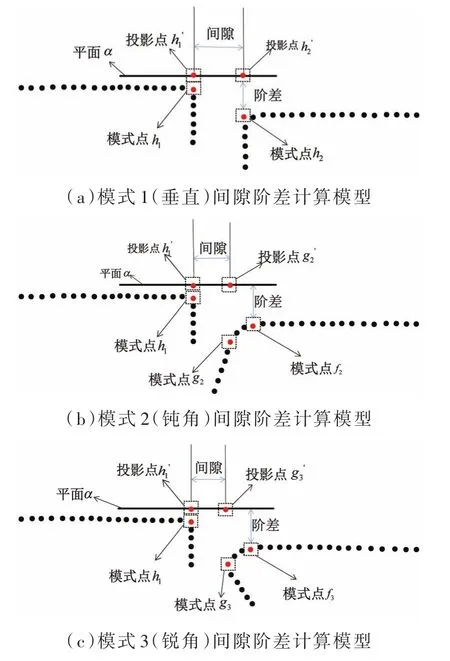
圖12 不同模式間隙階差計算模型
4 實驗與分析
4.1 測量實驗
此次實驗以圖(13)間隙階差標準量塊為測量對象,采用線結構光掃描系統獲取原始數據,精度為0.05 mm,點間距0.1 mm。包圍盒大小定義為寬度W=3mm,長度L=15mm,高度H=10 mm。利用文中提出的方法,可實現間隙階差模型評定及求解。此方法雖然對相應模型具有很強的適應性,但應特別注意間隙階差求解及評定參數閾值的定義。另外,當對縫處實際間隙階差模型非常復雜時,可通過修改包圍盒范圍與調整相應閾值實現求解。
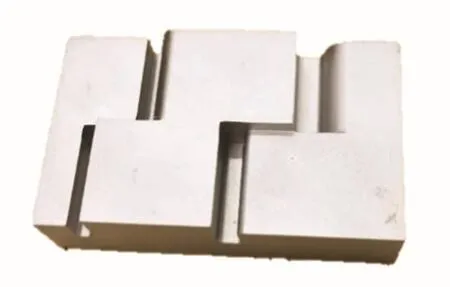
圖13 標準量塊
通過測量求解所得結果如表1所示。
選取包圍盒內15條掃描線,通過求解其平均值作為最終測量結果,減小了誤差,使測量數據更有說服力。通過表1可知,三種對縫模式的階差測量誤差分別達到了0.013 mm、0.019 mm、0.019 mm,垂直線形測量誤差最小;三種對縫類型的間隙測量誤差分別達到了0.022 mm、0.029 mm、0.027 mm,均滿足工業0.1 mm的對縫測量誤差要求。間隙誤差結果比階差整體要大,通過分析求解過程,總結原因有:測量線出現偏差、特征點處點間距與平面上兩點之間點間距有差別、倒角處標準件加工誤差等。

表1 對縫間隙階差求解結果
測量誤差結果如圖14所示。
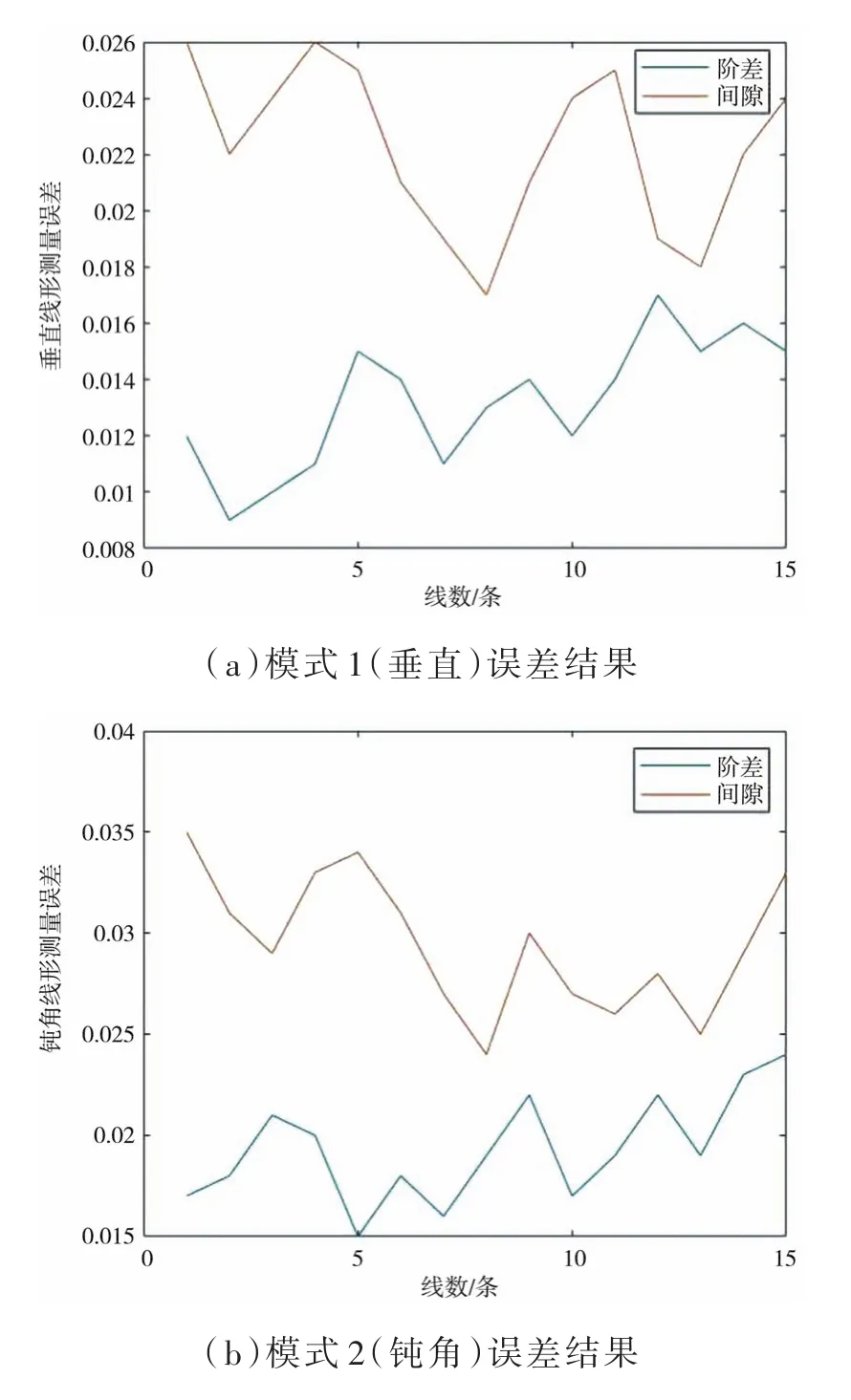
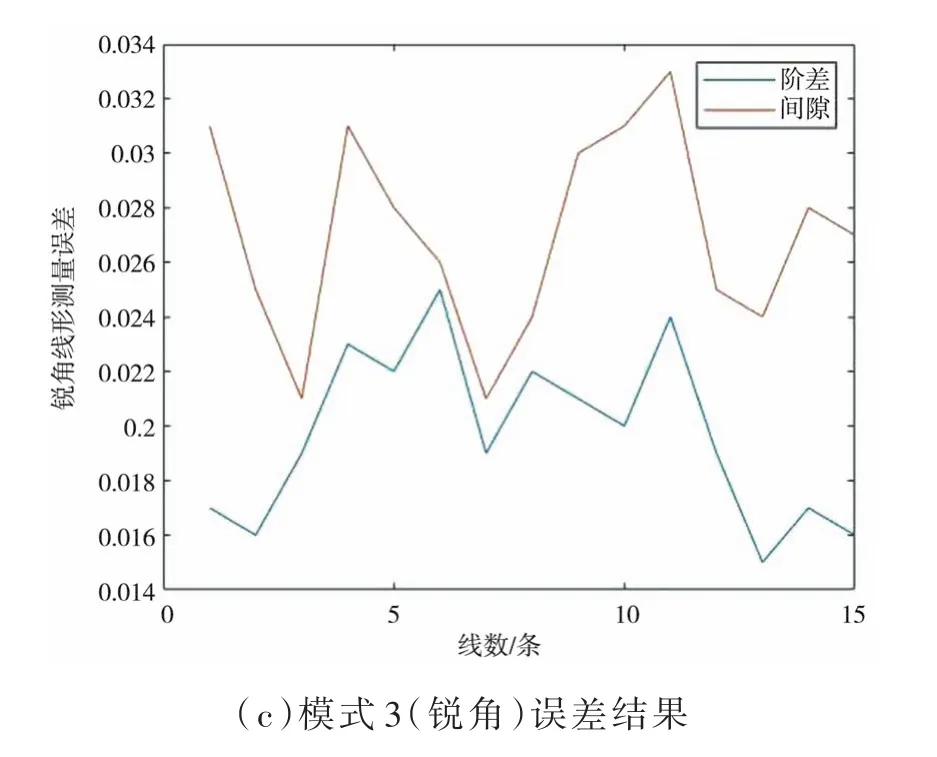
圖14 測量誤差結果
4.2 對比試驗
在工程實際三維測量過程中,為了實現間隙階差的在線數字化測量與分析,往往通過人為經驗判斷類型并選取測量特征點,這將忽視待測部件特征信息,引入誤差,影響最終結果的準確性。將其與文中自動識別方法進行對比,誤差結果圖如圖15所示。
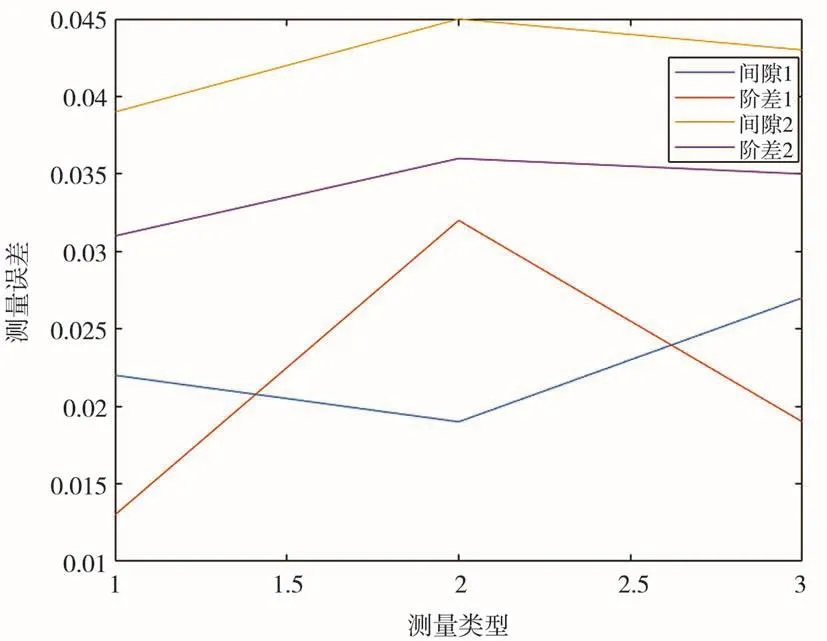
圖15 對比實驗圖
其中1為人工選取特征點所得測量誤差,2為文中自動評定測量誤差。由圖15可知,人工選取特征點得到的測量結果誤差明顯大于文中自動評定得到的結果,證明了文中方法的可行性。
5 結論
文中方法實現了對不同類型間隙階差的自動評定檢測。(1)此方法實現了點云數據預處理,通過網格與點云數據預處理剔除了噪點;(2)實現了采樣點法矢重構,輸出了間隙階差類型評定結果;(3)提出模式點識別方法,實現了間隙階差模型求解;(4)最后通過與人工選取特征點的測量方式進行對比,經過對比分析,文中自動評定的測量方式精度更高。但此方法也受限于多種因素,其中包圍盒的選取、點云預處理過程、對縫側點云結構等因素都會對最終結果產生影響。后續研究可通過機器人路徑規劃、改善操作環境、精確計算特征點間距等提高測量準確度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03