含智能網聯汽車的混行車輛通過交叉口研究綜述
2022-11-30 11:41:36陳寶杰張虹霞吳文靜
汽車實用技術 2022年22期
陳寶杰,張虹霞,吳文靜
(長安大學 汽車學院,陜西 西安 710064)
近年來,我國汽車保有量不斷增加,據2021年9月統計,我國機動車數量達到3.90億輛[1],道路中的擁堵問題和環境污染問題日漸嚴重,尤其在交叉口處,“停-走-停”式的狀態幾乎是車輛在運動中不可避免的。這會導致過度的燃油消耗、額外的安全隱患和行程延誤[2]。隨著人工智能、自動控制技術的發展,智能網聯車輛對于提高道路的通行能力和效率成為近年來的研究熱點,智能網聯車輛可以對車輛運動狀態進行分析和預測,采用最合適的軌跡優化策略和引導策略,盡可能地提高交叉口的通行能力,減少環境的污染[3]。本文基于當前研究現狀,總結了目前混行車輛在車速控制策略和交叉口優化方面的研究。
1 混行車輛在信號交叉口處車速控制策略
1.1 車速控制系統
信號交叉口處車速控制系統[4]包括中央控制單元、智能網聯車輛、信號配時信息、通信設施、車載單元等,該系統的通信范圍為300 m左右。其中中央控制單元用于接收并處理車輛信息和信號燈信息,圖1為信號交叉口車速控制流程圖。
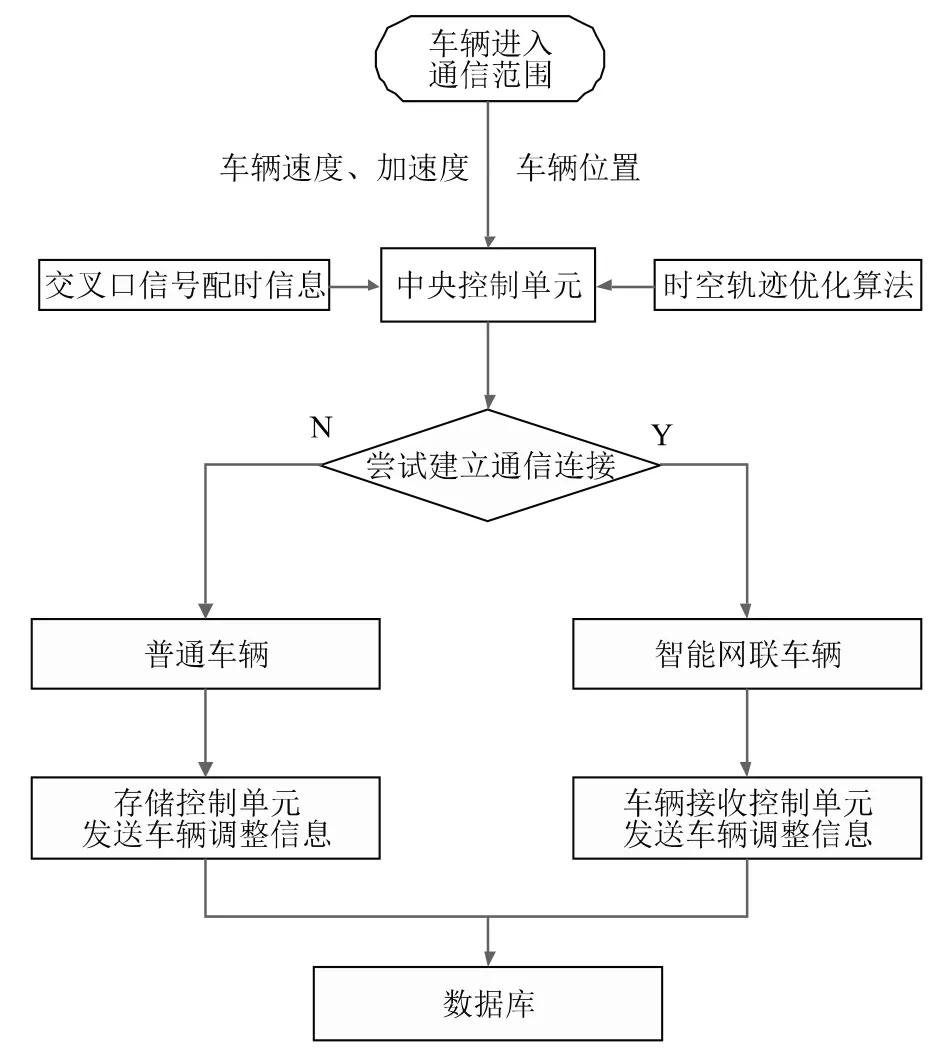
圖1 信號交叉口車速控制流程圖
1.2 車速控制策略
由于智能網聯環境下車輛可以與交叉口控制中心進行實時的信息交互,鹿應榮等人[5]建立了信號交叉口處的車速控制策略,主要分為加速控制模型和減速控制模型。劉歡等人[6]建立了車-路協同環境下的速度引導策略,針對四種情況進行了不同的速度引導,即勻速通過、加速通過、減速通過、跟馳通過。李鵬凱等人[7]通過車路協同技術以交叉口處綜合效益為優化目標,通過單車速度引導策略,提出了多車協同在信號交叉口處的速度引導模型。
ASADI等人[8]提出了一種基于優化的控制算法,通過使用雷達和交通信號信息來調度車輛的最佳速度軌跡,通過優化速度來減少未來車輛的燃油消耗和出行時間。LIU等人[9]提出了兩種基于優化單車或多車行駛時間的速度導引算法,以最小化行程時間為優化目標,對車輛進行速度引導。該引導算法表明,互聯車輛環境下的速度引導可以顯著提高交叉口的交通效率,且多車速度引導策略比單車速度引導策略更有效。
常玉林等人[10]在交叉口處建立主路車優化模型和次路車優化模型,解決了次路車穿越主路車流量較大時交叉口的協同,提高了通行效率。安實等人[11]提出了一種基于多級可變速度限制的交叉口駕駛控制方法,使車輛通過交叉口的軌跡更加平滑,并盡可能地快速通過交叉口。該綠色駕駛車速控制方法有兩種,即頭車速度控制方法和車隊的速度控制方法。
2 混行車輛在信號交叉口處優化設計
在信號交叉口處通過軌跡優化算法引導車輛軌跡,可以實現車道變化和合并時的最小速度變化和最小沖突,提高交通流的穩定性和效率。
信號交叉口的信號燈設計應滿足交叉口的交通量需求,還要合理設置信號燈的配時來滿足各進口道的交通量需求。因此,可以通過信號燈的相位優化、配時優化和空間優化來提高信號交叉口的通行能力。圖2為信號交叉口處的行駛軌跡圖。

圖2 信號交叉口處的行駛軌跡圖
2.1 混行車輛在信號交叉口處軌跡優化
WANG等人[12]提出了一種多交叉口道路中的智能網聯車輛(Connected Autonomous Vehicle,CAV)協同式自主交通組織方法。同時為了適應動態交通需求,提出了一種通過協調道路網絡中CAV的異構決策行為來進行路線規劃的綜合策略。HE等人[13]提出了智能網聯汽車在交叉口處通過基于車道選擇提前給定后以任意車道行駛,通過避免沖突的方法來協調不同方向的車輛。
在CAV環境中,基于V2V和V2I通信,將車輛軌跡進行優化和控制,車輛形成緊密的隊列,HAN等人[14]研究了單個CAV的最優控制策略,設計了考慮各隊列之間相互作用的多隊列車輛通過信號交叉口的控制機制。HE等人[15]為了獲得隊列能量最優速度軌跡,提出了兩種生態駕駛策略,即智能引導車基于加速度策略和手動駕駛引導車的逐步速度策略。
YU等人[16]提出了一個混合整數線性規劃模型來優化CAV環境中單個信號交叉口的車輛軌跡和交通信號,基于優化車輛的到達時間確定準確的車輛軌跡,對于隊列頭車的軌跡規劃,實現了以最小化油耗/排放為目標的最優控制模型。
2.2 混行車輛在信號交叉口處信號配時及空間
優化
交叉口的優化研究目前主要采用宏觀交通仿真、微觀交通仿真和中觀交通仿真三種,其中微觀仿真能夠精確分析路網和車輛在交叉口處存在的問題,更加適合交叉口的研究。常見的仿真軟件有VISSIM和SUMO[17]。
曹潔等人[18]通過考慮相鄰交叉口之間的關系,將自適應遺傳算法引入交叉口子區Agent中代替傳統模型,計算得到最佳配時方案,通過交叉口的平均延誤最短。WANG 等人[19]研究了一種自動信號相位設計生成器,它可以生成初始相位信號,并在必要時自動調整定時,及時使用交互式重新設計策略,調用了一組重新設計的規則,當平均延遲沒有改善時,該過程停止。
為了優化交叉口的性能,交通系統的運行效率,申鑫澤等人[20]從時間與空間方面討論了平面信號交叉口的優化方案。交叉口處增加預信號控制可以緩解交通擁堵問題,合理的預信號控制可以控制車流,車輛的行車區域空間增大,交通量較大時有較好的效果[21]。
3 總結與展望
3.1 總結
(1)信號交叉口處的車速控制策略目前主要是以加速控制策略、減速控制策略為基礎,針對不同環境下對其進行優化,建立更合理的控制策略,在網聯環境下利用多信息交互的特征盡可能的降低車輛的怠速時間,提高交叉口的通行能力。
(2)智能網聯車輛時空軌跡優化系統可以使不同速度、不同行駛方向的車輛進入最優軌跡行駛,車輛間形成緊密的隊列,以自由流速度通過信號交叉口。
(3)信號交叉口優化設計和交叉口配時設計密切相關,相互協調,大多以車輛的怠速時間、車輛延誤、燃油消耗為目標對交叉口進行優化。
3.2 展望
(1)目前在網聯駕駛環境下車輛通過連續性信號交叉口速度控制的研究相對較少,在今后研究中應研究考慮多車協同、多交叉口間的交互、車車交互的車速控制策略。
(2)智能網聯車輛在信號交叉口處的軌跡優化未來可以研究考慮隨機性和換道的動力學模型,考慮多車道交叉口的情況,將軌跡優化與信號配時相結合。
(3)交叉口優化是一個不斷根據實際環境調整的過程,未來需要進一步考慮公交優先的交叉口車道劃分和信號配時設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
