基于機構運動學的機器人標定方法
2022-11-21 13:06:22黃雨晨
技術與市場 2022年11期
關鍵詞:模型
黃雨晨
(景德鎮陶瓷大學機械電子工程學院,江西 景德鎮 333000)
0 引言
準確性是工業機器人的重要性能指標。一般來說,幾何誤差[1]影響到總體定位誤差,這些誤差導致機器人定位精度[2]很低。提高定位精度可以通過運動學標定[3],通常包含建模、測量、誤差識別和誤差補償4個步驟。
本文在機器人運動學標定中同時考慮了連桿誤差和運動副誤差。為了避免不同參考點或線引起的誤差,提出了一種基于離散點擬合運動軸線的方法確定轉動副的固定軸和運動軸,根據軸線的相對位置確定桿長。以六軸噴釉機器人為例,利用辨識出來的軸線建立運動學模型,并對六軸機器人的位置誤差進行了補償。
1 六軸機器人的運動學模型
運動學模型的參數遵循D-H[4]方法。對于每個連桿i都有4個結構參數,當連桿坐標系建立后,這些結構參數也相應地被確定。六軸機器人D-H參數模型如圖1所示,D-H參數表如表1所示。

圖1 六軸機器人D-H模型
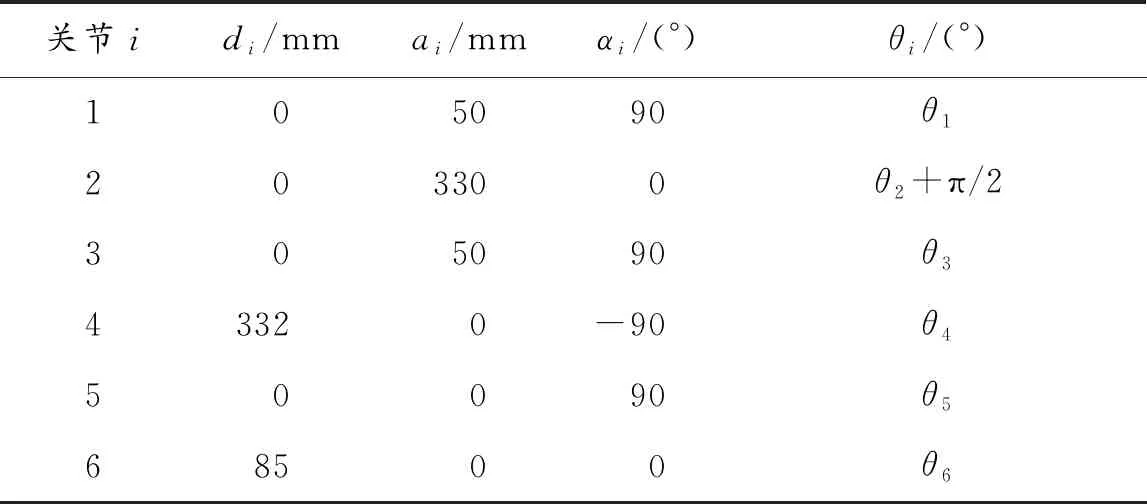
表1 六軸機器人D-H參數
其中d、a、α和θ分別表示連桿偏距、連桿長度、關節扭角和關節轉角。

(1)
式中,θi為轉動副的驅動參數。
2 六軸機器人運動學標定
2.1 離散位置的測量
以六軸噴釉機器人為例,測量一個運動副時,其他運動副鎖定在初始位置。對于每個運動副,選擇10個等間距的離散位置來確定軸線,以一關節為例,對于每個離散位置測量3個非共線的點以中心點為最終位置,對于離散的十點擬合空間圓并確定中心軸線位置。
根據以上步驟可以確定各關節軸線,利用式(2)計算各軸線的相對位置以確定機器人真實連桿長度。
(2)
式中,A表示軸線法向量,C表示中心點位置。
2.2 機器人的誤差識別
分別測量由轉動副R1、R2、R3、R4、R5和R6運動產生的末端連桿的離散點和測量坐標系下坐標系{OH;iH,jH,kH}的移動,末端連桿軌跡LF6(rPF6=[0,0,0]T)用以誤差分析。選擇一個圓形軌跡的10個位置,其標準位置方程為:
(3)
由于誤差,軌跡的位置與標準位置不同。位置和姿態的偏差被認為是機器人的總誤差,由關節臂坐標測量機測量。末端連桿軌跡的方向和位姿誤差如圖2所示。

圖2 末端軌跡的位置與方向誤差
結果表明:機器人的總誤差主要是由連桿誤差引起的,適當補償連桿誤差可以大大提高機器人的精度。與現有的識別方法相比,該方法基于每個轉動副所產生的運動來識別軸線。因此,辨識模型與機器人的運動學模型無關,這提高了錯誤識別的效率,并且不需要為不同的D-H參數分配權重。
2.3 機器人的誤差補償
當連桿剛度足夠大時,連桿誤差是不會隨著機器人載荷的變化而變化的。因此,基于所確定的參數,這些誤差可通過機器人控制系統對桿長參數進行補償。桿長識別前的參數a1、a2、a3、d4分別為50 mm、330 mm、50 mm、332 mm,補償后a1、a2、a3、d4分別為49.83 mm、329.88 mm、50.39 mm、331.69 mm。
補償前后離散點的位置誤差如圖3所示,用以誤差分析的末端軌跡位置誤差在補償后極大地減小。補償后依然存在的誤差,大部分是由于運動副誤差、載荷引起的重復位置誤差和變形造成的。
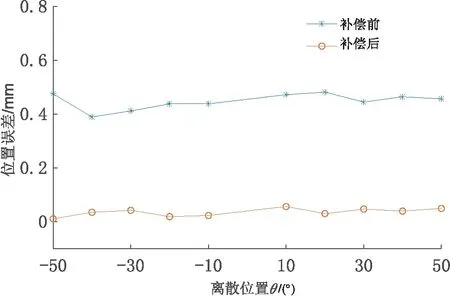
圖3 補償前后的運動誤差
3 結論
本文提出了一種基于機構運動學的機器人運動參數識別方法,建立了包含運動副誤差與連桿誤差的機器人運動學模型,通過測量辨識出機器人運動副誤差與連桿誤差,并對噴釉機器人運動軌跡進行了補償,試驗結果表明了該方法的有效性,由此得出以下結論。
1)建立了包含運動副誤差與連桿誤差的機器人運動學模型。
2)通過關節臂坐標測量儀采集運動連桿軌跡,依次旋轉單個運動副,通過單個運動副軌跡來辨識出單個運動關節的擬合軸線,然后求出相鄰擬合軸線之間的DH參數完成連桿幾何參數辨識。
3)將該方法應用于六軸噴釉機器人的運動學參數補償。結果表明,機器人軌跡圓位置誤差由0.445 4 mm降低到0.027 6 mm,機器人定位精度得到了提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19