基于機載LiDAR的山區(qū)型水庫數(shù)據(jù)底板獲取技術研究
——以烏東德水庫為例
2022-11-24 10:48:42馬玉婷趙林東石永恩馮國正
水利水電快報 2022年9期
關鍵詞:測量
馬玉婷,趙林東,石永恩,談 語,馮國正
(長江水利委員會水文局 長江上游水文水資源勘測局,重慶 400020)
0 引 言
水庫數(shù)據(jù)底板是指水庫蓄水前的原始地形資料,是水庫庫容計算及庫容曲線核定[1-2]、淤積分析計算[3-5]、水資源管理[6-7]、防汛抗旱[8-9]、數(shù)字孿生水利[10-11]、地質災害評估與整治[12-14]、庫區(qū)水域岸線規(guī)劃與利用[15-16]等的基礎資料,是水庫綜合效能發(fā)揮的基礎保障。目前,水庫數(shù)據(jù)底板獲取主要采用全站儀、RTK、航空攝影測量、三維激光掃描等方式進行。水庫多建于山區(qū),因此,研究山區(qū)型水庫數(shù)據(jù)底板獲取技術具有重要意義。山區(qū)地形復雜多變,群山起伏,溝谷縱橫,全站儀結合RTK是當前水庫數(shù)據(jù)底板獲取的主要方式[17-19]。但是,采用全站儀、RTK測繪山區(qū)地形,具有效率低、人工走測難度大、作業(yè)風險大等不足[23-24]。無人機航空攝影測量的發(fā)展極大地推動了山區(qū)地形測繪技術進步,且航空攝影測量具有操作簡便,高精度、高分辨率、高效率等特點,可被廣泛應用[20-22],但采用航空攝影測量具有數(shù)據(jù)處理依賴作業(yè)人員經(jīng)驗、自動化程度低等不足,且航空攝影測量由于影像陰影、云影、植被遮擋等因素,可能造成數(shù)據(jù)精度損失大[25-26]。近年來,三維激光掃描技術也被逐步應用于水利工程地形測繪領域。三維激光掃描技術可根據(jù)作業(yè)環(huán)境及地形特征,選擇地面固定、車載、船載、機載等平臺進行作業(yè)[27-28]。由于山區(qū)地形坡度陡、水陸交通不便利,宜采用機載方式作業(yè)。機載LiDAR(Light Laser Detection and Ranging)是激光探測及測距系統(tǒng)的簡稱,已成功應用于山區(qū)水電工程地形測繪、山區(qū)水利測繪、山區(qū)河道地形測繪[29-30]。因此,本文以烏東德水庫為例,開展基于機載LiDAR山區(qū)型水庫數(shù)據(jù)底板獲取技術應用研究,旨在為數(shù)字孿生流域數(shù)據(jù)底板建設提供技術參考。
1 機載LiDAR技術
本文采用有人直升機機載LiDAR技術開展山區(qū)型水庫數(shù)據(jù)底板獲取技術研究,利用機載LiDAR獲取數(shù)據(jù)生產(chǎn)4D產(chǎn)品(DEM為數(shù)字高程模型,DOM為數(shù)字正射影像,DLG為數(shù)字線劃圖,DSM為數(shù)字表面模型;簡稱4D產(chǎn)品)。機載激光雷達掃描測量技術是集激光掃描技術、高動態(tài)載體姿態(tài)測定技術、高精度動態(tài)GNSS差分定位技術和計算機技術為一體的新型遙感技術。機載激光雷達掃描系統(tǒng)由空中測量平臺、激光雷達掃描測距系統(tǒng)、POS系統(tǒng)、數(shù)碼相機、控制單元等組成。機載LiDAR測量系統(tǒng)以飛機作為觀測平臺,激光測距系統(tǒng)作為傳感器,通過POS系統(tǒng)實時對載體定位確定載體姿態(tài)參數(shù),能通過直接定位快速、準確地獲取復雜地球表面三維空間信息。機載激光雷達掃描系統(tǒng)需要激光雷達掃描測距系統(tǒng)和POS系統(tǒng)保持精確的同步時間,相互協(xié)調完成工作[31-34]。
1.1 作業(yè)流程
機載LiDAR生產(chǎn)4D產(chǎn)品作業(yè)分為航攝準備、數(shù)據(jù)采集、數(shù)據(jù)處理、成果生產(chǎn)4個階段,作業(yè)流程見圖1。

圖1 機載LiDAR作業(yè)流程Fig.1 Airborne LiDAR operation flow chart
1.2 4D產(chǎn)品生產(chǎn)
1.2.1 DEM(數(shù)字高程模型)
利用分類后的地面點云數(shù)據(jù),按一定格網(wǎng)間距插值,生產(chǎn)DEM。
1.2.2 DOM(數(shù)字正射影像)
DOM生產(chǎn)主要步驟如下:① 加載DEM成果,生成數(shù)字正射影像圖DOM;② 勻色勻光,逐一檢查各影像,調整色調,使影像色彩真實,并基本一致;③ 鑲嵌拼接,按照分幅的圖廓范圍外擴10個像素來設定鑲嵌范圍,拼接成整幅的DOM。
1.2.3 DLG(數(shù)字線劃圖)
利用DOM編繪地物,利用地面點云生成等高線、提取高程注記點,人機交互修飾等高線,提取地物、地貌特征高程注記點。
1.2.4 DSM(數(shù)字表面模型)
DSM生產(chǎn)主要步驟如下:① 區(qū)域整理平差。結合POS數(shù)據(jù)提供的外方位元素,在每級影像上進行同名點自動匹配和自由網(wǎng)光束法平差;② 多視影像密集匹配;③ 三維TIN格網(wǎng)構建;④ 自助紋理映射,基于瓦片技術,將整個目標區(qū)域分割成一定數(shù)量的瓦片,將每個瓦片進行紋理貼附,生成DSM。
1.3 精度分析
1.3.1 DOM
DOM精度分析主要為平面位置分析,利用實地檢測地物特征點,與DOM影像中提取特征點進行精度分析,計算如下:
(1)

1.3.2 點云平面
點云平面精度分析方法與DOM一致,計算見式(1)。
1.3.3 點云高程
在實測點附近提取點云對應高程點進行點云高程精度分析,高程中誤差計算見式(2)。
(2)

2 實例分析
2.1 工程區(qū)概況
烏東德水電站位于四川省會東縣和云南省祿勸縣交界的金沙江下游河段,是下游河段烏東德、白鶴灘、溪洛渡、向家壩水電站4個梯級中的第1個梯級電站。烏東德水庫庫區(qū)全長252 km,選擇受蓄水影響,水位抬升較大的壩址-拉鲊河段進行機載LiDAR地形測繪。壩址-拉鲊干流河段長165 km,主要支流包括龍川江12.5 km,勐果河3.4 km,普隆河13.0 km,鲹魚河5.7 km。該河段屬干熱河谷,高溫低濕,河谷深切、河床狹窄、岸坡陡峻,測區(qū)風力大,水陸交通條件差,為保證航攝安全與航攝質量,選擇有人機機載LiDAR進行烏東德水庫數(shù)據(jù)底板獲取生產(chǎn)4D產(chǎn)品。
2.2 精度分析
2.2.1 DOM
DOM精度分布見圖2,DOM精度為0~0.09 m,主要集中在0~0.07 m,DOM中誤差為±0.04 m。SL 197-2013《水利水電工程測量規(guī)范》規(guī)定1∶500~1∶2 000比例尺高山地地形圖平面位置測量允許中誤差為圖上±0.8 mm。按精度要求最嚴格的1∶500比例尺計算,實際平面位置允許中誤差為±0.40 m。由此可知,DOM精度滿足規(guī)范要求。
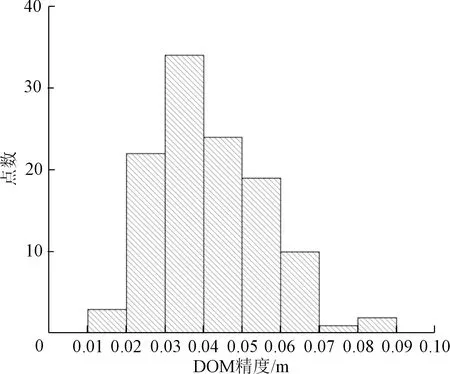
圖2 DOM精度分布Fig.2 Accuracy distribution of DOM
2.2.1 點云平面
點云平面精度為0~0.45 m,主要集中在0~0.35 m,點云平面中誤差為±0.14 m(圖3)。SL 197-2013《水利水電工程測量規(guī)范》規(guī)定1∶500~1∶2 000比例尺高山地地形圖平面位置測量允許中誤差為圖上±0.8 mm。按精度要求最嚴格的1∶500比例尺計算,實際平面位置允許中誤差為±0.40 m,由此可知,點云平面精度滿足規(guī)范要求。

圖3 點云平面精度分布Fig.3 Accuracy distribution of point cloud plane
2.2.2 點云高程
點云提取高程點與野外檢測點較差分布見圖4。由圖4可知,點云高程較差呈正態(tài)分布,數(shù)學期望值接近零,點云高程無系統(tǒng)偏差。點云高程精度為-0.35~0.35 m,點云總體高程中誤差為±0.12 m。SL 197-2013《水利水電工程測量規(guī)范》規(guī)定1∶500~1∶1 000比例尺高山地地形圖高程注記點允許中誤差為±1/3h(h為基本等高距)。按精度要求最嚴格的1∶500比例尺地形圖計算,高山地基本等高距為1 m,1∶500比例尺地形圖高程注記點允許中誤差為±0.33 m,由此可知,點云高程精度滿足規(guī)范要求。
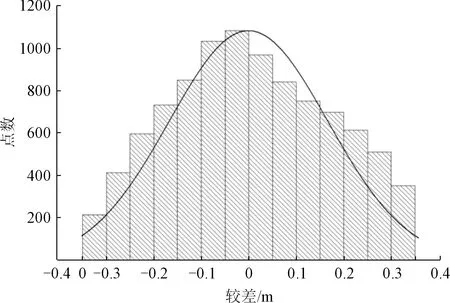
圖4 點云高程差分布Fig.4 Difference of point cloud elevation correction
點云高程精度與地表覆蓋物、地形坡度相關。不同地表覆蓋類型點云高程精度統(tǒng)計見表1。不同地形坡度點云高程精度統(tǒng)計見表2。

表1 不同地表覆蓋類型點云高程精度統(tǒng)計
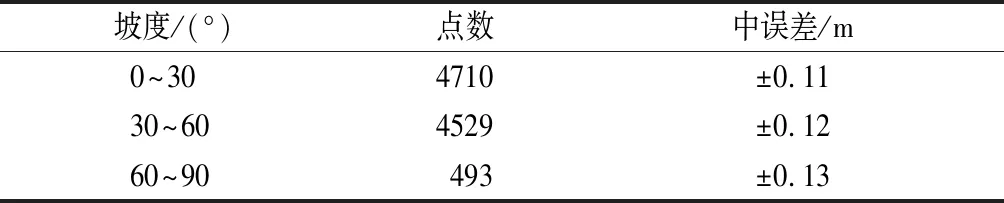
表2 不同地形坡度點云高程精度統(tǒng)計
由表1可知,不同地表覆蓋類型點云高程中誤差近乎相等,可見地表覆蓋類型對點云高程精度影響甚微。由表2可知,隨地形坡度增加,點云高程精度隨之降低,但降低幅度較低,精度均優(yōu)于±0.13 m。
3 結 論
利用機載LiDAR技術,進行烏東德水電站庫區(qū)數(shù)據(jù)底板獲取技術應用研究,構建LiDAR生產(chǎn)4D產(chǎn)品工藝流程,得到結論如下。
(1) 對不同地表覆蓋類型、地形坡度產(chǎn)品進行精度評定。DOM精度±0.04 m;點云平面、高程精度均優(yōu)于±0.15 m。數(shù)據(jù)精度滿足山區(qū)型水庫數(shù)據(jù)底板成果要求。
(2) 形成了航攝準備、數(shù)據(jù)采集、數(shù)據(jù)處理、成果生成的機載LiDAR技術生產(chǎn)4D產(chǎn)品作業(yè)流程,為山區(qū)型水庫數(shù)據(jù)底板獲取提供新的解決方案,對機載LiDAR生產(chǎn)作業(yè)具有參考價值。
(3) 機載LiDAR技術可快速準確獲取地面點云、DOM數(shù)據(jù),構建地表模型,生成地形圖、斷面圖及三維可視化成果,豐富了成果表達,建立的水庫數(shù)據(jù)底板信息檔案為水庫綜合效能發(fā)揮提供基礎數(shù)據(jù)。
(4) 采用機載LiDAR技術降低野外作業(yè)安全風險,提升外業(yè)工作效率,提高測量精度,適用于山區(qū)水庫數(shù)據(jù)底板獲取。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00