基于PLC的角度自動調整裝置設計?
2022-12-01 03:41:02路耀昌宋建華
艦船電子工程 2022年3期
關鍵詞:支架
張 濤 路耀昌 宋建華
(海軍航空大學青島校區 青島 266041)
1 引言
某裝備的主要功能是通過燈箱中光源發出的光束為飛機提供一定角度的光信號,光束的角度由燈箱的偏轉角度決定,最初設計時只考慮保障單一型號的飛機,燈箱角度通過手動方式進行調整,在保障前將燈箱固定到相應的角度即可,在保障過程中無需再調整燈箱角度。隨著保障任務的多樣性和復雜性不斷提高,目前該裝備需在一個任務周期內保障多種型號的飛機,而不同型號的飛機對應不同的燈箱偏轉角度。手動方式調整燈箱偏轉角度,需要耗費大量的人力,且準備時間過長,保障效率低下,已經不能滿足當前作戰的需求。因此,開展角度自動調整裝置的設計。
2 系統總體設計
2.1 控制對象分析
本裝置的研究對象是實驗室中的某原理樣機,具體如圖1所示,控制對象具體為圖1中豎直方向的燈箱支架,燈箱支架可繞其轉軸進行前后擺動。所謂的角度自動調整就是要對燈箱支架前后擺動的角度進行自動控制,控制過程中假定燈箱支架在左右方向沒有任何偏轉。燈箱支架的重量約為20kg,前后擺動的角度由機械擋塊限制在-12°~+12°之間。
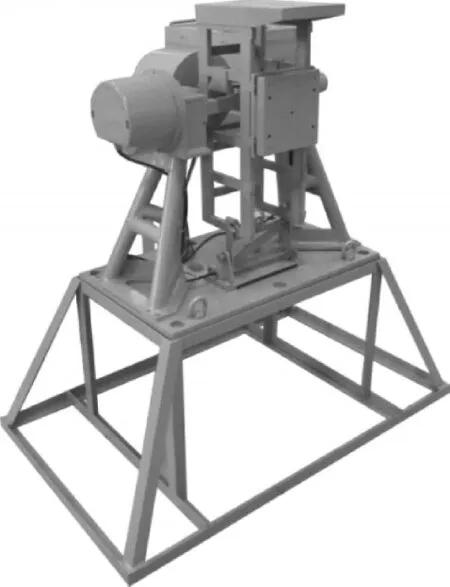
圖1 某原理樣機
2.2 功能需求分析
根據裝備當前的保障需求,結合原理樣機的實際情況,設計的角度自動調整裝置應滿足以下具體要求:
1)設定角可調:為在同一任務周期內保障不同型號的飛機,燈箱支架偏轉角度可在其極限偏轉角度范圍-12°~+12°之間任意設定,設定角度方法要求方便快捷;
2)可自動到位:為節省人力,采用自動調整方式來代替原有的手動調整方式,按下按鈕可使燈箱支架自動到達設定角度;
3)位置精度高:根據裝備燈箱偏轉角度技術指標的要求,燈箱支架實際位置與設定角度的偏差小于等于0.05°;
4)調整時間短:在保證位置精度的前提下,盡可能縮短調整時間,提高保障效率,調整時間要求不超過2min;
5)可到位自鎖:燈箱支架實際角度與設定角度偏差滿足精度要求,且能持續2s以上時間,應立即停止運動,并且能夠鎖定當前位置保持不變,避免燈箱支架因自身重力作用發生位置偏移;
6)可快速復位:當保障任務完成后,不論燈箱支架所處位置如何,按下按鈕后燈箱支架可快速復位,使燈箱支架在20s內回到初始豎直方向;
7)可監測運動過程:為實現對燈箱支架運動全過程的掌握,要求能夠實時顯示燈箱支架當前的角度信息;
8)可手動停止:在燈箱支架運動過程中,可通過按鈕隨時使燈箱支架立即停止運動;
9)避免大幅震蕩:燈箱支架運動過程應平緩,防止出現大幅震蕩對燈箱支架造成損壞;
10)裝置結構簡單,安裝方便,安裝時盡量不破壞現有原理樣機;
11)裝置工作可靠性高。
2.3 總體設計方案
基于上述功能指標,角度自動調整裝置選用PLC作為控制核心,并通過PLC的HMI設計軟件界面,通過軟件界面上的對話框和按鈕來實現相應的控制功能。選用電動機作為燈箱支架的驅動元件,通過PLC控制電機帶動燈箱支架運動,使燈箱支架產生偏轉角度,同時利用角度測量元件實時測量燈箱的角度信息,反饋至PLC系統,從而構成一個閉環控制系統,控制過程如圖2所示。
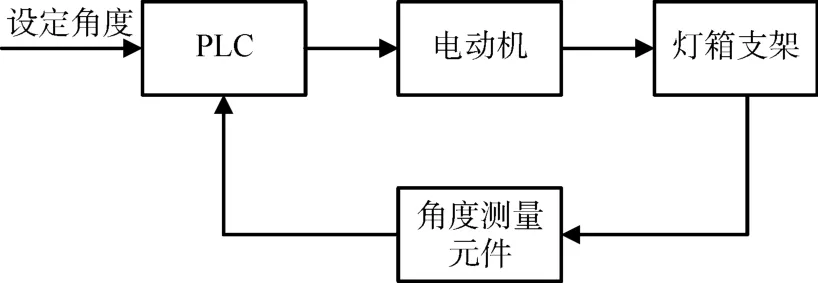
圖2 角度自動調整裝置控制框圖
3 硬件設計
硬件設計主要從PLC控制器、電動機和角度測量元件的選型進行論證,并介紹整個裝置各組件之間的連接關系。
3.1 PLC控制器選型
PLC是針對工業控制設計的微控制器,具有可靠性高、抗干擾能力強、編程簡單易學、安裝簡單、維修方便、體積小、重量輕、豐富的I/O接口、擴展能力強等特點。這些優點使得PLC在自動化生產制造等工業領域中得到了大量的應用[1~3]。
本裝置選用西門子2013年推出的S7-1500系列PLC,無論是小型設備還是對速度和準確性要求較高的復雜設備裝置,SIMATIC S7-1500控制器都一一適應。考慮到本裝置輸入輸出點數較少,利用緊湊型CPU自身集成的輸入輸出模塊即可滿足要求,最終選用1511C-1 PN緊湊型CPU,具體性能指標如表1所示。

表1 CPU 1511C-1 PN性能指標
3.2 角度測量元件選型
目前市面上常見的角度測量元件有角編碼器和傾角傳感器兩種。角編碼器是將角位移或直線位移轉化為電信號的設備,其測量精度高,但是價格高,同時一般直接安裝在旋轉軸上,對安裝要求較高,如果采用角編碼器作為燈箱支架的角度測量元件,安裝角編碼器就要對原理樣機的結構進行破壞,與安裝方便的功能要求不相符;傾角傳感器是運用慣性原理進行測量角度的一種傳感器,又稱為傾斜儀或水平儀,經常用于系統的水平角度變化測量,傾角傳感器使用簡單、體積小、功耗低、安裝方便、經濟實惠,缺點是精度較角編碼器略低。綜合考慮測量精度和安裝條件,本裝置選用精度較高的傾角傳感器作為角度測量元件。對傾角傳感器相關的技術指標要求如下。
1)測量精度
傾角傳感器的精度指標應該滿足裝置功能指標的位置精度要求,即測量精度應小于等于0.05°。
2)測量范圍
燈箱前后擺動角度由機械擋塊限制為-12°~+12°,所以傾角傳感器的測量范圍應大于等于-12°~+12°。
3)通信方式
傾角傳感器測量的角度值由PLC直接讀取,需要選擇與PLC相匹配的傾角傳感器通信方式。CPU1511C-1 PN模塊沒有自帶PROFIBUS接口,如果用RS485或者RS232串口通信方式,需要外接專門的PLC通信模塊,在經濟上不是最優選擇。可以考慮利用PLC的模擬量輸入模塊采集傾角傳感器的讀數,因此,傾角傳感器的通信方式要與模擬量輸入模塊相匹配,為4mA~20mA電流通信方式,4mA和20mA電流分別對應測量范圍角度的上限和下限,并且電流大小與角度成線性關系,可以根據測得的電流值轉化為實際角度值。
4)供電電壓
傾角傳感器的供電電壓選擇PLC相同的電壓DC24V,這樣在硬件連接時就不需要額外外接電源,較為方便,同時還可以實現傾角傳感器與PLC的共地連接,降低干擾影響。
綜合上述指標要求,本裝置最終選用北微傳感生產的BWM428電流輸出雙軸傾角傳感器,技術指標具體如表2所示。
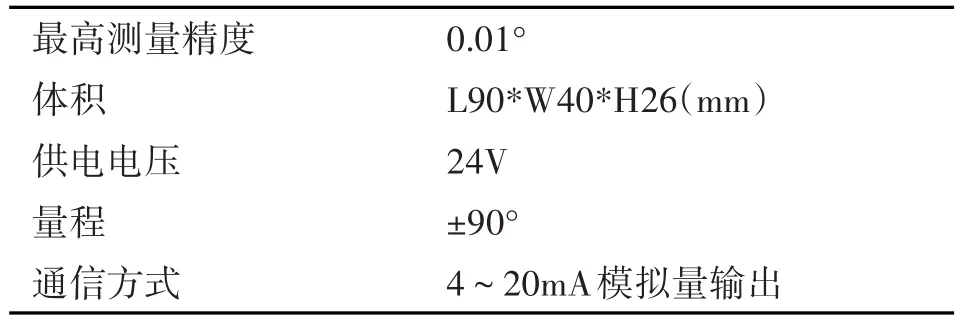
表2 BWM428傾角傳感器技術指標
3.3 電動機選型
根據裝置安裝方便、盡量不破壞原理樣機且到位自鎖的功能要求,選用電動推桿作為燈箱支架的驅動元件,通過推桿把電機的圓周運動轉化為直線運動,進而推動燈箱支架偏離豎直方向前后擺動。對電動推桿的技術要求如下。
1)行程選擇
電動推桿擬安裝位置及相關尺寸具體如圖3所示,其底端固定在原理樣機底部平臺后部的安裝孔內,頂端固定在燈箱支架后面底部橫梁的中間部位,其中燈箱支架轉軸距離支架底部橫梁中心的垂直距離為r=23.56cm,支架底部橫梁中心距底部平臺的垂直距離為a0=23.73cm,安裝孔中心距離支架底部橫梁的水平距離為b0=18.67cm。
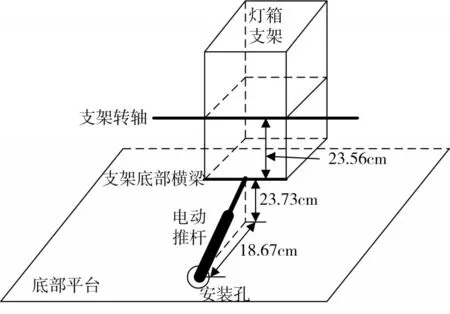
圖3 電動推桿安裝尺寸示意圖
根據電動推桿的初始位置和極限位置來估算推桿的伸長距離。電動推桿的初始位置就是燈箱支架縱軸線在豎直方向時的位置,此時所需電動推桿的長度l0為

當電動推桿推動燈箱支架運動時,電動推桿頂部安裝位置就是轉軸為圓心,以半徑為r做圓周運動。電動推桿的極限位置是燈箱支架縱軸線與豎直方向成12°夾角時的位置,此時推桿頂端距離底部平臺的垂直距離a1、距離安裝孔中心的水平距離b1、電動推桿的長度l1分別為
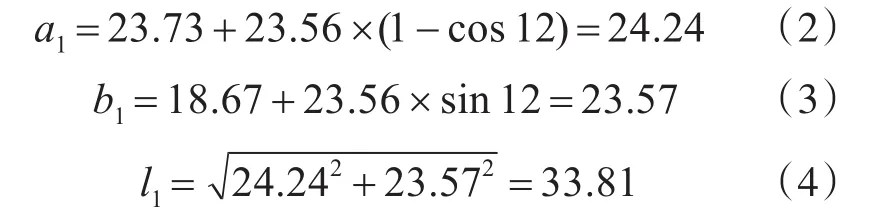
由此可得,電動推桿的最大伸長量為

綜上所述,選擇電動推桿的長度時,有效行程應大于3.62cm,且推桿自身長度與有效行程之和應大于33.81cm。
2)推力選擇
由于燈箱支架的質量約為20Kg,選擇電動推桿的推力應大于200N。
3)速度控制
根據其功能需求,能夠在2min內調整到位,且20s快速復位,燈箱支架從初始位置至極限位置的最大伸長量為3.62cm,由此可推算出推桿的速度范圍應在0.3mm/s~1.8mm/s。
對于普通直流電機推桿來說,其標稱最小速度一般大于5mm/s,雖然可以通過改變PWM的占空比來改變平均電壓的大小,進而控制直流電機的轉速。但是直流電機的轉向是通過雙極性PWM平均電壓的正負進行控制的,由于CPU 1511C-1 PN自身集成的PWM通道是單極性的,用來控制直流電機的轉向不是很方便。而步進電機通過脈沖的頻率來控制電機的轉速,通過相序的調整來改變電機的轉向,利用CPU 1511C-1 PN自身集成的PTO通道以及步進電機驅動器可以方便、精確地控制電機。綜合考慮,選用步進電機作為推桿的驅動元件。
4)供電電壓
為簡化整個裝置的供電關系,電動推桿的供電電壓依然選用與PLC供電電壓、傾角傳感器供電電壓相同的DC24V。
綜合考慮上述技術指標,定制了步進電機電動推桿,技術指標具體如表3所示。
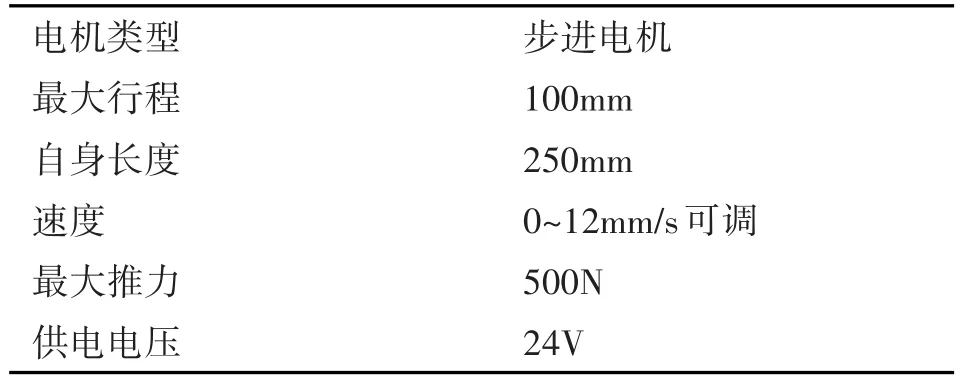
表3 電動推桿技術指標
3.4 裝置整體連接
1)傾角傳感器的連接
傾角傳感器固定在燈箱支架頂部的平面上,安裝時保證安裝面平整,保證傳感器安裝面與被測面完全緊靠,同時應保持傳感器底邊線與被測物體轉動軸線平行,具體安裝如圖4所示。

圖4 傾角傳感器的機械連接
傾角傳感器的電氣接口關系如表4所示。將傾角傳感器的紅色線和黑色線分別與PLC電源模塊的電源正和電源地相連接,由于選用X軸測量方向,將傾角傳感器的白色線和灰色線分別接到PLC模擬量輸入模塊上的信號端和COM端。
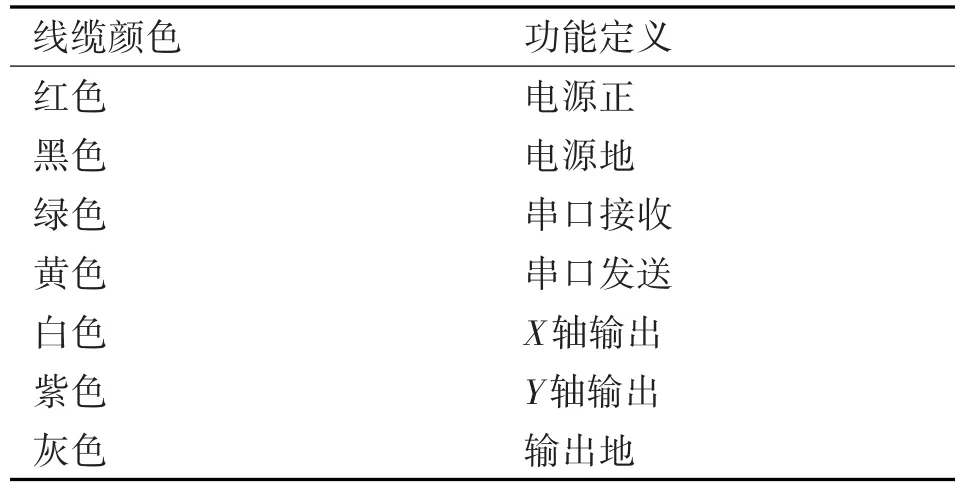
表4 BWM428傾角傳感器電氣接線定義
2)電動推桿的連接
電動推桿的實際連接照片如圖5所示,電動推桿先與步進電機驅動器相連,驅動器再與PLC相連,進而實現由PLC控制電動推桿的目的。PLC與步進電機驅動器之間的電氣連接選擇共陽極低電平有效接線方式,PLC的PTO通道的脈沖端子與驅動器的脈沖控制信號PUL-相連,PTO通道的方向端子與驅動器的方向控制信號DIR-相連。

圖5 電動推桿機械連接圖
4 PLC軟件設計
軟件設計主要從硬件組態、人機界面設計、角度信息讀取、電機PID控制幾個方面進行介紹。
4.1 硬件組態
包含機械的物理驅動器在TIA Portal中映射為“軸”工藝對象。為此,需要組態“軸”工藝對象,根據電動推桿的類型選擇軸類型為“線性”,如圖6所示。驅動裝置類型選擇PROFIDRIVE,選擇激活的PTO通道Pulse_1作為驅動裝置。然后對機械相關的參數和齒輪比,動態默認值,急停參數、軟硬限位設置、回零方式設置、位置監控設置、控制回路等參數進行設置,最后在“軸控制面板”中選擇“激活”按鈕,并“啟用”軸,軸工藝組態完畢[4~5]。
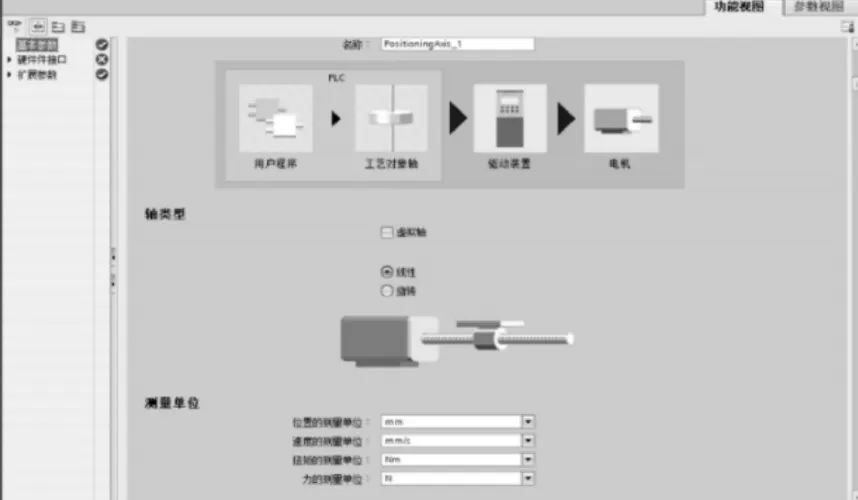
圖6 軸工藝組態界面
4.2 人機界面設計
在項目下添加新設備,選擇HMI,在SIMATIC面板下找到TP700 Comfort,點擊確定,連接PLC,選擇以太網,完成觸摸屏的硬件組態。在編輯界面添加相應的按鈕、指示燈和對話框,并對每一個對象進行功能編輯,設計的觸摸屏界面如圖7所示[6~7],滿足裝置的功能需求,通過軟件界面既可以實時顯示燈箱支架的當前角度,還可以點擊“查看趨勢圖”,得到實際的跟隨曲線,如圖8所示。
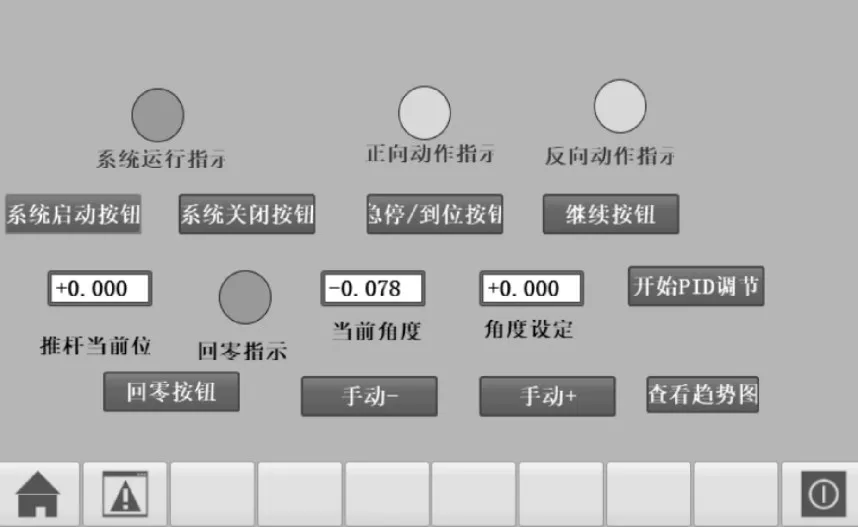
圖7 HMI軟件界面
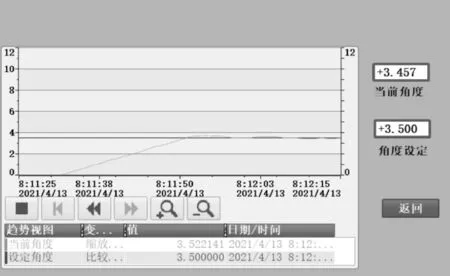
圖8 角度跟隨趨勢圖
4.3 角度信息讀取
利用PLC第二個模擬量輸入通道采集傾角傳感器的模擬電流信息,再通過模擬量縮放轉換指令來將實時的角度信息采集到PLC程序內,如圖9所示。該指令會把采集到的模擬量轉化為一個0~27648的數值,模擬量的大小和采集的電流值成正比例關系,模擬量0對應電流值4mA,對應的角度為-90°,而模擬量27648對應電流值20mA,對應的角度為+90°。再通過一定的比例變換就可以得知傾角傳感器采集的角度信息。
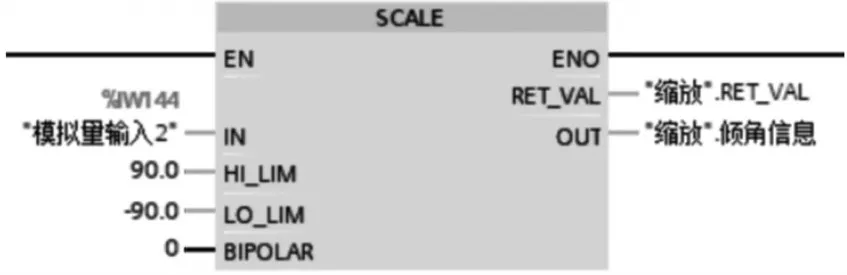
圖9 傾角傳感器采集程序
4.4 電機PID控制
對步進電機采用經典的PID方式進行控制,在編程中具體采用FB41(CONT_C)和FB43(PULSE?GEN)兩個數據塊配合使用從而進行對工藝對象的PID控制。
數據塊FB41(CONT_C)用于在SIMATIC S7可編程控制器上,控制帶有連續輸入和輸出變量的工藝過程,可以激活PID控制器的功能,以使控制器適合實際的工藝過程。數據塊FB43(PULSEGEN)用于構造一個PID控制器,以生成脈沖輸出,在設計中和數據塊FB41一起使用。這兩個數據塊的參數設置分別如圖10和圖11所示。

圖10 數據塊FB41參數設置
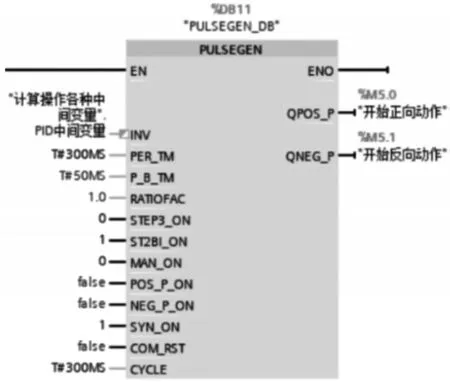
圖11 數據塊FB43參數設置
由于無法對整個裝置建立精確的數學模型,采用臨界比例度法整定PID參數,即在純比例作用下,在控制系統中由大到小的改變調節器的比例度,來誘發出過程控制回路中的等幅振蕩,得到臨界振蕩過程,以得到所需要的臨界比例度和臨界周期的數值。然后再根據經驗公式,計算出調節器各參數的具體數值[8~12]。
將角度設定為3.5°,讓燈箱支架從0°~3.5°自動進行純比例作用下的調整,分別記錄下不同比例增益時的曲線,發現當比例系數為100時,曲線近似為等幅震蕩,如圖12所示。
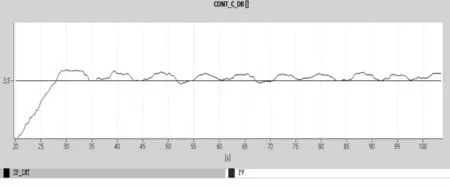
圖12 比例系數為100時等幅震蕩曲線
因此,測得的臨界比例度為0.01、臨界周期為10s,代入相應公式計算得到PID控制器的比例系數為60,積分時間為5s,微分時間為1.25s,按計算得到的參數進行實驗驗證,得到圖像如圖13所示。
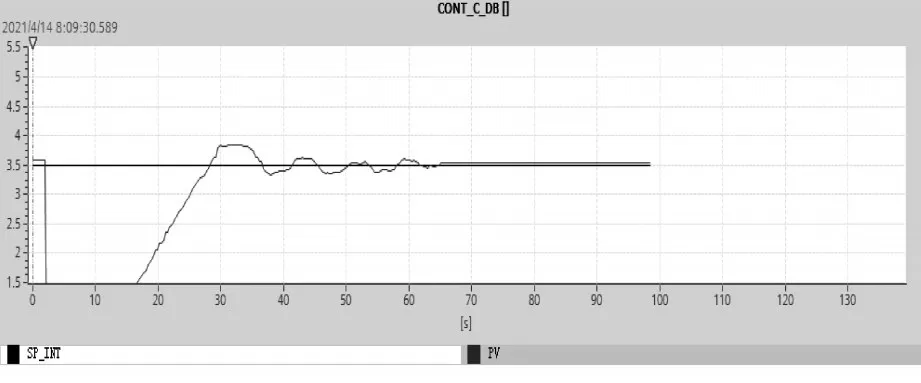
圖13 PID控制曲線
由圖13可得,燈箱支架運動曲線較為平穩,且在1分鐘左右到達設定角度,燈箱支架到位后與設定之間的角度差值約為0.03°,小于所要求的0.05°,能夠滿足裝置的功能要求。
5 結語
本文利用PLC控制器、傾角傳感器和步進電機電動推桿構建了一套某原理樣機的角度自動調整裝置,利用PLC軟件編程設計了操作顯示界面,通過模擬量通道讀取傾角傳感器的實時角度信息,利用PTO通道對步進電機進行PID控制,通過實驗驗證了裝置可在2min內到達設定角度,且位置偏差小于0.05°,滿足設計功能要求,論證了某裝備角度自動調整實現的可行性,并提供了技術途徑。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
