滿足位移要求的偏置式雙肘桿模切機構結構參數優化分析
2022-12-01 00:56:08王君玲李子昂高玉芝郭彩玲
唐山學院學報 2022年6期
王君玲,李子昂,陳 偉,高玉芝,郭彩玲
(1.唐山學院 河北省智能裝備數字化設計及過程仿真重點實驗室,河北 唐山 063000;2.北京理工大學 機電工程學院,北京 100018;3.盛田印刷包裝機械有限公司,河北 玉田 064100)
0 引言
模切機是印后包裝加工成型的重要設備,其工作原理是利用鋼刀、五金模具、鋼線(或鋼板雕刻成的模版),通過壓印版施加一定的壓力,將印品或紙板軋切成一定形狀。網絡購物的流行和物流行業的發展,帶動了紙質包裝印刷行業的興起,紙質包裝需求量不斷提升,市場對高效率、高質量模切機的需求量也隨之與日俱增。模切機構是模切機的核心,目前主流模切機的模切機構主要為平面雙肘桿機構,是單自由度復雜Ⅲ級機構。此機構依據曲柄中心與二肘桿鉸接中心是否存在高度差,分為對稱式和偏置式;依據肘桿兩側曲柄的夾角是否為180°,分為夾角式和非夾角式;依據曲柄位置的不同,又分為內置式和外置式[1]。此外,還有凸輪式[2]和雙滑塊式[3],以及便于數字控制的氣液增壓式[4]等創新型肘桿模切機構,而且它們都保留了增力倍數高的肘桿機械結構。模切機構的工作性能直接影響印刷產品的質量,因此,對模切機構各構件運動規律進行科學分析有助于對此裝置進行優化設計,提高其性能。
劉尊義、羅勇等利用外罰函數法和BFGS變尺度法、轉換機構法等對模切機的雙肘桿機構進行了優化設計和運動分析[5-6]。張天軒、宋榮、李發展、趙小剛等利用三維分析軟件建立的模切機肘桿機構虛擬樣機進行了仿真分析,得出了該機構的運動特性曲線和桿件受力曲線[7-10]。秦培亮等采用對稱布局的結構,設計了一種基于肘桿機構的雙輸出軸電機驅動的數控雙工位臥式沖壓機,并對其進行了仿真分析[11]。余光莉等基于封閉矢量法對雙自由度平面混合輸入機構進行了運動學仿真研究,為平面混合輸入機構的運動分析提供了新思路和新方法[12]。上述研究從不同角度探討了雙肘桿模切機構的運動特性,但大多是針對一個具體結構尺寸進行分析,未能給出該機構各構件運動規律的顯式表達,也未分析主要結構參數對運動規律的影響。因此,本文擬采用矢量復數法和桿長逼近約束條件法建立偏置式雙肘桿模切機構的位移分析模型,從滿足位移要求角度進行結構參數優化,并對優化結果進行仿真驗證。
1 雙肘桿機構位移求解
圖1為平壓偏置式雙肘桿模切機構示意圖。此機構由曲柄1,連桿2和8,肘桿3,4,6,7以及動平臺5,導向塊9和機架組成。其工作原理為曲柄1轉動,通過連桿2和8帶動肘桿3,4,6,7擺動,進而使與上肘桿鉸接的動平臺5在導向塊9的引導下實現模切運動。
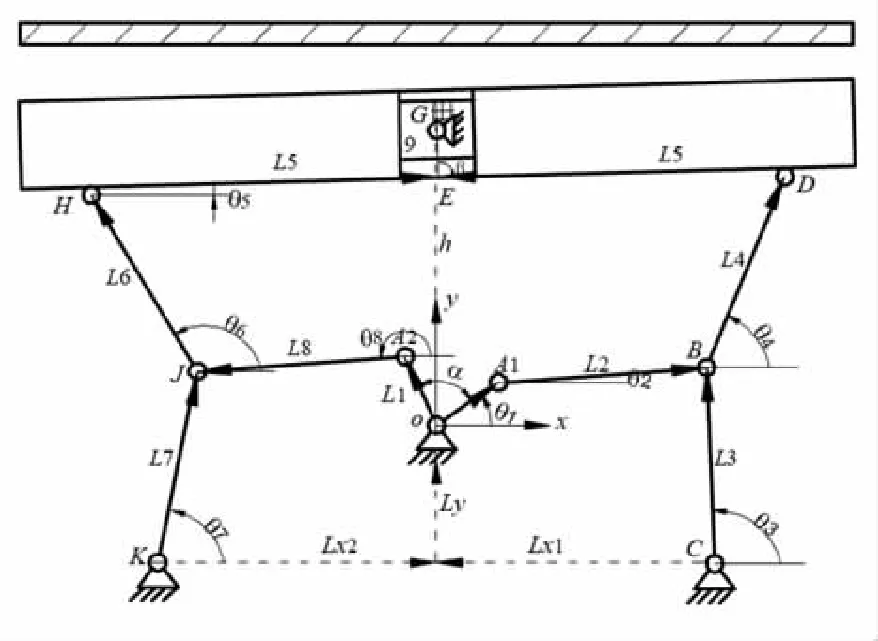
圖1 平壓偏置式雙肘桿模切機構示意圖
不失一般性,取曲柄轉動中心為坐標原點,x軸平行于下肘桿的轉動中心連線,建立如圖1所示的直角坐標系。設L1為曲柄1的長度,L2,L8分別為連桿2和8的長度,L3,L7分別為下肘桿3和7的長度,L4,L6分別為上肘桿4和6的長度,2L5為動平臺兩鉸接副之間的長度,E為DH的中心點,S為動平臺相對于導向擺塊的位移,θi分別為各個構件的角位移,α為兩曲柄夾角,β為動平臺DH與移動導路中心的夾角,并規定各矢量與x軸正向夾角逆時針方向時為正值。
整個機構由兩個Ⅱ級桿組和一個Ⅲ級桿組組成。依據基本桿組拆分和對稱性原則,建立四個封閉矢量圖,對每個矢量圖分別列出矢量方程,可求解相應角位移參數。
1.1 連桿和下肘桿角位移求解
連桿與下肘桿組成簡單Ⅱ級桿組,與機架和曲柄分別組成矢量圖OA1BCO和矢量圖OA2JKO,可直接求得正解。
由矢量圖OA1BCO列矢量方程(1),將其展開得方程組(2),可求解θ2和θ3。
(1)
(2)
令A=(-Lx1+L1cosθ1)2+(Ly+L1sinθ1)2+L22-L32,
B=2L2(-Lx1+L1cosθ1),
C=2L2(Ly+L1sinθ1),
可得:
將其帶入方程組(2),可求得θ3。
同理,由矢量圖OA2JKO可列出矢量方程(3),將其展開得方程組(4),可求解θ8和θ7。
(3)
(4)
令AA=[-Lx2+L1cos(θ1+α)]2+[(Ly+L1sin(θ1+α)]2+L82-L72,
BB=2L8[Lx2+L1cos(θ1+α)],
CC=2L8[Ly+L1sin(θ1+α)],
可得:
將其帶入方程組(4),可求得θ7。
1.2 上肘桿角位移和動平臺位移求解
上肘桿與動平臺、導向塊組成復雜的Ⅲ級桿組,其解析式為含三角函數的非線性方程組,需建立約束條件,用迭代法求解。對于高級機構的求解,主要有回路法、型轉換法、逼近約束條件法等。本文采用虛擬原動件與桿長逼近約束條件法進行求解。首先在鉸接點B和J位置已經確定的條件下,假設導向塊為原動件(即認為其轉角已知),將含有三副構件的動平臺拆分成兩部分,分別與原動件、上肘桿和機架建立兩個封閉矢量圖,按照Ⅱ級桿組方法得到上肘桿角位移與動平臺位移的求解表達式,然后初給一個導向塊轉角值,則可分別得到D點和H點的坐標值。實際機構中D點和H點距離始終保持不變,因此按照‖DH-2L5‖<ε1(誤差精度)的約束條件(桿長逼近)進行迭代求解,同時還需要滿足兩個矢量圖求解得到的兩個相對位移S理論上相等的約束條件,即‖SD-SH‖<ε2(誤差精度)。
由矢量圖OA1BDEGO可列矢量方程(5),將其展開得方程組(6),在假設θ5已知情況下求解θ4和SD。
(5)
(6)
令Y=L1sinθ1+L2sinθ2+L5sin(θ5+π)-h,
X=L1cosθ1+L2cosθ2+L5cos(θ5+π),
c=-L4,
可得:
D點的坐標為:
令M=X2+Y2-L42,
N=Xcos(θ5+β)+Ysin(θ5+β),則D點相對位移為:
而事實上,絲綢具有在醫療、美容、保健等方面的獨特功效和在審美、收藏等方面的文化魅力。在新的科學技術蓬勃發展的背景下,絲綢企業應重視絲綢產品的創新,切實推進桑蠶繭絲綢的綜合利用開發。此外,結合當下興盛的“工業旅游”,絲綢企業借鑒“前店后廠”的模式,完善絲綢體驗區的建設,全方位展示絲綢多功能的形象,打破思維僵局,向世界傳遞絲綢新的消費觀念。
同理,由矢量圖OA2JHEGO可列出矢量方程(7),將其展開得方程組(8),可求解θ6和SH。
L1ei(θ1+α)+L8eiθ8+L6eiθ6+L5eiθ5+
(7)
(8)
令YY=L1sin(θ1+α)+L8sinθ8+
L5sinθ5-h,
XX=L1cos(θ1+α)+L8cosθ8+L5cosθ5,
cc=-L6,
可得:
H點的坐標為:
令MM=XX2+YY2-L62,
NN=XXcos(θ5+β)+YYsin(θ5+β),則H點相對位移為:
約束條件為:
‖DH-2L5‖<ε1,
‖SD-SH‖<ε2。
2 約束條件建立
兩曲柄夾角ɑ<180°的夾角式雙肘桿模切機構在工作過程中,D點與H點有一個高度差ΔD,動平臺有一定的傾斜角度,自前至后,對紙板進行剪切式施力模切,此類型機構可有效克服機構的死點位置,避免“悶車”,適用于對大幅面厚紙、瓦楞紙軋切的模切機機型[1]。本設計應企業需求,采用此類型模切機構。為減少動平臺“上下起伏、左右搖擺”的幅度,一般需限定動平臺轉動角度,為此,以雙肘桿模切機構一個運動周期內動平臺轉角θ5和D點沿y軸方向最大行程無限接近理想值為目標函數,定義目標函數為:
雙肘桿機構左右兩部分的構件尺寸是對稱的,即圖1中L2=L8,L3=L7,L4=L6,Lx1=Lx2,選擇曲柄長度L1,連桿長度L2,下肘桿長度L3,上肘桿長度L4,動平臺長度的一半L5,即X=(L1,L2,L3,L4,L5)T作為優化設計變量。
如果曲柄夾角過小,則機構振動穩定性能差,影響模切質量,不利于高速模切。優化設計依據企業需求,限定165π/180<α<π,此時θ1=θ2,α=π-2πθ1,可作為一個判斷語句加入程序中。
為了使機構增力達到最大,當動平臺處于上限位置時上肘桿和下肘桿應處于近似鉛垂位置,曲柄與連桿處于近似水平位置,為此限定θ3>π/2,-15π/180<θ2<15π/180。在動平臺擺角小的情況下,取β=π/2,再依據曲柄存在條件,列約束函數如下:
g1(X)=L1-L2<0,
g2(X)=L1-L3<0,
g7(X)=Ly-L3<0,
3 實例驗證
依據企業生產對模切機構基座尺寸的需求,給定Lx1=Lx2=405 mm,Ly=230 mm,h=300 mm,β=90°,-0.45°<θ5<0.45°,使用Matlab雙層for循環語句和if判斷語句等編制運算程序,進行參數優化,得到L1=60 mm,L2=323 mm,L3=265 mm,L4=212.25 mm,L5=384 mm,α=170°。動平臺的轉角變化規律如圖2所示,其最大擺角為0.366°;垂直位移變化規律如圖3所示,最大行程為78 mm。圖4和圖5分別是上肘桿和下肘桿的角位移變化曲線。
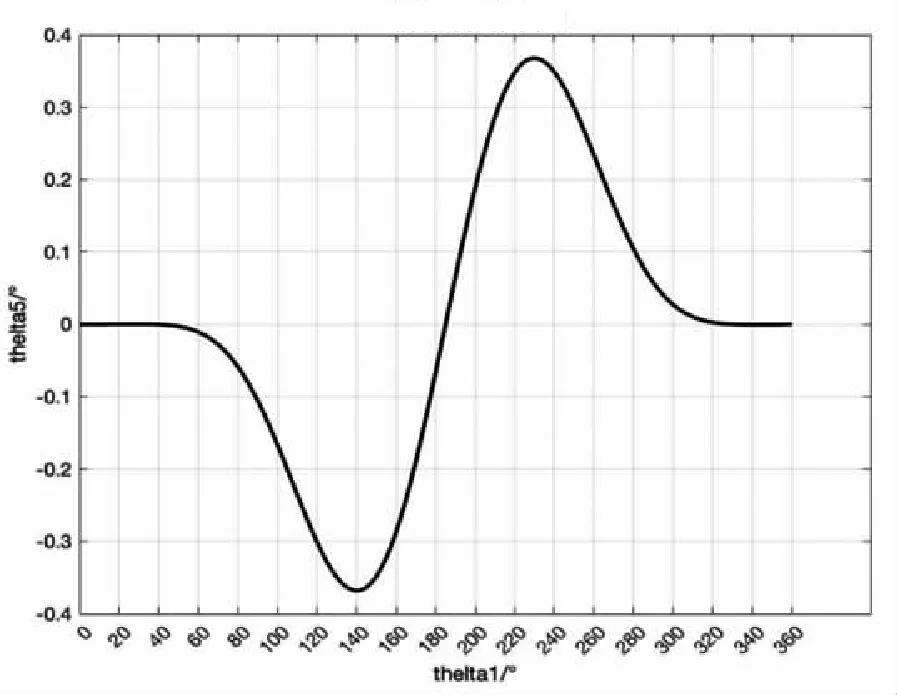
圖2 動平臺轉角變化曲線
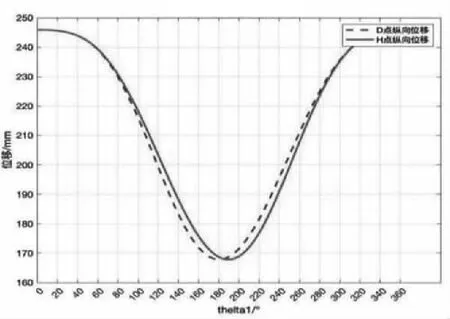
圖3 動平臺垂直位移變化曲線
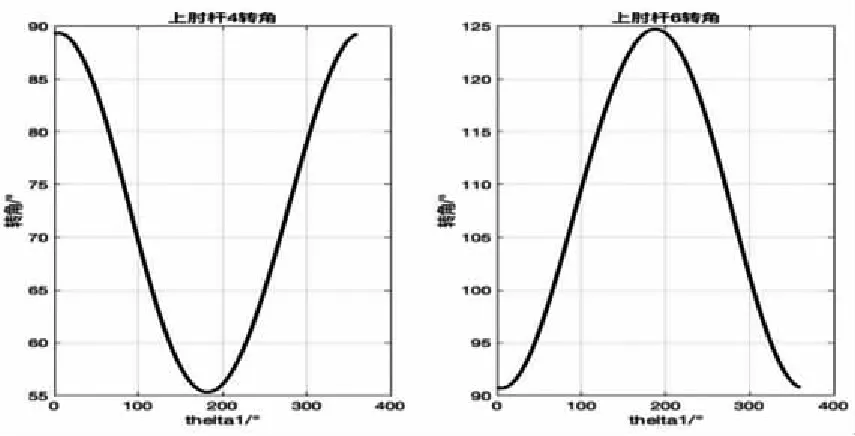
圖4 上肘桿角位移變化曲線
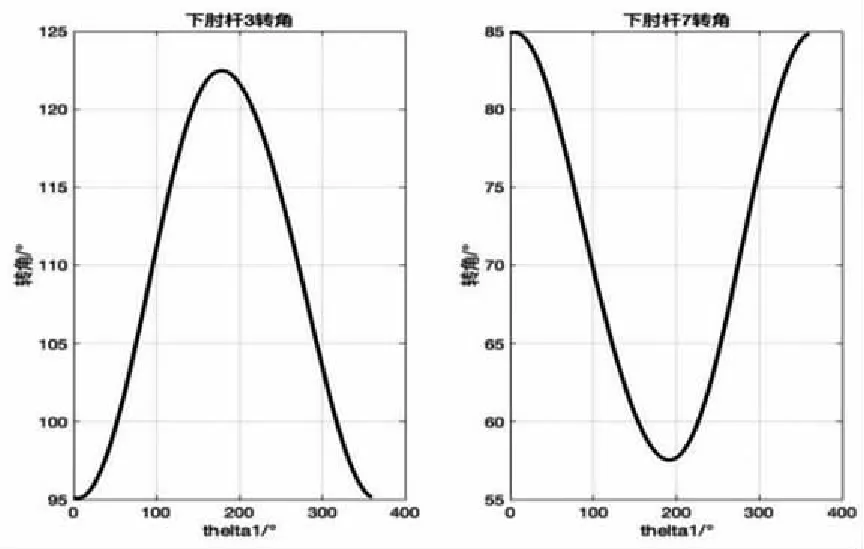
圖5 下肘桿角位移變化曲線
圖2-5的橫坐標均為曲柄的轉角,0°對應曲柄與x軸正向重合位置。當曲柄OA1轉角為5°時,動平臺處于最高位置,其轉角為零,上肘桿角度分別為89.33°和90.69°,下肘桿角度分別為95.09°和84.91°,連桿的轉角位置分別為5.05°和174.95°,均滿足工作要求。
根據優化后的構件尺寸,得到Solidworks實體模型及實物,分別如圖6和圖7所示。動平臺建模后運動仿真結果如圖8和圖9所示,與理論計算結果圖2和圖3基本一致。用優化后的構件尺寸做成的實際產品性能指標能達到預期要求。
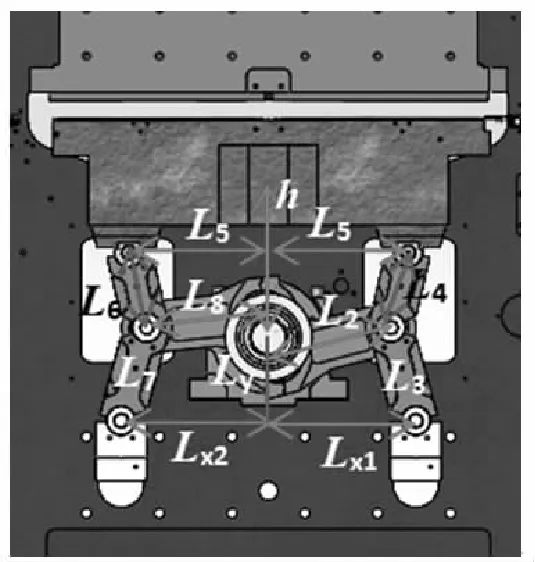
圖6 三維模型
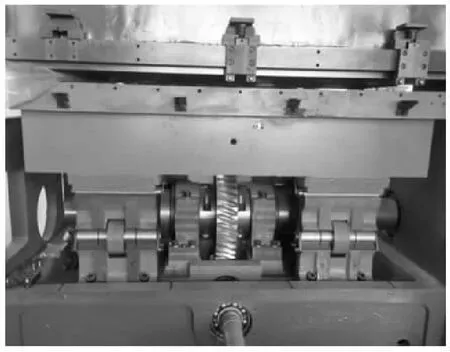
圖7 實物圖
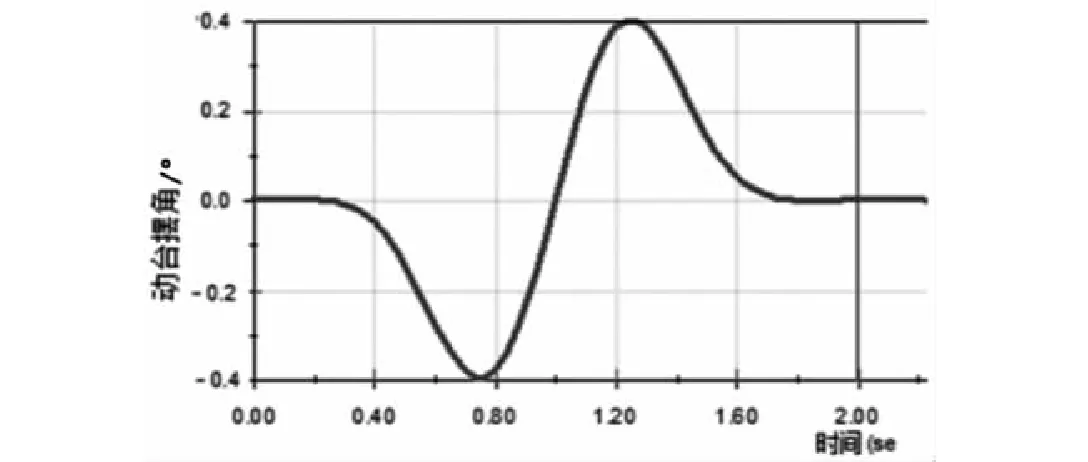
圖8 動平臺實體建模的仿真轉角變化曲線
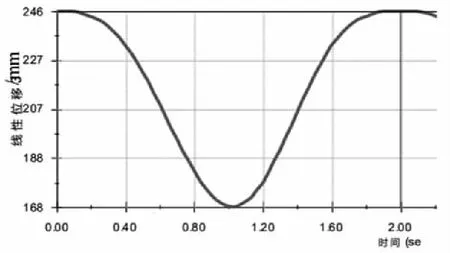
圖9 動平臺實體建模的仿真垂直位移變化曲線
4 結論
本文結合企業實際需求,運用矢量復數法和桿長逼近約束條件法建立了偏置式雙肘桿模切機構各構件位移的顯式表達,以一個運動周期內動平臺轉角和D點沿y軸方向最大行程無限接近理想值為目標函數,從曲柄存在條件、機構在工作過程中對肘桿和工作臺位置要求的角度出發建立約束函數,運用Matlab編程求解,得到符合要求的各構件尺寸。依據優化后的尺寸進行實體建模和運動仿真,仿真結果與理論計算結果基本一致,由此驗證了所建函數與計算程序的正確性。研究成果可為此機構的動力學分析提供理論基礎。