雙繞組永磁同步電機滑模變結(jié)構(gòu)控制
2022-12-03 10:04:10于艷君崔明愷
電工技術(shù)學(xué)報 2022年22期
于艷君 崔明愷 柴 鳳
雙繞組永磁同步電機滑模變結(jié)構(gòu)控制
于艷君 崔明愷 柴 鳳
(哈爾濱工業(yè)大學(xué)電氣工程及自動化學(xué)院 哈爾濱 150001)
雙繞組永磁同步電機通過繞組串、并聯(lián)重構(gòu)能有效提升系統(tǒng)的運行范圍。然而繞組不同模式下的參數(shù)變化造成傳統(tǒng)PI控制器無法滿足系統(tǒng)高品質(zhì)運行要求。該文針對此類電機的運行特點,研究了一種集轉(zhuǎn)速環(huán)控制和抗擾觀測的復(fù)合滑模變結(jié)構(gòu)控制器,有效抑制了電機參數(shù)變化及繞組重構(gòu)引起的轉(zhuǎn)速動態(tài)波動問題。首先,分析了雙繞組永磁同步電機不同模式下的工作機理、繞組重構(gòu)時轉(zhuǎn)速波動產(chǎn)生的原因。其次,設(shè)計了滑模變結(jié)構(gòu)控制器以實現(xiàn)控制參數(shù)的自適應(yīng),快速滿足重構(gòu)瞬間電流關(guān)系以抑制動態(tài)波動。最后,利用小型原理樣機,對采用PI控制器和滑模變結(jié)構(gòu)控制器方案進行了典型工況下的對比實驗,驗證了所提控制策略的有效性和可行性。
永磁同步電機 雙繞組結(jié)構(gòu) 繞組重構(gòu) 滑模變結(jié)構(gòu)控制
0 引言
車輛電傳動系統(tǒng)通常采用電機加變速箱方案實現(xiàn)低速大轉(zhuǎn)矩、寬速域運行以滿足車輛需求,但該方案存在換檔時間長、體積大等弊端。雙繞組永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)利用電子開關(guān)使繞組低速串聯(lián)、高速并聯(lián)兼顧車輛全工況行駛需求,具有寬高效區(qū)、寬速域的獨特優(yōu)勢,是車輛電傳動系統(tǒng)的重要選擇[1-3]。然而該類電機電氣參數(shù)隨繞組串、并聯(lián)模式不同變化較大,并且繞組串、并聯(lián)重構(gòu)過程可能出現(xiàn)較大的轉(zhuǎn)速波動,造成系統(tǒng)動態(tài)性能變差,影響車輛運行的平穩(wěn)性。現(xiàn)有文獻主要集中在繞組重構(gòu)拓撲方面,針對上述問題鮮有研究[2-4]。因此,采用先進控制理論,保證該類電機的高品質(zhì)動態(tài)性能至關(guān)重要。
傳統(tǒng)PI控制器具有結(jié)構(gòu)簡單、易于實現(xiàn)等優(yōu)點,廣泛應(yīng)用于電機控制領(lǐng)域;但其存在參數(shù)自適應(yīng)能力差等問題[5]。為了解決PI控制器存在的問題,Bang-Bang控制、模糊控制、神經(jīng)網(wǎng)絡(luò)控制、預(yù)測控制、滑模控制等現(xiàn)代控制理論被應(yīng)用到高性能電機系統(tǒng)[6-11]。其中,滑模控制對系統(tǒng)參數(shù)和擾動不敏感、動態(tài)響應(yīng)速度快、魯棒性強[12]。利用滑模控制能使轉(zhuǎn)速在有限時間內(nèi)達到給定值,具有更快的收斂速度和跟蹤精度[13];并且利用滑模抗擾觀測器前饋補償能有效提升轉(zhuǎn)矩波動時的動態(tài)響應(yīng)能力,顯著縮短負載突變時的恢復(fù)時間[14-15]。對于滑模控制中常見的抖振現(xiàn)象,通過優(yōu)化控制律可有效解 決[16-18]。基于等速控制律,文獻[16]設(shè)計了滑模增益隨系統(tǒng)狀態(tài)變化的改進型控制律,文獻[17]設(shè)計了滑模增益隨系統(tǒng)狀態(tài)改變的指數(shù)控制律,文獻[18]通過狀態(tài)變量的一階導(dǎo)數(shù)設(shè)計控制律。
繞組重構(gòu)方面,采用電子開關(guān)在極短時間內(nèi)可完成繞組狀態(tài)重構(gòu)。開關(guān)方式有三相斷流切換、三相直接切換、逐相過零切換等[19-21]。斷流切換在重構(gòu)時使電機電流降至0,存在轉(zhuǎn)矩中斷過程;三相直接切換若無法瞬時滿足重構(gòu)前后的電流關(guān)系,可能會造成重構(gòu)瞬間的電流尖峰;逐相過零切換能保證電機有一定的轉(zhuǎn)矩輸出,但重構(gòu)過程中繞組處于非對稱狀態(tài)造成轉(zhuǎn)矩波動并且重構(gòu)過程延長。
通過上述分析,對于該類電機一方面要解決繞組串、并聯(lián)模式參數(shù)不同帶來的控制問題;另一方面要迅速滿足重構(gòu)前后的繞組電流關(guān)系。為此,本文提出并設(shè)計了基于滑模變結(jié)構(gòu)控制的雙繞組電機控制策略。首先分析了雙繞組PMSM的工作機理及傳統(tǒng)PI控制器存在的問題;其次設(shè)計了集轉(zhuǎn)速控制器和抗擾觀測器的復(fù)合滑模變結(jié)構(gòu)控制器;分析了該控制器在繞組重構(gòu)前后瞬間的電流輸出關(guān)系是否滿足繞組重構(gòu)要求;最后在小型原理樣機實驗平臺上進行了對比實驗,實驗結(jié)果驗證了該方法能夠有效提升該類電機典型工況下的動態(tài)性能。
1 雙繞組PMSM系統(tǒng)的工作機理
雙繞組永磁同步電機定子中具有兩套相同的對稱三相對稱繞組,對應(yīng)繞組同相位排布,如圖1所示,兩套繞組的匝數(shù)和參數(shù)完全相同。
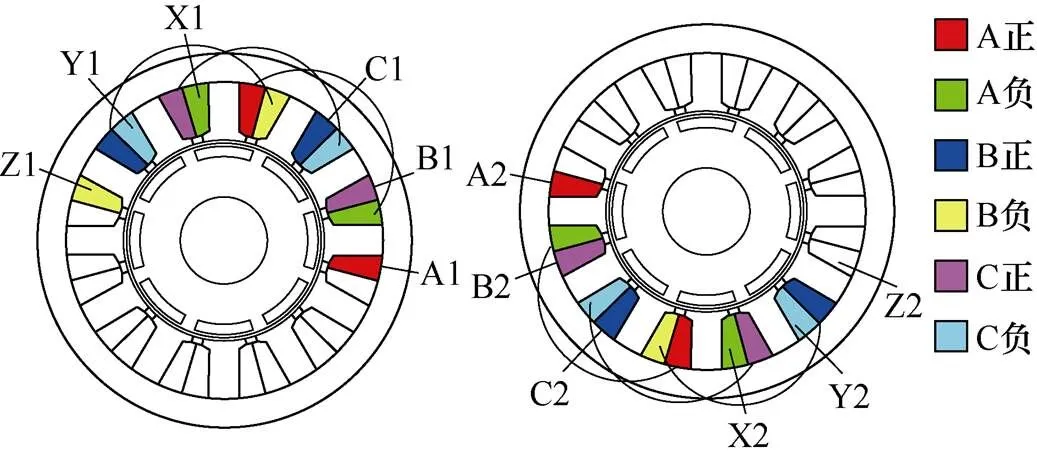
圖1 雙繞組PMSM的繞組排布
將繞組接入重構(gòu)開關(guān),控制重構(gòu)開關(guān)的開關(guān)狀態(tài)可實現(xiàn)繞組串、并聯(lián)狀態(tài)的切換。圖2分別為雙繞組永磁同步電機系統(tǒng)繞組串聯(lián)模式和并聯(lián)模式的拓撲,S1~S3、P1~P6為繞組重構(gòu)開關(guān)。當S1~S3閉合、P1~P6斷開時,兩套繞組運行在串聯(lián)模式;當S1~S3斷開、P1~P6閉合時,兩套繞組運行在并聯(lián)模式。
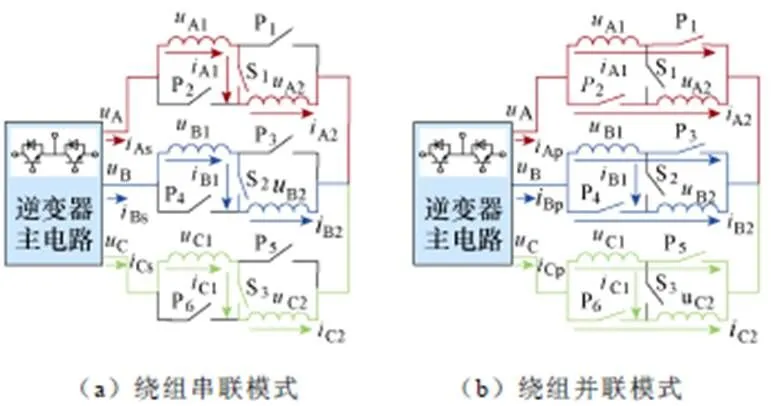
圖2 雙繞組PMSM系統(tǒng)的拓撲結(jié)構(gòu)
一方面,由圖2可得不同工作模式下逆變器側(cè)與電機側(cè)各套繞組電壓、電流關(guān)系見表1。
由表1電壓、電流關(guān)系可知:在逆變器容量一定的情況下,低速時采用繞組串聯(lián)模式,能盡可能地利用逆變器的電流輸出極限,提升轉(zhuǎn)矩輸出能力;高速時采用繞組并聯(lián)模式,能充分利用逆變器的電壓輸出極限,拓寬電機的調(diào)速范圍,如圖3所示。
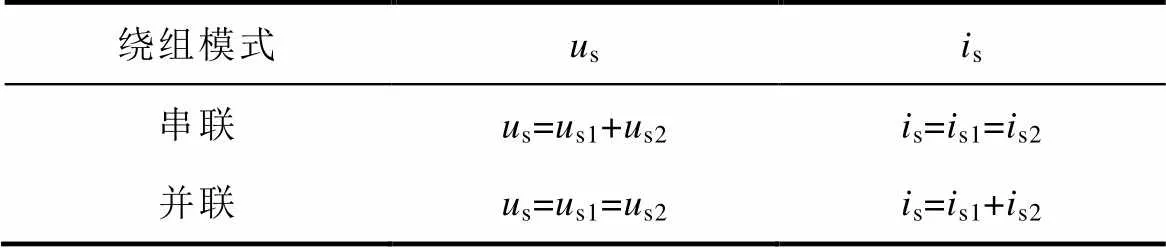
表1 繞組不同模式下系統(tǒng)的電壓、電流關(guān)系
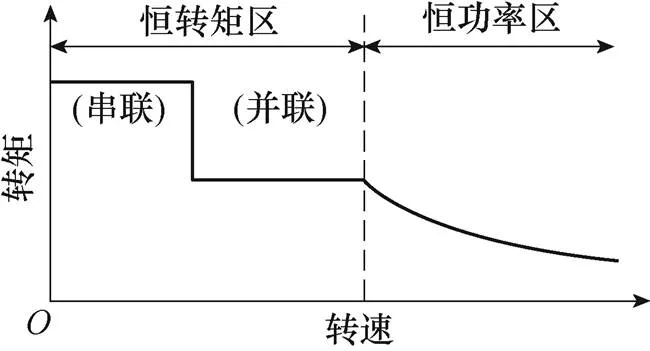
圖3 系統(tǒng)的運行特性[3]
另一方面,由圖2從逆變器側(cè)看,雙繞組PMSM的參數(shù)隨繞組重構(gòu)模式不同發(fā)生較大變化。由于兩套繞組的匝數(shù)和參數(shù)完全相同,根據(jù)電路理論,可得繞組在串聯(lián)和并聯(lián)兩種模式下整體電機相電阻,交、直電感和永磁體磁鏈的基本參數(shù)關(guān)系為
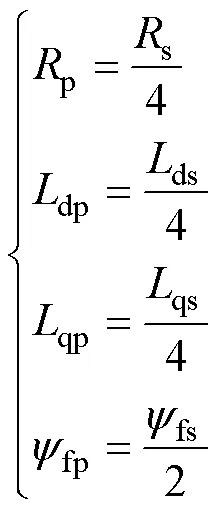
式中,下標s代表串聯(lián)模式;下標p代表并聯(lián)模式。
由式(1)可知:串、并聯(lián)模式下電機參數(shù)不同,勢必對電機高品質(zhì)運行帶來影響,需要采用現(xiàn)代控制方法,以滿足電機運行性能的要求。
從電機側(cè)看,雙繞組PMSM可看作兩套子電機。每套三相繞組產(chǎn)生的電磁轉(zhuǎn)矩為

從逆變器側(cè)看,雙繞組PMSM無論在串聯(lián)或并聯(lián)時均為三相電機,總電磁轉(zhuǎn)矩為各套繞組產(chǎn)生的電磁轉(zhuǎn)矩之和,可得機械方程為


無論為串聯(lián)還是并聯(lián)模式,雙繞組PMSM總電磁轉(zhuǎn)矩均為兩套繞組分別產(chǎn)生的電磁轉(zhuǎn)矩之和。由圖2、表1和式(2)、式(3)可知:在電機轉(zhuǎn)速、負載轉(zhuǎn)矩不變時,繞組串/并聯(lián)時的逆變器側(cè)電流關(guān)系為
式中,第2個下標s代表串聯(lián)模式;第2個下標p代表并聯(lián)模式。
逆變器側(cè)電機電流有效值關(guān)系如圖4所示。為保持電機輸出電磁轉(zhuǎn)矩不變,在繞組重構(gòu)時要求系統(tǒng)能準確、快速地跟隨電機參數(shù)變化,滿足式(4)的電流關(guān)系,否則會引起重構(gòu)前后轉(zhuǎn)速、轉(zhuǎn)矩波動 較大。
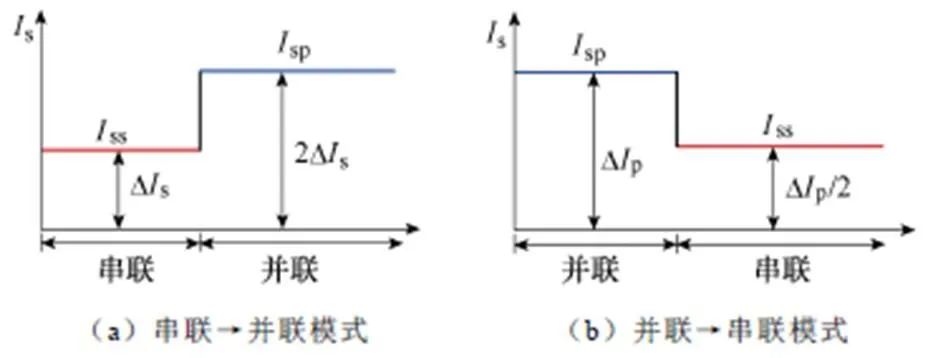
圖4 負載轉(zhuǎn)矩相同時逆變器側(cè)的電流關(guān)系
2 傳統(tǒng)PI控制器的問題分析
基于傳統(tǒng)PI控制器,構(gòu)建雙繞組PMSM的雙閉環(huán)矢量控制系統(tǒng),圖5為系統(tǒng)的傳遞函數(shù)框圖。
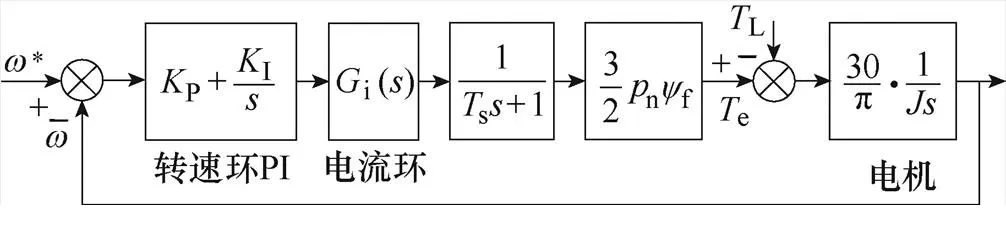
圖5 傳統(tǒng)PI調(diào)節(jié)器下的雙閉環(huán)調(diào)速系統(tǒng)
根據(jù)“振蕩指標法”中的閉環(huán)幅頻特性峰值最小原則,可設(shè)計轉(zhuǎn)速環(huán)的PI參數(shù)為
由式(1)和式(5),可得電機繞組處于串聯(lián)和并聯(lián)時轉(zhuǎn)速控制器的PI參數(shù)關(guān)系為
由式(6),繞組在并聯(lián)模式運行時的PI參數(shù)應(yīng)為串聯(lián)模式下的2倍,需要根據(jù)繞組狀態(tài)設(shè)定不同的PI參數(shù),這是傳統(tǒng)PI控制器在該類電機系統(tǒng)中的應(yīng)用局限性之一。并且采用PI控制器時,轉(zhuǎn)速環(huán)輸出無法快速滿足繞組重構(gòu)瞬間式(4)的電流關(guān)系。例如:由串聯(lián)重構(gòu)到并聯(lián)時,短時內(nèi)逆變器轉(zhuǎn)速環(huán)輸出仍為串聯(lián)時的電流輸出、低于并聯(lián)時對電流的要求,導(dǎo)致電磁轉(zhuǎn)矩不足,造成轉(zhuǎn)速突然降低;相反,由并聯(lián)重構(gòu)到串聯(lián)時,會導(dǎo)致電磁轉(zhuǎn)矩高于負載轉(zhuǎn)矩,造成轉(zhuǎn)速突然升高。
3 轉(zhuǎn)速與抗擾觀測復(fù)合滑模變結(jié)構(gòu)控制
為了解決傳統(tǒng)PI控制器在該類電機控制中存在的問題,本文提出了一種基于轉(zhuǎn)速控制與抗擾觀測復(fù)合的滑模變結(jié)構(gòu)控制策略,圖6為系統(tǒng)結(jié)構(gòu)框圖。圖6中,轉(zhuǎn)速滑模控制器和滑模抗擾觀測器構(gòu)成了所設(shè)計的復(fù)合滑模變結(jié)構(gòu)控制策略,以實現(xiàn)雙繞組PMSM參數(shù)的自適應(yīng)變化;電流分配模塊可根據(jù)實際需要選擇合適的分配方式,諸如采用最大轉(zhuǎn)矩電流比(Maximum Torque per Ampere, MPTA)或d=0等控制方式分配q、d軸的電流分量。
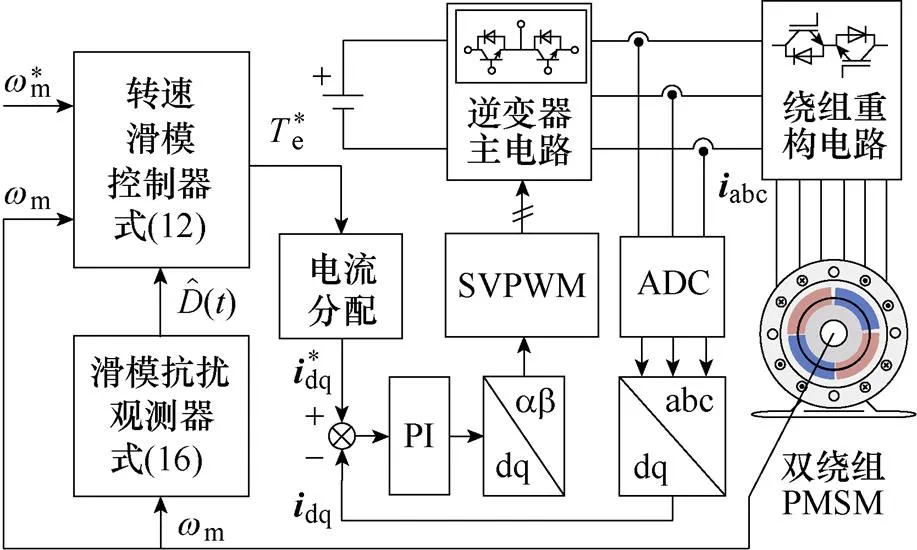
圖6 雙繞組PMSM復(fù)合滑模控制系統(tǒng)框圖
3.1 轉(zhuǎn)速滑模控制器設(shè)計
為滿足繞組各模式下電機的高性能運行,本文設(shè)計了一種轉(zhuǎn)速滑模控制器,并對其滑模面選取與控制律進行設(shè)計。
對滑模面求微分得
將式(3)代入式(8)可得
對于控制律的選擇,為了有效抑制抖振現(xiàn)象,選取改進控制律[16]
將式(10)代入式(9)得
在滑模控制器設(shè)計中,整定控制器參數(shù)確保系統(tǒng)的穩(wěn)定性至關(guān)重要,最為常用的分析方法為Lyapunov函數(shù)法,其穩(wěn)定性判據(jù)為
將式(7)、式(10)、式(11)代入可得
3.2 滑模抗擾觀測器設(shè)計
為提高雙繞組PMSM系統(tǒng)的抗干擾能力,設(shè)計了基于前饋補償?shù)幕_動觀測器。
滑模抗擾觀測器可描述為
同理,增益系數(shù)也需滿足一定條件以保證系統(tǒng)的穩(wěn)定性。由式(15)、式(16)可得方程
由Lyapunov穩(wěn)定性判據(jù)

為使式(19)負定,滑模增益1應(yīng)滿足
因此,1<0,可以選取1為
式中,取>0。
由式(22),可得負載轉(zhuǎn)矩估計誤差方程
求解得
3.3 復(fù)合滑模變結(jié)構(gòu)控制器
由上述分析,可得所設(shè)計的復(fù)合滑模變結(jié)構(gòu)控制器的結(jié)構(gòu)如圖7所示。
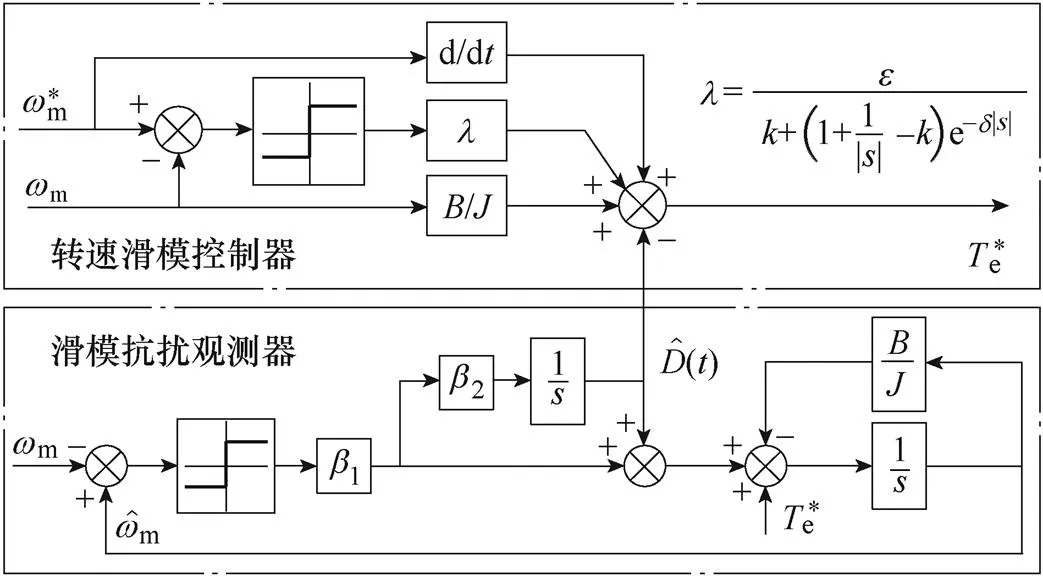
圖7 復(fù)合滑模變結(jié)構(gòu)控制器
用式(16)滑模抗擾觀測器得到的總負載轉(zhuǎn)矩替代式(12)的負載轉(zhuǎn)矩,可得復(fù)合滑模變結(jié)構(gòu)控制器輸出的電磁轉(zhuǎn)矩給定為

繞組串聯(lián)或并聯(lián)時的電磁轉(zhuǎn)矩方程分別為

由上述電機轉(zhuǎn)矩-電流關(guān)系分析,可得繞組重構(gòu)瞬間電流給定值式(27)能迅速滿足式(4)和圖4的電流要求,實現(xiàn)重構(gòu)瞬間的電流參數(shù)自適應(yīng)匹配,有效抑制重構(gòu)瞬間的動態(tài)波動,可以利用直接切換完成繞組串、并聯(lián)狀態(tài)的快速切換。
4 實驗結(jié)果
為了驗證所提滑模變結(jié)構(gòu)控制策略對該類雙繞組PMSM的控制性能,搭建了雙繞組永磁同步電機小型原理樣機的系統(tǒng)實驗平臺,如圖8所示。
逆變器選用TI公司TMS320F28379D套件;重構(gòu)電路采用圖2所示的9開關(guān)拓撲結(jié)構(gòu)。為了滿足繞組電流雙向流動的要求,重構(gòu)開關(guān)選用共發(fā)射極IGBT,由兩個反向串聯(lián)的IGBT器件構(gòu)成,如圖9所示。實驗時選用英飛凌FF300R12KE4_E型IGBT。

圖8 實驗平臺
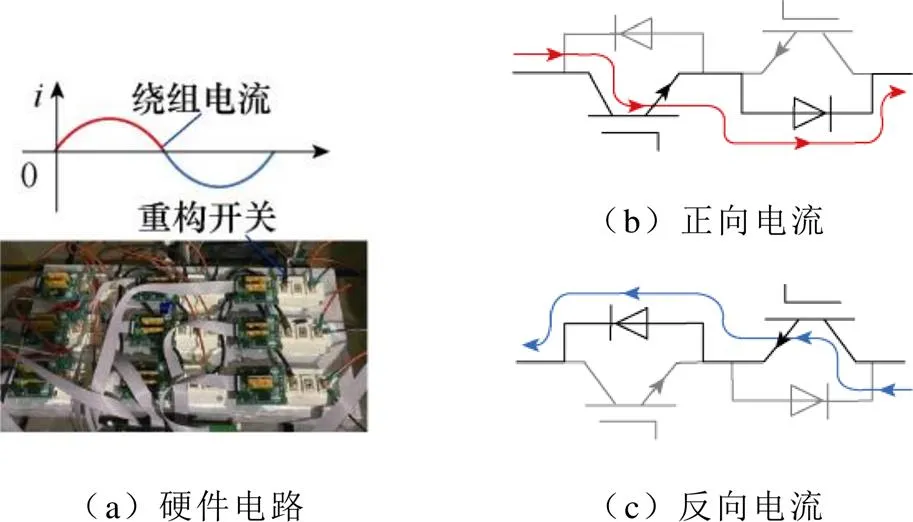
圖9 重構(gòu)開關(guān)的電流流向
小型原理樣機的主要參數(shù)見表2。
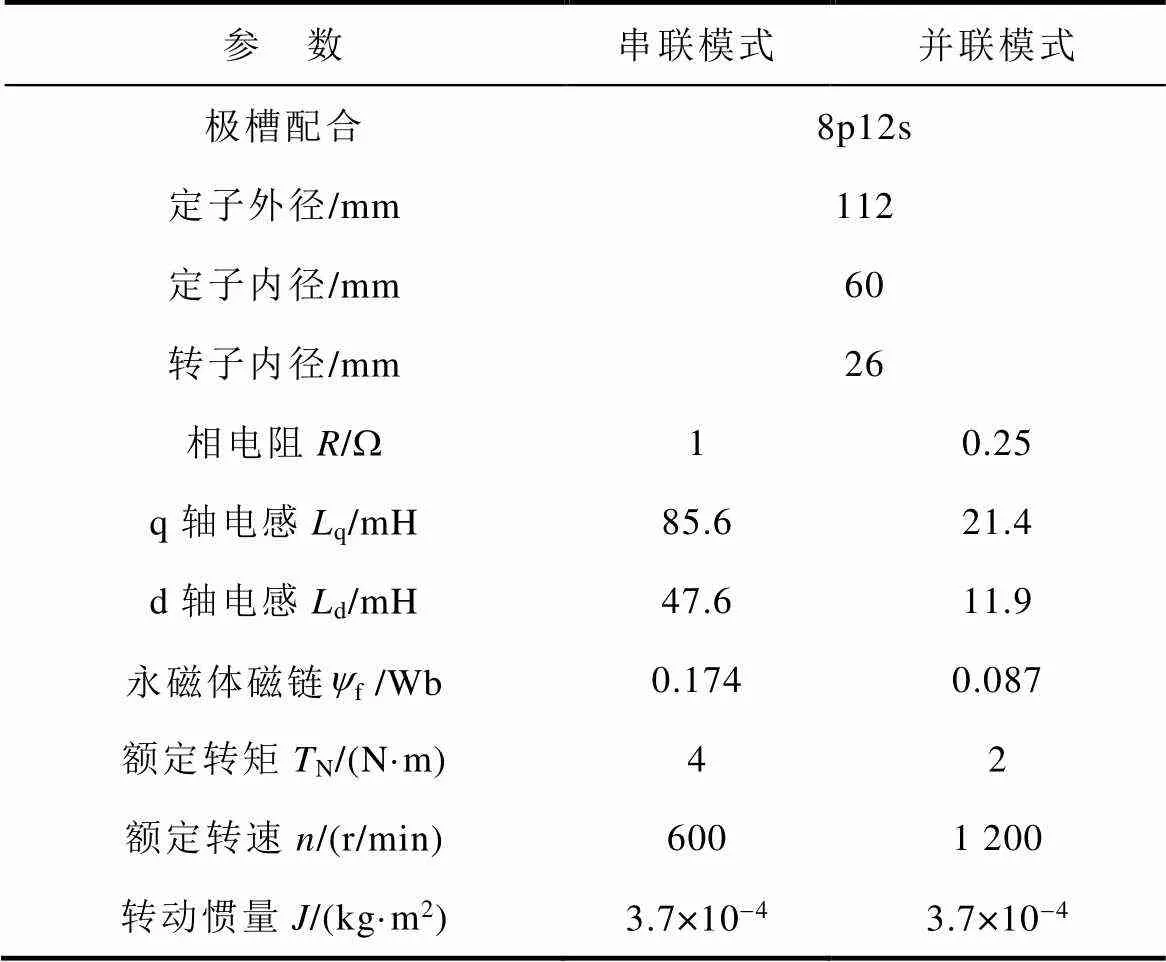
表2 原理型樣機主要參數(shù)
為了驗證本文所提控制策略的可行性和有效性,分別給出了采用傳統(tǒng)PI控制和本文所提滑模變結(jié)構(gòu)控制時系統(tǒng)的實驗結(jié)果。實驗中,為了反映電機全工況的運行情況,分別選取繞組串聯(lián)工況(600r/min@4N·m)、繞組切換工況(1 000r/min@ 2N·m)以及繞組并聯(lián)工況(1 200r/min@2N·m)三個典型工況進行實驗研究。
4.1 串聯(lián)或并聯(lián)模式下的實驗結(jié)果
圖10為繞組串聯(lián)模式、轉(zhuǎn)速600r/min工況下,突加負載轉(zhuǎn)矩0→4N·m或突減負載轉(zhuǎn)矩4→0N·m時的轉(zhuǎn)速響應(yīng)曲線。
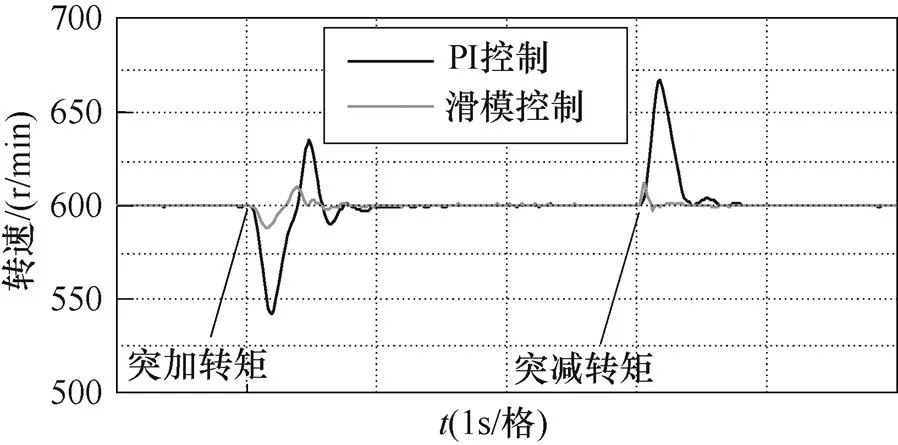
圖10 串聯(lián)模式下突變額定負載的轉(zhuǎn)速響應(yīng)
圖11為繞組并聯(lián)模式、轉(zhuǎn)速1 200r/min工況下,突加負載轉(zhuǎn)矩0→2N·m或突減負載轉(zhuǎn)矩2→0N·m時的轉(zhuǎn)速響應(yīng)曲線。
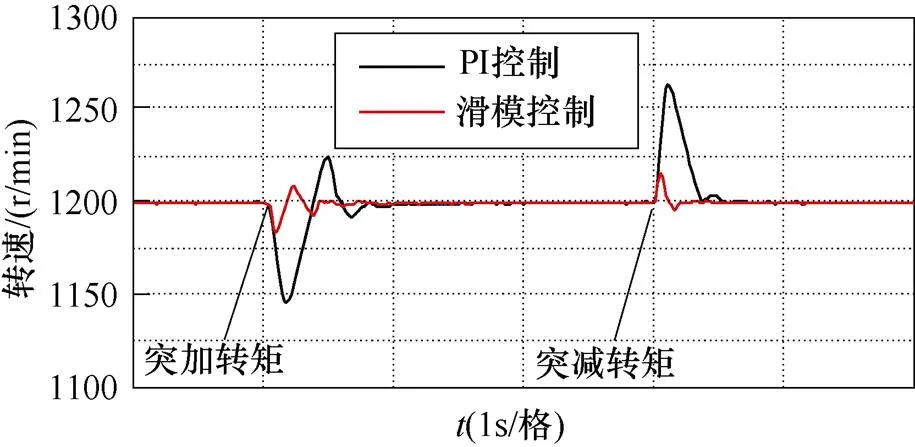
圖11 并聯(lián)模式下突變額定負載的轉(zhuǎn)速響應(yīng)
從圖10、圖11可得:繞組在串聯(lián)或并聯(lián)模式下突加或突減負載時,采用PI控制時轉(zhuǎn)速波動最大為60r/min左右;而采用本文所提的滑模變結(jié)構(gòu)控制器時,轉(zhuǎn)速波動最大為10r/min左右,能夠顯著抑制轉(zhuǎn)矩突變時的轉(zhuǎn)速波動;并且能有效減少系統(tǒng)的動態(tài)響應(yīng)時間。
4.2 繞組重構(gòu)過程的實驗結(jié)果
實驗時,繞組重構(gòu)工況點的轉(zhuǎn)速為1 000r/min、負載轉(zhuǎn)矩為額定轉(zhuǎn)矩2N·m。圖12、圖13分別為繞組不同模式重構(gòu)時的電流響應(yīng)結(jié)果。
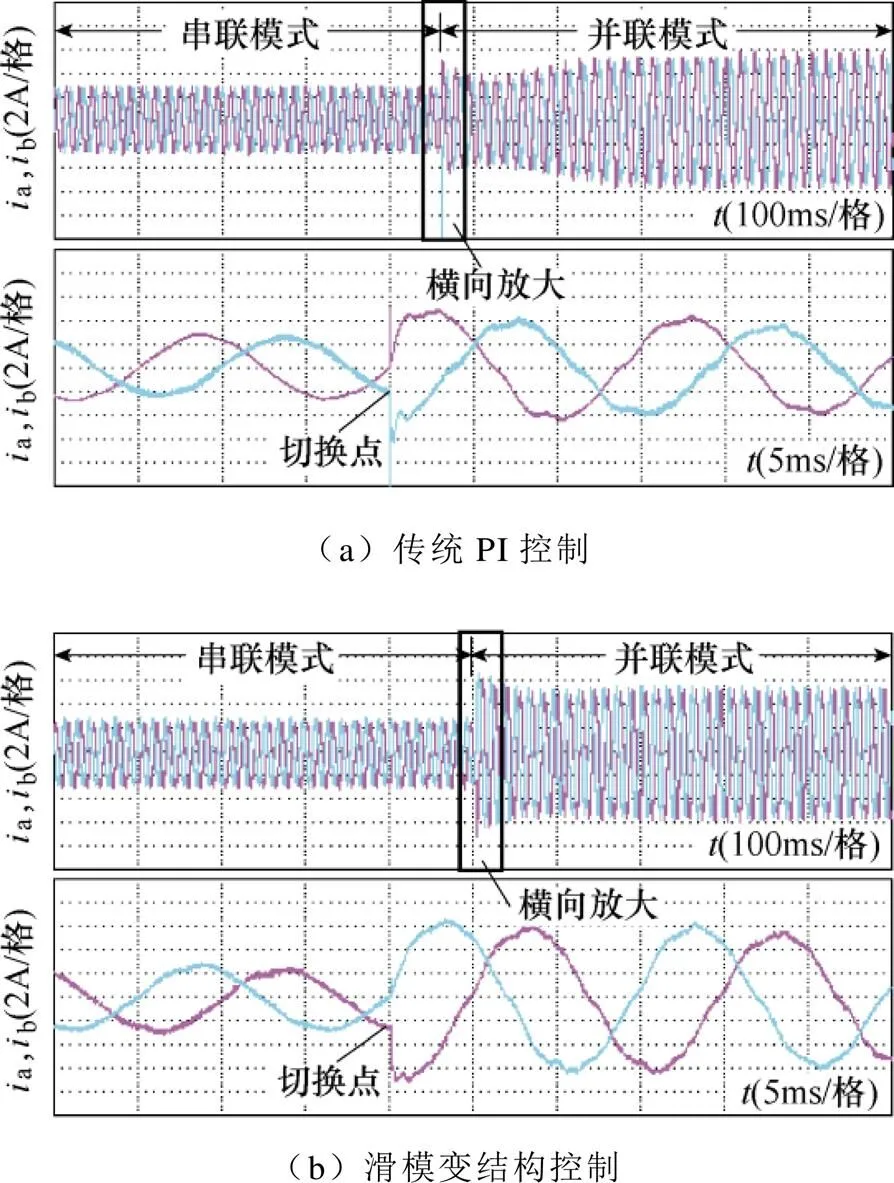
圖12 繞組由串聯(lián)至并聯(lián)重構(gòu)過程的電流波形
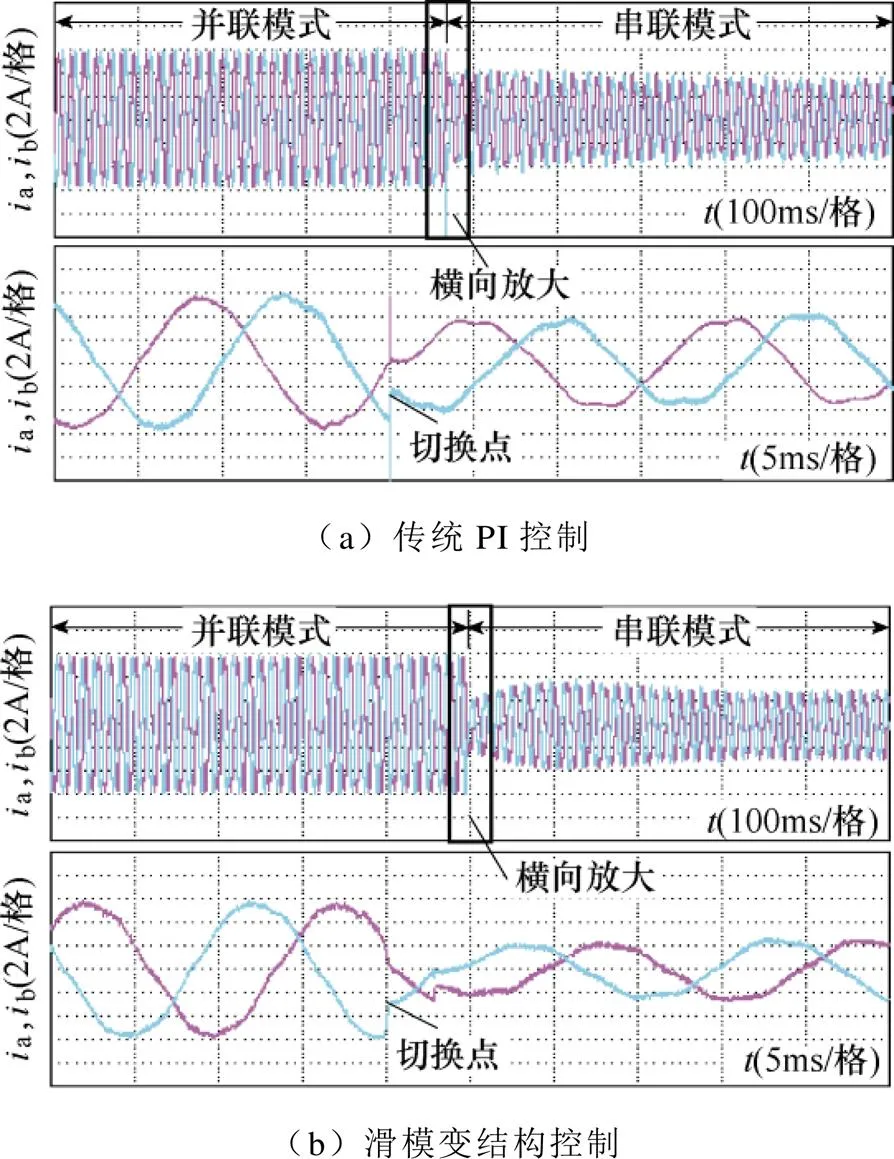
圖13 繞組由并聯(lián)至串聯(lián)重構(gòu)過程的電流波形
從圖12、圖13可得:采用傳統(tǒng)PI控制時電流存在突變尖峰;而采用本文所提出的滑模變結(jié)構(gòu)控制方式能夠有效抑制重構(gòu)瞬間的電流突變。
圖14為繞組重構(gòu)過程的轉(zhuǎn)速響應(yīng)曲線。從圖14可得:采用本文所提的復(fù)合滑模控制器能顯著抑制繞組重構(gòu)過程的轉(zhuǎn)速波動;并且能顯著減少系統(tǒng)的動態(tài)響應(yīng)時間。
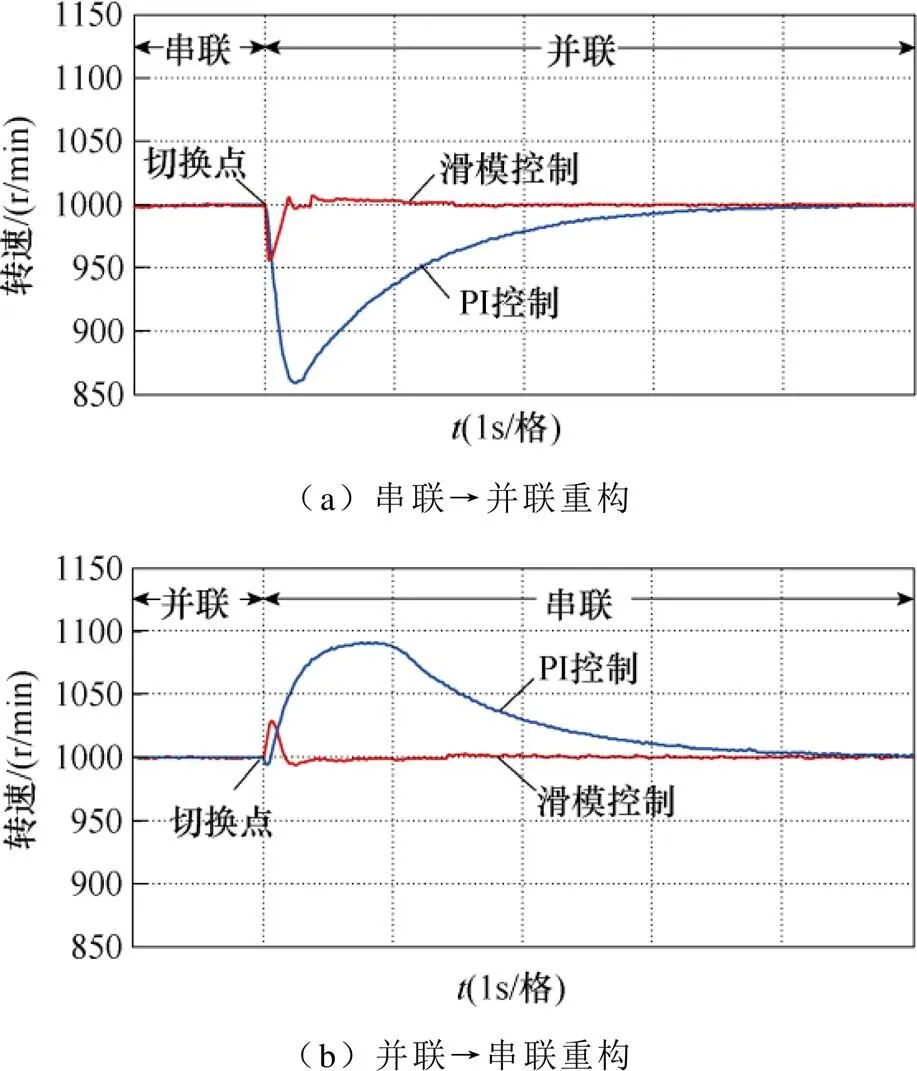
圖14 繞組重構(gòu)過程的轉(zhuǎn)速響應(yīng)
5 結(jié)論
本文所提出的雙繞組永磁同步電機滑模變結(jié)構(gòu)控制有效解決了該類電機參數(shù)變化和繞組重構(gòu)存在的問題,實現(xiàn)了該類電機全工況的高品質(zhì)運行。
1)復(fù)合滑模變結(jié)構(gòu)控制器對該類電機參數(shù)變化具有強魯棒性的同時,能夠迅速滿足繞組重構(gòu)瞬間電流變化的要求,實現(xiàn)了該類電機典型工況下的參數(shù)自適應(yīng),提升了系統(tǒng)的動態(tài)控制性能。
2)小型樣機實驗從原理上驗證了所提控制策略在該類電機系統(tǒng)中的可行性;為后續(xù)根據(jù)車輛實際需求設(shè)計實用化的寬高效區(qū)、寬速域雙繞組永磁同步電機系統(tǒng)提供了技術(shù)儲備。
[1] 王雅玲, 徐衍亮. 基于電動汽車驅(qū)動的雙定子永磁無刷直流電機繞組換接運行分析[J]. 電工技術(shù)學(xué)報, 2014, 29(1): 98-103.
Wang Yaling, Xu Yanliang. Winding switching analysis of dual-stator permanent magnet brushless DC motors used in electric vehicles[J]. Transactions of China Electrotechnical Society, 2014, 29(1): 98- 103.
[2] Im S H, Gu B G. A snubberless solid-state tap changer for permanent magnet synchronous motors[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12143-12152.
[3] Huang Hong, Chang Liuchen. Electrical two-speed propulsion by motor winding switching and its control strategies for electric vehicles[J]. IEEE Transactions on Vehicular Technology, 1999, 48(2): 607-618.
[4] Hsieh M F, Hsu F S, Dorrell D G. Winding change- over permanent-magnet generators for renewable energy applications[J]. IEEE Transactions on Magnetics, 2012, 48(11): 4168-4171.
[5] 李垣江, 董鑫, 魏海峰, 等. 表貼式永磁同步電機轉(zhuǎn)速環(huán)復(fù)合PI無位置傳感器控制[J]. 電工技術(shù)學(xué)報, 2020, 35(10): 2119-2129.
Li Yuanjiang, Dong Xin, Wei Haifeng, et al. Sensor- less compound PI control for surface permanent magnet synchronous motor speed regulation system[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2119-2129.
[6] Liu Yang, Xiahou Kaishun, Wang Lei, et al. Switching control of GSC of DFIGWTs for disturbance rejection based on Bang–Bang control[J]. IEEE Transactions on Power Delivery, 2018, 33(6): 3256-3259.
[7] Chaoui H, Khayamy M, Aljarboua A A. Adaptive interval type-2 fuzzy logic control for PMSM drives with a modified reference frame[J]. IEEE Transa- ctions on Industrial Electronics, 2017, 64(5): 3786- 3797.
[8] 趙希梅, 金鴻雁. 基于Elman神經(jīng)網(wǎng)絡(luò)的永磁直線同步電機互補滑模控制[J]. 電工技術(shù)學(xué)報, 2018, 33(5): 973-979.
Zhao Ximei, Jin Hongyan. Complementary sliding mode control for permanent magnet linear synchronous motor based on Elman neural network[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(5): 973-979.
[9] 陳卓易, 屈穩(wěn)太. 基于PID型代價函數(shù)的永磁同步電機模型預(yù)測電流控制[J]. 電工技術(shù)學(xué)報, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971- 2978.
[10] Niu Shuangxia, Luo Yixiao, Fu Weinong, et al. Robust model predictive control for a three-phase PMSM motor with improved control precision[J]. IEEE Transactions on Industrial Electronics, 2021, 68(1): 838-849.
[11] 王勃, 王天擎, 于泳, 等. 感應(yīng)電機電流環(huán)非線性積分滑模控制策略[J]. 電工技術(shù)學(xué)報, 2021, 36(10): 2039-2048.
Wang Bo, Wang Tianqing, Yu Yong, et al. Nonlinear integral sliding mode control strategy for current loop of induction motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2039-2048.
[12] Qu Lizhi, Qiao Wei, Qu Liyan. Active-disturbance- rejection-based sliding-mode current control for permanent-magnet synchronous motors[J]. IEEE Transactions on Power Electronics, 2021, 36(1): 751-760.
[13] Yeam T I, Lee D C. Design of sliding-mode speed controller with active damping control for single- inverter dual-PMSM drive systems[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(5): 5794- 5801.
[14] Lian Chuanqiang, Xiao Fei, Gao Shan, et al. Load torque and moment of inertia identification for permanent magnet synchronous motor drives based on sliding mode observer[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5675-5683.
[15] Lu Wenqi, Zhang Zhenyi, Wang Dong, et al. A new load torque identification sliding mode observer for permanent magnet synchronous machine drive system[J]. IEEE Transactions on Power Electronics, 2019, 34(8): 7852-7862.
[16] Zhang Xiaoguang, Sun Lizhi, Zhao Ke, et al. Non- linear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J]. IEEE Transactions on Power Electro- nics, 2013, 28(3): 1358-1365.
[17] Wang Yaoqiang, Feng Yutao, Zhang Xiaoguang, et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4117-4126.
[18] 熊林云, 王杰. 永磁同步電機電能質(zhì)量分數(shù)階滑模控制[J]. 中國電機工程學(xué)報, 2019, 39(10): 3065- 3074.
Xiong Linyun, Wang Jie. Fractional order sliding mode control of PMSG wind turbine for power quality enhancement[J]. Proceedings of the CSEE, 2019, 39(10): 3065-3074.
[19] Fulton D A. Switch module for an electric machine having switchable stator windings: US8415910[P]. 2013-04-09.
[20] Tang Lixin, Burress T, Pries J. A reconfigurable- winding system for electric vehicle drive appli- cations[C]//2017 IEEE Transportation Electrification Conference and Expo, Chicago, IL, USA, 2017: 656- 661.
[21] Nipp E. Permanent magnet motor drives with switched stator windings[D]. Stockholm: Royal Institute of Technology, 1999.
Sliding Mode Variable Structure Control of a Dual-Winding Permanent Magnet Synchronous Motor
(School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China)
Dual-winding permanent magnet synchronous motor (PMSM) can improve the operating range by reconfiguring the windings of the series and parallel modes. However, the motor parameters variation in different winding modes could cause the traditional PI controller to be unable to satisfy the high-quality operation requirements. According to the operating characteristics of this type of motor, this paper studies a composite sliding mode variable structure controller that integrates speed loop control and anti-disturbance observation, which could effectively suppress the dynamic fluctuation of speed caused by motor parameter variation and winding reconstruction. Firstly, the working mechanism of the dual-winding PMSM in different modes and the reasons for the speed fluctuation during winding reconstruction are analyzed. Secondly, a sliding mode variable structure controller is designed to realize the self-adaptation of control parameters and quickly meet the reconstruction of the instantaneous current relationship to suppress dynamic fluctuations. Finally, a comparative experiment is carried out under typical working conditions for the scheme using PI controller and the sliding mode variable structure controller through a miniature principle prototype, which verifies the effectiveness and feasibility of the proposed control strategies.
Permanent magnet synchronous motor (PMSM), dual-winding construction, winding reconstruction, sliding mode variable structure control
TM351
10.19595/j.cnki.1000-6753.tces.211513
國家自然科學(xué)基金資助項目(51307032, 52277040)。
2021-09-27
2022-03-08
于艷君 男,1979年生,博士,教授,研究方向為特種電機控制。
E-mail: yuyanjun@hit.edu.cn
柴 鳳 女,1973年生,博士,教授,研究方向為特種電機系統(tǒng)。
E-mail: chaifeng@hit.edu.cn(通信作者)
(編輯 郭麗軍)
