超聲速飛機(jī)層流布局設(shè)計(jì)與評(píng)估技術(shù)進(jìn)展
2022-12-06 09:35:54袁吉森孫爵李玲玉于晟浩聶晗高亮杰韓忠華錢戰(zhàn)森
航空學(xué)報(bào) 2022年11期
關(guān)鍵詞:設(shè)計(jì)
袁吉森,孫爵,李玲玉,于晟浩,聶晗,高亮杰,韓忠華,錢戰(zhàn)森
1. 航空工業(yè)空氣動(dòng)力研究院 高速高雷諾數(shù)氣動(dòng)力航空科技重點(diǎn)實(shí)驗(yàn)室,沈陽 110034
2. 航空工業(yè)空氣動(dòng)力研究院 高超聲速氣動(dòng)力/熱技術(shù)重點(diǎn)實(shí)驗(yàn)室,沈陽 110034
3. 西北工業(yè)大學(xué) 航空學(xué)院 翼型/葉柵空氣動(dòng)力學(xué)重點(diǎn)實(shí)驗(yàn)室,西安 710072
4. 西北工業(yè)大學(xué) 航空學(xué)院 超聲速客機(jī)研究中心,西安 710072
民用飛機(jī)自誕生以來,就以其快捷、舒適的特點(diǎn)成為人類出行的重要交通工具。但隨著全球經(jīng)濟(jì)的發(fā)展以及國家之間交往的日益頻繁,傳統(tǒng)亞聲速飛機(jī)已經(jīng)難以滿足人們對(duì)旅行速度的要求,發(fā)展飛行速度更快的超聲速民機(jī)成為民航運(yùn)輸?shù)钠惹行枨蟆T缭?0世紀(jì)70年代,以“協(xié)和”號(hào)、“圖144”為代表的第一代超聲速民機(jī)就已經(jīng)研制成功,但這兩種飛機(jī)油耗高、航程短、使用成本昂貴、聲爆問題嚴(yán)重、安全性差,最終不得不退出了民航市場(chǎng)。此后世界多國提出了第二代超聲速民機(jī)研究計(jì)劃,諸如HSCT計(jì)劃[1]、ESRP[2]計(jì)劃等,但這些計(jì)劃都并未付諸實(shí)踐。近年來,新一代超聲速民機(jī)因具有獨(dú)特的旅行效率優(yōu)勢(shì)再次得到了國際航空界的普遍關(guān)注。世界各國紛紛掀起了新一代超聲速民機(jī)的研究熱潮,并制定了一系列研究計(jì)劃,包括QSP計(jì)劃[3]、“N+3”計(jì)劃[4]、NEXST計(jì)劃[5]等。
新一代超聲速民機(jī)研制的重點(diǎn)在于解決聲爆和經(jīng)濟(jì)性問題,因此需要突破的關(guān)鍵技術(shù)難題主要有:聲爆預(yù)測(cè)及其抑制技術(shù)、超聲速減阻技術(shù)、超聲速變循環(huán)發(fā)動(dòng)機(jī)技術(shù)、低聲爆低阻布局與綜合優(yōu)化技術(shù)[6]。對(duì)于民用飛機(jī),經(jīng)濟(jì)性是決定其能否成功投入商業(yè)運(yùn)營的重要因素。相比于亞聲速,超聲速飛機(jī)因其升阻比大大降低,導(dǎo)致氣動(dòng)效率下降較為明顯,如想成功在現(xiàn)代航空運(yùn)輸中得到廣泛應(yīng)用,巡航條件的減阻問題成為關(guān)鍵技術(shù)。與湍流流動(dòng)相比,層流流動(dòng)的摩擦阻力明顯減小,如能在超聲速飛機(jī)的表面保持更多的層流區(qū),其巡航氣動(dòng)效率將大幅提升。
由于層流對(duì)于減阻的巨大潛力,航空界很早就開始了飛機(jī)層流流動(dòng)技術(shù)的研究,形成了自然層流(NLF)、層流控制(LFC)和混合層流控制(HLFC)3種增強(qiáng)層流的技術(shù)手段[7-8],發(fā)展了數(shù)值模擬、風(fēng)洞試驗(yàn)、飛行試驗(yàn)3種層流評(píng)估技術(shù)。亞/跨聲速運(yùn)輸機(jī)布局的層流化的可行性已經(jīng)在很多風(fēng)洞試驗(yàn)和飛行試驗(yàn)得到了驗(yàn)證[9-11]。但對(duì)于超聲速飛機(jī),由于大后掠導(dǎo)致的強(qiáng)三維效應(yīng)和高速的強(qiáng)可壓縮性同時(shí)存在,層流設(shè)計(jì)相比于亞聲速則具有更大的難度。而且高速邊界層對(duì)表面缺陷、粗糙度、自由流湍流度和環(huán)境擾動(dòng)十分敏感,在以層流增強(qiáng)為目標(biāo)的設(shè)計(jì)優(yōu)化任務(wù)中,必須準(zhǔn)確地考慮這些可能因素。針對(duì)這一難題,國內(nèi)外開展了超聲速自然層流設(shè)計(jì)、流動(dòng)控制和層流效果評(píng)估等方面的多項(xiàng)研究,并取得了諸多進(jìn)展。
本文首先介紹了層流設(shè)計(jì)對(duì)超聲速飛機(jī)氣動(dòng)效率提升的顯著效益,然后闡述了超聲速自然層流設(shè)計(jì)技術(shù)和流動(dòng)控制兩種有效的轉(zhuǎn)捩延遲手段,接著簡(jiǎn)述了數(shù)值模擬、風(fēng)洞試驗(yàn)、飛行試驗(yàn)3種層流評(píng)估技術(shù),介紹了國內(nèi)外典型的超聲速層流布局設(shè)計(jì)與評(píng)估案例,最后總結(jié)了技術(shù)難點(diǎn)并給出了發(fā)展建議。
1 超聲速飛機(jī)的氣動(dòng)效率
超聲速飛機(jī)的巡航升阻比通常不足8.0,而亞聲速運(yùn)輸機(jī)的巡航升阻比接近20.0,更小的升阻比意味著更多的燃料消耗和更高的飛行成本。如果在維持升力的條件下能夠減少超聲速飛機(jī)的總阻力,就可以提高升阻比,改善其經(jīng)濟(jì)性。
超聲速飛機(jī)的主要阻力來源有:激波阻力、摩擦阻力、升致阻力、干擾阻力等。在超聲速巡航(以馬赫數(shù)2.0為例)條件下,激波阻力約占總阻力的20%,摩擦阻力約占40%,升致阻力約占35%,其他阻力約占5%[12]。因此超聲速減阻的重點(diǎn)在于降低激波阻力和摩擦阻力。歷史上對(duì)激波阻力的研究較為充分,建立了以機(jī)身面積律和后掠機(jī)翼為代表的典型布局形式。摩擦阻力在總阻力中占有很大的比重,因而通過層流設(shè)計(jì)技術(shù)來減小摩擦阻力對(duì)于超聲速飛機(jī)氣動(dòng)效率的提升具有很大的工程意義。
洛克希德·馬丁公司的Morgenstern等[4]給出了層流設(shè)計(jì)對(duì)N+3代超聲速民機(jī)阻力系數(shù)和升阻比的影響,如圖1所示。兩者都是在馬赫數(shù)1.6和5×104ft(1 ft=0.304 8 m)高度的巡航條件下進(jìn)行評(píng)估的。隨著層流范圍的擴(kuò)大,升阻比得到了明顯地提高。如能保持40%弦長的層流范圍就足以使升阻比提高約2.0;如能保持80%弦長的層流范圍甚至可以使升阻比提高將近6.0。從圖2可以看出,隨著層流范圍的擴(kuò)大,燃油效率(紅色線,定義為每磅燃油的乘客英里數(shù))顯著增加,最大起飛總重(深藍(lán)色線)和燃油重量(淺藍(lán)色線)顯著減少。
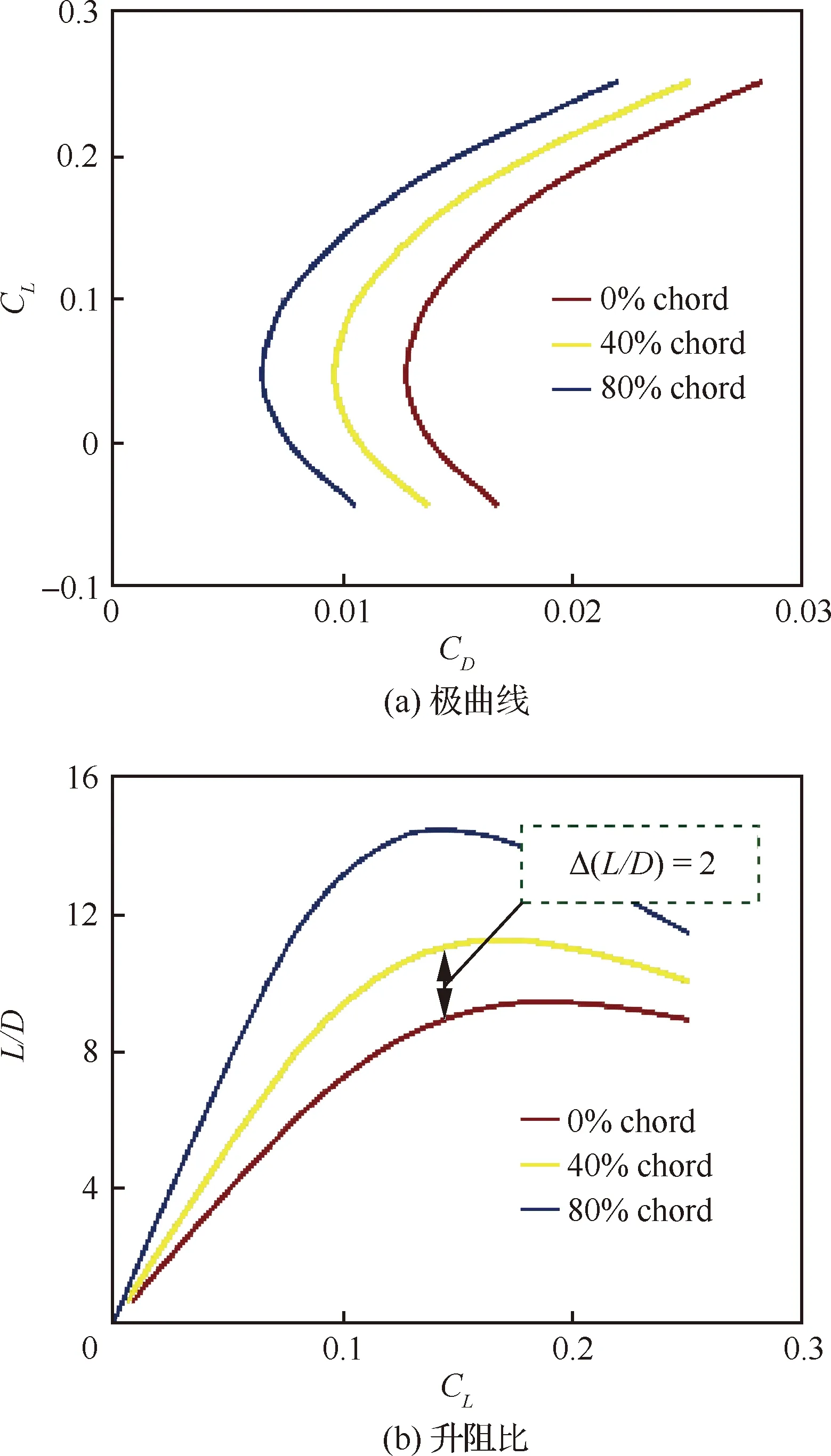
圖1 3種自然層流水平下的巡航阻力極曲線[4]
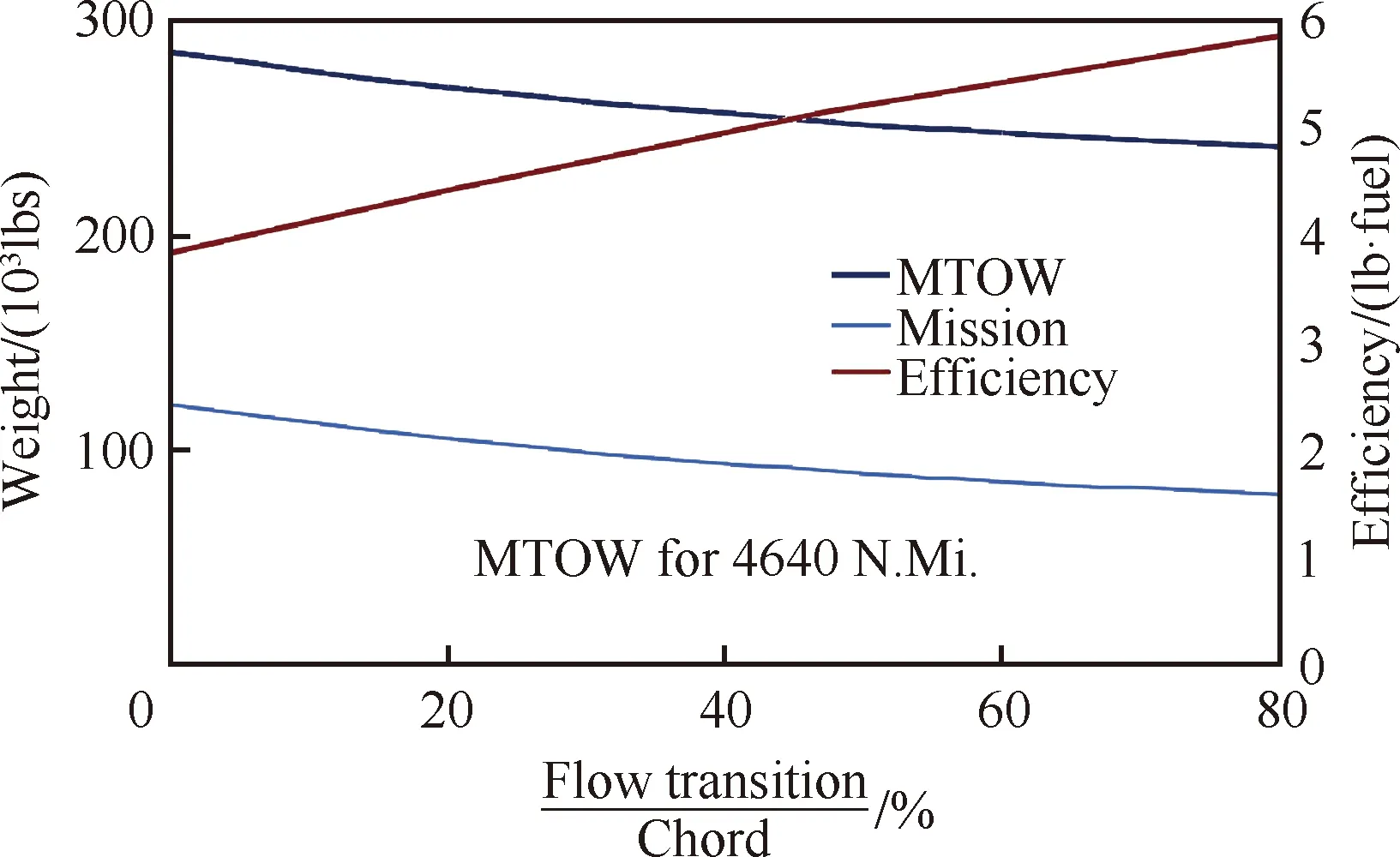
圖2 自然層流帶來的重量和燃油節(jié)省-恒定范圍[4]
斯坦福大學(xué)的Sturdza[13]對(duì)巡航馬赫數(shù)為1.5 的大型超聲速公務(wù)機(jī)進(jìn)行了層流效益評(píng)估,如圖3所示。根據(jù)計(jì)算結(jié)果,將機(jī)翼層流范圍從5%增加到80%,航程增加了近2 000 n mile(1 n mile=1 852 m),可以將一架僅能跨大西洋的飛機(jī)變?yōu)榭煽缭教窖蟮娘w機(jī)。圖4是考慮5 000 n mile 固定航程的重量節(jié)省圖[13]。從圖中可以看出,將機(jī)翼層流范圍從10%增加到80%,航程空重和起飛重量均可下降一半多。
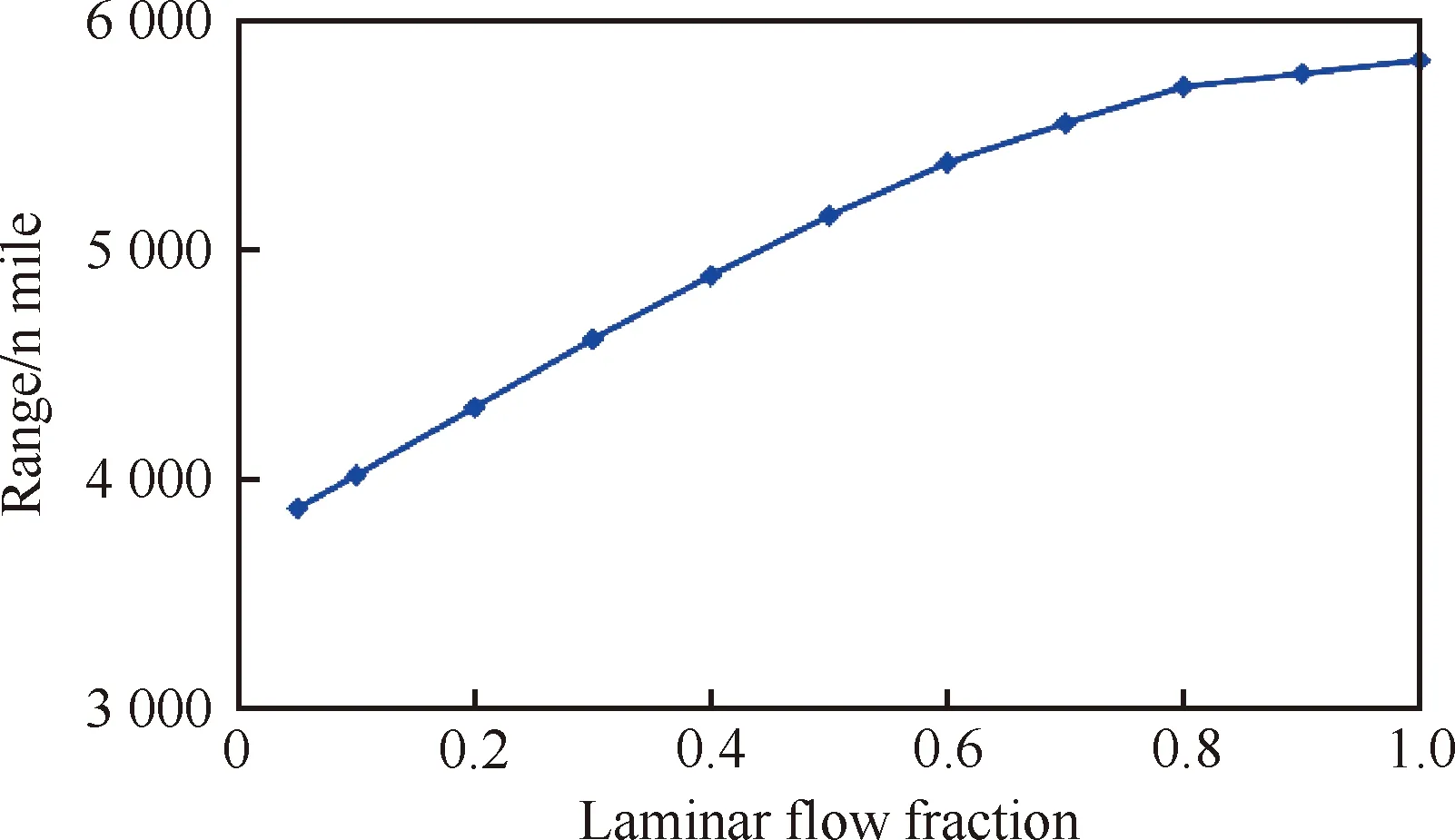
圖3 層流對(duì)航程的影響[13]
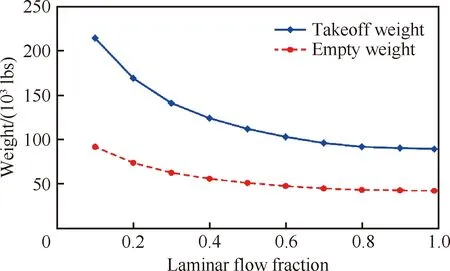
圖4 層流對(duì)重量的影響[13]
綜合來看,在保持升力和力矩特性相當(dāng)?shù)臈l件下,在超聲速飛機(jī)表面維持更多的層流范圍是提高其氣動(dòng)效率的重要途徑,本文將針對(duì)超聲速自然層流、流動(dòng)控制和設(shè)計(jì)效果評(píng)估技術(shù)展開回顧。
2 超聲速層流布局設(shè)計(jì)技術(shù)
2.1 超聲速機(jī)翼的邊界層轉(zhuǎn)捩機(jī)制
對(duì)于超聲速飛機(jī),為了獲得較低波阻的氣動(dòng)構(gòu)型,采用后掠翼成為氣動(dòng)界的共識(shí),經(jīng)過多年的積累,大后掠翼布局已是超聲速飛機(jī)的基本構(gòu)型[14-15],故而當(dāng)前的超聲速層流布局設(shè)計(jì)主要針對(duì)該類布局來開展。對(duì)于超聲速飛機(jī)的大后掠機(jī)翼,流動(dòng)從層流向湍流轉(zhuǎn)變的不穩(wěn)定機(jī)制主要可歸結(jié)為4類,如圖5所示。
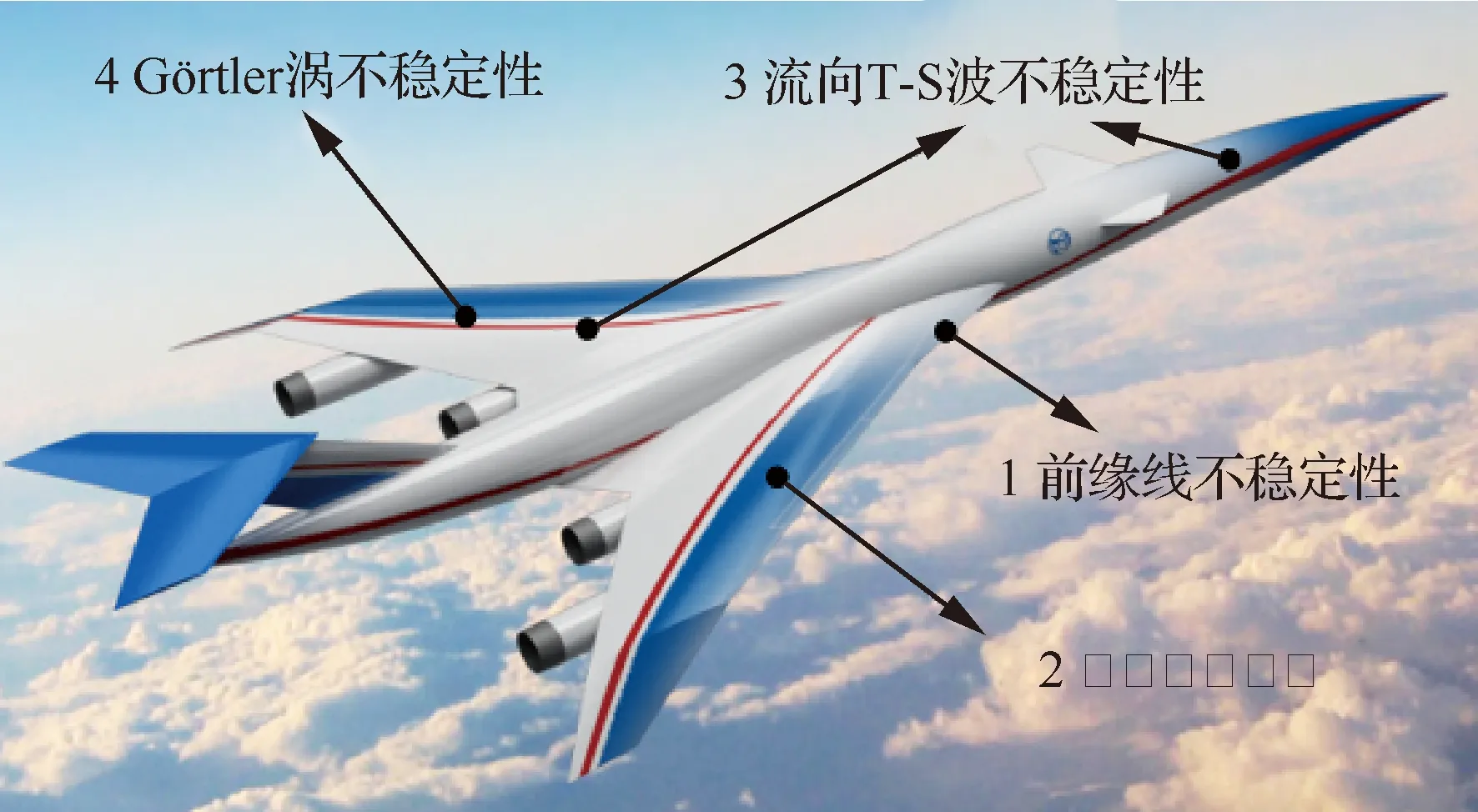
圖5 超聲速大后掠翼的4類不穩(wěn)定機(jī)制
1) 前緣線不穩(wěn)定性
前緣線[16-18],也叫駐點(diǎn)線,指的是機(jī)翼上靜壓最大的翼展方向線,它一般在靠近機(jī)翼前緣的位置,將氣流分為上表面的一個(gè)分支和下表面的一個(gè)分支。對(duì)于后掠翼來講,其前緣線也是一條空間后掠流線,如圖6所示[19]。
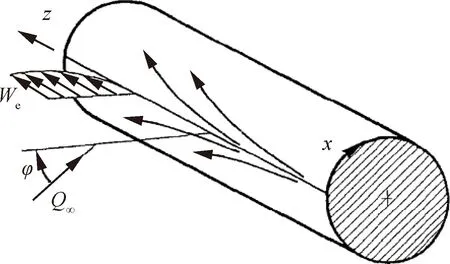
圖6 前緣線示意圖[19]
前緣線不穩(wěn)定性(Attachment-line Instability)可分為兩類:一是流動(dòng)“自然”轉(zhuǎn)捩。在前緣無污染的情況下,擾動(dòng)亦可自激發(fā)展。如圖7(a)所示[19],層流邊界層在翼根附近的A點(diǎn)發(fā)展,然后可能在展向方向的下游變?yōu)橥牧鳌6乔熬壩廴疽鸬牧鲃?dòng)轉(zhuǎn)捩。靠近機(jī)身部位的翼根附近,機(jī)身的湍流邊界層往往會(huì)沿著前緣線展向發(fā)展,如圖7(b)所示[19]。由于其擾動(dòng)較大,從而極易誘發(fā)轉(zhuǎn)捩。
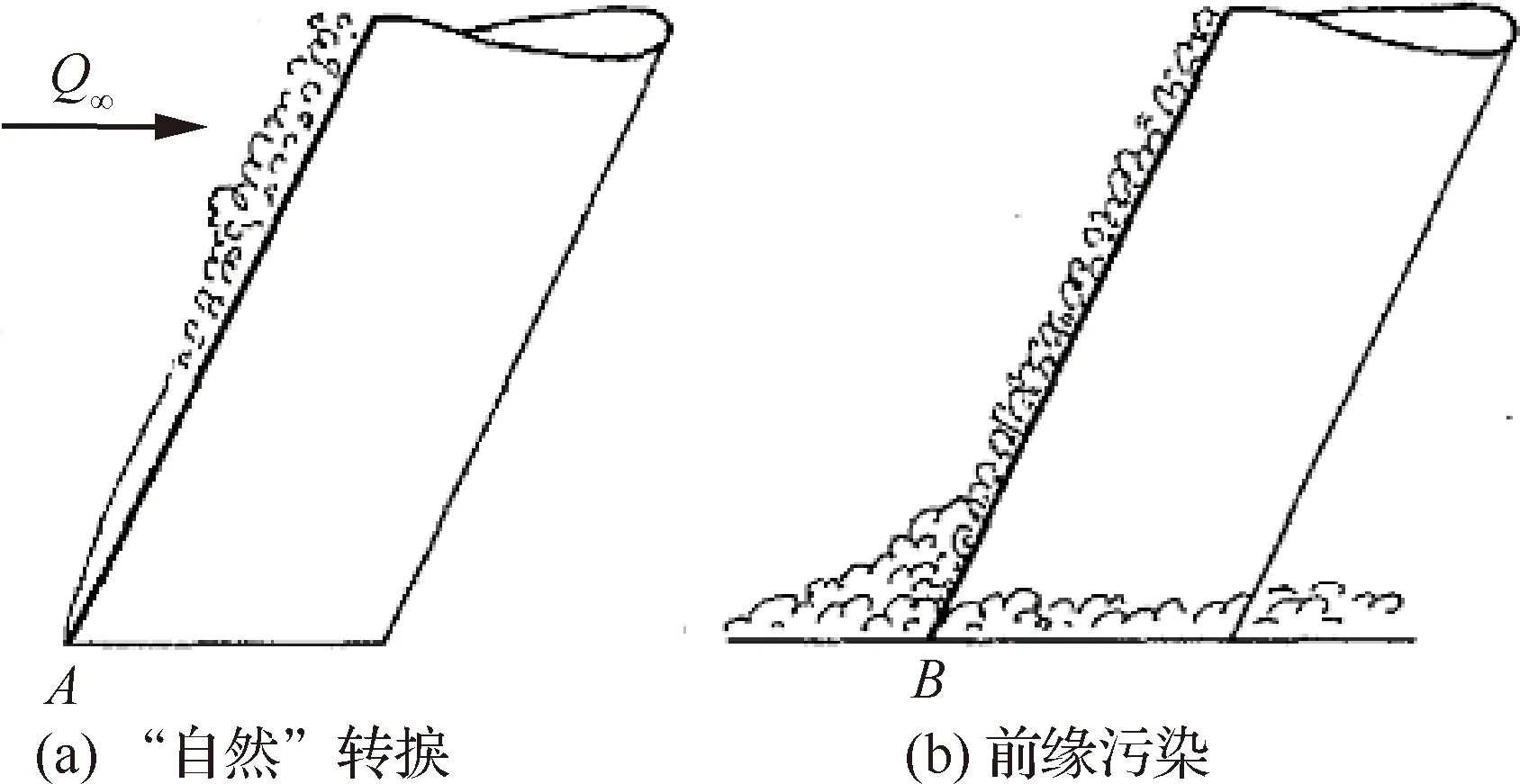
圖7 “自然”轉(zhuǎn)捩與前緣污染[19]
2) 橫流不穩(wěn)定性
后掠翼前緣附近存在著較強(qiáng)的展向壓力梯度,使平行于機(jī)翼表面的無黏流線發(fā)生偏離;而在邊界層內(nèi)部,盡管越靠近壁面流向速度越小,但壁面法向壓力梯度保持不變。因此,在邊界層內(nèi)部垂直于無黏流線的方向產(chǎn)生了二次流,稱為橫流[20-22]。圖8顯示了三維橫流邊界層速度剖面[22]。因?yàn)闄M流速度在壁面和邊界層外必須為0,所以橫流速度型必然存在拐點(diǎn)。拐點(diǎn)的存在提供了無黏不穩(wěn)定性的來源,并且不穩(wěn)定性表現(xiàn)為同向旋轉(zhuǎn)渦流,其軸線與局部無黏流線呈一定角度的夾角。
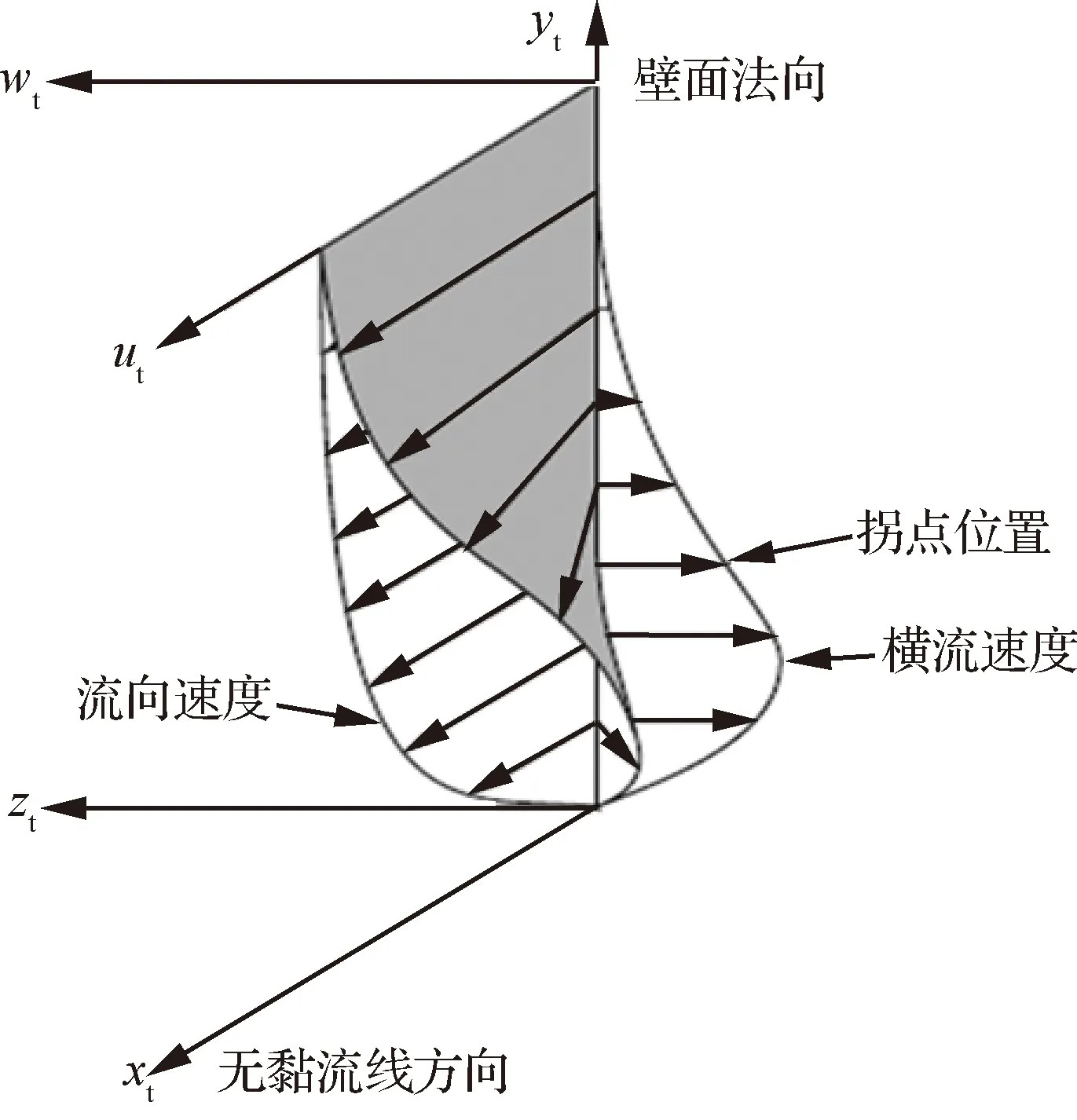
圖8 三維橫流邊界層速度剖面[22]
橫流不穩(wěn)定性(Crossflow Instability)存在兩種不穩(wěn)定波(簡(jiǎn)稱C-F波),一種是駐波(Stationary Crossflow Waves),一種是行波(Traveling Crossflow Waves)。前者屬于定常擾動(dòng),物理上主要體現(xiàn)為表面非光潔帶來的沿展向均勻分布的分離渦;后者屬于非定常擾動(dòng),物理上主要體現(xiàn)為隨流線向下游傳播的聲波擾動(dòng)。根據(jù)邊界層線性穩(wěn)定性理論,行波擾動(dòng)相比于駐波擾動(dòng)具有更大的增長率,因而橫流不穩(wěn)定性應(yīng)更多是由行波擾動(dòng)引起。但線性穩(wěn)定性理論分析是假設(shè)行波和駐波具有相同的初始擾動(dòng)幅值。在實(shí)際的飛行試驗(yàn)和風(fēng)洞試驗(yàn)中,哪種模態(tài)在邊界層轉(zhuǎn)捩中占主導(dǎo)地位取決于定常擾動(dòng)和非定常擾動(dòng)的相對(duì)幅值大小。對(duì)于飛行試驗(yàn),來流湍流度很低,但飛機(jī)表面粗糙度較大,駐波模態(tài)可能占主導(dǎo)地位[23-24]。而對(duì)于風(fēng)洞試驗(yàn),來流湍流度往往較大,表面粗糙度不確定度也較大,兩者都有可能[25]。
3) 流向T-S波不穩(wěn)定性
T-S波[26-28]是流向平均速度剖面不穩(wěn)定的結(jié)果,因其對(duì)應(yīng)于Orr-Sommerfeld方程的不穩(wěn)定特征值,也被稱為模態(tài)不穩(wěn)定性。通常亞、跨乃至超聲速條件下,主導(dǎo)的是第1模態(tài),在高超聲速時(shí)才會(huì)出現(xiàn)高階模態(tài)。T-S波不穩(wěn)定性(Tollmien-Schlichting Wave Instability)主要與流向壓力梯度相關(guān),在順壓區(qū)域趨于穩(wěn)定,逆壓區(qū)域更趨于不穩(wěn)定。
4) G?rtler渦不穩(wěn)定性
對(duì)于凹曲面,在離心力作用下會(huì)生成對(duì)轉(zhuǎn)的旋渦,稱之為G?rtler渦[29-30],如圖9所示[31]。G?rtler渦的發(fā)展也可能會(huì)導(dǎo)致轉(zhuǎn)捩發(fā)生,但對(duì)于超聲速機(jī)翼,前緣區(qū)域基本不存在凹曲面,故一般不涉及G?rtler渦不穩(wěn)定性(G?rtler Vortex Instability),只有機(jī)體的某些部位,如進(jìn)氣道壓縮面、機(jī)翼后緣才有可能發(fā)生,設(shè)計(jì)中可單獨(dú)予以考慮。
圖9 凹曲面G?rtler渦的示意圖[31]
2.2 超聲速機(jī)翼自然層流設(shè)計(jì)技術(shù)
要擴(kuò)大機(jī)翼表面的層流范圍,就要對(duì)以上4種不穩(wěn)定性進(jìn)行抑制。
1) 前緣線不穩(wěn)定性抑制技術(shù)
通常超聲速布局的基本構(gòu)型都是機(jī)身機(jī)翼組合體形式,因而前緣線不穩(wěn)定性必須考慮機(jī)身邊界層污染。前緣線附近流動(dòng)經(jīng)過適當(dāng)簡(jiǎn)化后,可歸結(jié)為典型的帶后掠Hiemenz流動(dòng)。所謂Hiemenz流動(dòng)指的是流動(dòng)流向正對(duì)著的物體,從而發(fā)生滯止的現(xiàn)象,最簡(jiǎn)化的形式為氣流撞擊平板流動(dòng),如圖10所示。如圖11的氣流撞擊水平圓柱流動(dòng),也是Hiemenz流動(dòng)的一種,本文研究的對(duì)象主要是如圖6所示后掠Hiemenz流動(dòng)。
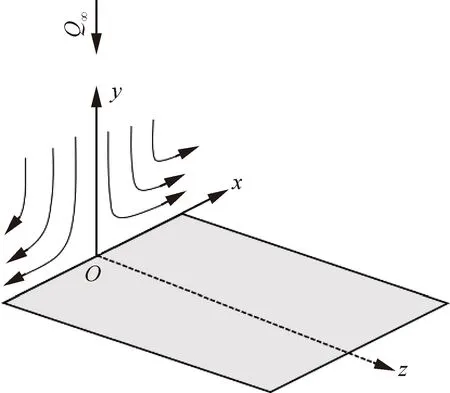
圖10 平板Hiemenz流動(dòng)示意圖
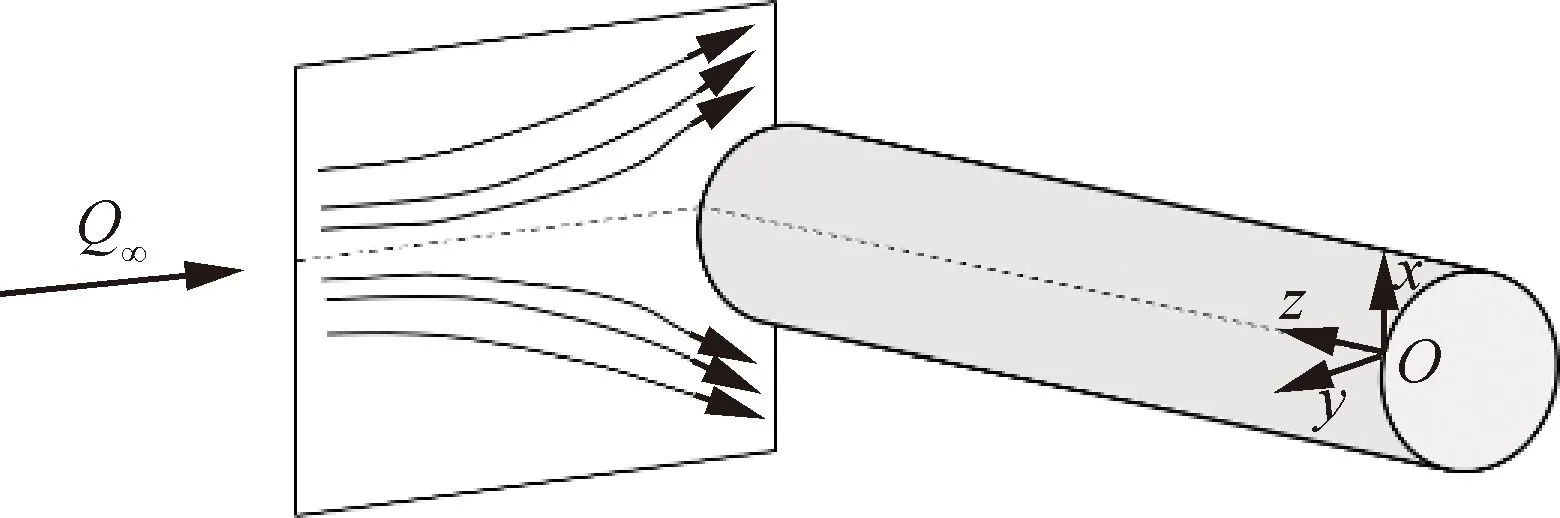
圖11 圓柱Hiemenz流動(dòng)示意圖
帶有機(jī)體邊界層污染的后掠Hiemenz流動(dòng),其失穩(wěn)機(jī)理還是比較復(fù)雜的,目前還未有精準(zhǔn)的預(yù)測(cè)方法。前期Hall[32]、Theofilis[33]、Heeg[34]、符松[35]等采用線性穩(wěn)定性分析方法開展了該類流動(dòng)的轉(zhuǎn)捩特性,為氣動(dòng)設(shè)計(jì)提供了一定的理論支撐。在實(shí)際設(shè)計(jì)中使用較多的是Pfenninger[36]和Poll[37-38]發(fā)展的方法,因其簡(jiǎn)潔便于引入布局設(shè)計(jì),得到了較為廣泛的應(yīng)用。下面對(duì)這兩種方法分別進(jìn)行介紹。
Pfenninger在X-21的飛行試驗(yàn)中發(fā)現(xiàn),后掠機(jī)翼前緣的展向湍流污染造成了機(jī)翼的層流損失,并且給出了污染發(fā)生的條件[36],即當(dāng)ReθAL<100時(shí),機(jī)翼可以始終保持層流;而當(dāng)ReθAL>100時(shí),在前緣污染作用下轉(zhuǎn)捩就可能發(fā)生。這里,ReθAL=VeθAL/ν,其中ReθAL為前緣線的動(dòng)量厚度雷諾數(shù),Ve為自由流的展向速度分量,θAL為前緣線的當(dāng)?shù)貏?dòng)量厚度,ν為運(yùn)動(dòng)黏度。對(duì)于后掠圓柱,該表達(dá)式可改寫為
(1)
式中:U∞為來流速度;R為前緣曲率半徑;φ為前緣后掠角。

(2)

(3)
式中:ν*是參考溫度下的運(yùn)動(dòng)黏度。
T*=Te+A(Tw+Te)+B(Taw-Te)
(4)
式中:Te是邊界層邊緣溫度;Tw是壁面溫度;Taw是絕熱壁(恢復(fù))溫度;A、B為經(jīng)驗(yàn)常數(shù),通常取A=0.1,B=0.6。
Pfenninger和Poll提出的準(zhǔn)則已經(jīng)被許多風(fēng)洞試驗(yàn)和飛行試驗(yàn)所驗(yàn)證[40]。根據(jù)這一準(zhǔn)則,只要將前緣線雷諾數(shù)抑制在臨界值以下,就可以有效防止前緣線轉(zhuǎn)捩。
2) 流向T-S波不穩(wěn)定性抑制技術(shù)
在研究T-S波不穩(wěn)定性的Orr-Sommerfeld方程中,速度型曲率項(xiàng)d2U/dy2的正負(fù)是確定流動(dòng)穩(wěn)定與否的重要標(biāo)志。壁面附近該項(xiàng)負(fù)值越大,邊界層流動(dòng)越穩(wěn)定。由壁面附近邊界層的動(dòng)量方程可找出該速度型曲率項(xiàng)正負(fù)的方法,即可得出控制層流穩(wěn)定的措施。動(dòng)量方程為

(5)
式中:V0為壁面法向吹氣速度(+為吹起,-為吸氣);μ為黏性系數(shù);T為溫度。由此可見,?p/?x<0(順壓梯度)、V0<0(壁面吸氣)、dμ/dT>0、?T/?y>0(壁面冷卻)等為抑制T-S波不穩(wěn)定性的可用措施[41]。
在自然層流設(shè)計(jì)中,主要考慮第1種措施,即順壓梯度控制。通過改變翼型的幾何形狀,使得機(jī)翼沿弦向的壓力分布保持順壓梯度,即可有效地抑制T-S波不穩(wěn)定性
3) 橫流不穩(wěn)定性抑制技術(shù)
隨著機(jī)翼后掠角的增大,橫流不穩(wěn)定性會(huì)逐漸增強(qiáng)。理論分析表明,當(dāng)機(jī)翼后掠角超過25°后,橫流不穩(wěn)定性將主導(dǎo)邊界層轉(zhuǎn)捩,而對(duì)于馬赫數(shù)2.0級(jí)的超聲速飛機(jī)而言,其機(jī)翼前緣后掠角通常達(dá)到65°。橫流不穩(wěn)定性是由橫流速度型引起的,減少此速度分量可減弱不穩(wěn)定性。對(duì)于給定的機(jī)翼前緣、后掠角和單位雷諾數(shù),減少橫流速度分量的唯一方法是減小弦向的壓力梯度,但這又會(huì)增加T-S波的不穩(wěn)定性,因此后掠機(jī)翼的自然層流設(shè)計(jì)面臨既要抑制橫流不穩(wěn)定性,又要抑制T-S波不穩(wěn)定性的壓力分布設(shè)計(jì)問題[41]。另一方面,大型民用客機(jī)的飛行雷諾數(shù)較高,在高雷諾數(shù)條件下,橫流不穩(wěn)定性的抑制更加困難。
流向不穩(wěn)定性和橫流不穩(wěn)定性受流向壓力梯度的影響相反,在逆壓區(qū)域,T-S波不穩(wěn)定;在順壓區(qū)域,C-F波不穩(wěn)定。由于機(jī)翼前部總是加速區(qū)(順壓區(qū)),加速區(qū)之后是減速區(qū)(逆壓區(qū)),因此橫流不穩(wěn)定性主要位于前部,而流向不穩(wěn)定性通常位于橫流不穩(wěn)定性的下游區(qū)域。對(duì)于后掠機(jī)翼,橫流無法完全消除,只能盡量減弱其擾動(dòng)幅值。如果能在前緣附近將C-F波抑制在臨界值以下,然后在其下游采用微小的順壓或近似零壓力梯度抑制T-S波,即可實(shí)現(xiàn)大范圍的層流。同時(shí)考慮流向和橫向不穩(wěn)定性,需使得機(jī)翼沿弦向壓力分布滿足上翼面前緣吸力峰快速提升,繼而沿弦向保持水平壓力分布,即出現(xiàn)“平臺(tái)區(qū)”。如圖12所示,機(jī)翼沿弦向“平臺(tái)區(qū)”占比越大,層流區(qū)就越大[42]。
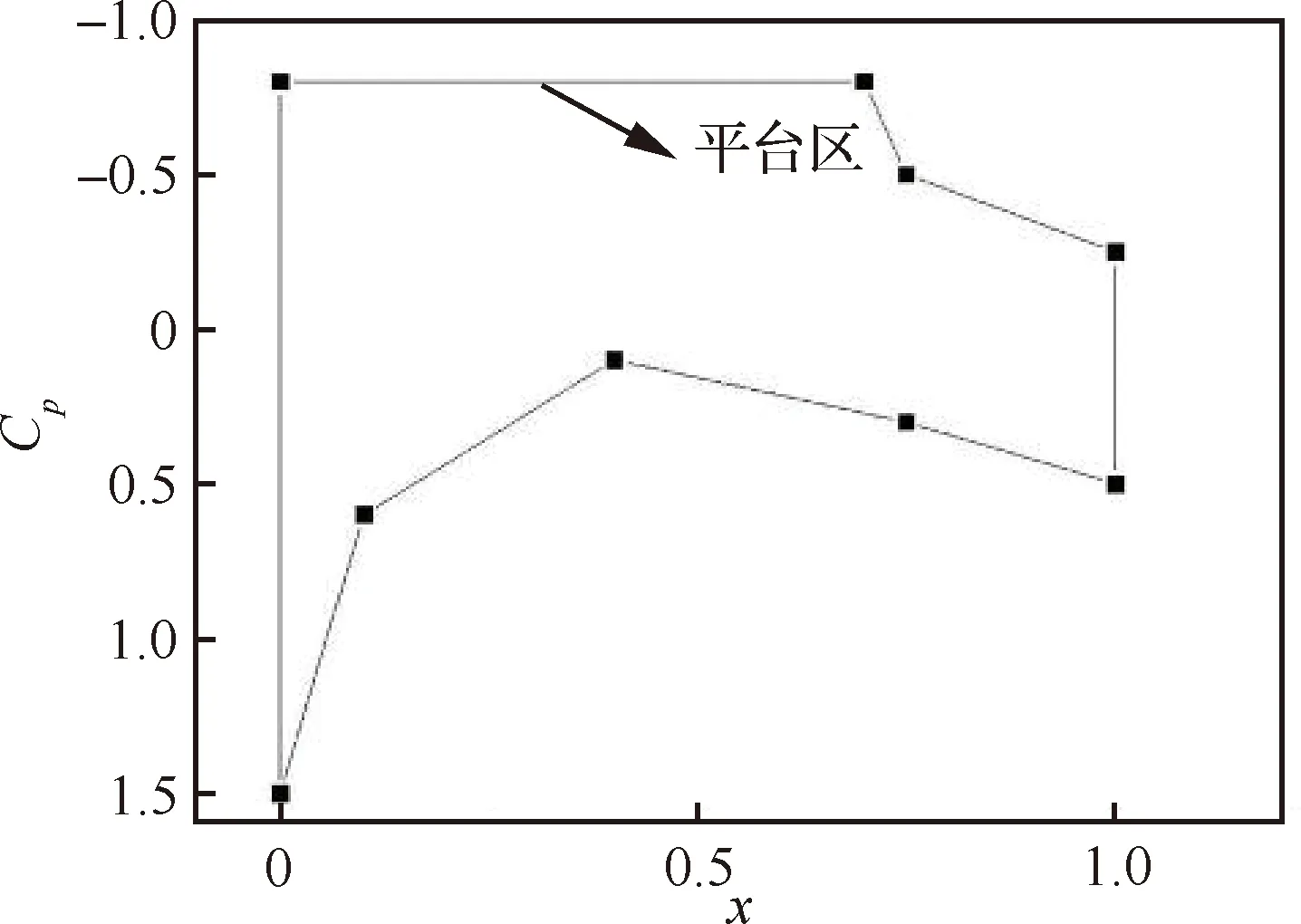
圖12 機(jī)翼理想壓力分布示意圖[42]
4) G?rtler渦不穩(wěn)定性抑制技術(shù)
G?rtler渦不穩(wěn)定性發(fā)生于外形的凹面區(qū)域,是由邊界層內(nèi)的擾動(dòng)在離心力的作用下發(fā)展成的G?rtler渦引起的不穩(wěn)定。凹面曲率大將助長此類不穩(wěn)定性的發(fā)展,因此可以通過相應(yīng)的外形設(shè)計(jì)即在表面進(jìn)行曲率約束來消除凹曲面,從而規(guī)避G?rtler渦的產(chǎn)生,對(duì)G?rtler渦不穩(wěn)定性進(jìn)行有效抑制[41-43]。
綜上所述,對(duì)超聲速機(jī)翼開展自然層流設(shè)計(jì)的要點(diǎn)在于:
1) 該幾何外形要控制前緣半徑,避免前緣線污染引發(fā)的轉(zhuǎn)捩,同時(shí)避免凹曲面設(shè)計(jì),規(guī)避G?rtler渦的產(chǎn)生。
2) 需要在滿足其他流動(dòng)約束(升力、俯仰力矩等)的條件下,對(duì)翼型幾何外形和對(duì)應(yīng)的壓力分布曲線進(jìn)行迭代優(yōu)化,使得壓力分布趨勢(shì)既能滿足對(duì)流向T-S波不穩(wěn)定性的有效抑制,又能滿足對(duì)橫向C-F波不穩(wěn)定性的有效抑制,從而得到滿足合適壓力分布的翼型幾何外形。
3) 要整體考慮超聲速飛機(jī)的自然層流設(shè)計(jì),還需充分考慮機(jī)身、發(fā)動(dòng)機(jī)等部件對(duì)機(jī)翼的綜合影響,同時(shí)考慮機(jī)翼的厚度、安裝角和扭轉(zhuǎn)角等因素。
2.3 超聲速層流保持技術(shù)
在自然層流設(shè)計(jì)的基礎(chǔ)上,采用流動(dòng)控制技術(shù)進(jìn)一步延緩流動(dòng)轉(zhuǎn)捩,也是研究較多的技術(shù),多年來人們提出了形形色色的控制方法。早期比較有代表性的是吹吸氣技術(shù),詳見Joslin[44]的綜述,但這些技術(shù)成熟度目前還不是很高,控制效果仍不是很理想,離實(shí)際工程使用均有著較大距離。近年來Malmuth等[45]提出的聲學(xué)超表面技術(shù)、Saric等[46]提出的分布式粗糙元技術(shù)和Corke[47]提出的等離子體控制技術(shù)得到了越來越多的關(guān)注,本節(jié)作重點(diǎn)介紹。
2.3.1 聲學(xué)超表面
1) 基本概念
聲學(xué)超表面是一個(gè)表面具有亞波長尺寸微結(jié)構(gòu)的層狀材料。聲學(xué)超表面技術(shù)延緩轉(zhuǎn)捩是通過設(shè)計(jì)表面微結(jié)構(gòu)的幾何尺寸和排布方式,來調(diào)控模態(tài)擾動(dòng)波的偏振、相位、振幅、頻率等特性,從而抑制或破壞其增長或傳播。
根據(jù)對(duì)擾動(dòng)的抑制方式可分為兩類聲學(xué)超表面,一類是吸聲型聲學(xué)超表面,這類聲學(xué)超表面可以耗散聲波能量,進(jìn)而抑制轉(zhuǎn)捩。Malmuth等[45]最先提出使用超聲波吸收表面來抑制轉(zhuǎn)捩的方法,并由加州理工學(xué)院的Rasheed等[48]通過高超聲速尖錐風(fēng)洞試驗(yàn)驗(yàn)證了這一方法的正確性。
第2類是近零阻抗型聲學(xué)超表面。這類聲學(xué)超表面通過調(diào)控聲波的相位,使壁面處的反射聲波與入射波相位相反,實(shí)現(xiàn)相互抵消,從而抑制轉(zhuǎn)捩。趙瑞等[49]考慮了相鄰孔間干擾,詳細(xì)分析了擾動(dòng)和超表面的相互作用情況,提出可抑制Mack第2模態(tài)的近零阻抗型超表面。
2) 控制效果
趙瑞等[50]研究了縫隙型超表面(如圖13所示)對(duì)單頻、寬頻第1模態(tài)的抑制作用,并進(jìn)行了反向設(shè)計(jì),給出了可以抑制第1模態(tài)的聲學(xué)超表面要求。設(shè)計(jì)的聲學(xué)超表面導(dǎo)納相位θ接近0.5π,導(dǎo)納幅值|A|在0~2范圍內(nèi),在不同擾動(dòng)頻率下,各位置第1模態(tài)的增長率都有所降低,說明這一設(shè)計(jì)可以有效地抑制第1模態(tài)。
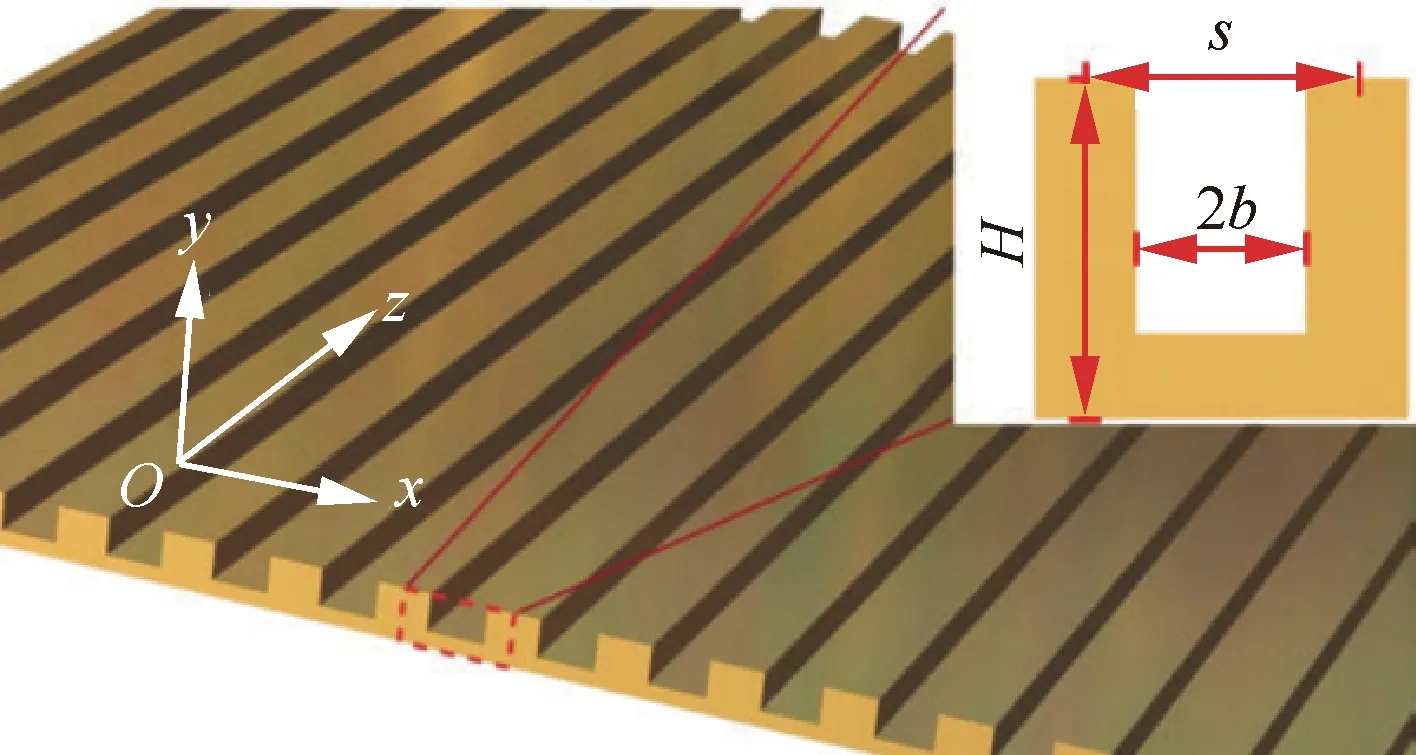
圖13 縫隙型超表面的示意圖[50]
隨著進(jìn)一步研究,王蔚彰等[51]對(duì)更大頻率范圍的第1模態(tài)和第2模態(tài)做出了分析,所得N值曲線如圖14所示。發(fā)現(xiàn)設(shè)計(jì)的超表面在抑制第1模態(tài)的同時(shí),會(huì)增強(qiáng)對(duì)第3模態(tài)的激發(fā)效果,并導(dǎo)致不穩(wěn)定第2模態(tài)的頻率降低,甚至在同一頻率下同時(shí)出現(xiàn)不穩(wěn)定的第1模態(tài)和第2模態(tài)。通過在不同頻率范圍內(nèi)調(diào)節(jié)導(dǎo)納相位和幅值,可實(shí)現(xiàn)寬頻范圍下同時(shí)抑制第1模態(tài)和第2模態(tài)擾動(dòng)波。分析了超表面孔隙率、寬深比、深度等幾何參數(shù)對(duì)導(dǎo)納的影響,提出了一種可實(shí)現(xiàn)性寬頻抑制的分段設(shè)計(jì)方案,并設(shè)計(jì)了兩種相同深度擬合公式聲學(xué)超表面。其中聲學(xué)超表面A從0.05 m處開始每0.01 m分為一段;聲學(xué)超表面B提高了工程上的可實(shí)現(xiàn)性,從0.05 m 處開始,每0.02 m分為一段。兩種聲學(xué)超表面的N值曲線如圖15所示。兩種聲學(xué)超表面對(duì)第1模態(tài)的抑制效果基本相同,分段數(shù)更少的聲學(xué)超表面B對(duì)低頻第2模態(tài)的激發(fā)效果更顯著。整體而言,兩種聲學(xué)超表面均可以在寬頻范圍內(nèi)同時(shí)抑制第1模態(tài)和高頻第2模態(tài),且不過分激發(fā)低頻第2模態(tài)。
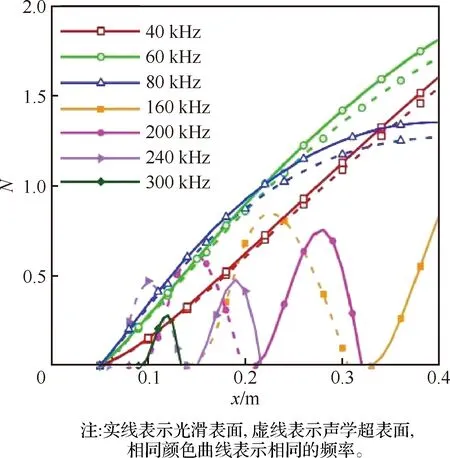
圖14 聲學(xué)超表面與光滑表面的N值曲線對(duì)比圖[51]
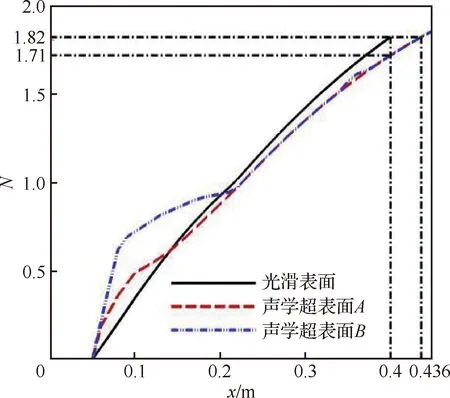
圖15 聲學(xué)超表面與光滑表面N值包絡(luò)線對(duì)比[51]
3) 技術(shù)重點(diǎn)
聲學(xué)超表面的技術(shù)重點(diǎn)在于聲學(xué)超表面的設(shè)計(jì),也就是聲導(dǎo)納參數(shù)的確定,對(duì)于超聲速機(jī)翼設(shè)計(jì),一般情況下僅考慮第1模態(tài)即可,在該馬赫數(shù)下第2模態(tài)還未出現(xiàn)。
聲學(xué)超表面的聲導(dǎo)納取決于壁面材料特性、孔隙率、壁面平均流動(dòng)特性以及擾動(dòng)參數(shù)。設(shè)計(jì)聲學(xué)超表面首先要選擇合適的聲學(xué)超表面微結(jié)構(gòu)類型,然后對(duì)流場(chǎng)進(jìn)行穩(wěn)定性分析,并引入超表面聲學(xué)特性關(guān)系式,得到邊界層中小擾動(dòng)的色散關(guān)系,確定能夠延遲轉(zhuǎn)捩的聲導(dǎo)納幅值和相位。最后通過調(diào)節(jié)聲學(xué)超表面的孔隙率、寬深比、深度等幾何參數(shù)得到目標(biāo)聲導(dǎo)納,達(dá)到延遲轉(zhuǎn)捩的目的。
2.3.2 分布式粗糙元
1) 基本概念
分布式粗糙元(Distributed Roughness Elements,DREs)控制技術(shù)是指在機(jī)翼前緣附近放置一排沿展向的周期性粗糙元陣列來產(chǎn)生振幅均勻的定常橫流渦。在大多數(shù)情況下,分布式粗糙元的添加會(huì)給邊界層引入額外的擾動(dòng),促進(jìn)轉(zhuǎn)捩的發(fā)生。但當(dāng)粗糙元的參數(shù)經(jīng)過精心設(shè)計(jì)后,卻有可能抑制橫流不穩(wěn)定性,從而延遲轉(zhuǎn)捩。
在飛行環(huán)境和低湍流度風(fēng)洞中,后掠翼的橫流轉(zhuǎn)捩由駐波主導(dǎo)。其擾動(dòng)發(fā)展機(jī)制為,小波長擾動(dòng)會(huì)率先增長,但會(huì)沿著下游的運(yùn)動(dòng)逐漸衰減,隨后大波長擾動(dòng)發(fā)展起來,沿流向在很長的距離內(nèi)保持著不穩(wěn)定,甚至通過二次失穩(wěn)而發(fā)展成轉(zhuǎn)捩。Reibert等[52]發(fā)現(xiàn),在機(jī)翼前緣附近放置一排粗糙元可以激發(fā)相應(yīng)波長的駐波模態(tài)。如粗糙元的間距為λ,則激發(fā)的擾動(dòng)波長為λ,λ/2,λ/3,λ/4等,不會(huì)激發(fā)中間波長或波長超過λ的擾動(dòng)。基于此,Saric等[46]提出可通過在前緣附近展向周期性地布置粗糙元來強(qiáng)制增大小波長擾動(dòng),使得大波長擾動(dòng)的增長延后,從而達(dá)到延遲轉(zhuǎn)捩的效果。在亞利桑那州立大學(xué)(ASU)的低湍流度風(fēng)洞試驗(yàn)[46]和Cessna O-2外掛的飛行試驗(yàn)[23]中, DREs的控制效果均得到了驗(yàn)證。NASA的Owens等[53]進(jìn)一步將DREs應(yīng)用到超聲速流場(chǎng)中,也觀察到了后掠機(jī)翼上的轉(zhuǎn)捩延遲。
2) 控制效果
Owens等[25]于2014年在SWT風(fēng)洞中研究了DREs在超聲速條件下對(duì)橫流轉(zhuǎn)捩的控制效果,發(fā)現(xiàn)臨界間距能夠引起轉(zhuǎn)捩提前,而亞臨界間距并未使得轉(zhuǎn)捩延遲。Owens將亞臨界間距的無效性歸結(jié)于粗糙度高度,表示需要進(jìn)一步研究粗糙元高度對(duì)轉(zhuǎn)捩的影響。之后于2019年Owens等[53]在風(fēng)洞試驗(yàn)和飛行試驗(yàn)中證實(shí)了,合適的DREs對(duì)超聲速后掠翼的橫流轉(zhuǎn)捩是有延遲效果的,如圖16和圖17所示。在風(fēng)洞試驗(yàn)中,有效的DREs控制將層流擴(kuò)展了30 mm(約為弦長的5%);在飛行試驗(yàn)中,有效的DREs控制將層流擴(kuò)展了25~30 mm(約為弦長的4%~5%),效果與風(fēng)洞試驗(yàn)基本相當(dāng)。
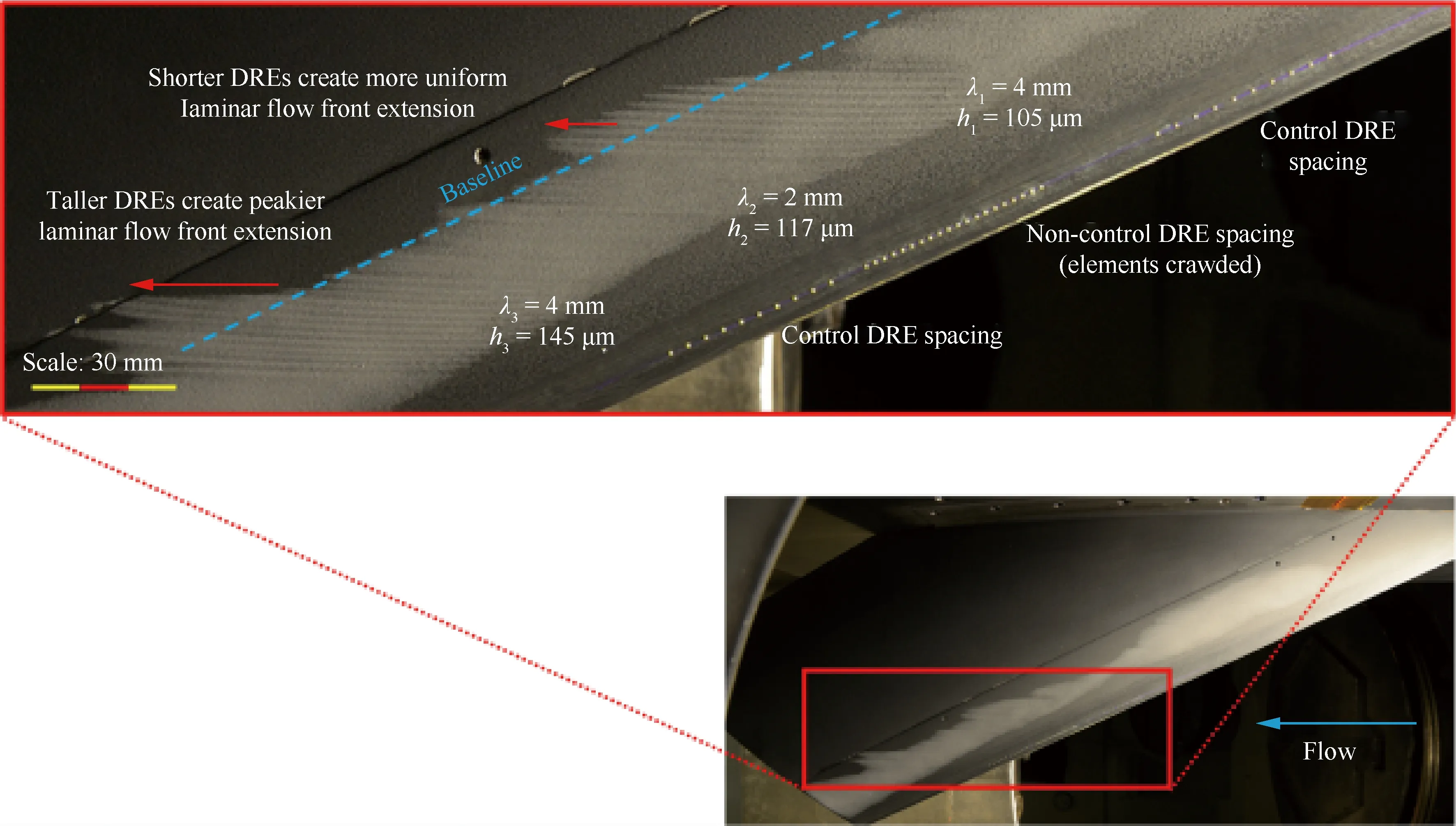
圖16 DRE控制效果的風(fēng)洞升華技術(shù)顯示[53]
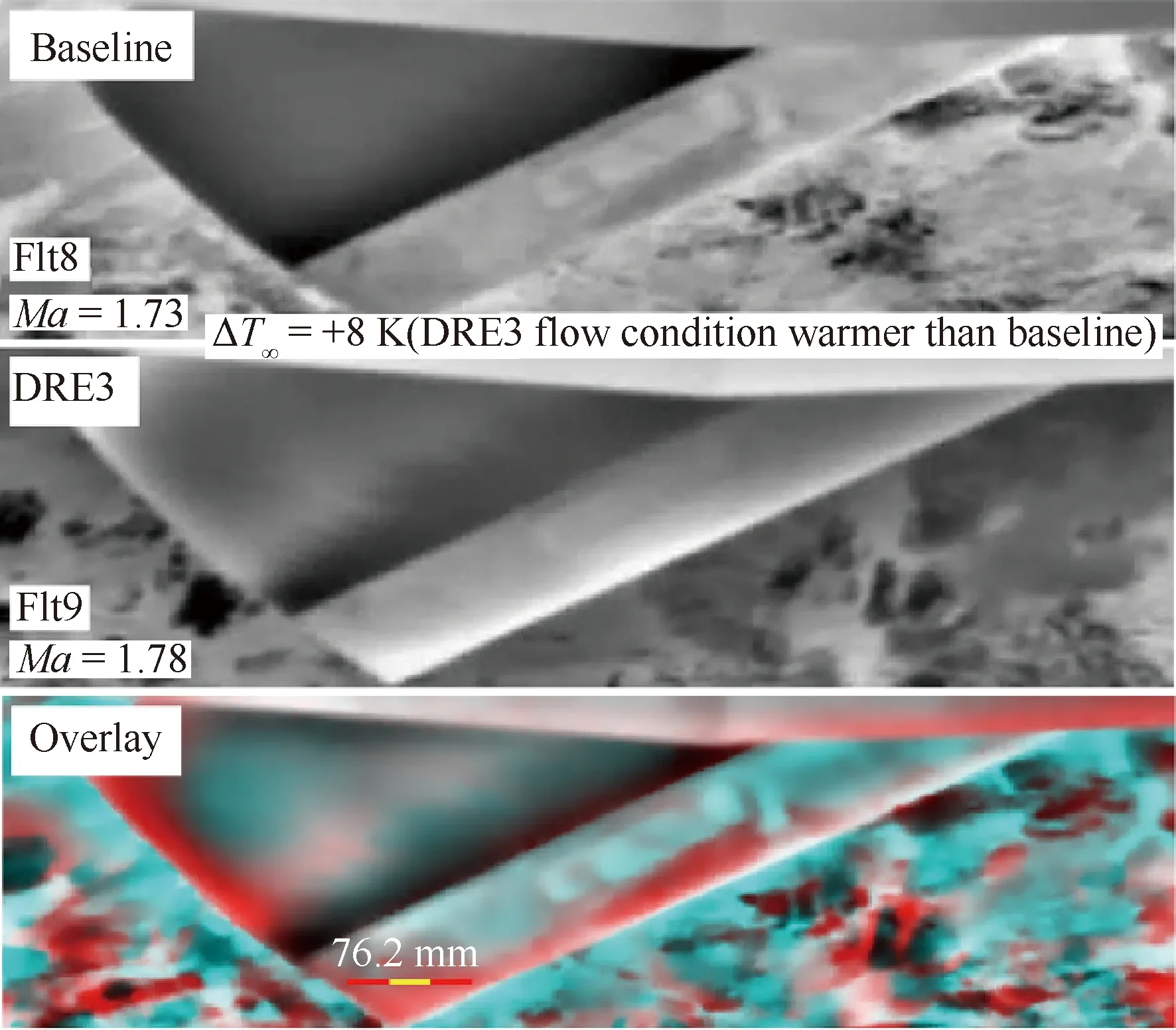
圖17 DRE控制的飛行紅外圖像[53]
Owens等[53]的研究表明,精心設(shè)計(jì)的DREs在超聲速條件下同樣具有控制效果,但30 mm(5%弦長)的層流增加效果并不能滿足超聲速飛機(jī)的層流需求。如果將DREs的作用從擴(kuò)展層流的角度轉(zhuǎn)變?yōu)楸Wo(hù)已建立的層流區(qū)域免受機(jī)翼前緣背景表面粗糙度增加的負(fù)面影響,那么DREs將有助于保持自然層流設(shè)計(jì)的結(jié)果。因?yàn)槟壳暗淖匀粚恿髟O(shè)計(jì)技術(shù)并沒有考慮到機(jī)翼前緣表面粗糙度的影響,實(shí)際上,機(jī)翼前緣總是存在隨機(jī)的背景表面粗糙度(昆蟲污染、油漆、磨損等)。因此,如能將分布式粗糙元層流保持技術(shù)有效地整合到超聲速自然層流設(shè)計(jì)中,將會(huì)使設(shè)計(jì)的層流區(qū)域免受環(huán)境因素的影響。
3) 技術(shù)重點(diǎn)
分布式粗糙元的技術(shù)重點(diǎn)在于選擇合適的粗糙元參數(shù)(包括位置、間距、直徑、高度等)。根據(jù)目前已知的研究結(jié)果,可大致總結(jié)為以下幾條準(zhǔn)則:
1) 粗糙元的位置最好放置于中性點(diǎn)附近,對(duì)于后掠機(jī)翼一般位于2%~5%弦長的前緣處。靠前或者靠后都會(huì)削弱粗糙元的控制效果。
2) 粗糙元的間距應(yīng)小于最不穩(wěn)定波的波長(臨界波長),一般選取臨界波長的2/3。間距超過臨界波長,會(huì)產(chǎn)生強(qiáng)烈放大的波,促使轉(zhuǎn)捩提前發(fā)生;間距過小,粗糙元之間互相干擾導(dǎo)致控制效果減弱。
3) 粗糙元的直徑一般為0.2~0.3 mm。直徑太小不易實(shí)施,太大會(huì)使得間距效應(yīng)減弱,并有可能誘導(dǎo)轉(zhuǎn)捩。Owens等[53]的研究表明臨界波長的展向分量與直徑的比值應(yīng)大于2.7甚至更高。
4) 粗糙元的高度是最難以確定的參數(shù)。高度過低控制效果不明顯,高度過高可能直接誘導(dǎo)轉(zhuǎn)捩。Saric等[24,46]的經(jīng)驗(yàn)表明在亞聲速條件下h/δDRE=0.05~0.1(約12~25 μm)時(shí)最有效;Owens的經(jīng)驗(yàn)表明[53]在超聲速條件下h/δDRE=0.4~0.6(約100~150 μm)時(shí)最有效。其中h為粗糙元高度,δDRE為粗糙元所在位置的邊界層厚度。值得注意的是,在飛行試驗(yàn)的高雷諾數(shù)下,與風(fēng)洞中同等高度的粗糙元會(huì)直接誘導(dǎo)轉(zhuǎn)捩,故將高度降低到h/δ=0.1(約為25 μm)最為有效(不同雷諾數(shù)略有不同),h/δDRE=0.3時(shí)無控制效果,轉(zhuǎn)捩未得到延遲。
2.3.3 等離子體控制技術(shù)
1) 基本概念
等離子體流動(dòng)控制是基于等離子體氣動(dòng)激勵(lì)的主動(dòng)流動(dòng)控制技術(shù),其主要特點(diǎn)為沒有運(yùn)動(dòng)部件、響應(yīng)時(shí)間短、激勵(lì)頻帶寬[54]。根據(jù)放電原理、等離子體特性的不同,等離子體氣動(dòng)激勵(lì)可分為介質(zhì)阻擋放電(DBD)、電弧放電、電暈放電以及其他新型等離子體氣動(dòng)激勵(lì)。其中DBD等離子體流動(dòng)控制是最為常用的等離子體控制技術(shù),其基本原理如圖18所示[55]。
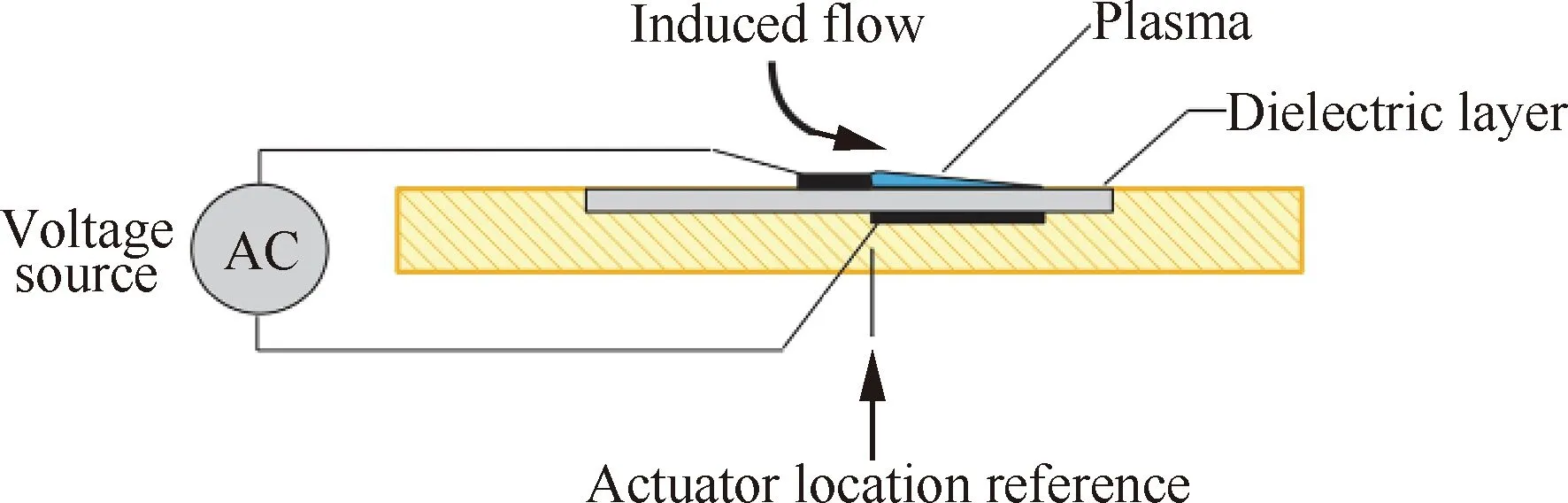
圖18 DBD等離子體激勵(lì)器示意圖[55]
DBD等離子體激勵(lì)器由兩個(gè)電極組成, 一個(gè)電極暴露在空氣中,另一個(gè)電極被電介質(zhì)材料覆蓋。當(dāng)在這兩個(gè)電極之間施加高壓交流電后,電極附近的空氣會(huì)被電離,產(chǎn)生體積力作用于周圍空氣,形成誘導(dǎo)氣流。通過適當(dāng)?shù)嘏渲脙蓚€(gè)電極,等離子體可以誘導(dǎo)任意形狀和方向的氣流。
Corke等[56]使用DBD等離子體激勵(lì)器制作了流向渦發(fā)生器,用于產(chǎn)生類似分布式粗糙元的效應(yīng),來控制定常橫流模態(tài)。如圖19所示,激勵(lì)器由“梳狀”電極組成,這些電極與電介質(zhì)層下側(cè)的單個(gè)總線電極重疊。等離子體被設(shè)計(jì)成在“梳狀”電極的邊緣與下部總線電極重疊的區(qū)域中形成。這就產(chǎn)生了一個(gè)體積力矢量場(chǎng),作用于每個(gè)梳狀電極附近的中性氣流。體積力矢量場(chǎng)被設(shè)計(jì)成引起反向旋轉(zhuǎn)渦流的形成,該渦流類似于由分布式粗糙元產(chǎn)生的渦流。“梳狀”電極的間距被設(shè)計(jì)成激發(fā)臨界或亞臨界定常橫流模態(tài)。Corke等[56]隨后在后掠翼模型上進(jìn)行了試驗(yàn),證明了該控制技術(shù)對(duì)于抑制橫流不穩(wěn)定性的有效性。
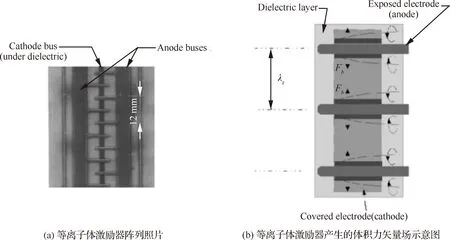
圖19 等離子體激勵(lì)器陣列[56]
2) 控制效果
Serpieri等[57]在后掠翼上使用展向調(diào)制等離子體激勵(lì)器,實(shí)現(xiàn)了定常橫流模態(tài)的選擇性強(qiáng)迫,并且發(fā)現(xiàn)在亞臨界強(qiáng)迫中橫流不穩(wěn)定性的增長小于臨界強(qiáng)迫。D?rr和Kloker[58]采用DNS研究了等離子體激勵(lì)對(duì)后掠平板橫流不穩(wěn)定性的控制效果,通過沿三維邊界層的局部平均流動(dòng)方向放置一排等離子體激勵(lì)器,可以對(duì)橫流產(chǎn)生體力以減小速度分量,同時(shí)激發(fā)亞臨界模態(tài)。但這些研究都是在低速條件下進(jìn)行。
Schuele[59]通過實(shí)驗(yàn)研究了超聲速條件下微米大小的等離子體激勵(lì)器方位角陣列產(chǎn)生的“主動(dòng)粗糙度”對(duì)4.2°迎角尖錐邊界層中定常橫流模態(tài)的激發(fā)。圖20(a)給出了可拆卸錐尖的整體視圖,圖20(b)和圖20(c)顯示了等離子體激勵(lì)器梳狀電極的排列。
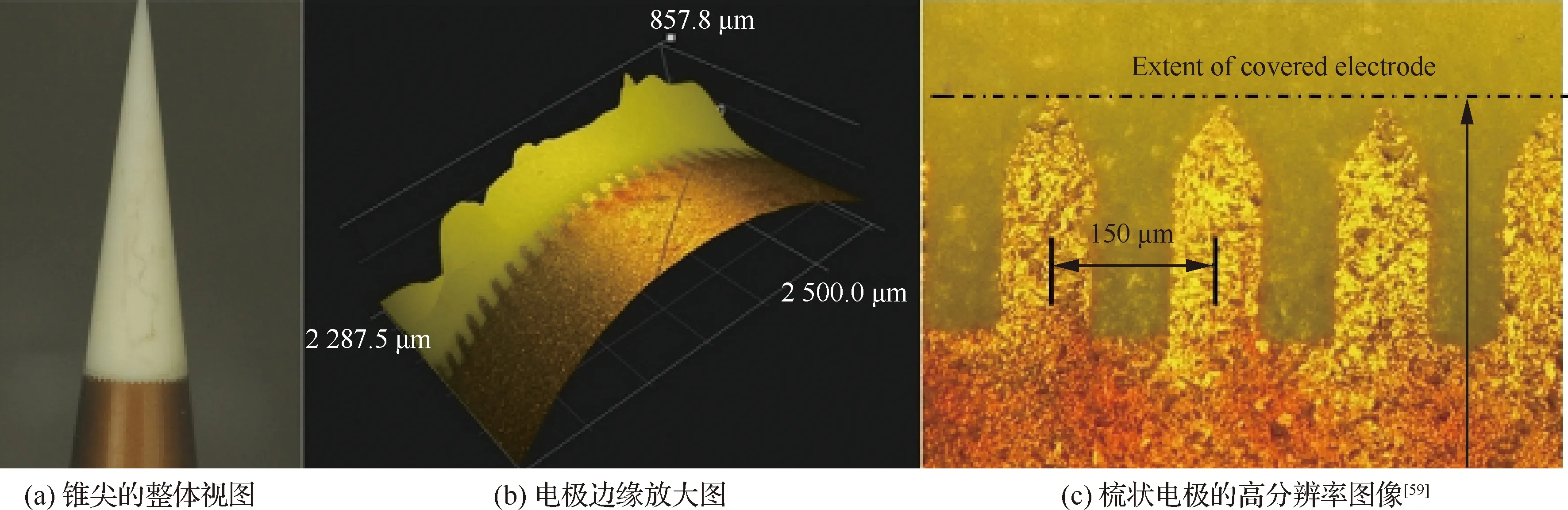
圖20 帶有鋸齒邊梳妝結(jié)構(gòu)的錐尖[59]
基于線性穩(wěn)定性計(jì)算,m=45被選擇為臨界波數(shù),m=68被選擇為亞臨界波數(shù)。使用皮托管探頭在不同軸向位置進(jìn)行方位掃描,測(cè)量了x=5 in (1 in=25.4 mm)到x=9 in的5個(gè)不同軸向位置,增量為1 in,并比較了等離子體開啟(紅色曲線)和關(guān)閉(黑色曲線)的情況,m=68的測(cè)量結(jié)果如圖21所示。
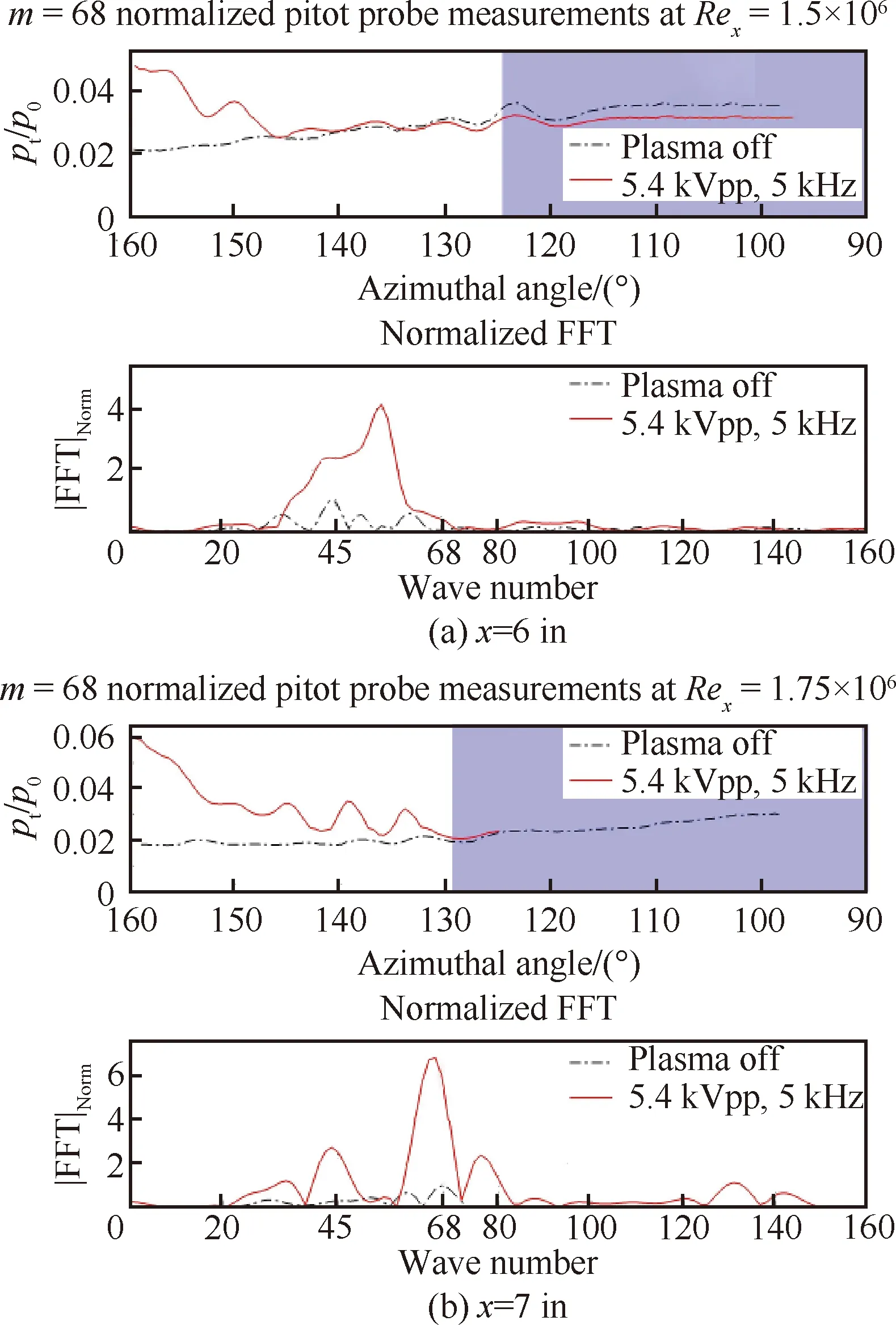
圖21 m=68時(shí)不同軸向位置方位皮托管掃描結(jié)果[59]
從方位角總壓的波數(shù)譜來看,在x=6 in時(shí),m=68波數(shù)的能量略有增加,但仍小于m=55(線性理論預(yù)測(cè)的最大放大波數(shù)帶);到了x=7 in,波數(shù)譜中的主峰已經(jīng)非常接近m=68,而且這個(gè)峰值的幅度要遠(yuǎn)高于等離子體關(guān)閉狀態(tài);到了x=8 in,波數(shù)譜仍然顯示m=68具有很高的能量,然而主要波數(shù)已經(jīng)轉(zhuǎn)移到線性放大范圍之外的更高和更低的波數(shù)。
由此可見,等離子體激勵(lì)器陣列的效果與分布式粗糙元類似,均能夠通過激發(fā)亞臨界模態(tài),來衰減最不穩(wěn)定模態(tài)的增長。
3) 技術(shù)重點(diǎn)
等離子體控制技術(shù)的重點(diǎn)在于產(chǎn)生穩(wěn)定的展向均勻的流向渦流,通過強(qiáng)制增大亞臨界模態(tài)的振幅,來抑制最不穩(wěn)定模態(tài)的增長,因此等離子體激勵(lì)器的布置與分布式粗糙元遵循的原則是基本一致的。除此之外,等離子體激勵(lì)器的設(shè)計(jì)還有兩點(diǎn)需要注意:一是避免等離子體激勵(lì)器帶來表面粗糙度的增加,進(jìn)而直接促發(fā)轉(zhuǎn)捩,特別是應(yīng)用于彎曲表面時(shí);二是在高雷諾數(shù)下,流動(dòng)邊界層物理厚度變薄,激勵(lì)器的間距會(huì)很小,因此電極的物理尺寸也要足夠小,這對(duì)實(shí)際應(yīng)用將是很大的挑戰(zhàn)。
3 超聲速層流設(shè)計(jì)評(píng)估技術(shù)
超聲速層流布局設(shè)計(jì)評(píng)估主要是對(duì)超聲速轉(zhuǎn)捩現(xiàn)象的精準(zhǔn)預(yù)測(cè)。目前的評(píng)估技術(shù)主要有數(shù)值模擬技術(shù)、風(fēng)洞試驗(yàn)技術(shù)和飛行試驗(yàn)技術(shù),本節(jié)對(duì)其進(jìn)行簡(jiǎn)要的介紹。
3.1 數(shù)值模擬
超聲速轉(zhuǎn)捩的數(shù)值模擬技術(shù)主要可分為直接數(shù)值模擬(DNS)、大渦模擬(LES)、間歇因子輸運(yùn)模型(RANS)和穩(wěn)定性分析方法,DNS和LES方法因受制于計(jì)算量限制,目前僅用于簡(jiǎn)單外形的機(jī)理研究,穩(wěn)定性分析方法和間歇因子輸運(yùn)模型方法是工程中常用的轉(zhuǎn)捩特性評(píng)估方法,本節(jié)對(duì)其概念和實(shí)施方式進(jìn)行簡(jiǎn)要介紹。
3.1.1 線性穩(wěn)定性分析方法(eN方法)
穩(wěn)定性分析方法是分析復(fù)雜系統(tǒng)動(dòng)力學(xué)特性的典型方法。對(duì)于超聲速轉(zhuǎn)捩而言,需要判定的是Navier-Stokes方程的穩(wěn)定性,已經(jīng)發(fā)展的方法包括線性穩(wěn)定性理論 (LST)、線性拋物化穩(wěn)定性方程(LPSE)、非線性拋物化穩(wěn)定性方程(NPSE)等。其中工程上最常用的方法是線性穩(wěn)定性分析方法,也稱為eN方法。
eN方法是20世紀(jì)50年代由Smith[60]和van Ingen[61]首先提出,基于LST計(jì)算擾動(dòng)幅值的線性增長因子(N值)來判斷轉(zhuǎn)捩是否發(fā)生的預(yù)測(cè)方法。其主要思想是:對(duì)邊界層中存在的小擾動(dòng)進(jìn)行線性穩(wěn)定性分析,如果擾動(dòng)最終衰減,則是穩(wěn)定的;如果擾動(dòng)幅值被放大,則是不穩(wěn)定的。在不穩(wěn)定的擾動(dòng)向下游傳播過程中,從其幅值開始放大處沿下游方向積分增長率可以得到幅值的放大倍數(shù)eN,取對(duì)數(shù)后為N值。當(dāng)擾動(dòng)的N值達(dá)到轉(zhuǎn)捩判據(jù)NT時(shí),則可判定轉(zhuǎn)捩發(fā)生[62]。
在傳統(tǒng)的eN方法中,NT主要依靠試驗(yàn)或經(jīng)驗(yàn)來確定。對(duì)于航空飛行器來說,通過大量的風(fēng)洞試驗(yàn)和飛行試驗(yàn),確定NT的值一般取為9左右。在環(huán)境噪聲比較小,且大部分?jǐn)_動(dòng)為線性波時(shí),采用這種分析方法可獲得比較理想的結(jié)果。但對(duì)于超聲速情況,NT取值需要另行確定[63]。雖然基于線性理論的eN方法對(duì)NT的取值沒有普適性,且忽略了非局部效應(yīng)、非線性效應(yīng)等,但該方法仍是工程界預(yù)測(cè)轉(zhuǎn)捩最有效的方法。
目前eN方法在航空航天飛行器轉(zhuǎn)捩預(yù)測(cè)中得到了廣泛的應(yīng)用,但是絕大多數(shù)是針對(duì)亞聲速問題,少部分針對(duì)高超聲速問題,相比而言針對(duì)超聲速流動(dòng)轉(zhuǎn)捩開展的eN方法研究并不廣泛。基于該方法發(fā)展出來的比較有代表性的轉(zhuǎn)捩預(yù)測(cè)軟件有eMalik軟件、LASTRAC軟件、PMNS3D軟件等,這里簡(jiǎn)介如下。
1) eMalik軟件
eMalik是美國國家航空航天局(NASA)的Malik等[64]基于LST編寫的轉(zhuǎn)捩預(yù)測(cè)軟件。該軟件開發(fā)時(shí)間比較早,功能比較簡(jiǎn)單,是最早公開報(bào)道的成熟轉(zhuǎn)捩預(yù)測(cè)程序,可以對(duì)三維復(fù)雜外形的轉(zhuǎn)捩問題進(jìn)行預(yù)測(cè)。
eMalik軟件在工程轉(zhuǎn)捩預(yù)測(cè)中起到了重要作用。Berry等[65]曾使用eMalik對(duì)高超聲速邊界層轉(zhuǎn)捩(Hypersonic Boundary Layer Transition)飛行試驗(yàn)使用的模型進(jìn)行了流動(dòng)轉(zhuǎn)捩預(yù)測(cè)分析,并指出該模型上的主導(dǎo)轉(zhuǎn)捩的失穩(wěn)類型應(yīng)該是橫流失穩(wěn)。
2) LASTRAC軟件
NASA的Chang[66]基于LST、PSE等開發(fā)了一套流動(dòng)穩(wěn)定性分析和轉(zhuǎn)捩預(yù)測(cè)的LASTRAC軟件,該軟件是目前功能相對(duì)較全的轉(zhuǎn)捩預(yù)測(cè)程序,除LST外,還支持線性PSE和非線性PSE,可用于二維和三維問題,同時(shí)新版本支持非正交坐標(biāo)系。
Chang等[67]使用LASTRAC軟件對(duì)HIFiRe-5模型進(jìn)行了N值計(jì)算,得到了N值分布云圖。結(jié)果表明,使用LASTRAC軟件計(jì)算得到的N值分布云圖與流動(dòng)轉(zhuǎn)捩實(shí)驗(yàn)中測(cè)得的溫度分布圖在定性上是類似的。進(jìn)一步說明該軟件在工程上得到了成功的應(yīng)用。
3) PMNS3D軟件
國內(nèi)也開展了轉(zhuǎn)捩預(yù)測(cè)eN方法的應(yīng)用研究。PMNS3D是西北工業(yè)大學(xué)自主研發(fā)的采用耦合eN轉(zhuǎn)捩預(yù)測(cè)方法的三維RANS方程求解器[68],可以對(duì)機(jī)翼邊界層內(nèi)由T-S波不穩(wěn)定性和C-F波不穩(wěn)定性導(dǎo)致的轉(zhuǎn)捩進(jìn)行預(yù)測(cè)。該求解器主要由3個(gè)模塊構(gòu)成:① 三維RANS方程求解模塊; ② 三維層流邊界層方程求解模塊; ③ 基于線性穩(wěn)定性理論的eN轉(zhuǎn)捩預(yù)測(cè)模塊。不同模塊耦合流程如圖22所示[68]。
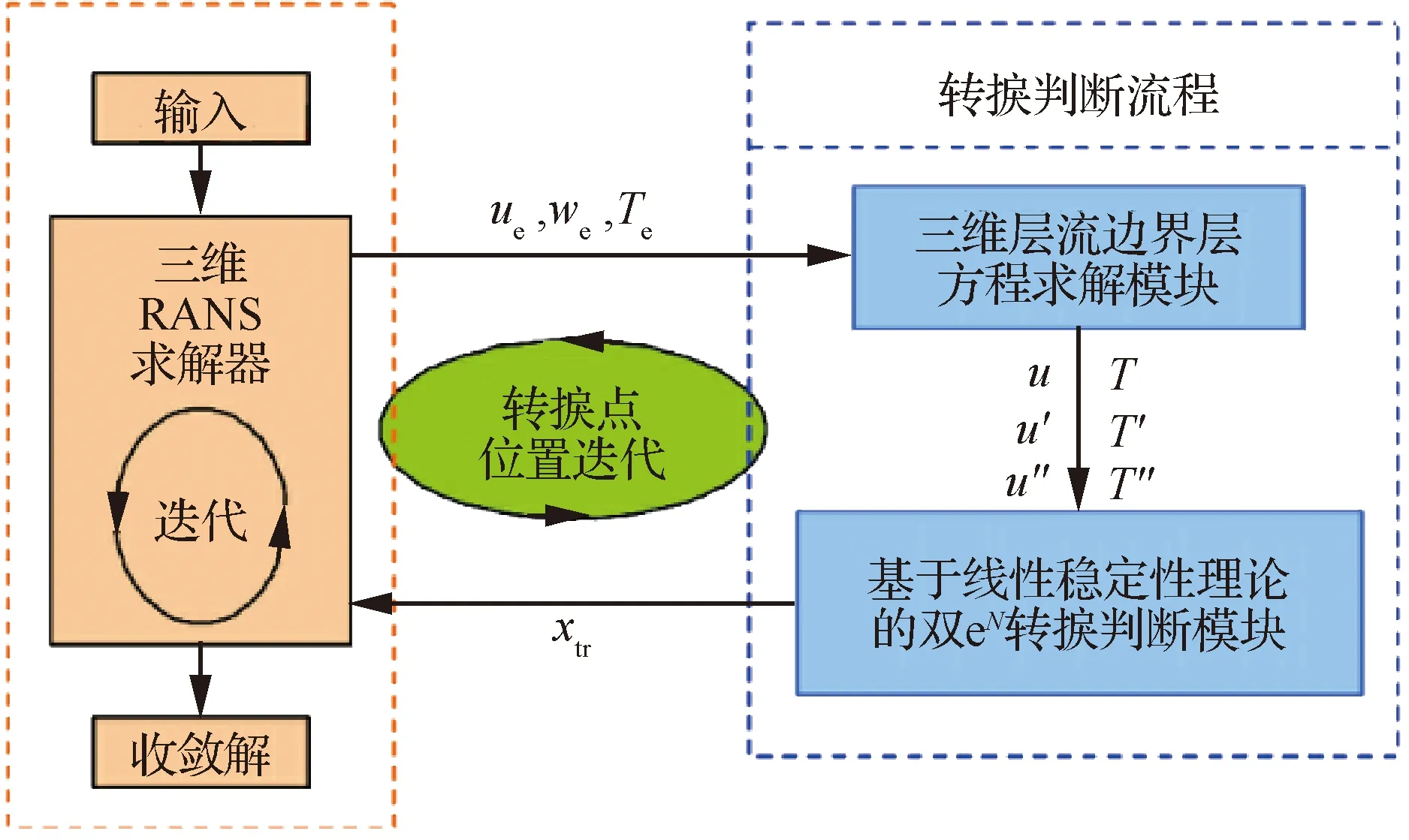
圖22 RANS求解器耦合轉(zhuǎn)捩預(yù)測(cè)模型的流程[68]
4) 天津大學(xué)的轉(zhuǎn)捩預(yù)測(cè)軟件
天津大學(xué)的黃章峰等[69-70]提出了高超聲速邊界層轉(zhuǎn)捩預(yù)測(cè)軟件的實(shí)現(xiàn)途徑,其基本思路是結(jié)合流動(dòng)穩(wěn)定性分析和轉(zhuǎn)捩工程應(yīng)用方面的經(jīng)驗(yàn),建立特征值、感受性等一系列知識(shí)庫,具體的軟件流程圖與知識(shí)庫的關(guān)系如圖23所示[70]。目前該軟件已經(jīng)完成了實(shí)用、智能的軟件設(shè)計(jì),編碼實(shí)現(xiàn)了多塊結(jié)構(gòu)化網(wǎng)格外形流場(chǎng)的基本流處理、轉(zhuǎn)捩位置評(píng)估等全自動(dòng)操作,并在工程應(yīng)用單位進(jìn)行了初步應(yīng)用。
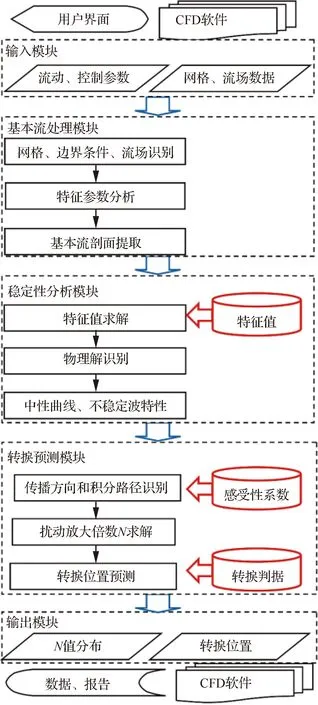
圖23 軟件流程圖與知識(shí)庫的關(guān)系[70]
除此之外,還有一些針對(duì)轉(zhuǎn)捩預(yù)測(cè)的方法和軟件,目前主要針對(duì)亞聲速流動(dòng),在超聲速流動(dòng)中還未得到成熟應(yīng)用,如法國宇航院(ONERA)的eN-Database轉(zhuǎn)捩預(yù)測(cè)方法[71]、德國宇航中心(DLR)開發(fā)的LILO軟件[72-73]、瑞典國防研究局(FOI)將eN-Database與求解器Edge耦合得到的轉(zhuǎn)捩預(yù)測(cè)軟件[74]、航空工業(yè)空氣動(dòng)力研究院(以下簡(jiǎn)稱航空工業(yè)氣動(dòng)院)的非結(jié)構(gòu)RANS求解器耦合eN-Database的轉(zhuǎn)捩預(yù)測(cè)方法等[75],這里就不再作詳細(xì)介紹。
3.1.2 間歇因子輸運(yùn)模型
基于RANS的轉(zhuǎn)捩預(yù)測(cè)方法相比于采用DNS和LES方法預(yù)測(cè)轉(zhuǎn)捩所需計(jì)算量小,更適用于轉(zhuǎn)捩預(yù)測(cè)的工程應(yīng)用,也是開展邊界層轉(zhuǎn)捩研究的重要模式。
近年來,基于RANS方法已發(fā)展了多種轉(zhuǎn)捩預(yù)測(cè)模型[76],但相對(duì)于已知低速邊界層轉(zhuǎn)捩(由二維Tollmien-Schlichting不穩(wěn)定波[77]主導(dǎo)),高馬赫數(shù)邊界層的轉(zhuǎn)捩過程則是由高階不穩(wěn)定模態(tài)[27,78]主導(dǎo),受多種因素影響且敏感性問題突出。基于RANS模式所建立的轉(zhuǎn)捩模型若不能正確反映上述機(jī)制,則無法正確預(yù)測(cè)其轉(zhuǎn)捩過程。另外,不同于物體幾何特征簡(jiǎn)單的幾何模型(如平板、錐型等),超聲速飛機(jī)外形通常較為復(fù)雜,在真實(shí)飛行器的三維邊界層中,存在明顯的橫流效應(yīng),成為三維邊界層轉(zhuǎn)捩的主導(dǎo)因素[79]。因此,迫切需要發(fā)展可正確描述高馬赫數(shù)邊界層轉(zhuǎn)捩特有物理過程、適用于三維飛行器復(fù)雜外形邊界層轉(zhuǎn)捩預(yù)測(cè)、具備預(yù)測(cè)橫向流動(dòng)轉(zhuǎn)捩能力的轉(zhuǎn)捩模型。
間歇因子輸運(yùn)模型是一種工程轉(zhuǎn)捩預(yù)測(cè)的數(shù)值方法。在轉(zhuǎn)捩過程中,流動(dòng)在同一空間位置會(huì)間歇性地呈現(xiàn)層流或湍流狀態(tài),稱為間歇現(xiàn)象。間歇因子γ被定義為空間某點(diǎn)流態(tài)是湍流的概率。γ=0時(shí)為層流;γ=1時(shí)為湍流;γ從近似為0突然增長到1的位置被認(rèn)為是轉(zhuǎn)捩位置。對(duì)于簡(jiǎn)單外形,在經(jīng)驗(yàn)關(guān)系式的基礎(chǔ)上,采用間歇因子輸運(yùn)方程可以很好地預(yù)測(cè)轉(zhuǎn)捩點(diǎn)與轉(zhuǎn)捩區(qū)間。但由于經(jīng)驗(yàn)關(guān)系式需要采用非局部變量,對(duì)于復(fù)雜外形飛行器繞流,這些非局部變量的獲取將會(huì)帶來較大的計(jì)算量,且往往要引入較大誤差,發(fā)展基于當(dāng)?shù)刈兞康霓D(zhuǎn)捩預(yù)測(cè)模型逐漸成為共識(shí)[80-81]。
1) 基于當(dāng)?shù)刈兞康摩?Reθ t模型
為了建立基于當(dāng)?shù)刈兞康霓D(zhuǎn)捩預(yù)測(cè)模型,Langtry和Menter[80]首先提出了渦量雷諾數(shù)的概念,避免了求解邊界層的厚度等非當(dāng)?shù)亓浚瑫r(shí)通過擬合不可壓平板邊界層轉(zhuǎn)捩實(shí)驗(yàn)數(shù)據(jù)提出了一種基于當(dāng)?shù)刈兞康摩?Reθ t模型。該模型在k-ωSST湍流模型的基礎(chǔ)上加入了兩個(gè)額外的輸運(yùn)方程。其一是間歇因子γ輸運(yùn)方程,該方程通過控制邊界層內(nèi)湍動(dòng)能生成項(xiàng)來觸發(fā)和控制轉(zhuǎn)捩過程;其二是關(guān)于轉(zhuǎn)捩起始動(dòng)量厚度雷諾數(shù)Reθ t的輸運(yùn)方程,用以保證所建立的模型方程中不含顯式的非當(dāng)?shù)亓俊angtry和Menter將上述兩輸運(yùn)方程與k-ωSST湍流模型進(jìn)行耦合,構(gòu)造了一個(gè)四方程的轉(zhuǎn)捩預(yù)測(cè)模型,實(shí)現(xiàn)了對(duì)低速轉(zhuǎn)捩現(xiàn)象的模擬。
γ-Reθ t模型目前已經(jīng)成功得到包括低速自然轉(zhuǎn)捩、Bypass轉(zhuǎn)捩和分離轉(zhuǎn)捩等多種算例的驗(yàn)證。許多學(xué)者開始將該模型應(yīng)用于高超聲速邊界層轉(zhuǎn)捩模擬。Frauholz等[82]將γ-Reθ t模型引入Eisfeld的RSM湍流模型并應(yīng)用于超燃沖壓發(fā)動(dòng)機(jī)的數(shù)值模擬中。Cheng等[83]對(duì)壓力梯度和轉(zhuǎn)捩長度關(guān)系式進(jìn)行修正,對(duì)馬赫數(shù)為8的尖錐進(jìn)行了數(shù)值模擬,研究了來流湍流度和網(wǎng)格密度對(duì)轉(zhuǎn)捩模擬結(jié)果的影響。Bensassi等[84]模擬了高超聲速軸對(duì)稱圓錐轉(zhuǎn)捩流動(dòng),計(jì)算結(jié)果與實(shí)驗(yàn)符合較好。國內(nèi),張玉倫[85]和張毅鋒[86]等對(duì)γ-Reθ t模型開展了高馬赫數(shù)重新標(biāo)定研究。尚慶[87]和劉周[88]等采用γ-Reθ t模型對(duì)高超聲速尖錐及鈍雙楔開展了數(shù)值模擬研究。鄭赟等[89]參考部分高超聲速風(fēng)洞的試驗(yàn)數(shù)據(jù)嘗試對(duì)γ-Reθ t模型經(jīng)驗(yàn)關(guān)聯(lián)式進(jìn)行改進(jìn)。張曉東[90]、郝子輝[91]以及尤延誠[92]等對(duì)γ-Reθ t模型進(jìn)行了高馬赫數(shù)修正并應(yīng)用于高馬赫數(shù)邊界層的轉(zhuǎn)捩預(yù)測(cè)。
2) 基于當(dāng)?shù)刈兞繕?gòu)造的K-ω-γ模型
基于層流脈動(dòng)能概念,Walters和Leylek[93]將湍動(dòng)能分解,并通過引入層流與湍流中的相互作用,建立了一種基于當(dāng)?shù)刈兞康膋-kL-ε三方程轉(zhuǎn)捩模型[94]。該模型在低速平板、翼型實(shí)現(xiàn)了轉(zhuǎn)捩的準(zhǔn)確模擬,該模型并未引入間歇因子的概念,并且方程中各項(xiàng)的模化工作主要依賴數(shù)值試驗(yàn),模型中參數(shù)過多。雖然k-kL-ε模型也建立在當(dāng)?shù)刈兞康幕A(chǔ)上,易于集成到并行化CFD程序中,但其原始模型針對(duì)低速問題設(shè)計(jì),未能考慮到超聲速邊界層轉(zhuǎn)捩特有的多模態(tài)主導(dǎo)轉(zhuǎn)捩的現(xiàn)象。為此,王亮和符松[95-96]在Menter等[80]的研究基礎(chǔ)上,通過構(gòu)造一種等效特征長度尺度并將其應(yīng)用于總脈動(dòng)動(dòng)能及間歇因子輸運(yùn)方程的封閉模化中,針對(duì)高超聲速邊界層轉(zhuǎn)捩預(yù)測(cè)提出了一種基于當(dāng)?shù)刈兞康腒-ω-γ三方程模型;周玲和閆超等[97]對(duì)K-ω-γ轉(zhuǎn)捩模式進(jìn)行了改進(jìn),采用網(wǎng)格預(yù)處理技術(shù),可以快速大規(guī)模并行獲取具有非當(dāng)?shù)刈兞繉傩缘倪吔鐚訁?shù),同時(shí)考慮了橫流轉(zhuǎn)捩,具有推廣至工程復(fù)雜外形應(yīng)用的潛力。
K-ω-γ模型以k-ωSST湍流模型為基礎(chǔ),基于當(dāng)?shù)刈兞繕?gòu)造的高超聲速轉(zhuǎn)捩預(yù)測(cè)模型,由總脈動(dòng)動(dòng)能K、比耗散率ω以及間歇因子γ的輸運(yùn)方程構(gòu)成。該轉(zhuǎn)捩模型的主要思想是通過求解層流脈動(dòng)能kL和間歇因子γ的輸運(yùn)方程來模擬轉(zhuǎn)捩過程。層流脈動(dòng)能kL物理上代表轉(zhuǎn)捩之前不穩(wěn)定波的發(fā)展,其輸運(yùn)方程求解結(jié)果主要作用是用于預(yù)測(cè)轉(zhuǎn)捩區(qū)的起始位置。層流脈動(dòng)能輸運(yùn)方程的生成項(xiàng)反映不穩(wěn)定波隨流向幅值的放大引起kL增大的過程,從而使得實(shí)際中的不穩(wěn)定波幅值達(dá)到臨界點(diǎn)引起轉(zhuǎn)捩時(shí),kL也達(dá)到模型中轉(zhuǎn)捩起始的要求。生成項(xiàng)中最重要的參數(shù)是反映第1、第2模態(tài)的不穩(wěn)定擾動(dòng)波發(fā)展的時(shí)間尺度模型。K-ω-γ模型中并未單獨(dú)為層流脈動(dòng)能kL構(gòu)造輸運(yùn)方程,而是層流脈動(dòng)能和湍動(dòng)能共享一個(gè)輸運(yùn)方程,并通過引入有效渦黏性系數(shù)來完成轉(zhuǎn)捩之前層流脈動(dòng)能方程和湍動(dòng)能方程之間的切換。K-ω-γ模型中另外一個(gè)輸運(yùn)方程是間歇因子γ的輸運(yùn)方程,其主要作用是在kL增大到一定程度并觸發(fā)轉(zhuǎn)捩之后模擬轉(zhuǎn)捩的整個(gè)過程。該模型在近期也得到了不斷的關(guān)注和發(fā)展。
3.2 風(fēng)洞試驗(yàn)
風(fēng)洞試驗(yàn)由于成本低、效率高、測(cè)量技術(shù)豐富、能夠比較真實(shí)地反應(yīng)轉(zhuǎn)捩現(xiàn)象,是目前進(jìn)行超聲速邊界層轉(zhuǎn)捩研究和層流評(píng)估的主要手段。本小節(jié)重點(diǎn)對(duì)風(fēng)洞試驗(yàn)的難點(diǎn)、轉(zhuǎn)捩位置測(cè)量技術(shù)和相關(guān)影響因素進(jìn)行介紹。
3.2.1 風(fēng)洞試驗(yàn)的難點(diǎn)
在風(fēng)洞試驗(yàn)中進(jìn)行層流研究必須面對(duì)一個(gè)重要問題,就是試驗(yàn)段的擾動(dòng)水平。擾動(dòng)水平的高低對(duì)轉(zhuǎn)捩過程有著不可忽視的影響。對(duì)于大型超聲速風(fēng)洞,上游整流裝置、噴管邊界層、氣動(dòng)噪聲等都會(huì)給流場(chǎng)帶來擾動(dòng)。因此,風(fēng)洞的擾動(dòng)水平要遠(yuǎn)高于飛行環(huán)境。在1985—1987年間的Falcon50垂尾尾流自由飛實(shí)驗(yàn)中,測(cè)得馬赫數(shù)為0.65 條件下相對(duì)壓力脈動(dòng)P′/Q<0.4%,湍流度Tu<0.025%,;而在S2MA風(fēng)洞中,測(cè)得的P′/Q≈1.6%,Tu≈0.19%,分別比飛行測(cè)量的擾動(dòng)水平高4和7.5倍[12]。為了獲得真實(shí)的轉(zhuǎn)捩現(xiàn)象和可靠的轉(zhuǎn)捩數(shù)據(jù),理論上超聲速風(fēng)洞的來流湍流度應(yīng)小于0.05%,但受限于風(fēng)洞馬赫數(shù)范圍和尺寸限制,一般都難以達(dá)到。圖24[25]給出了NASA的SWT超聲速風(fēng)洞在馬赫數(shù)2.0時(shí)10 psi(1 psi=6 894.757 Pa)總壓下自由流質(zhì)量流量的波動(dòng)水平,其質(zhì)量流量的波動(dòng)在0.1%以下,已經(jīng)是比較理想的測(cè)量設(shè)備了。
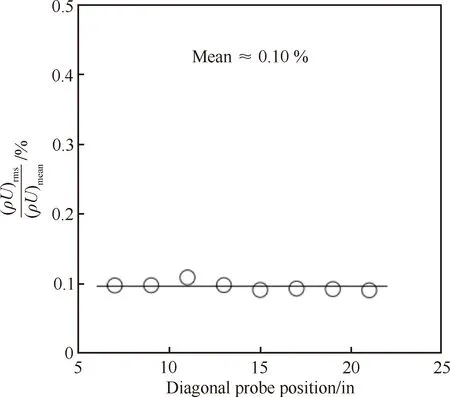
圖24 馬赫數(shù)2.0時(shí)熱線探針自由流擾動(dòng)水平的測(cè)量值[25]
圖25給出了法國S2MA風(fēng)洞超聲速試驗(yàn)段的壓力和速度波動(dòng)水平。在0.5~1.5 bar(1 bar=105Pa)的總壓范圍內(nèi),馬赫數(shù)1.5~2.5之間,壓力和速度波動(dòng)在0.1%~0.24%之間。采用Mack[98]提出的關(guān)于臨界N因子和自由流湍流度Tu的關(guān)系式:
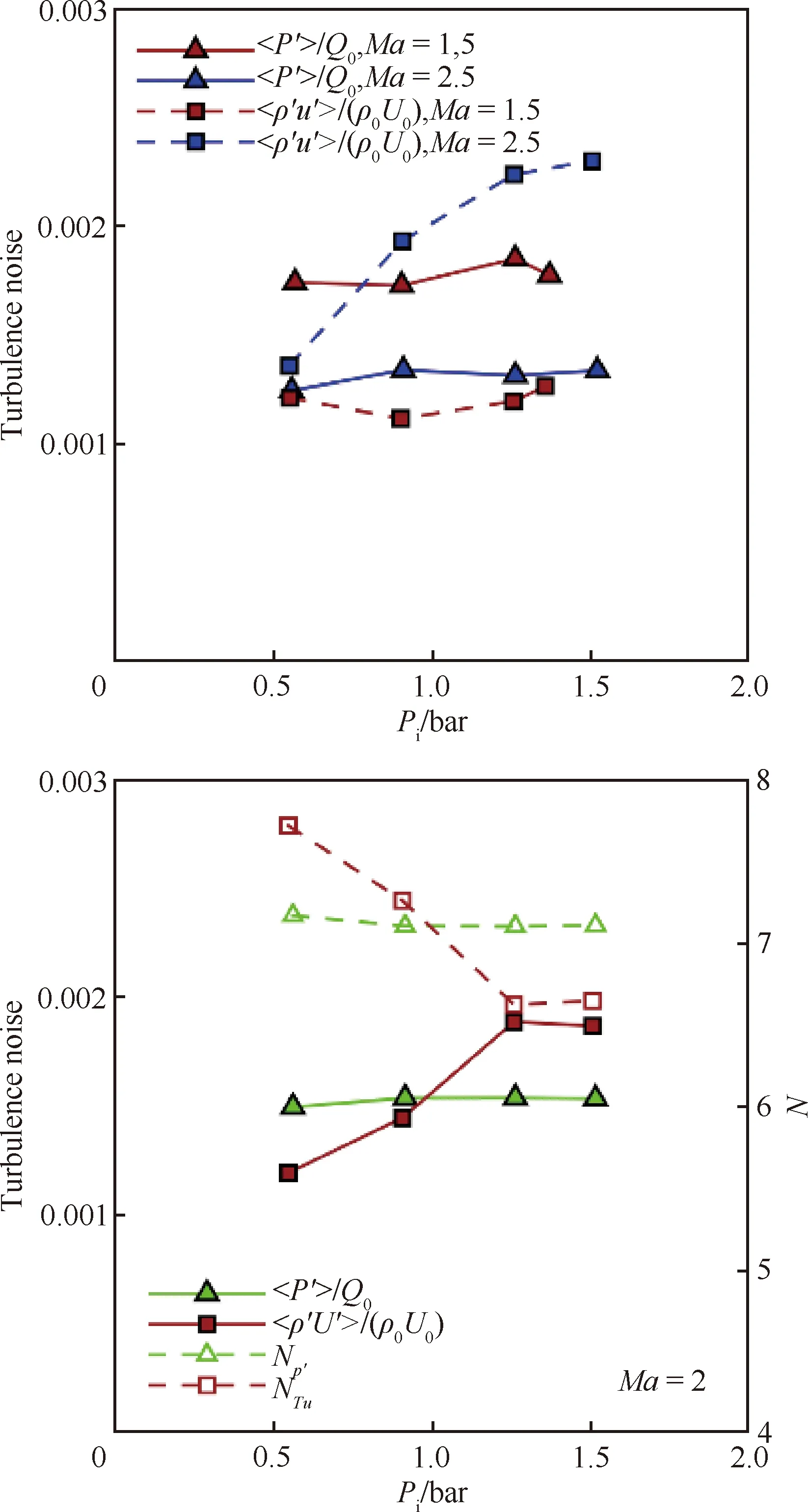
圖25 S2MA試驗(yàn)段的自由流擾動(dòng)和相應(yīng)的N因子[12]
NT=-8.42-2.4×lnTu
(6)
計(jì)算得到的NT在6.5(0.5 bar)~8(1.5 bar)之間,在目前的超聲速風(fēng)洞中屬于低噪聲風(fēng)洞。
航空工業(yè)空氣動(dòng)力研究院也開展了FL-1超聲速風(fēng)洞的背景擾動(dòng)測(cè)量和分解研究。圖26為擾動(dòng)綜合測(cè)量裝置,包括了靜壓傳感器、熱線探針、皮托管。實(shí)驗(yàn)測(cè)量了馬赫數(shù)2.0和3.0時(shí)的風(fēng)洞來流靜壓脈動(dòng)與激波后總壓脈動(dòng),結(jié)果如表1所示。從聲波擾動(dòng)模態(tài)的幅值來看,該風(fēng)洞背景噪聲較大,屬于典型的噪聲風(fēng)洞。后續(xù)將結(jié)合熱線測(cè)量結(jié)果進(jìn)行來流擾動(dòng)模態(tài)的分解工作,以期獲得更多的風(fēng)洞背景擾動(dòng)信息。
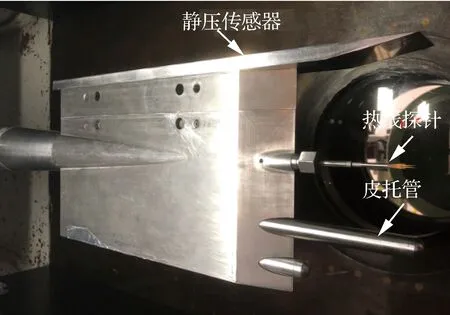
圖26 風(fēng)洞來流擾動(dòng)綜合測(cè)量裝置
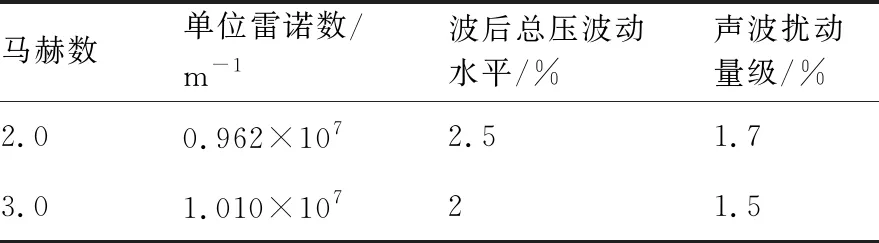
表1 FL-1超聲速風(fēng)洞來流擾動(dòng)測(cè)量結(jié)果
從物理角度看,風(fēng)洞試驗(yàn)雖不能復(fù)現(xiàn)飛行環(huán)境,從風(fēng)洞試驗(yàn)中獲得的轉(zhuǎn)捩數(shù)據(jù)需進(jìn)行一定的修正才能與飛行試驗(yàn)保持一致。但即便如此,在風(fēng)洞中開展轉(zhuǎn)捩試驗(yàn)依然是有意義的,其仍能給出合理的趨勢(shì),特別是便于測(cè)量并提供有關(guān)擾動(dòng)放大和流動(dòng)向湍流轉(zhuǎn)變的重要信息。
3.2.2 轉(zhuǎn)捩位置測(cè)量
對(duì)于超聲速邊界層轉(zhuǎn)捩探測(cè),常用的手段有:動(dòng)態(tài)壓力傳感器、熱流傳感器、熱線風(fēng)速儀、紅外熱像技術(shù)、溫敏漆技術(shù)和升華法等。
動(dòng)態(tài)壓力傳感器、熱流傳感器、熱線風(fēng)速儀都是根據(jù)所測(cè)物理量在層流和湍流區(qū)域波動(dòng)水平的差異來確定轉(zhuǎn)捩位置。這種方法通常需要迎角或者雷諾數(shù)的連續(xù)變化來判斷測(cè)點(diǎn)是位于層流區(qū)還是湍流區(qū)。因此,通過這種方法只能得到大致的轉(zhuǎn)捩位置。JAXA在NEXST-1的風(fēng)洞試驗(yàn)中就使用了這種方法,如圖27所示[99]。隨著迎角由負(fù)變正逐漸增大,壓力波動(dòng)的均方根值先保持不變后陡然增大,接著迅速下降。據(jù)此可以判斷,該點(diǎn)在尖峰對(duì)應(yīng)的迎角附近發(fā)生轉(zhuǎn)捩。
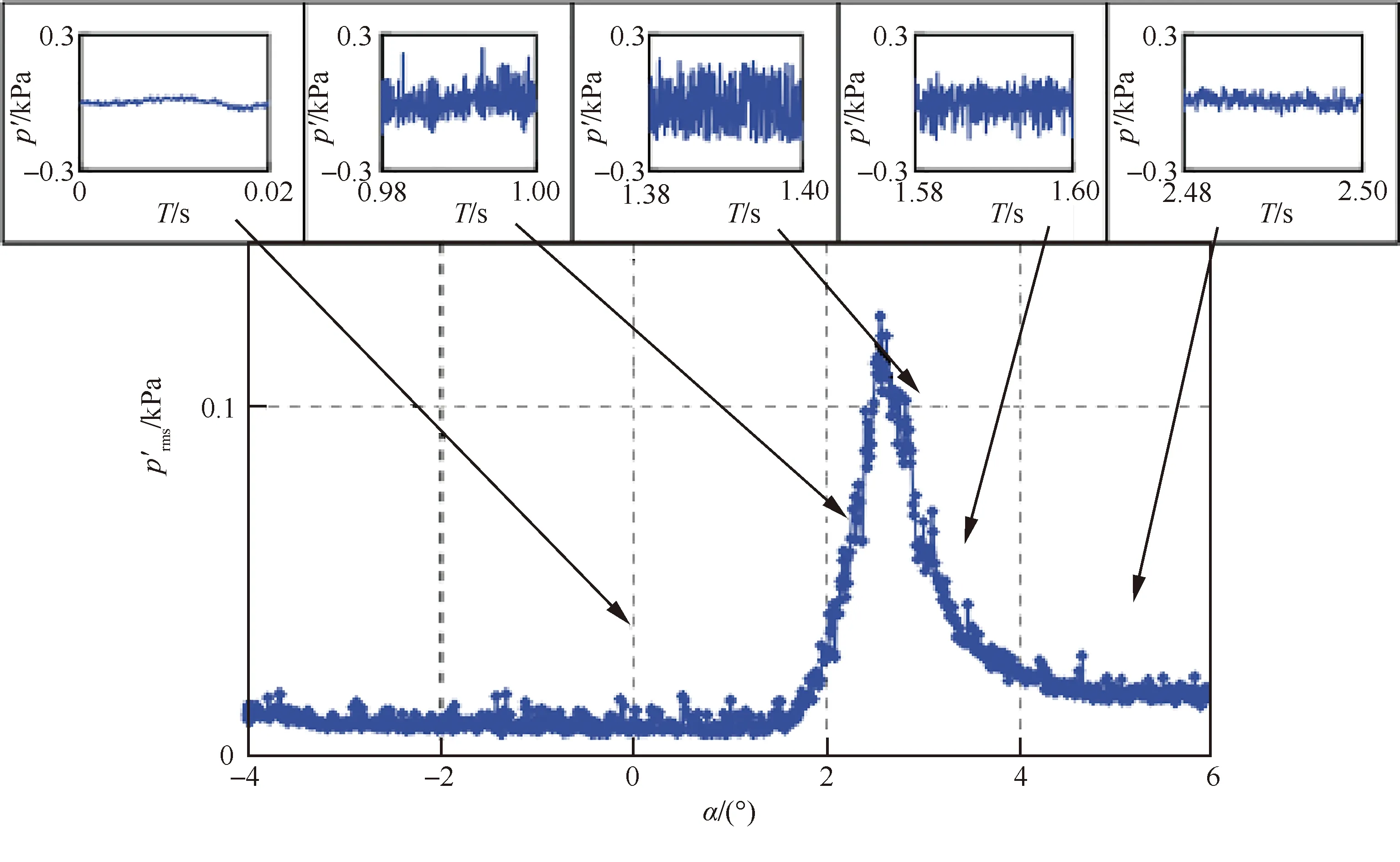
圖27 動(dòng)態(tài)壓力交流輸出隨迎角的變化[99]
紅外熱像技術(shù)和溫敏漆技術(shù)都是通過測(cè)量模型表面的溫度,然后根據(jù)層流區(qū)和湍流區(qū)因換熱效率不同產(chǎn)生的溫差來確定轉(zhuǎn)捩位置。紅外技術(shù)的優(yōu)勢(shì)在于其較高的溫度分辨率(約為0.02 K[100]),而TSP技術(shù)的溫度分辨率大約是0.1 K[101]。但在超聲速風(fēng)洞中,由于來流靜溫比較低,模型表面溫度會(huì)下降地非常快,因此如何維持來流與模型表面的溫度差就成為這兩種技術(shù)在超聲速風(fēng)洞中應(yīng)用的關(guān)鍵。目前一種有效的方法是使用電阻加熱涂層給模型表面均勻加熱[102]。通過在模型表面噴涂一層低厚度的電阻加熱涂層,然后通電加熱,實(shí)現(xiàn)模型與風(fēng)洞氣流之間人為制造的可自由調(diào)控的溫差。王猛等[103]將該方法應(yīng)用到超聲速流場(chǎng)的紅外熱像轉(zhuǎn)捩探測(cè)中,成功地捕捉了后掠機(jī)翼的橫流轉(zhuǎn)捩現(xiàn)象,如圖28所示,流動(dòng)從左往右,給出了典型后掠機(jī)翼馬赫數(shù)1.5條件下的轉(zhuǎn)捩圖像。
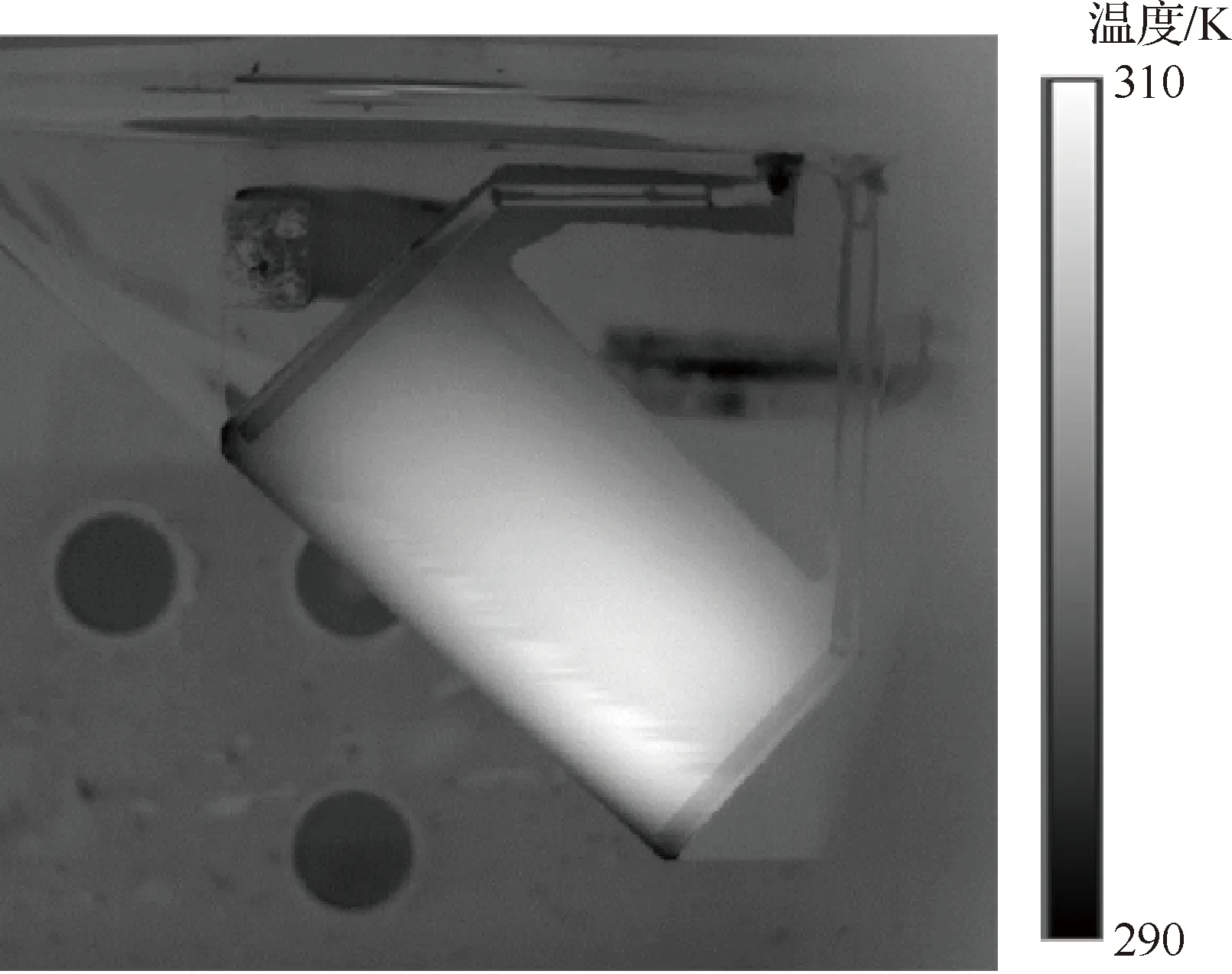
圖28 馬赫數(shù)1.5時(shí)的轉(zhuǎn)捩測(cè)量[103]
升華法則是利用化學(xué)升華物質(zhì)在層流區(qū)和湍流區(qū)升華速率的不同,當(dāng)湍流區(qū)涂層消失后層流區(qū)涂層仍然存在,從而確定轉(zhuǎn)捩位置。在低速和亞聲速領(lǐng)域,升華法已經(jīng)被廣泛地應(yīng)用[104]。但在超聲速流場(chǎng)中,存在著升華速率過快,涂層易被吹掉等困難。因此,必須尋找新化學(xué)升華品、溶劑以及配比。NASA的Owens等[25]使用芴(C13H10)作為升華物,Vertrel SDG(一種航空發(fā)動(dòng)機(jī)脫脂劑)作為溶劑,溶劑與升華物的比例選擇為65∶1(體積比),在超聲速風(fēng)洞中取得了很好的效果,如圖29所示。圖中:psia中1 psi=6.895 kPa,a表示絕對(duì)壓力。隨著雷諾數(shù)的增大,后掠翼的層流范圍明顯減小。并且當(dāng)雷諾數(shù)較大時(shí),觀察到了典型的鋸齒狀轉(zhuǎn)捩前沿,如圖29(c)、圖29(d)所示,說明駐波主導(dǎo)了轉(zhuǎn)捩。
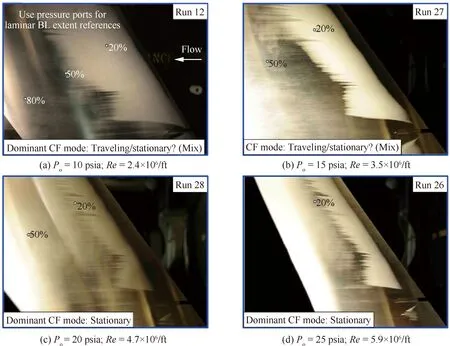
圖29 馬赫數(shù)2條件下不同雷諾數(shù)的轉(zhuǎn)捩測(cè)量[25]
3.2.3 模型表面質(zhì)量影響
層流保持效應(yīng)高度依賴于模型表面質(zhì)量。Radeztsky[105]、Saric[106-107]等的研究表明,橫流不穩(wěn)定性對(duì)表面粗糙度十分敏感,微米高度的粗糙元就足以增大橫流駐波的擾動(dòng)幅值,導(dǎo)致轉(zhuǎn)捩提前發(fā)生。在處理邊界層穩(wěn)定性時(shí),表面質(zhì)量通常表示為基于粗糙度高度的雷諾數(shù)Rekk:
(7)
式中:k是粗糙度高度;Uz=k和νz=k分別為距離壁面z=k處未擾動(dòng)邊界層的平均速度和運(yùn)動(dòng)黏度。Archambaud等[108]通過ONERA的馬赫數(shù)3.0風(fēng)洞試驗(yàn)給出了臨界N因子與Rekk的關(guān)系,即
NT=15.19-2.46×ln(Rekk)
(8)
圖30為Archambaud等[108]的實(shí)驗(yàn)結(jié)果。從圖中可以看出,對(duì)于尖前緣(LE)和鈍前緣的后掠機(jī)翼,隨著Rekk以對(duì)數(shù)標(biāo)度增大,臨界N因子呈線性減小,符合圖中虛線(即關(guān)系式)所表示的函數(shù)關(guān)系。
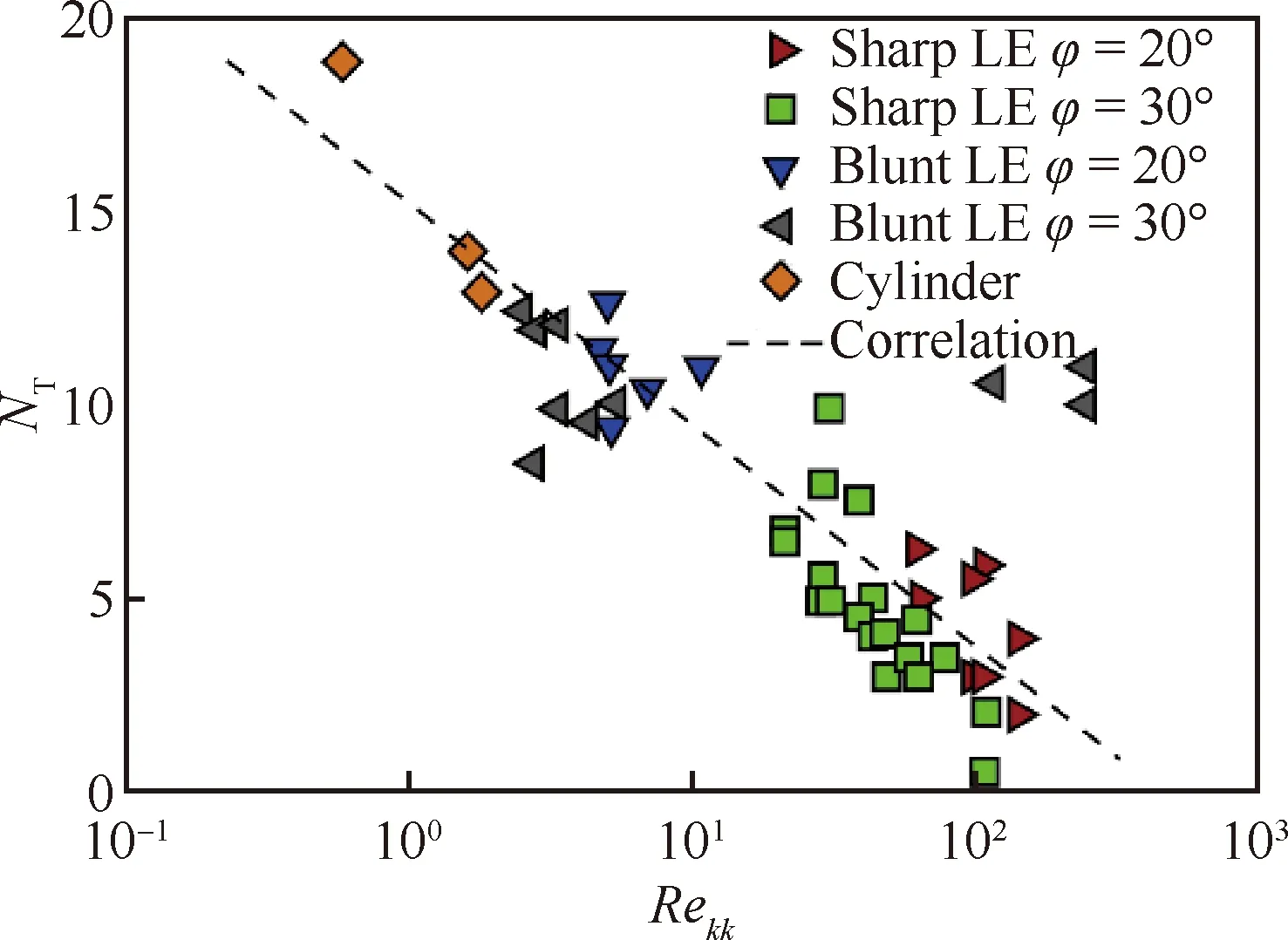
圖30 粗糙度雷諾數(shù)Rekk與定常橫流誘導(dǎo)的轉(zhuǎn)捩N因子的函數(shù)關(guān)系[108]
Mack公式建立了臨界N因子與湍流度水平的關(guān)系式。式(8)與之類似,主要反映的是表面粗糙度對(duì)橫流駐波不穩(wěn)定性的影響。
此外,實(shí)際模型還可能出現(xiàn)縫隙、臺(tái)階、螺釘?shù)缺砻嫒毕荨T诟呃字Z數(shù)下,物體的邊界層會(huì)很薄。這些表面缺陷的存在會(huì)給這些薄的邊界層帶來很大的擾動(dòng),不利于層流的保持。因此,為了確保層流性,風(fēng)洞模型或飛行試驗(yàn)?zāi)P捅仨氝M(jìn)行精心的打磨與拋光,以減少表面質(zhì)量對(duì)轉(zhuǎn)捩現(xiàn)象的影響。
3.2.4 雷諾數(shù)影響
超聲速風(fēng)洞受尺寸限制,實(shí)驗(yàn)雷諾數(shù)通常比飛行雷諾數(shù)小一個(gè)數(shù)量級(jí)以上。國外最大的超聲速風(fēng)洞為美國阿諾德工程發(fā)展中心(AEDC)的16S,試驗(yàn)段尺寸為4.88 m×4.88 m;國內(nèi)最大的超聲速風(fēng)洞為航空工業(yè)氣動(dòng)院的FL-62風(fēng)洞,試驗(yàn)段尺寸為2.4 m×2.4 m。然而這些風(fēng)洞都不足以模擬真實(shí)尺寸飛機(jī)的高雷諾數(shù)。因此,在風(fēng)洞中進(jìn)行轉(zhuǎn)捩實(shí)驗(yàn),需要考慮雷諾數(shù)影響。
JAXA根據(jù)NEXST-1飛行試驗(yàn)的轉(zhuǎn)捩數(shù)據(jù),總結(jié)了雷諾數(shù)對(duì)大后掠NLF機(jī)翼轉(zhuǎn)捩位置影響,如圖31所示[109]。當(dāng)雷諾數(shù)較低時(shí),前緣附近C-F波引起的N因子放大被抑制,T-S波引起的N因子放大占主導(dǎo),因此轉(zhuǎn)捩位置在機(jī)翼后部緩慢向前移動(dòng)(模式Ⅰ)。然而,隨著雷諾數(shù)的增加,C-F波引起的N因子也隨之增加。當(dāng)超過某一雷諾數(shù)閾值,轉(zhuǎn)捩迅速變成C-F波主導(dǎo),因此轉(zhuǎn)捩位置急劇移動(dòng)到前緣附近的區(qū)域(模式Ⅱ)。之后,隨著雷諾數(shù)的進(jìn)一步增大,轉(zhuǎn)捩位置不斷向前移動(dòng)(模式Ⅲ)。
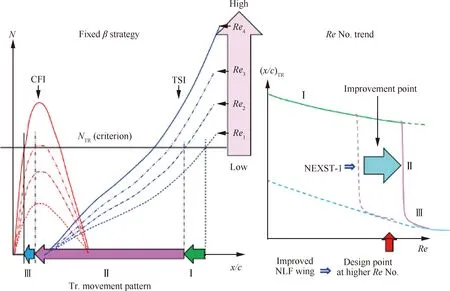
圖31 雷諾數(shù)對(duì)大后掠NLF機(jī)翼轉(zhuǎn)捩的影響[109]
3.3 飛行試驗(yàn)
飛行試驗(yàn)?zāi)軌蛟谡鎸?shí)飛行環(huán)境下進(jìn)行轉(zhuǎn)捩研究和層流評(píng)估,盡管其成本高、風(fēng)險(xiǎn)大,但仍然是不可或缺的研究手段。本小節(jié)將簡(jiǎn)單介紹飛行試驗(yàn)相對(duì)于風(fēng)洞試驗(yàn)的優(yōu)勢(shì)和自身技術(shù)難點(diǎn)。
3.3.1 飛行試驗(yàn)技術(shù)的優(yōu)勢(shì)
1) 復(fù)現(xiàn)高空低擾動(dòng)環(huán)境
3.2節(jié)介紹,超聲速邊界層轉(zhuǎn)捩對(duì)外界擾動(dòng)非常敏感,風(fēng)洞中較大的來流擾動(dòng)會(huì)使得轉(zhuǎn)捩提前發(fā)生。盡管國內(nèi)外相繼建設(shè)了靜音風(fēng)洞,但噴管口徑都較小,試驗(yàn)雷諾數(shù)遠(yuǎn)低于真實(shí)飛行雷諾數(shù),不足以模擬真實(shí)的轉(zhuǎn)捩現(xiàn)象。而飛行試驗(yàn)?zāi)軌蛲耆珡?fù)現(xiàn)高空低擾動(dòng)環(huán)境,得到真實(shí)的轉(zhuǎn)捩結(jié)果。
2) 高雷諾數(shù)條件模擬
超聲速風(fēng)洞尺寸有限,通常都是采用縮比模型進(jìn)行試驗(yàn),因此試驗(yàn)雷諾數(shù)要遠(yuǎn)小于真實(shí)尺寸飛機(jī)的雷諾數(shù)。而飛行試驗(yàn)?zāi)軌蚴褂么蟪叽缟踔寥叽缒P停M真實(shí)飛機(jī)的高雷諾數(shù)條件。
3.3.2 飛行試驗(yàn)技術(shù)的難點(diǎn)
1) 精細(xì)化測(cè)量困難
與風(fēng)洞試驗(yàn)相比,飛行試驗(yàn)測(cè)量技術(shù)較少,測(cè)量數(shù)據(jù)有限,且精度偏低。對(duì)于超聲速轉(zhuǎn)捩研究,飛行試驗(yàn)通常只能測(cè)量轉(zhuǎn)捩位置,很難獲取邊界層的擾動(dòng)信息,不足以支撐轉(zhuǎn)捩機(jī)理等方面的研究。
2) 重復(fù)性較差
由于飛行試驗(yàn)牽涉面廣,并且受大氣條件影響,一般很難重復(fù)相同的飛行條件,因此數(shù)據(jù)重復(fù)性不高。美國航天飛機(jī)的數(shù)據(jù)表明,即使同一架飛行器在相同彈道多次飛行,轉(zhuǎn)捩雷諾數(shù)也會(huì)出現(xiàn)比較大的變化[110]。
3.3.3 天地一致性問題
飛行試驗(yàn)是對(duì)設(shè)計(jì)及預(yù)測(cè)評(píng)估方法的綜合檢驗(yàn),如上所述的飛行試驗(yàn)優(yōu)缺點(diǎn)會(huì)造成風(fēng)洞與飛行試驗(yàn)之間的空氣動(dòng)力學(xué)性能差異、環(huán)境差異以及幾何模擬上的差異。風(fēng)洞試驗(yàn)結(jié)果以及評(píng)估方法不能直接與飛行結(jié)果對(duì)比,需要經(jīng)過多種修正。正確的利用飛行數(shù)據(jù)評(píng)價(jià)設(shè)計(jì)與預(yù)測(cè)手段是飛行試驗(yàn)技術(shù)關(guān)鍵。
在超聲速轉(zhuǎn)捩試驗(yàn)領(lǐng)域,由于目前數(shù)據(jù)積累并不像亞聲速那樣豐富,特別是針對(duì)機(jī)翼這樣的復(fù)雜構(gòu)型,數(shù)據(jù)積累就更少,故而有關(guān)試驗(yàn)數(shù)據(jù)的天地一致性問題并未有明確的結(jié)論,還需進(jìn)一步的研究和探討。
4 典型超聲速層流布局設(shè)計(jì)與評(píng)估案例
4.1 NASA設(shè)計(jì)案例
NASA開展了自然層流機(jī)翼(NLF)設(shè)計(jì)的研究,最開始是將該技術(shù)應(yīng)用于商用跨聲速運(yùn)輸機(jī)的層流布局設(shè)計(jì)中[111],之后又將其成功擴(kuò)展到超聲速構(gòu)型[112]。該NLF分析和設(shè)計(jì)方法包括一個(gè)流動(dòng)求解器、網(wǎng)格操作工具、一個(gè)設(shè)計(jì)模塊和轉(zhuǎn)捩預(yù)測(cè)軟件,如圖32所示[112]。
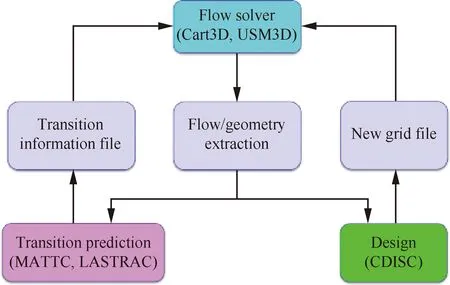
圖32 NLF分析和設(shè)計(jì)框架流程圖[112]
在超聲速層流布局設(shè)計(jì)中,其將目標(biāo)壓力分布分為4個(gè)區(qū)域,如圖33所示[112]。流動(dòng)從前緣至x1處快速加速,隨后經(jīng)歷零壓力梯度的短區(qū)域至x2,這是在大后掠角和高雷諾數(shù)的機(jī)翼上抑制CF波增長的關(guān)鍵特征。x2和x3之間的壓力梯度通過CDISC中一個(gè)通用阻尼函數(shù)(UDF)來確定,用于控制T-S波的增長。x3代表了所需的層流范圍。
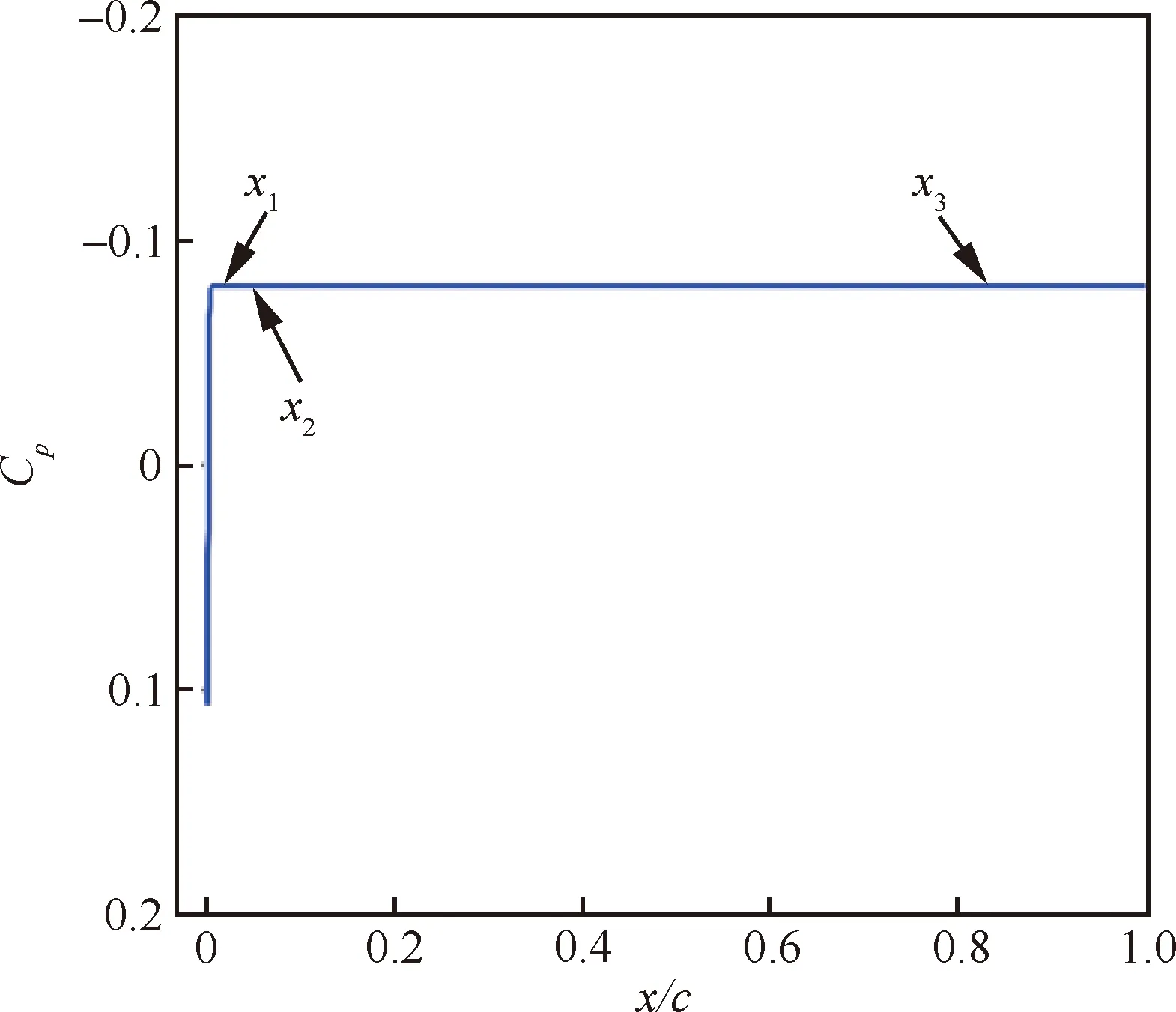
圖33 顯示x1、x2、x3相對(duì)位置的NLF目標(biāo)上表面的Cp分布[112]
NASA利用上述方法,對(duì)超聲速運(yùn)輸機(jī)構(gòu)型(NJWB構(gòu)型,如圖34所示[112])進(jìn)行了NLF設(shè)計(jì)與評(píng)估。設(shè)計(jì)點(diǎn)的巡航馬赫數(shù)為1.6,迎角為3°,升力系數(shù)為0.1,單位雷諾數(shù)為190×104/ft。選取站位3和站位8(黃色線)用于展示設(shè)計(jì)優(yōu)化后的結(jié)果。圖35、圖36分別顯示了站位3和站位8的壓力分布和翼型幾何形狀。從圖中可以看出,目標(biāo)壓力與設(shè)計(jì)壓力幾乎相同。
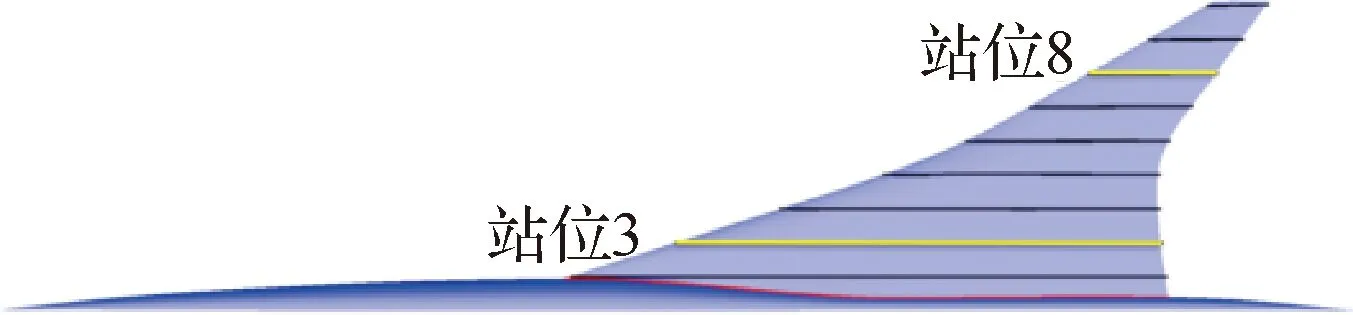
圖34 NJWB構(gòu)型的設(shè)計(jì)站位[112]
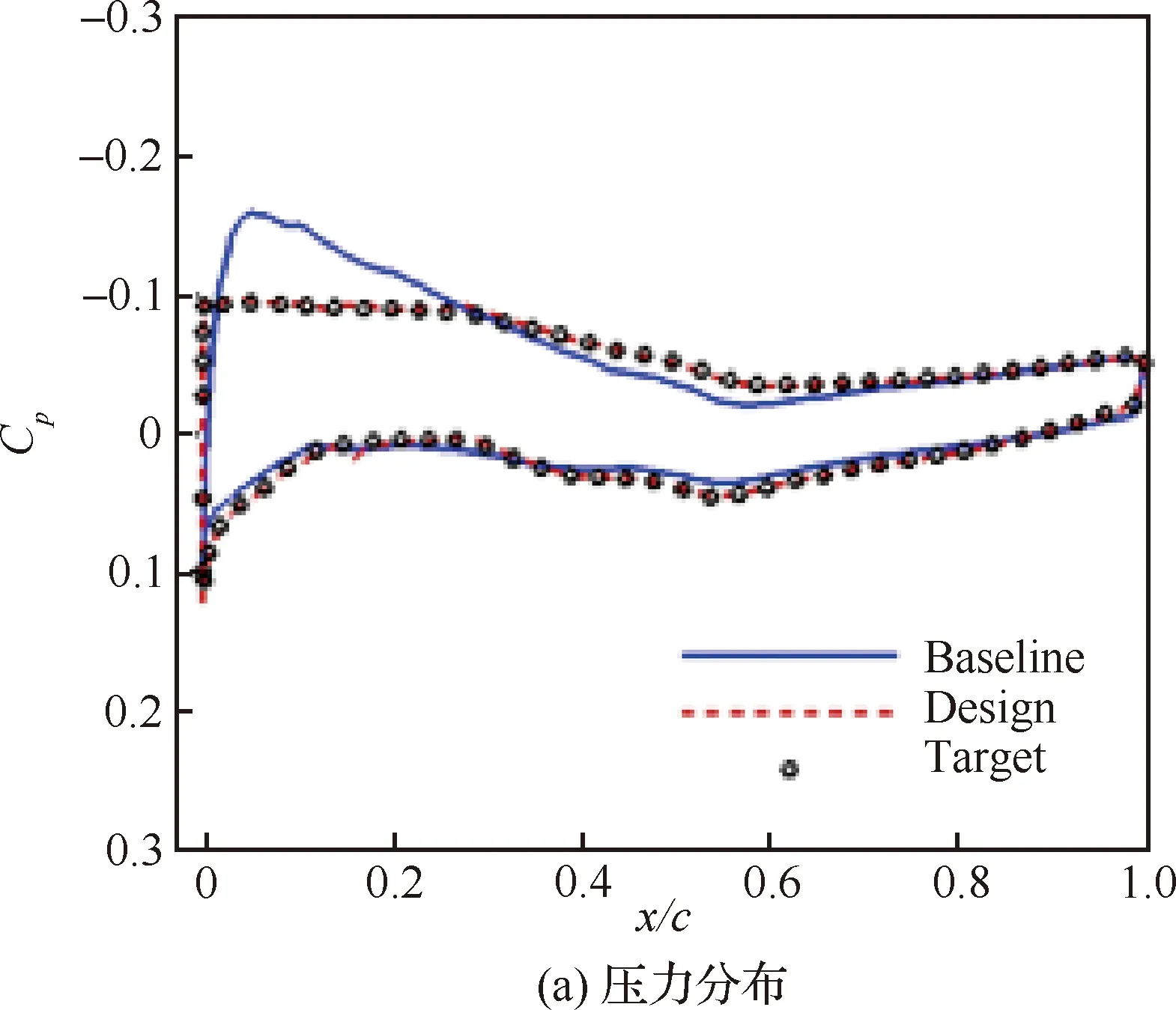
圖35 站位3的結(jié)果[112]
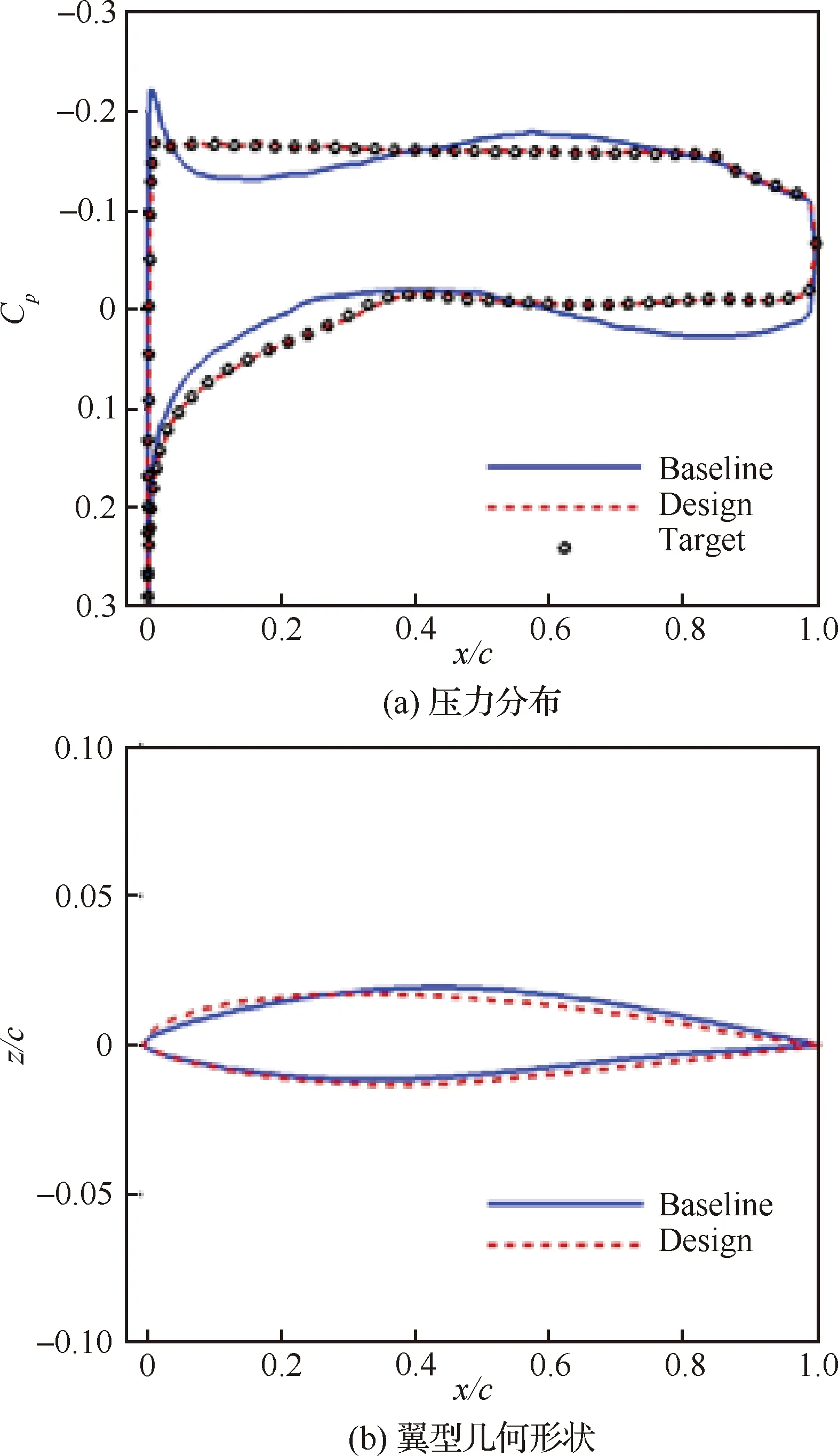
圖36 站位8的結(jié)果[112]
NASA采用eN方法評(píng)估了多個(gè)展向站位的轉(zhuǎn)捩位置,在各站位之間進(jìn)行插值,計(jì)算得到圖37 所示的轉(zhuǎn)捩線,其中層流面積約占機(jī)翼上表面面積的44%。NASA還給出了非設(shè)計(jì)點(diǎn)下的轉(zhuǎn)捩特性,如圖38所示,在巡航條件附近,當(dāng)迎角減小時(shí)(升力系數(shù)為0.09),層流區(qū)面積減小為19%;當(dāng)迎角增大時(shí)(升力系數(shù)為0.11),層流區(qū)面積減小為31%。
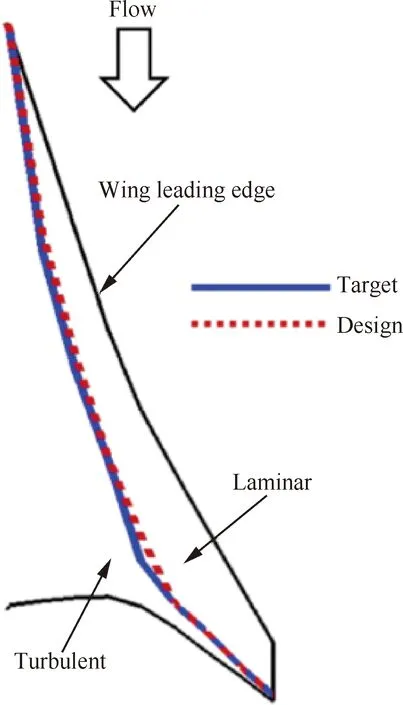
圖37 機(jī)翼表面的目標(biāo)轉(zhuǎn)捩前沿和設(shè)計(jì)轉(zhuǎn)捩前沿[112]
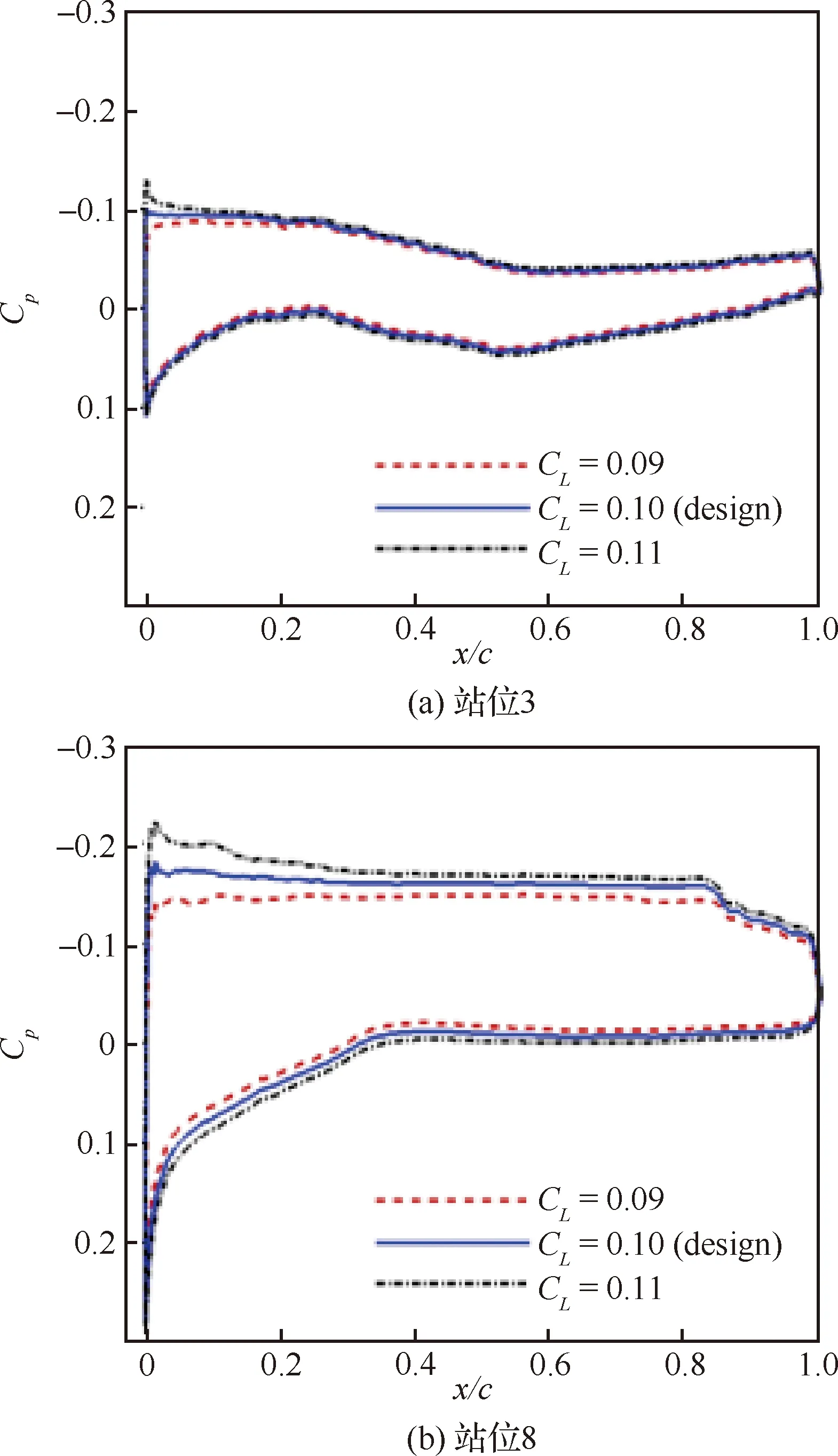
圖38 站位3和站位8接近巡航狀態(tài)下的壓力分布[112]
4.2 JAXA設(shè)計(jì)案例
JAXA(日本宇宙航空研究院)一直致力于下一代超聲速民機(jī)的設(shè)計(jì)與研發(fā)技術(shù)探索。在NEXST計(jì)劃中[5],JAXA設(shè)計(jì)了名為“NEXST-1”的無動(dòng)力試驗(yàn)飛機(jī),用以驗(yàn)證JAXA的超聲速創(chuàng)新減阻概念。
JAXA將NEXST-1飛機(jī)的氣動(dòng)設(shè)計(jì)分為兩個(gè)階段。在第1階段,為了降低壓阻,采用了基于超聲速線性理論的箭頭平面形狀、翹曲機(jī)翼、面積律機(jī)體的設(shè)計(jì)方案;在第2階段,開發(fā)了具有亞聲速前緣的自然層流機(jī)翼(NLF)設(shè)計(jì)概念,以擴(kuò)大機(jī)翼表面的層流范圍。NEXST-1飛機(jī)的氣動(dòng)設(shè)計(jì)概念和構(gòu)型如圖39所示[113]。
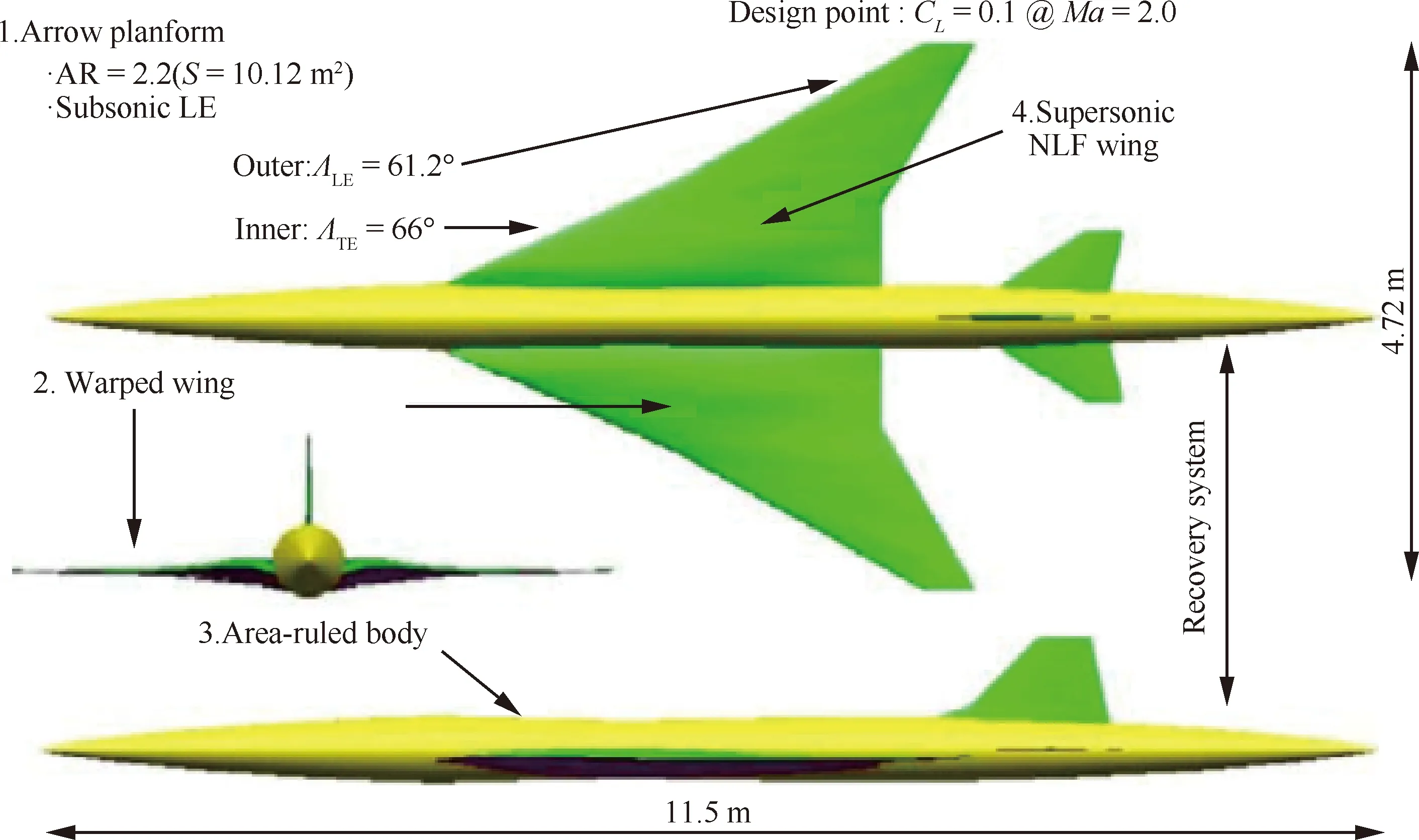
圖39 NEXST-1飛機(jī)的氣動(dòng)設(shè)計(jì)概念和構(gòu)型[113]
在NLF設(shè)計(jì)中,JAXA開發(fā)了基于計(jì)算流體力學(xué)(CFD)的反設(shè)計(jì)方法,如圖40所示。這種方法在每次迭代時(shí)可以計(jì)算整個(gè)構(gòu)型(機(jī)翼-機(jī)身-尾翼)周圍的流場(chǎng),并對(duì)機(jī)翼進(jìn)行單獨(dú)修改。迭代過程由以下步驟組成:① 使用CFD解算器來計(jì)算機(jī)翼表面的壓力分布;② 計(jì)算壓力分布和目標(biāo)壓力分布之間的壓力差;③ 使用反設(shè)計(jì)方法導(dǎo)出所需的幾何形狀;④ 對(duì)展向站位的機(jī)翼剖面幾何形狀進(jìn)行修正;⑤ 采用“CATIA”軟件對(duì)包含原始機(jī)身和機(jī)翼的構(gòu)型進(jìn)行處理。圖41[113]顯示了最終迭代計(jì)算的壓力分布與目標(biāo)壓力分布的比較結(jié)果,一致性很好。
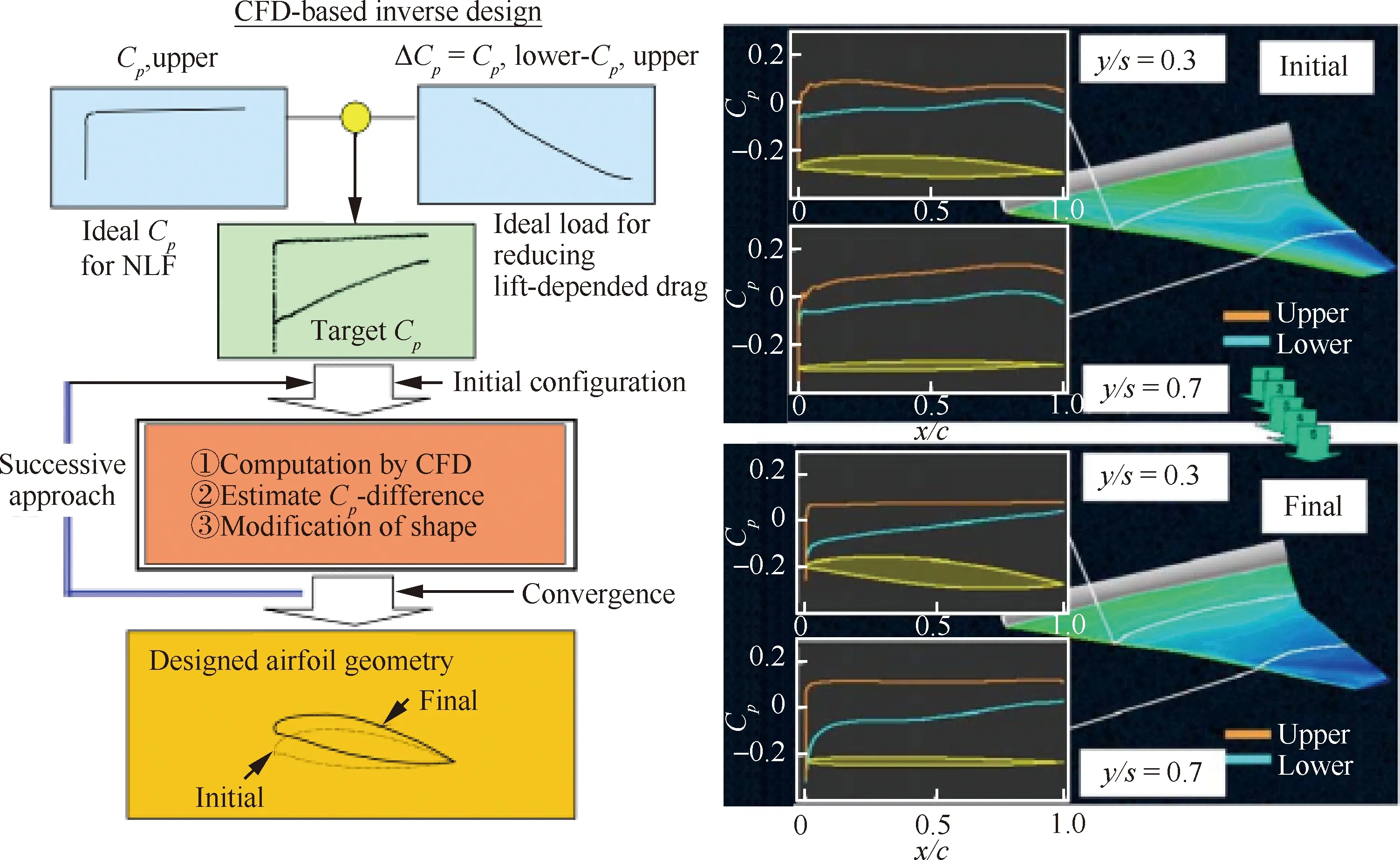
圖40 基于CFD的反設(shè)計(jì)方法的設(shè)計(jì)流程[113]
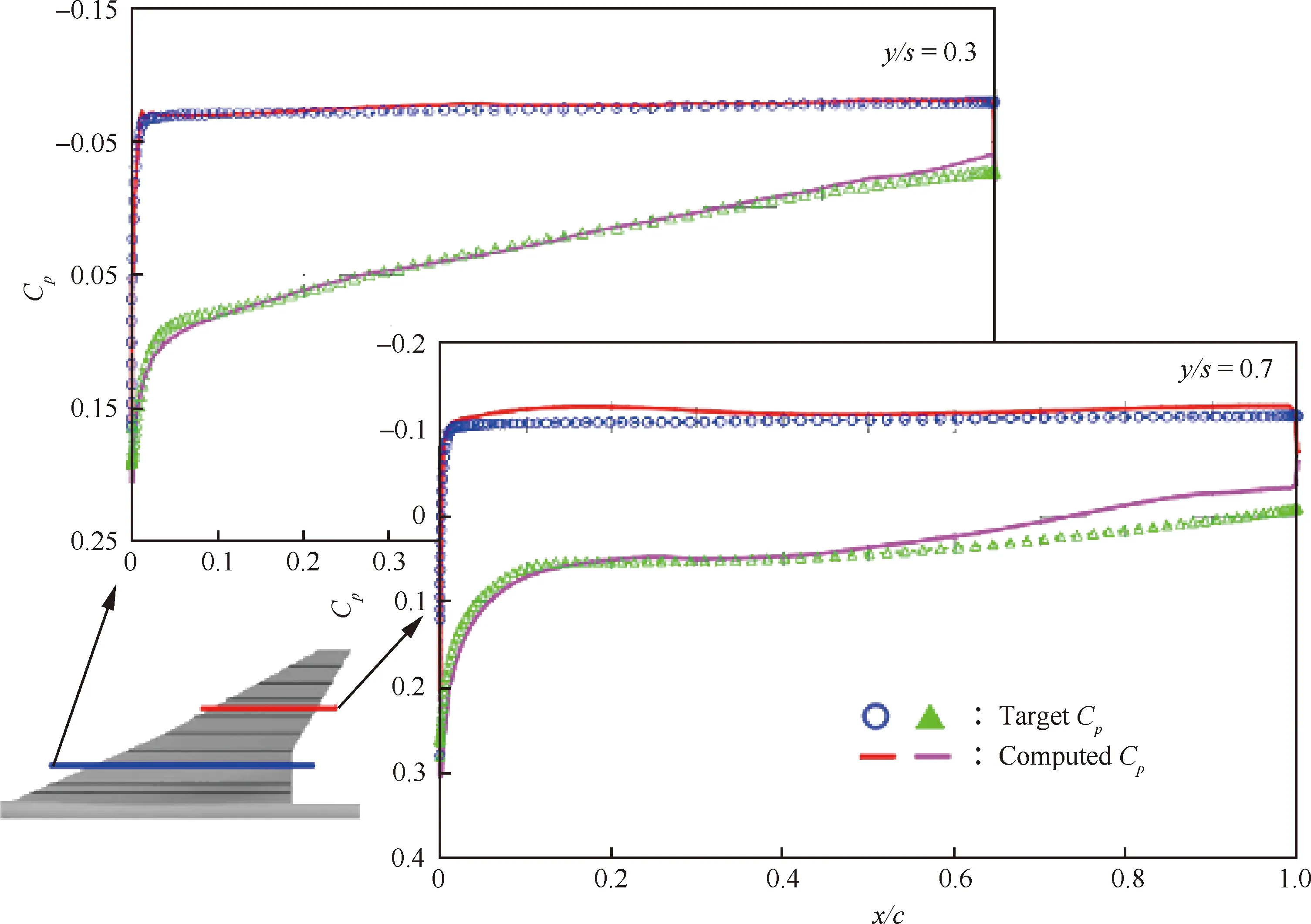
圖41 反設(shè)計(jì)方法得到的Cp分布的最終結(jié)果[113]
為了驗(yàn)證NLF機(jī)翼設(shè)計(jì)概念的效果,JAXA進(jìn)行了風(fēng)洞試驗(yàn)和飛行試驗(yàn)。圖42[113]將CFD分析結(jié)果與兩個(gè)風(fēng)洞測(cè)得的結(jié)果進(jìn)行了比較,可以看出對(duì)比結(jié)果吻合的較好。通過紅外成像技術(shù)檢測(cè)轉(zhuǎn)捩位置,結(jié)果定性地證實(shí)了在設(shè)計(jì)點(diǎn)下轉(zhuǎn)捩位置向后移動(dòng),如圖43所示[113]。
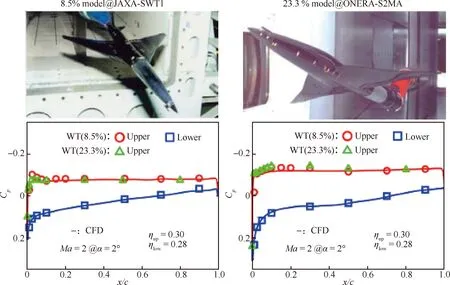
圖42 壓力分布的實(shí)驗(yàn)驗(yàn)證[113]
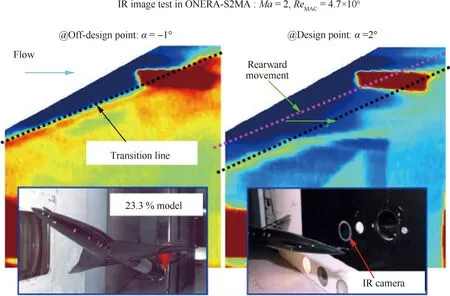
圖43 轉(zhuǎn)捩特性的實(shí)驗(yàn)驗(yàn)證[113]
圖44[113]為飛行試驗(yàn)結(jié)果與CFD分析結(jié)果的機(jī)翼壓力分布對(duì)比圖,可以看出在上表面壓力分布吻合的很好,在下表面試驗(yàn)與計(jì)算結(jié)果有略微的差異。但在總體上對(duì)比結(jié)果的一致性較好,說明NLF機(jī)翼的設(shè)計(jì)滿足了飛行試驗(yàn)的條件。圖45顯示了飛行試驗(yàn)轉(zhuǎn)捩位置的測(cè)量結(jié)果,可以看出在設(shè)計(jì)工況下(CL=0.1)的轉(zhuǎn)捩位置是向后移動(dòng)最大的,層流區(qū)域面積也是最大的,進(jìn)一步表明飛行試驗(yàn)結(jié)果驗(yàn)證了NLF機(jī)翼設(shè)計(jì)理念的有效性。
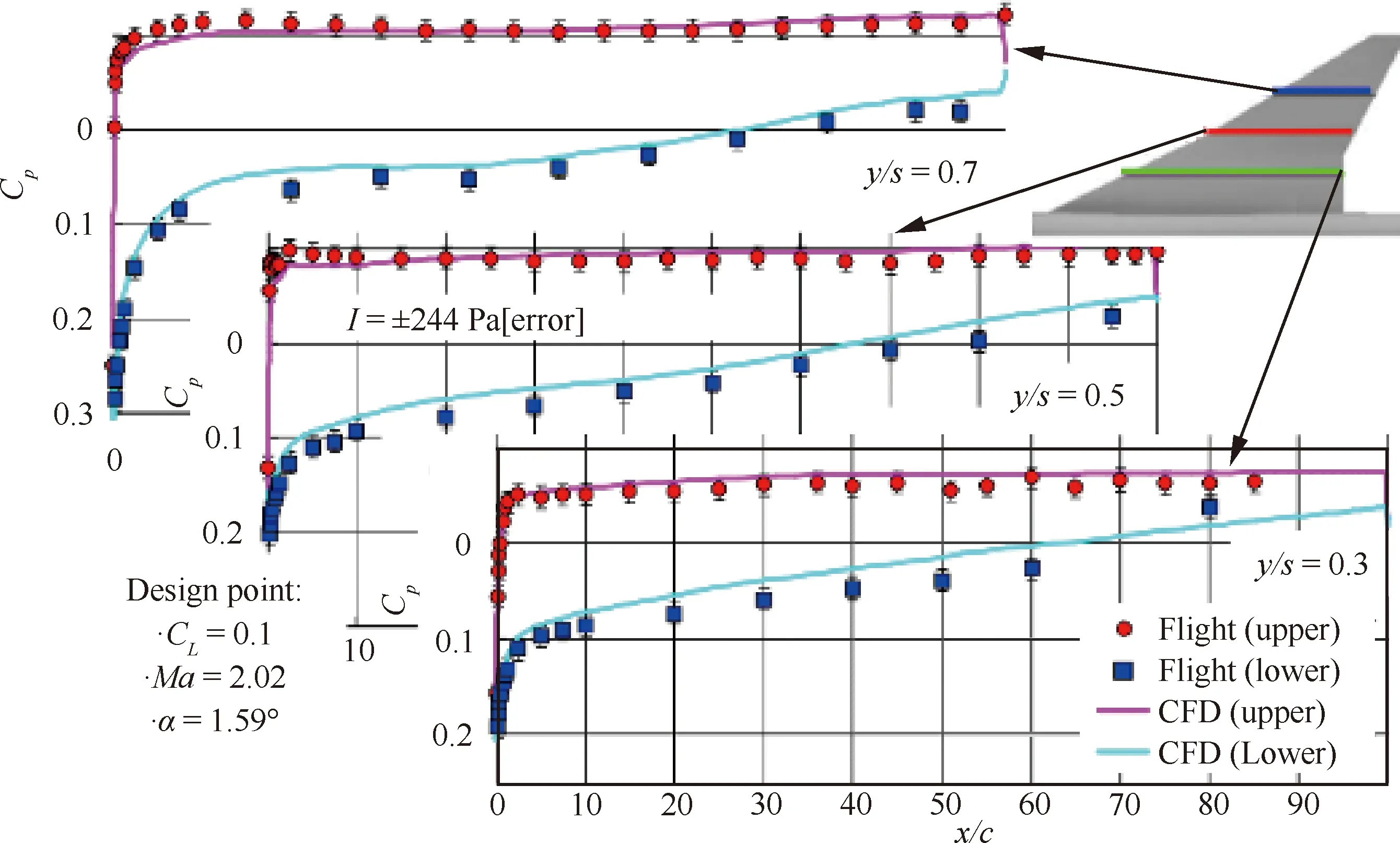
圖44 飛行試驗(yàn)結(jié)果:機(jī)翼壓力分布[113]
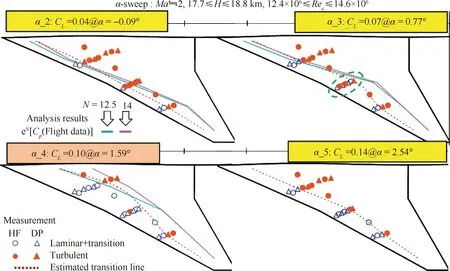
圖45 飛行試驗(yàn)結(jié)果:轉(zhuǎn)捩位置測(cè)量[113]
盡管NLF機(jī)翼設(shè)計(jì)在縮比的飛機(jī)模型上得到驗(yàn)證,但當(dāng)雷諾數(shù)進(jìn)一步增大時(shí),層流效應(yīng)顯著減小,因此前期發(fā)展的設(shè)計(jì)方法在全尺寸飛機(jī)的高雷諾數(shù)下并不完全有效。為了改善這種情況,應(yīng)該把主要工作放在抑制前緣附近的橫流不穩(wěn)定性上,因?yàn)殡S著雷諾數(shù)的增加,由橫流引起的不穩(wěn)定性變得更強(qiáng)。
抑制橫流不穩(wěn)定性的主要手段是縮短橫流區(qū)域或減小橫流強(qiáng)度。從設(shè)計(jì)具有有限前緣半徑的真實(shí)機(jī)翼的角度來看,極其短的加速區(qū)域是難以實(shí)現(xiàn)的,甚至是不可能的,所以減小橫流強(qiáng)度是另一種可能的選擇。JAXA通過對(duì)NEXST-1機(jī)翼邊界層的計(jì)算發(fā)現(xiàn),反轉(zhuǎn)橫流速度的方向能夠降低橫流速度的絕對(duì)值,從而減小橫流強(qiáng)度,抑制由橫流不穩(wěn)定性引起的N因子的放大[114]。
基于反轉(zhuǎn)橫流速度方向的設(shè)計(jì)思想,JAXA[109]提出了一個(gè)新的理想壓力分布,如圖46所示。首先,靠近前緣的加速區(qū)必須盡可能地短;然后,在陡峭的加速區(qū)后形成相對(duì)長一些的陡峭的減速區(qū);最后,在減速區(qū)后形成一個(gè)緩慢加速的區(qū)域直至后緣。該壓力分布可由一個(gè)函數(shù)表達(dá)式來描述,圖中A0為前緣的Cp,A1為吸力峰的Cp,A2為減速區(qū)的最小Cp,A3為前緣附近典型弦向位置(比如x/c=0.05)的Cp,A4為A3位置到后緣Cp的梯度,B1為前緣加速區(qū)的加速梯度,B2急劇加速后的減速梯度,B3為減速之后的再加速梯度,P1是調(diào)整B3再加速起點(diǎn)的參數(shù),P2是確定B3之后的Cp梯度。
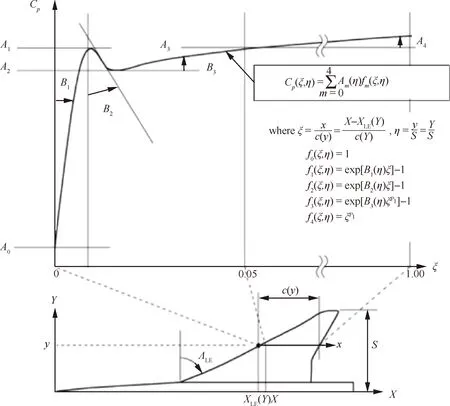
圖46 高雷諾數(shù)條件下NLF機(jī)翼設(shè)計(jì)新的理想壓力分布的函數(shù)表達(dá)式[109]
JAXA通過分析調(diào)整確定了新的理想壓力分布的最佳系數(shù)組合,如表2[109]和圖47[109]所示。圖48[109]給出了橫流速度在前緣附近從負(fù)側(cè)(內(nèi)翼方向)向正側(cè)(外翼方向)的變化,橫流速度的絕對(duì)值在x/c≤0.3之前被限制在較小的值,之后才變大。圖49[109]給出了N=12.5,14兩個(gè)轉(zhuǎn)捩標(biāo)準(zhǔn)下預(yù)估的轉(zhuǎn)捩位置。相較于先前的NEXST-1,在高雷諾數(shù)下有顯著的改進(jìn)。
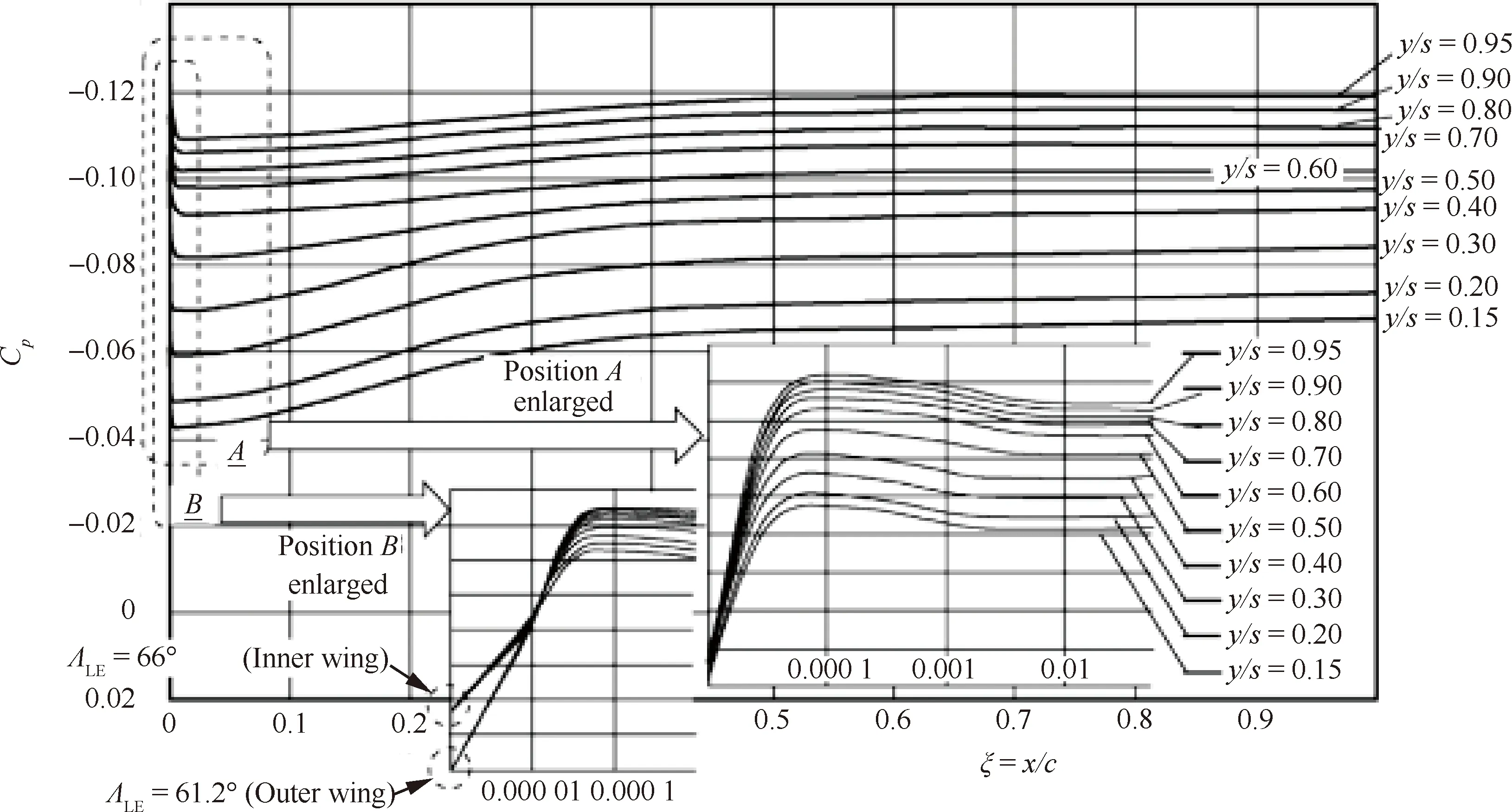
圖47 高雷諾數(shù)條件下NLF機(jī)翼設(shè)計(jì)的新理想壓力分布[109]
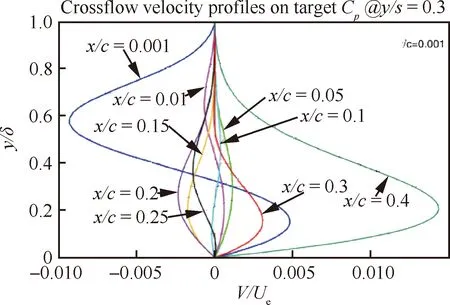
圖48 高雷諾數(shù)下根據(jù)新的理想壓力分布計(jì)算的橫流速度剖面[109]
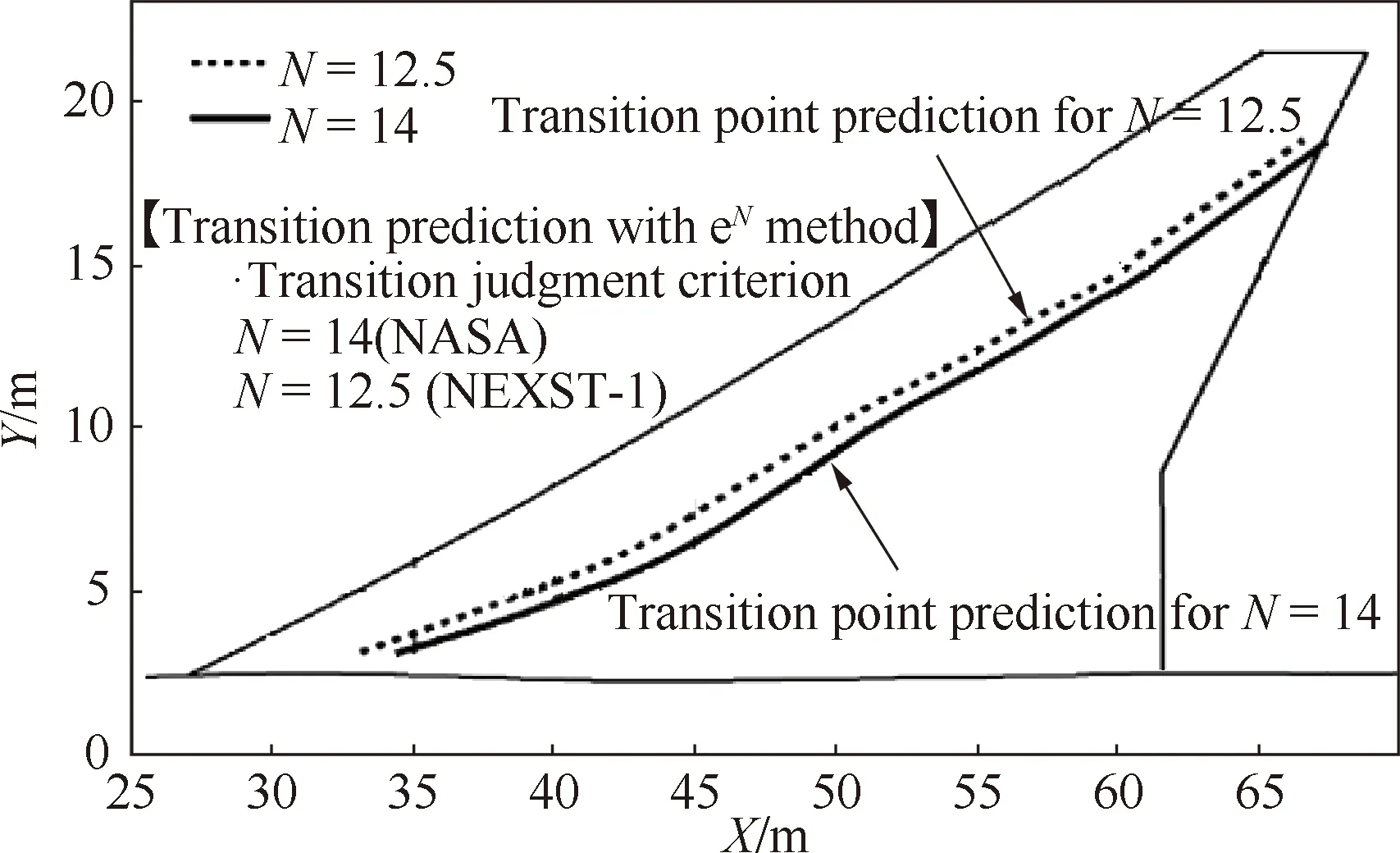
圖49 高雷諾數(shù)條件下新的理想壓力分布的轉(zhuǎn)捩分析[109]
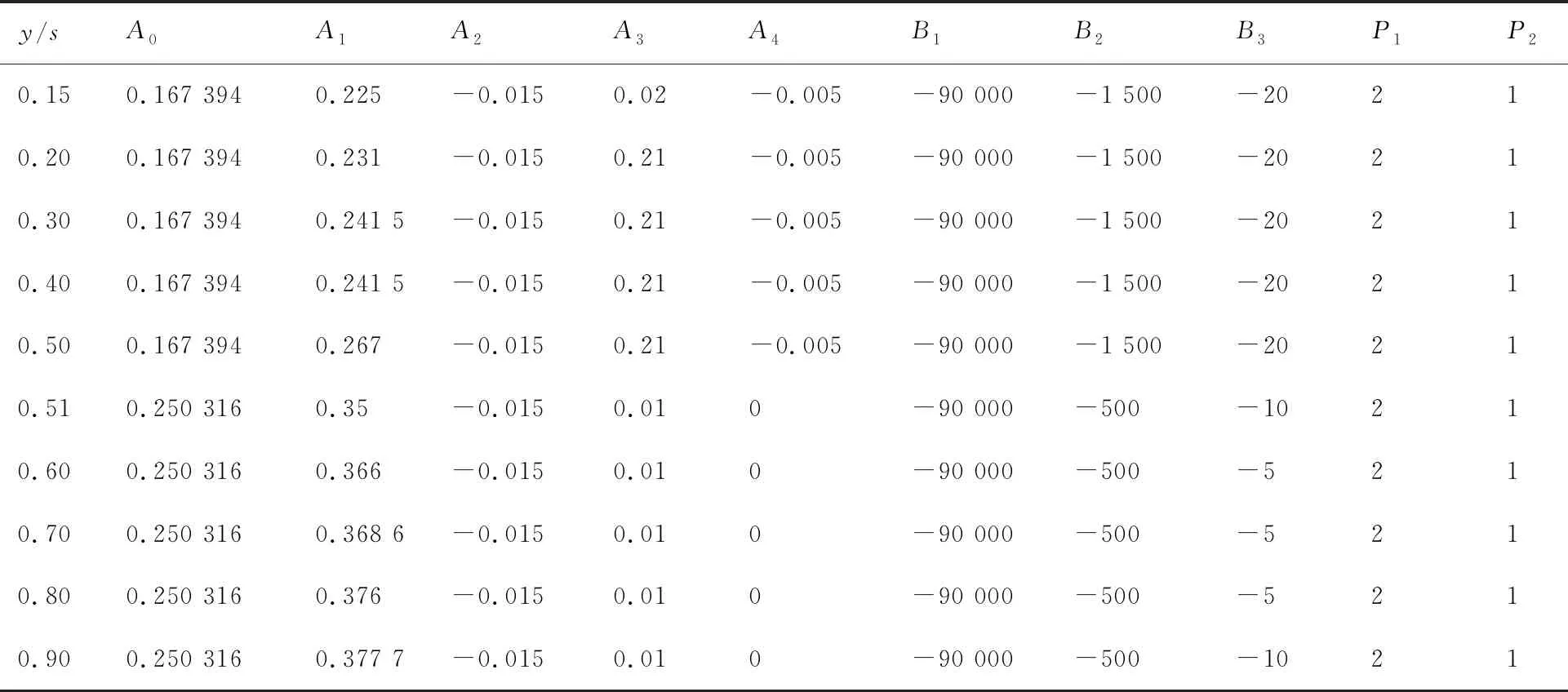
表2 新的理想壓力分布最佳系數(shù)組合[109]
4.3 法國ONERA和意大利CIRA的聯(lián)合設(shè)計(jì)案例
ONERA(法國航空航天研究院)與CIRA(意大利航空航天研究中心)在歐盟的SUPERTRAC項(xiàng)目[115]里聯(lián)合開展了關(guān)于超聲速商用噴氣布局大后掠角NLF機(jī)翼的氣動(dòng)外形優(yōu)化的研究工作。基本構(gòu)型由達(dá)索航空公司提供,如圖50所示[116-117]。內(nèi)側(cè)機(jī)翼的前緣后掠角為65°,外側(cè)機(jī)翼的前緣后掠角為56°,機(jī)翼半翼展為9.35 m,展弦比為3.5,巡航飛行馬赫數(shù)為1.6。
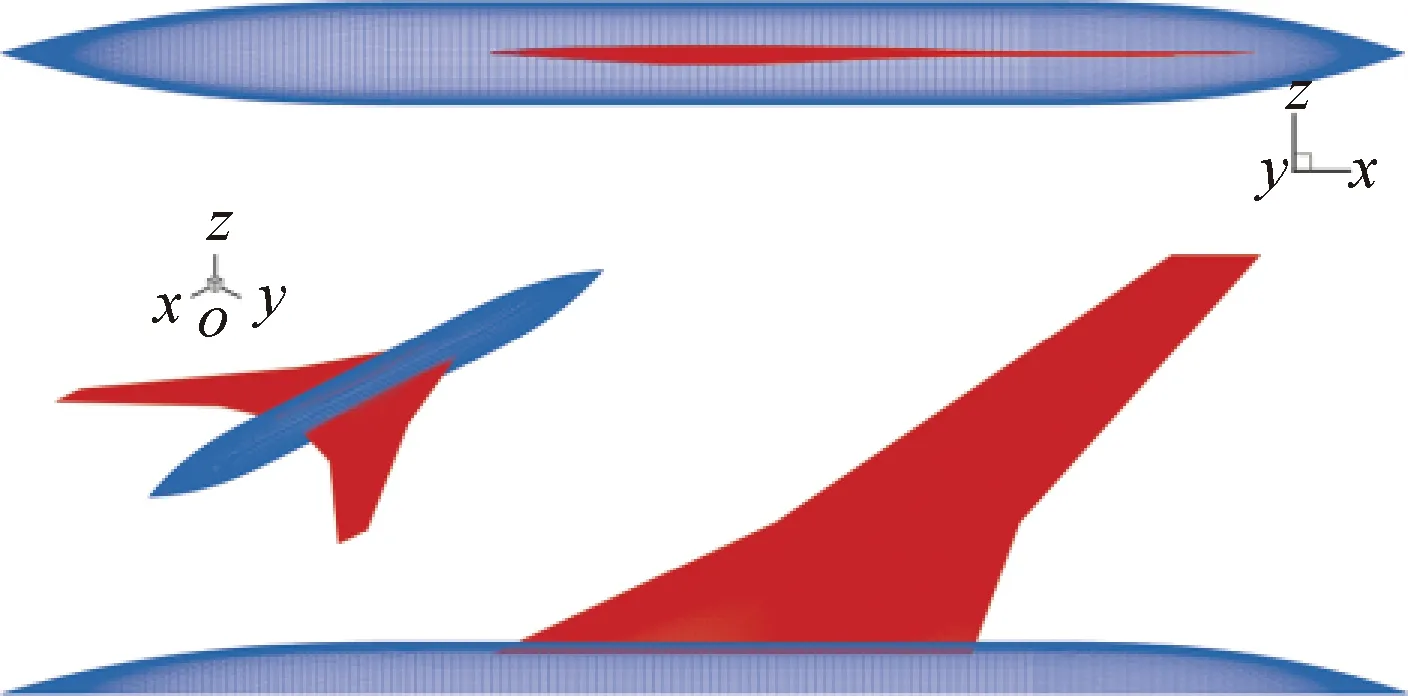
圖50 基本模型的幾何形狀[116-117]
CIRA和ONERA分別采用全局優(yōu)化和局部?jī)?yōu)化的策略開展NLF的氣動(dòng)優(yōu)化研究。全局優(yōu)化方法的優(yōu)點(diǎn)是可讓整個(gè)形狀根據(jù)沿機(jī)翼的氣動(dòng)條件的變化而變化,有更大的靈活性,可在滿足總升力、阻力和俯仰力矩系數(shù)的氣動(dòng)約束的同時(shí),優(yōu)化自然層流特性。局部?jī)?yōu)化方法側(cè)重于機(jī)翼前緣周圍的局部形狀修改,根據(jù)前人的設(shè)計(jì)經(jīng)驗(yàn),這一區(qū)域的形狀變化更有可能在流場(chǎng)中引入不同的流動(dòng)特性。具體的優(yōu)化過程如圖51所示[117]。
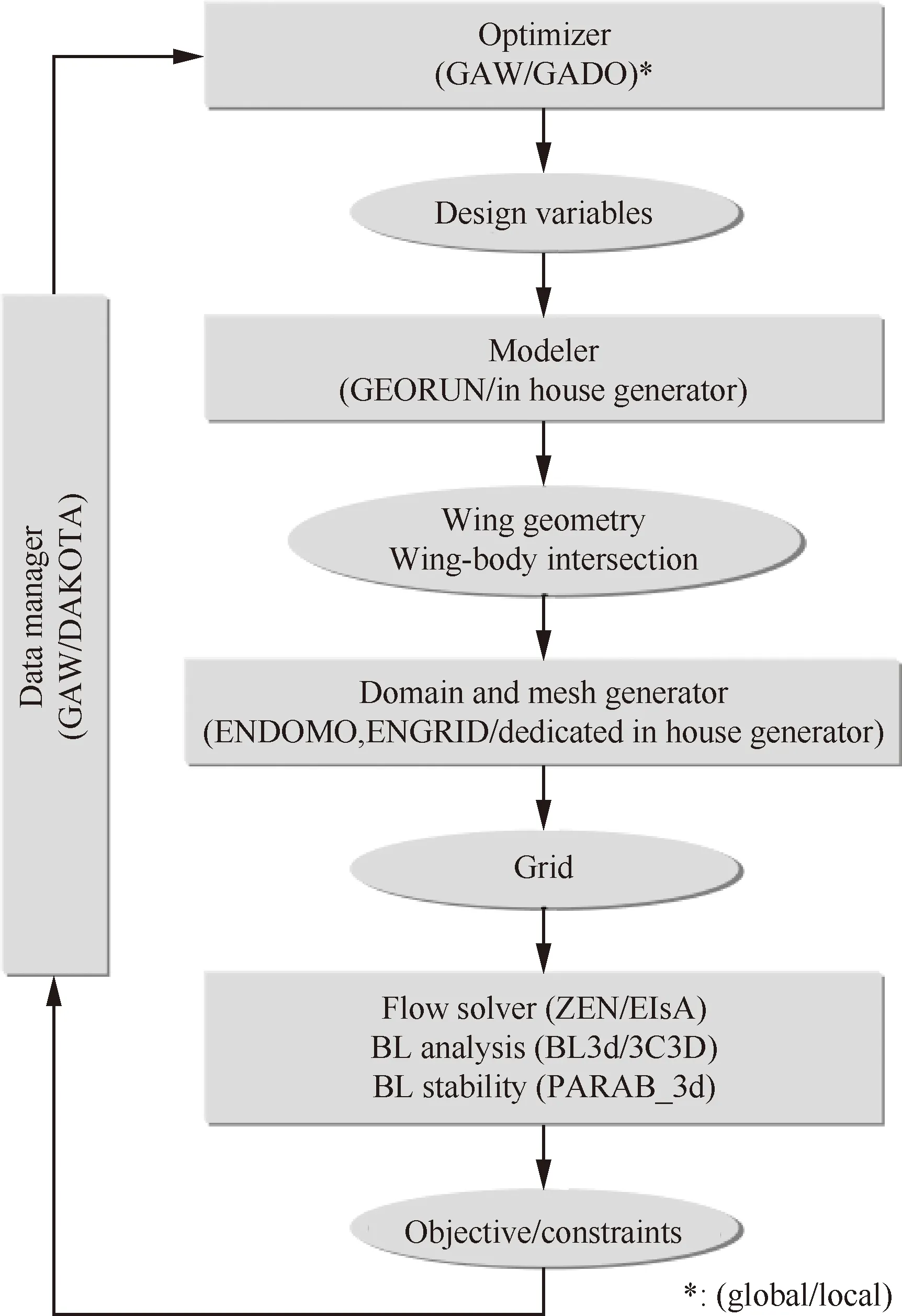
圖51 機(jī)翼設(shè)計(jì)鏈[117]
CIRA全局優(yōu)化的結(jié)果如圖52[117]和圖53[117]所示。從壓力分布看,外翼Sec=20截面的壓力分布更接近于NLF機(jī)翼的理想壓力分布;N因子等值線圖也證實(shí)了,外翼Sec=20截面的層流效應(yīng)優(yōu)于其他截面。機(jī)翼表面的壓力分布狀況影響著從層流到湍流的轉(zhuǎn)捩過程,采用全局優(yōu)化的方案,通過對(duì)機(jī)翼剖面形狀的修改,抑制了邊界層內(nèi)擾動(dòng)的增長,實(shí)現(xiàn)了自然層流區(qū)域最大化的目標(biāo)。
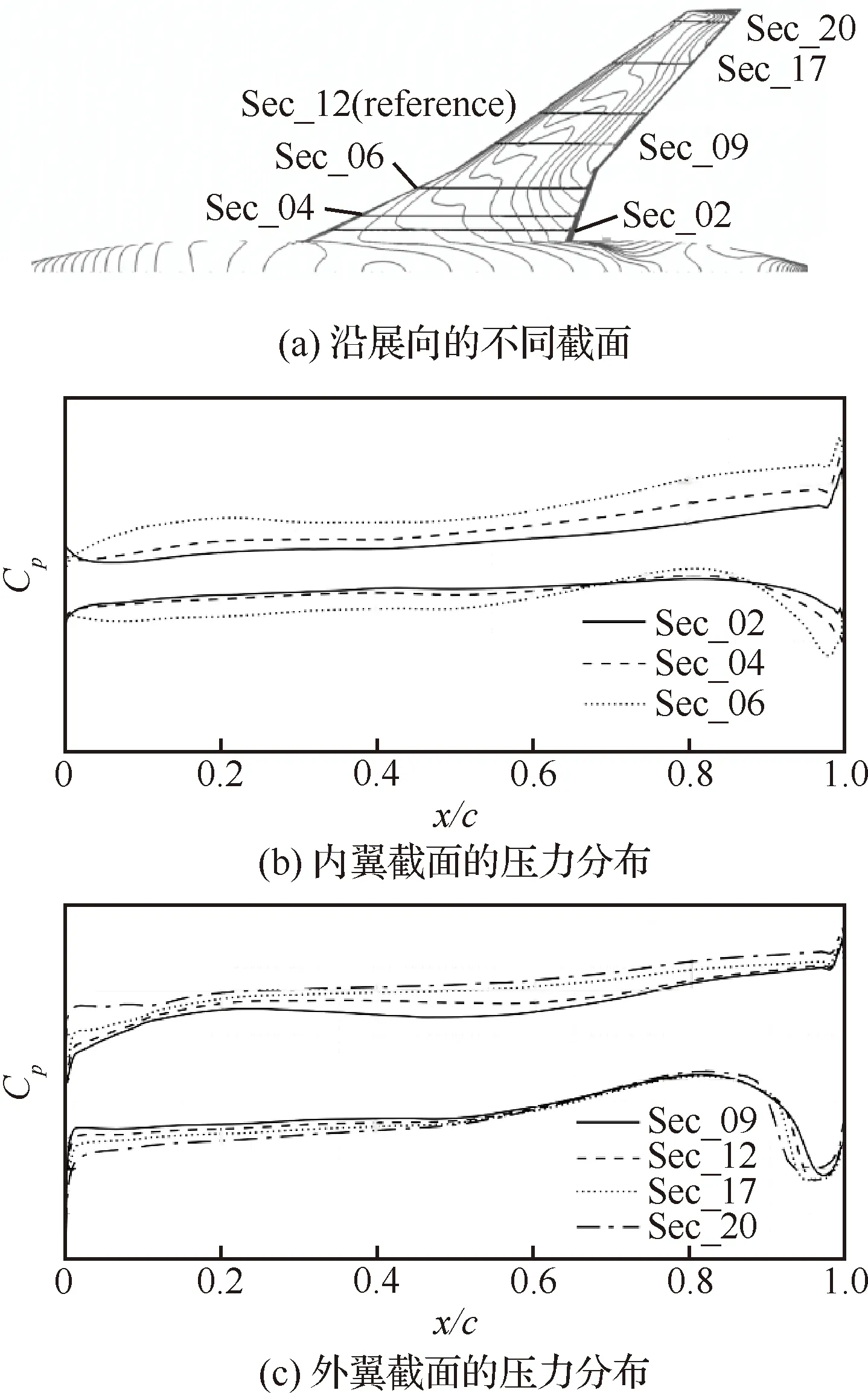
圖52 全局優(yōu)化的壓力分布[117]
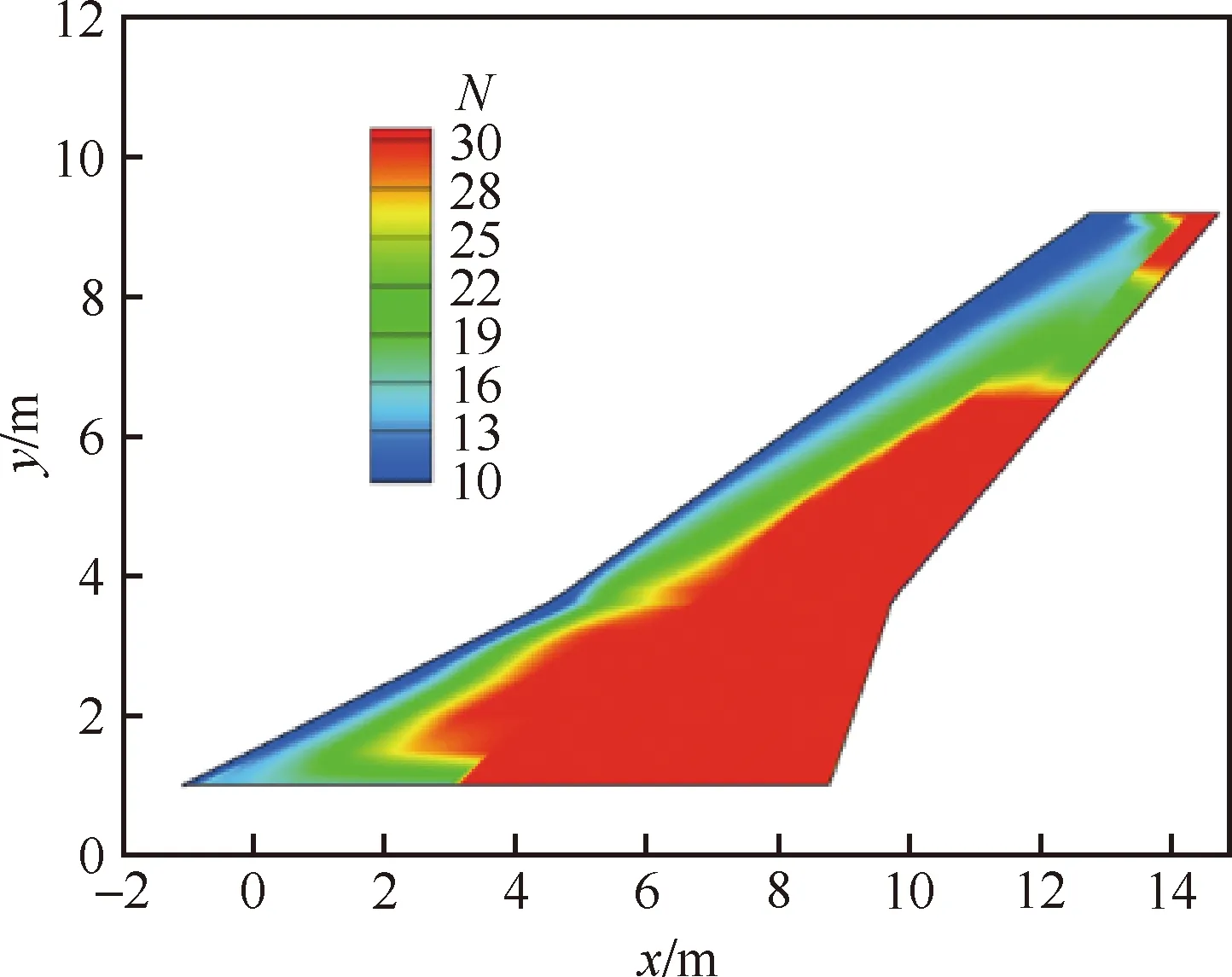
圖53 全局優(yōu)化的N因子等值線圖[117]
ONERA局部?jī)?yōu)化的結(jié)果如圖54[117]和圖55[117]所示。J=20截面的壓力峰值引起了流動(dòng)分離,導(dǎo)致外翼與內(nèi)翼連接處出現(xiàn)了低N因子區(qū)域(藍(lán)色區(qū)域)。從其余截面的優(yōu)化結(jié)果來看,局部?jī)?yōu)化通過對(duì)機(jī)翼前緣局部形狀的修改,達(dá)到了超聲速層流布局優(yōu)化的目的。
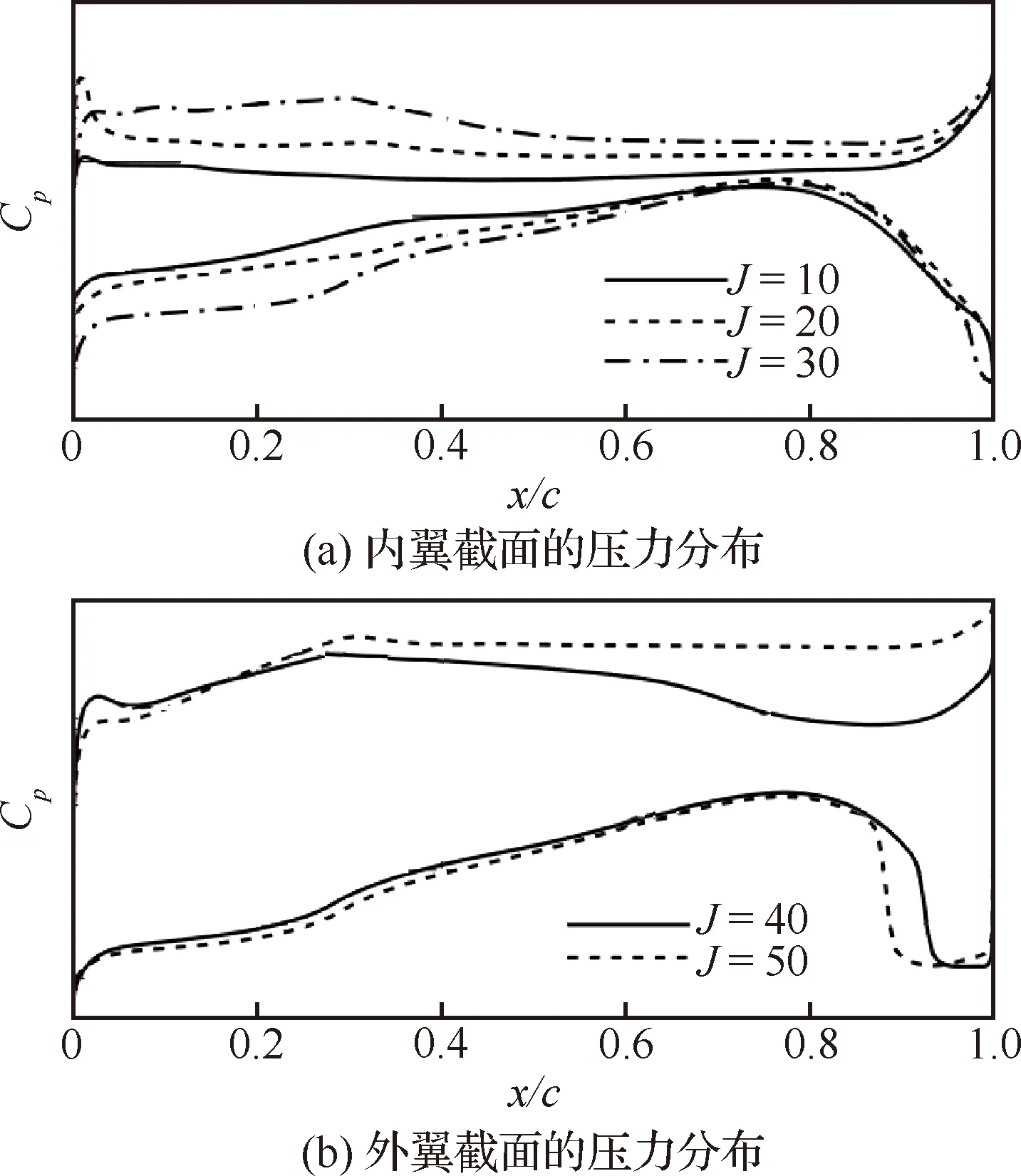
圖54 局部?jī)?yōu)化的壓力分布[117]
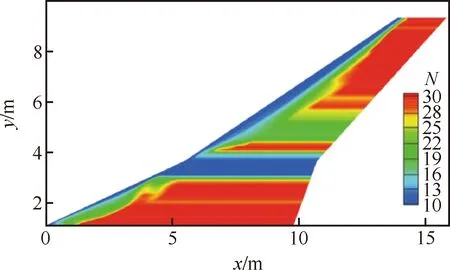
圖55 局部?jī)?yōu)化的N因子等值線圖[117]
4.4 航空工業(yè)空氣動(dòng)力研究院與西北工業(yè)大學(xué)聯(lián)合設(shè)計(jì)案例
近期航空工業(yè)空氣動(dòng)力研究院與西北工業(yè)大學(xué)聯(lián)合開展了超聲速大后掠等直機(jī)翼層流風(fēng)洞試驗(yàn)標(biāo)準(zhǔn)模型的設(shè)計(jì)與評(píng)估工作。
針對(duì)超聲速大后掠機(jī)翼的橫流轉(zhuǎn)捩問題,擬在更接近真實(shí)飛行條件下開展試驗(yàn)研究,即采用更大尺寸的機(jī)翼和更高雷諾數(shù)的試驗(yàn)環(huán)境。參考 Owens等[53]的研究,設(shè)計(jì)了超聲速大后掠等直機(jī)翼層流風(fēng)洞試驗(yàn)標(biāo)準(zhǔn)模型。該模型保持了盡可能簡(jiǎn)單的機(jī)翼幾何形狀,以便于計(jì)算流體力學(xué)建模,同時(shí)仍能捕捉超聲速后掠機(jī)翼的橫流轉(zhuǎn)捩現(xiàn)象。試驗(yàn)風(fēng)洞為航空工業(yè)空氣動(dòng)力研究院的FL-60超聲速風(fēng)洞, 試驗(yàn)段尺寸為1.2 m×1.2 m,來流湍流度低于7‰。
模型參數(shù)如圖56所示,根弦長為946 mm,垂直于前緣的翼型弦長為400 mm,翼型最大厚度40 mm,展長600 mm,機(jī)翼前緣后掠角65°,剖面翼型為雙弧翼型,前緣半徑為0.254 mm。雙凸翼型的設(shè)計(jì)保證了機(jī)翼無凹曲面,避免G?rtler渦的產(chǎn)生;較小的前緣半徑也保證了前緣線雷諾數(shù)Reθ小于100,避免前緣污染和前緣線自然轉(zhuǎn)捩。
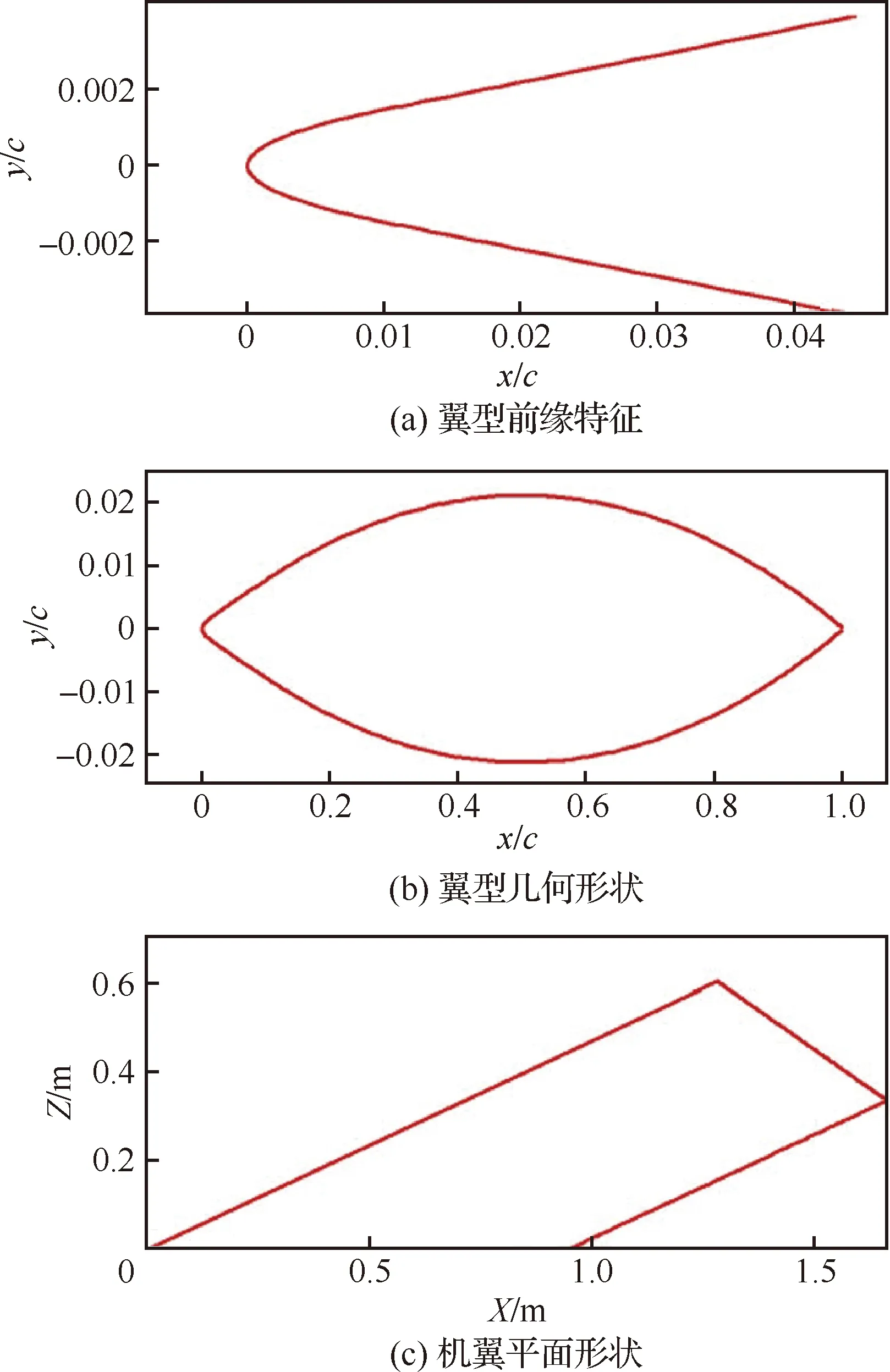
圖56 后掠翼幾何形狀
圖57為模型的表面壓力分布和剖面弦向壓力分布。計(jì)算狀態(tài)參考風(fēng)洞試驗(yàn)狀態(tài):來流馬赫數(shù)為2.0,迎角0°,單位雷諾數(shù)為18.41×106/m。由弦向的壓力分布曲線可以看出,機(jī)翼表面整體保持順壓梯度,預(yù)計(jì)會(huì)在前緣附近發(fā)生由橫流不穩(wěn)定性主導(dǎo)的轉(zhuǎn)捩。
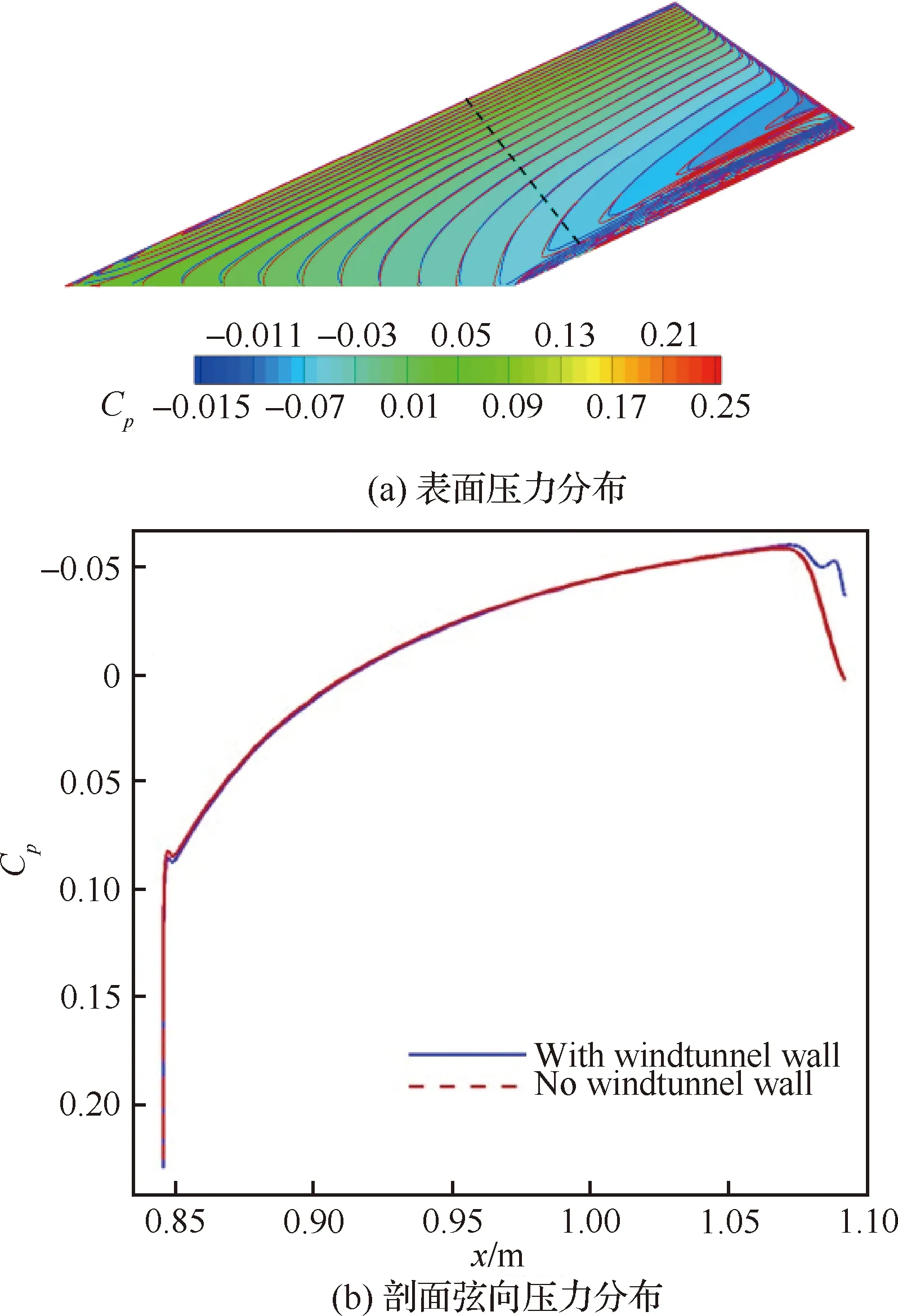
圖57 機(jī)翼表面壓力云圖和弦向壓力分布曲線
層流評(píng)估采用的是西北工業(yè)大學(xué)自主研發(fā)的耦合eN轉(zhuǎn)捩預(yù)測(cè)方法的PMNS3D軟件[68]。圖58 為單位雷諾數(shù)為18.41×106/m時(shí)的橫流速度型。由于前緣逆壓影響,橫流速度型在x/c=0.01處第1次反向,在隨后的順壓影響下,橫流速度型在x/c=0.02處第2次反向。
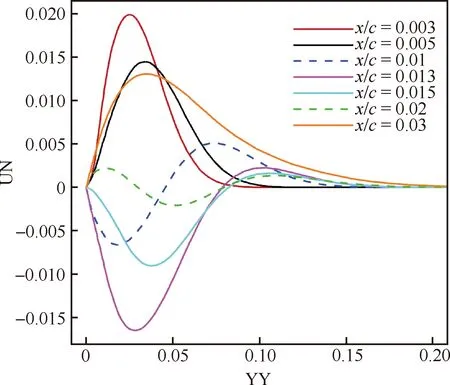
圖58 橫流速度型分布
圖59為單位雷諾數(shù)為18.41×106/m時(shí),不同頻率擾動(dòng)的放大率隨波角的變化情況,可見不穩(wěn)定擾動(dòng)均在波角為正的方向增長,因此均為橫流行波擾動(dòng)。圖60和圖61分別是不同頻率下的橫流擾動(dòng)N值包絡(luò)線以及不同波數(shù)的橫流駐波、橫流行波擾動(dòng)N值。可以看出,隨著頻率從0 Hz 增加到23 kHz,橫流不穩(wěn)定增強(qiáng);當(dāng)頻率進(jìn)一步增加到36 kHz時(shí),橫流不穩(wěn)定性在垂直前緣距離約70 mm的位置下游減弱,而在其上游略有增強(qiáng);此外,最不穩(wěn)定橫流駐波的展向波數(shù)約為3 085/m,而23 kHz時(shí)最不穩(wěn)定橫流行波的展向波數(shù)約為2 021/m,略低于橫流駐波。
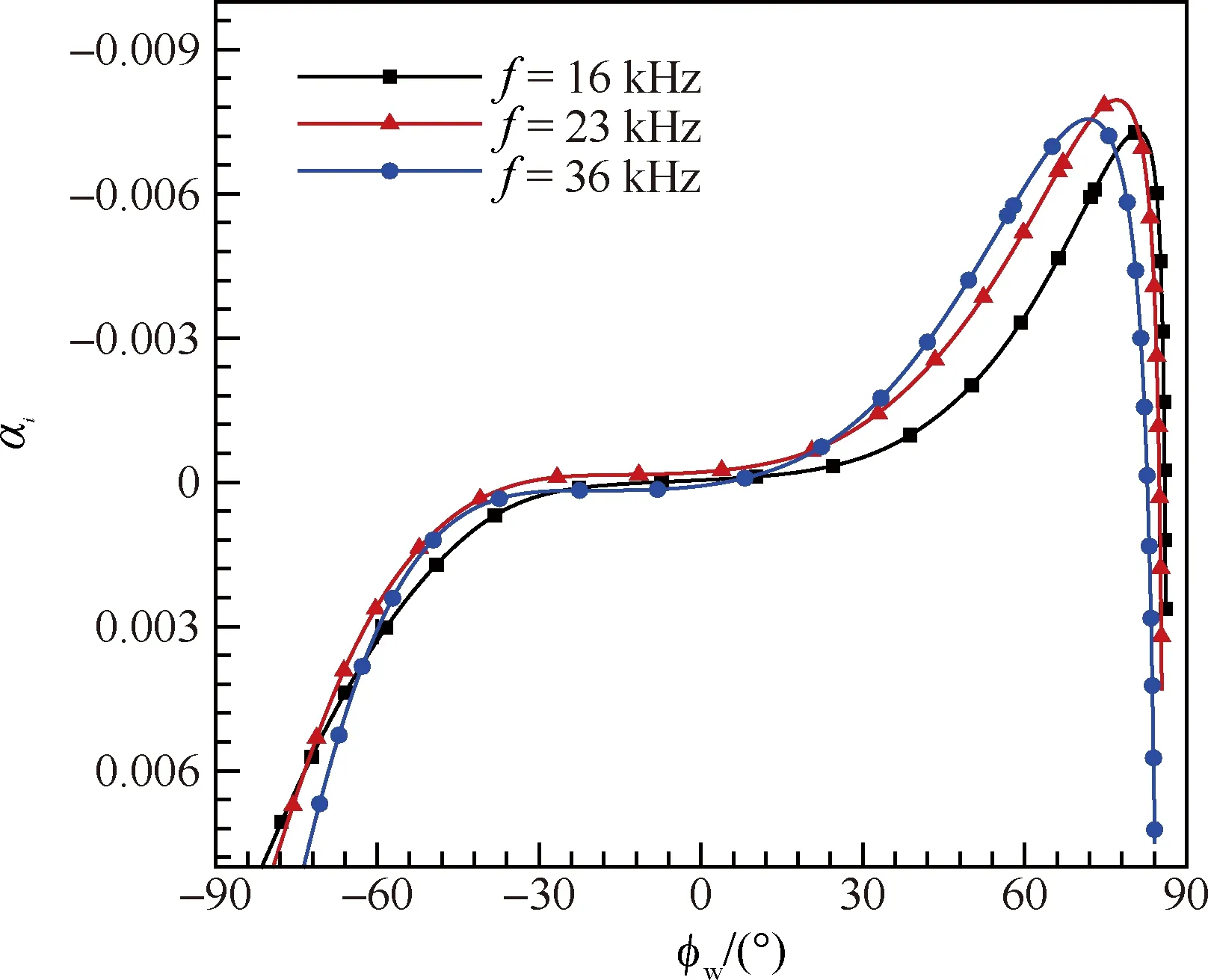
圖59 單位雷諾數(shù)為18.41×106/m時(shí)不同頻率的擾動(dòng)放大率隨波角的變化(xn=50 mm)
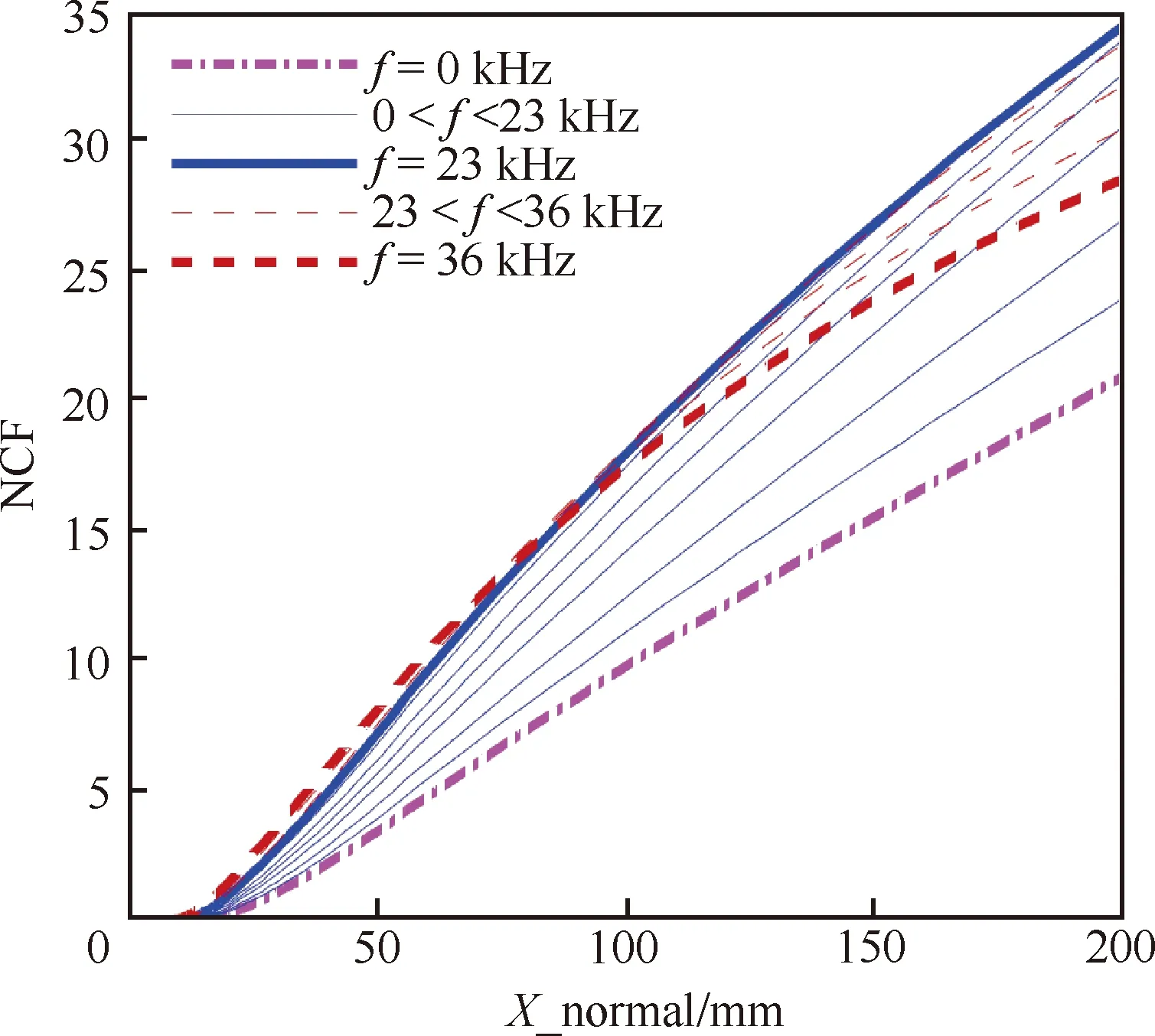
圖60 單位雷諾數(shù)為18.41×106/m時(shí)不同頻率的橫流駐波和行波擾動(dòng)N值包絡(luò)線

圖61 單位雷諾數(shù)為18.41×106/m時(shí)橫流駐波和行波N值
后續(xù)將開展風(fēng)洞試驗(yàn)研究,對(duì)橫流駐波和行波進(jìn)行測(cè)量。這里簡(jiǎn)要介紹一下試驗(yàn)方案:
1) 采用升華法和紅外熱像技術(shù)捕獲模型表面的轉(zhuǎn)捩圖案,通過圖像處理提取駐波空間波長數(shù)據(jù)。
2) 采用動(dòng)態(tài)壓力傳感器測(cè)量模型表面的壓力脈動(dòng),通過信號(hào)相關(guān)性分析,計(jì)算行波波角、相速度。
3) 分別改變來流雷諾數(shù)、表面粗糙度,研究這兩個(gè)因素對(duì)橫流不穩(wěn)定性的影響。
5 總結(jié)與展望
本文以新一代超聲速民機(jī)的巡航減阻問題為背景,詳細(xì)地介紹了國內(nèi)外在超聲速飛機(jī)層流布局設(shè)計(jì)與評(píng)估技術(shù)方面的研究現(xiàn)狀與進(jìn)展:
1) 在超聲速層流布局設(shè)計(jì)技術(shù)方面:① 針對(duì)中等雷諾數(shù)狀態(tài)的自然層流設(shè)計(jì)技術(shù)已經(jīng)得到了很好的驗(yàn)證,但在非設(shè)計(jì)點(diǎn)以及真實(shí)尺寸飛機(jī)的高雷諾數(shù)下,還不能取得令人滿意的效果;② 以 聲學(xué)超表面、分布式粗糙元、等離子體激勵(lì)器為代表的層流控制技術(shù)展現(xiàn)出良好的工業(yè)應(yīng)用前景,但離實(shí)際應(yīng)用尚有距離,還需更深入地進(jìn)行研究。
2) 在超聲速層流設(shè)計(jì)評(píng)估技術(shù)方面:① 以eN方法和間歇因子輸運(yùn)模型為代表的轉(zhuǎn)捩數(shù)值模擬技術(shù)得到了廣泛地應(yīng)用與發(fā)展,但在準(zhǔn)確預(yù)測(cè)轉(zhuǎn)捩位置上還存在不足;② 由于來流擾動(dòng)較大和尺寸限制,風(fēng)洞試驗(yàn)評(píng)估的層流結(jié)果與飛行試驗(yàn)存在較大差距,如何通過風(fēng)洞試驗(yàn)數(shù)據(jù)預(yù)測(cè)真實(shí)飛行的轉(zhuǎn)捩情況是風(fēng)洞試驗(yàn)層流評(píng)估技術(shù)面臨的主要難題;③ 飛行試驗(yàn)?zāi)塬@得最為真實(shí)的轉(zhuǎn)捩數(shù)據(jù),但受制于試驗(yàn)成本和測(cè)量技術(shù)限制,目前相關(guān)的數(shù)據(jù)積累較少,還不足以對(duì)數(shù)值評(píng)估和風(fēng)洞試驗(yàn)評(píng)估提供有效的指導(dǎo)。
綜合來看,超聲速飛機(jī)層流布局設(shè)計(jì)與評(píng)估技術(shù)未來應(yīng)當(dāng)著重考慮以下幾個(gè)方面發(fā)展:
1) 尋找適用于接近實(shí)際飛行狀態(tài)的高雷諾數(shù)條件的自然層流機(jī)翼幾何外型,特別是在飛行參數(shù)小范圍偏離設(shè)計(jì)點(diǎn)時(shí),仍能保持一定的魯棒性,以適應(yīng)實(shí)際航行中的條件微幅變化。
2) 考慮采用流動(dòng)控制技術(shù)延遲機(jī)翼表面邊界層轉(zhuǎn)捩,特別是采用流動(dòng)控制與自然層流協(xié)同設(shè)計(jì)的方式,獲得更加魯棒的設(shè)計(jì)效果。
3) 結(jié)合地面風(fēng)洞試驗(yàn)和飛行試驗(yàn)數(shù)據(jù),開展轉(zhuǎn)捩模型參數(shù)標(biāo)定,提高轉(zhuǎn)捩數(shù)值預(yù)測(cè)技術(shù)和程序的可靠性。
4) 開展超聲速布局的轉(zhuǎn)捩問題的天地一致性研究,建立數(shù)值模擬、風(fēng)洞試驗(yàn)與飛行試驗(yàn)的天地?fù)Q算關(guān)系,進(jìn)一步提高層流布局設(shè)計(jì)評(píng)估技術(shù)的工程實(shí)用化。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04