滑動放電等離子體控制細長體頭部背風區(qū)非對稱渦實驗研究
2022-12-09 08:58:46金元中鄭博睿喻明浩劉園鵬張倩孫正中于濤
實驗流體力學 2022年5期
金元中,鄭博睿,*,喻明浩,*,劉園鵬,張倩,孫正中,于濤
1. 西安理工大學,西安 710048 2. 倫敦大學 城市學院,倫敦 EC1V 0HB 3. 重慶交通大學 綠色航空技術研究院,重慶 401135
0 引 言
戰(zhàn)斗機的機動性和敏捷性是決定空戰(zhàn)勝負的關鍵因素,其中機動性已成為現(xiàn)代戰(zhàn)斗機最重要的技術指標之一[1]。為了獲得戰(zhàn)術優(yōu)勢,要求飛行器能在大迎角甚至在過失速條件下機動飛行。當細長體飛行器大迎角機動飛行時,其繞流流場呈現(xiàn)出復雜多渦流動現(xiàn)象,流場參數(shù)變化迅速,邊界層的分離,旋渦的形成、發(fā)展和破裂以及不對稱渦的產(chǎn)生,導致氣動力和力矩出現(xiàn)很強的非定常非線性特性,最終在大迎角無側滑狀態(tài)下,產(chǎn)生強度很大、隨機出現(xiàn)的側向力和偏航力矩,影響飛行性能[2-4]。
已有研究發(fā)現(xiàn):飛行器細長體背風區(qū)的非對稱渦是產(chǎn)生這些隨機側向力的直接原因,側向力的方向和大小均由這些強度和位置不對稱的旋渦決定[5]。因此,需要尋求有效的控制手段抑制細長體背風區(qū)非對稱渦的形成與發(fā)展,控制側向力和偏航力矩,為提升飛行器大迎角飛行時的操縱性和穩(wěn)定性提供技術支撐。
對于大迎角下細長體背風區(qū)非對稱渦的成因,目前主要有兩個觀點[6-9]:1)黏性觀點。在黏性作用下,細長體頭部背風區(qū)邊界層轉捩點不對稱,造成該區(qū)域分離點不對稱,從而導致渦脫落點不對稱,進而演化為非對稱渦,最終產(chǎn)生方向和大小隨機的側向力。2)無黏觀點。細長體背風區(qū)旋渦在空間上存在不穩(wěn)定性,造成旋渦的空間拓撲結構不對稱,進而誘發(fā)背風區(qū)流動不對稱,最終產(chǎn)生不可預測的側向力。
部分學者傾向于認同無黏觀點[9]。本文基于“無黏觀點”設計了順流式滑動放電等離子體激勵器,旨在沿來流方向在細長體頭部背風區(qū)兩側產(chǎn)生對稱的等離子體激勵,在附壁效應作用下,細長體頭部背風區(qū)兩側的等離子體射流在背風區(qū)中心位置匯聚為一股合成射流,起到類似三角翼背鰭將渦對隔離的效果,削弱非對稱渦之間的相互作用,提高旋渦的穩(wěn)定性。
根據(jù)有無外在能量輸入,細長體非對稱渦控制技術可分為被動控制技術和主動控制技術。被動控制技術主要有邊界層轉捩帶、微鼓包、微凹坑、邊條、頭部鈍化、自激振蕩旗幟和渦流發(fā)生器等。主動控制技術主要有等離子體發(fā)生器、單孔位微吹氣、頭部軸向吹氣、合成射流激勵器、非定常小擺振片和微充氣邊條等[10]。與主動流動控制技術相比,被動流動控制技術需要改變細長體外部構型,導致成本增加;同時,當外部流場發(fā)生變化時,被動控制技術不能根據(jù)流場環(huán)境進行實時調(diào)節(jié),控制效果降低。因此,近年來主動控制技術得到了更多的關注[11]。
等離子體流動控制技術是利用等離子體氣動激勵改善氣動特性的新概念主動流動控制技術,具有響應時間短、無運動部件、激勵頻帶寬等技術優(yōu)勢,已在機翼增升減阻、壓氣機擴穩(wěn)增效和激波特性控制等方面取得重要進展[12]。近年來,等離子體控制細長體背風區(qū)非對稱渦的研究越來越受到國內(nèi)外關注。孟宣市[13-14]、鄭博睿[15]、王健磊[16]、龍玥霄[17]等對采用等離子體流動控制技術的非對稱渦流動控制機理進行了深入研究,在提高可控來流雷諾數(shù)、電參數(shù)最優(yōu)化(激勵電壓、脈沖頻率和占空比)、激勵器幾何參數(shù)最優(yōu)化(激勵器尺寸、結構和放電類型)等方面取得了一定成果[18-20]。
近年來,在介質阻擋放電等離子體激勵器(Dielectric Barrier Discharge,DBD)研究的基礎上,國內(nèi)外開展了一系列等離子體滑動放電(sliding discharge)方面的研究[21-23]:通過給DBD 增加滑動電極、接入高壓直流,提升DBD 激勵器表面電場;激勵器上表面中性粒子在更強的電場作用下,進一步促進DBD 表面空氣電離;帶電離子在電場力驅動下,向滑動電極加速運動;隨著直流電壓增強,等離子體放電面積增大,產(chǎn)生滑動放電效果。研究發(fā)現(xiàn),與常規(guī)DBD 相比,滑動放電可以增大流動控制有效區(qū)域(dm2量級),提升最大誘導速度(同比提升1.5 倍),實現(xiàn)誘導射流方向可控(0°~180°可調(diào)),極大改善等離子體流動控制效果[24-26]。
為進一步改善等離子體流動控制效果,本文根據(jù)非對稱渦成因假設,設計了順流式四電極滑動放電等離子體激勵器,即在常規(guī)介質阻擋放電等離子體激勵器(DBD)基礎上增加2 個裸露電極作為滑動電極,目的是擴大等離子體放電面積以增強等離子體誘導產(chǎn)生的體積力。
本文通過風洞實驗研究不同激勵電壓、不同來流速度對細長體頭部背風區(qū)非對稱渦控制效果的影響規(guī)律。根據(jù)測壓系統(tǒng)和粒子圖像測速儀(PIV)的同步測量,分析等離子體激勵誘導的旋渦與非對稱渦之間動態(tài)相互作用的時空演變規(guī)律,進一步闡明等離子體放電對細長體繞流流場和非對稱渦空間拓撲結構的作用效果。
1 實驗設備及模型
1.1 實驗風洞及模型
實驗在空軍工程大學低速閉環(huán)回流式風洞(圖1)中開展。風洞實驗段長1.0 m、寬1.2 m、高1.0 m,風速可調(diào)范圍5~75 m/s,湍流度小于0.2%。
細長體圓錐實驗模型底部直徑120 mm、圓錐半頂角10°,圓錐可拆卸頭部長150 mm。安裝初始迎角45°,側滑角0°,可通過迎角機構精確調(diào)節(jié),誤差為0.2°,如圖2 所示。模型表面測壓系統(tǒng)采用PSI 公司的9816 壓力傳感器,采樣頻率為100 Hz,壓力誤差為0.1% FS,采集量程為±1 psi(6.895 kPa)。實驗中,壓力傳感器對每個狀態(tài)均采集10 s。
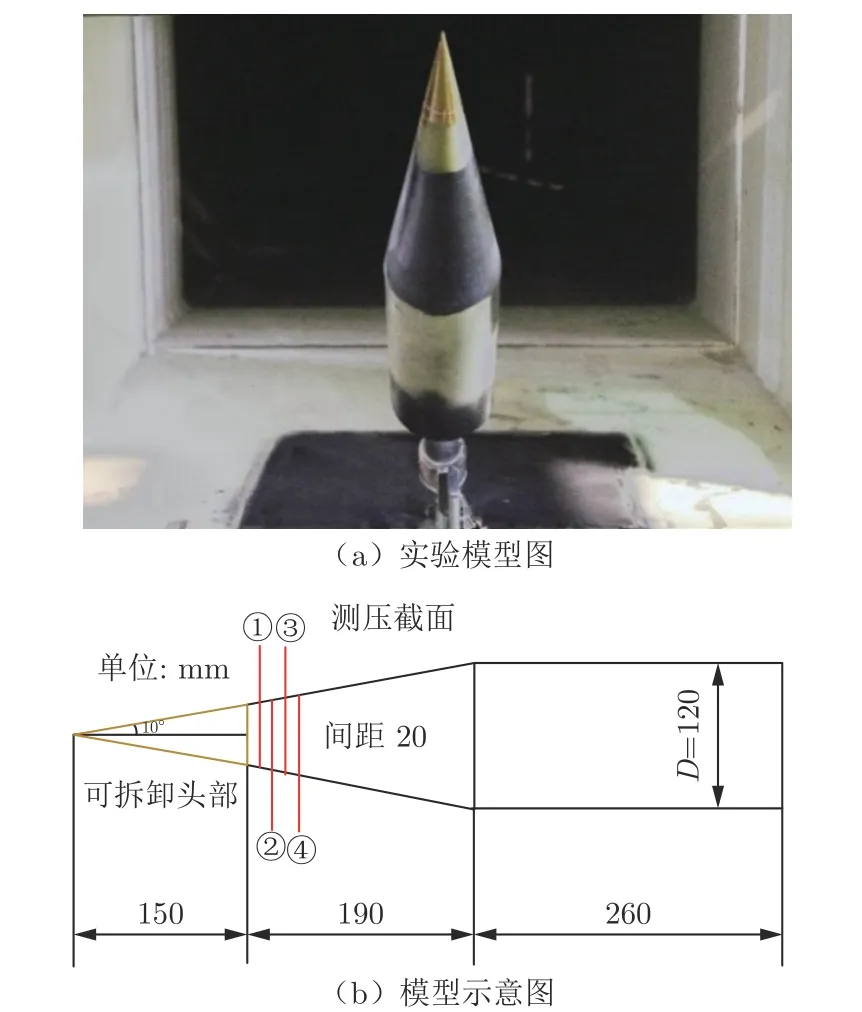
圖2 細長體實驗模型及模型示意圖[25]Fig. 2 Schematic diagram of slender body[25]
采用二維PIV 對細長體頭部背風區(qū)非對稱渦的精細空間結構進行了定量研究。使用2048 像素×2048 像素的CCD 相機進行拍攝,拍攝截面為測壓截面①,距離細長體頂點170 mm,如圖2(b)所示,圖像采集頻率為5 Hz。激光以45°角照射于測壓截面①。為避免模型表面反光影響拍攝效果,在細長體可拆卸頭部之外的表面均勻噴涂啞光黑漆。PIV 示蹤粒子判定準則為[27]:
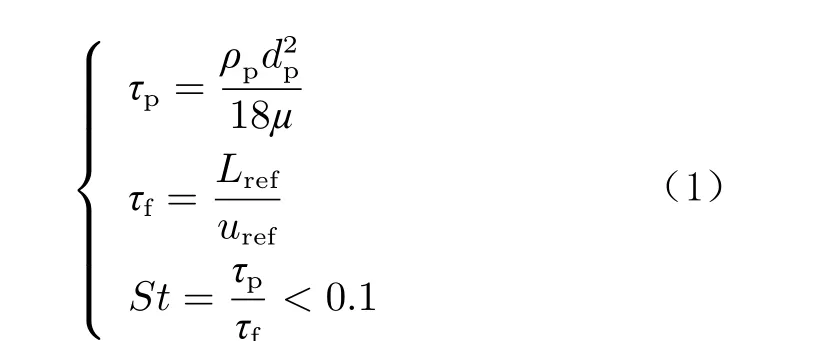
式中:τp、ρp和dp分別為示蹤粒子的響應時間、密度和直徑;μ為空氣動力黏度;τf為外流特征時間;Lref為實驗模型特征尺度;uref為實驗主流速度。當斯托克斯數(shù)St<0.1 時,示蹤粒子和外界流動有較高的同步性。經(jīng)過計算,采用煙餅產(chǎn)生直徑為2 μm、密度為1000 kg/m3的示蹤粒子,投放于風洞實驗段前端拐角處。根據(jù)相機成像原理,有如下公式[27]:
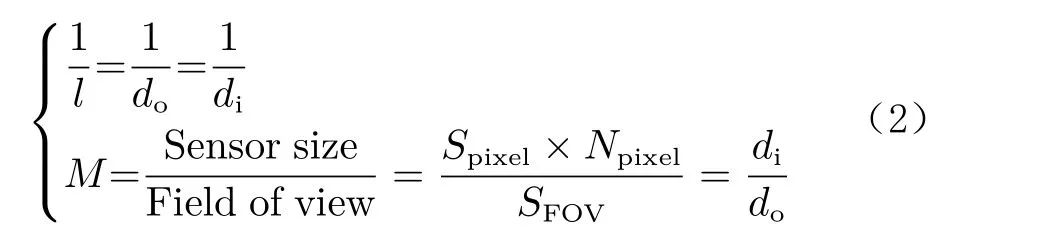
式中:l 為相機焦距;do為物距,di為像距;M 為成像放大倍數(shù);Spixel為像素點面積,Npixel為像素點個數(shù);SFOV為被測流場面積。經(jīng)過計算,確定了成像放大倍數(shù)(M=0.1)和相機布置位置(與測壓截面①距離675 mm 處,如圖3 所示)。

圖3 PIV 實驗布局示意圖Fig. 3 Schematic diagram of PIV experiment layout
PIV 實驗布局如圖3 所示。基于前期風洞實驗[25],選擇CTP-2000K 電源作為脈沖高壓電源,選取流動控制效果較好的激勵參數(shù)開展本次實驗研究(脈沖頻率f=300 Hz,占空比τ=30%)。實驗中的其他電參數(shù):載波頻率fc=7.45 kHz,高壓直流電壓UDC=–6.2 kV。
1.2 滑動放電等離子體激勵器
本實驗采用四電極滑動放電等離子體激勵器,與常規(guī)DBD 激勵器相比,可以產(chǎn)生更大面積的等離子體放電。
首先,將一對裸露的帶狀電極(長70 mm、寬1 mm,以厚度0.03 mm 的銅箔制成)對稱布置于細長體圓錐實驗模型頭部表面(沿圓錐母線布置,周向角度θ分別為+90°和–90°),在2 個裸露電極之間的絕緣層下方布置扇形覆蓋電極,形成常規(guī)DBD 激勵器。絕緣層由厚度1 mm、相對介電常數(shù)2.17 的聚四氟乙烯薄絕緣材料制成。前期研究發(fā)現(xiàn):激勵器位置越接近圓錐頂點,流動控制效果越好;但若過于接近,激勵器前端容易產(chǎn)生電弧放電。為兼顧激勵器“盡量接近圓錐頂點”和“避免前端產(chǎn)生電弧放電”這兩個原則,本實驗中帶狀電極前端距圓錐頂點20 mm。為進一步改善DBD 激勵器的流動控制效果,在2 個帶狀電極正中間、絕緣層上表面增加1 個等腰三角形的裸露電極作為滑動電極(以厚度0.03 mm 的銅箔制成),其兩側與帶狀電極均相距10 mm。滑動電極邊長約30 mm,底邊長約15 mm,前端距圓錐頂點60 mm。在2 個帶狀電極上施加交流電,滑動電極連接至高壓直流,在圓錐可拆卸頭部即可產(chǎn)生大面積的滑動放電。為防止滑動電極產(chǎn)生尖端放電,將其3 個角手工修剪出平滑圓形倒角。滑動放電等離子體激勵器示意圖及實物圖如圖4 所示。
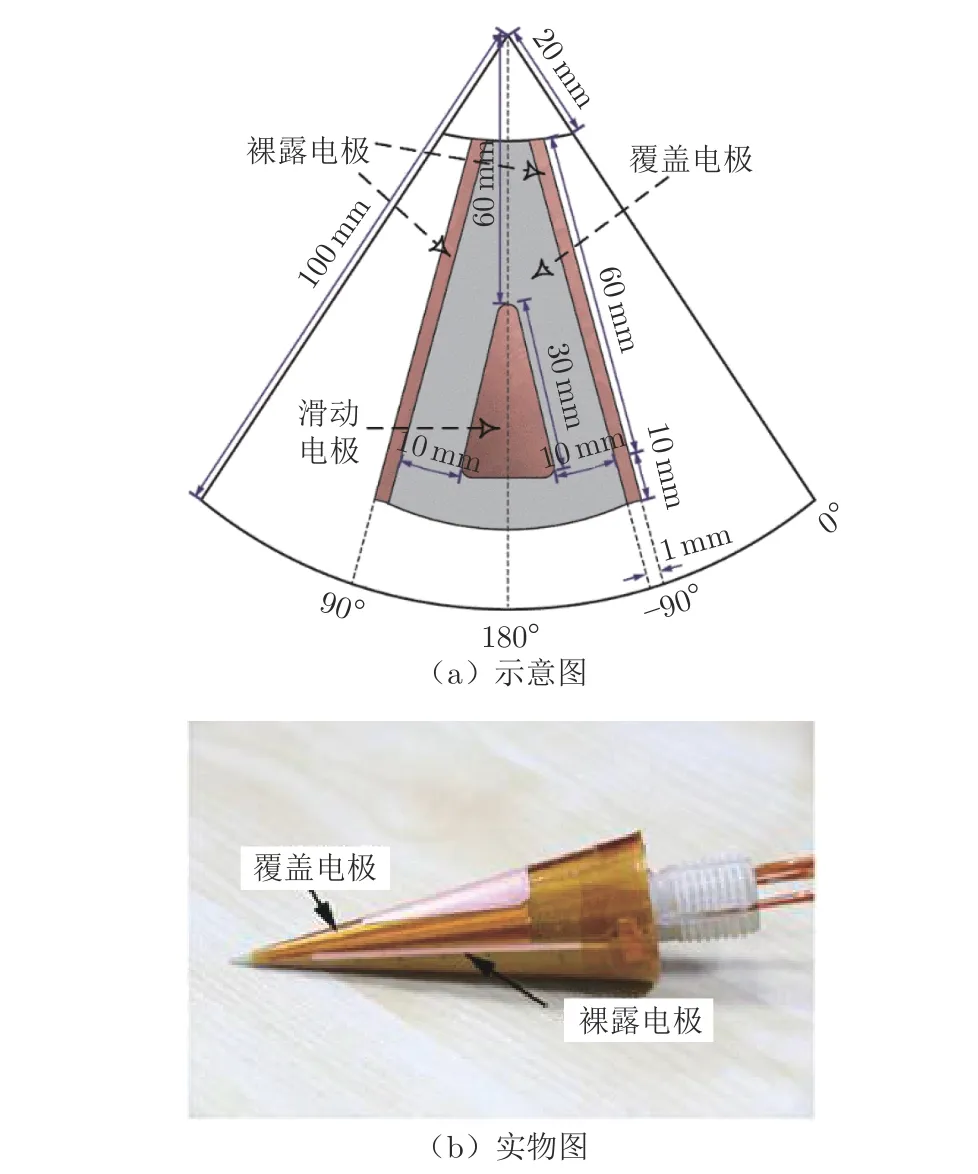
圖4 滑動放電等離子體激勵器示意圖及實物圖Fig. 4 Schematic diagram and image of sliding discharge plasma actuator
2 實驗結果分析
2.1 激勵電壓的影響
保持來流速度u∞=10 m/s 和迎角α=45°,選取脈沖頻率f=300 Hz(歸一化頻率f+=1.96)、占空比τ=0.3、直流電壓UDC=–6.2 kV,研究不同激勵電壓Up-p(8、10、12、14 和16 kV)對細長體表面壓力Cp分布的影響,結果如圖5 所示。在關閉等離子體激勵時(Plasma off),左側吸力峰值較高(|Cp|=0.8969,θ=75°處),右側吸力峰值較低(|Cp|=0.1221,θ=195°處),說明此時細長體背部左側旋渦距表面更近,右側旋渦距表面較遠,表現(xiàn)為明顯的非對稱渦結構。

圖5 不同激勵電壓下的細長體表面壓力分布Fig. 5 The pressure distribution with different actuation voltages
與關閉等離子體激勵時相比,當激勵電壓增大至8 kV,細長體表面壓力分布曲線左右兩側壓力分布變化不大,仍表現(xiàn)出明顯的非對稱結構;當激勵電壓增大至10 kV,左側吸力峰值(|Cp|)有所降低,右側 吸 力 峰 值 有 所 上 升,從0.1221 變 化 至0.1547(θ=195°處),兩側壓力分布向對稱趨勢發(fā)展;當激勵電壓增大至14 kV,左右兩側吸力峰值之差大幅減小,左 側 吸 力 峰 值 從0.8969 變 化 至0.8491(θ=75°處),右側吸力峰值有所上升,從0.1221 變化至0.2935(θ=195°處),非對稱渦結構向對稱狀態(tài)演變;當激勵電壓增大至16 kV,從圖5(b)可明顯看到:兩側壓力分布接近對稱;左側吸力峰值從0.8969 變化至0.4872(θ=75°處),右側吸力峰值從0.1221 變化至0.4146(θ=195°處);兩側最大峰值之差從初始的0.7718 降低至0.0726,降幅達90.6%,表明此時細長體頭部背風區(qū)由原本的非對稱渦結構演變?yōu)閷ΨQ渦結構。
對比圖5(a)和(b)可以發(fā)現(xiàn):隨著激勵電壓的升高,右側吸力峰值上升,左側吸力峰值降低,兩側壓力分布趨于對稱,細長體背風區(qū)由原本的非對稱渦向對稱渦演變。其機理在于:
1)細長體頭部背風區(qū)左右兩側對稱布置的等離子體激勵器沿來流方向產(chǎn)生兩組等量的誘導射流,由于附壁效應,誘導射流會貼著細長體背部曲面向背部中央運動,最終在背部中央?yún)R聚為合成射流,阻斷非對稱渦之間的相互干擾,形成了新的渦系結構空間分布。
2)等離子體激勵電壓越高,激勵能量越強,邊界層與主流之間的動量交換更強,導致分離點后移,同時在細長體背部中央?yún)R聚為合成射流的能量增強,對非對稱渦之間動態(tài)干擾的抑制效果加強,使得背風區(qū)旋渦更貼近細長體表面,重新形成穩(wěn)定的非對稱渦空間拓撲結構,流動更不易分離。
圖6 為測壓截面①處不同激勵電壓下非對稱渦空間結構的PIV 流場顯示結果。圖中,藍色代表順時針正渦量,紅色代表逆時針負渦量。當關閉滑動放電等離子體激勵時,左側藍色旋渦離表面較近,右側紅色旋渦離表面較遠,形成非對稱空間拓撲結構。開啟等離子激勵時,左側旋渦位置變化不大,右側旋渦向表面靠近。當激勵電壓增大至10 kV 時,左側旋渦開始遠離表面;繼續(xù)增大至12 kV,左右兩側旋渦高度差縮小,旋渦的空間非對稱性得到抑制;當激勵電壓增大至16 kV 時,右側旋渦從高位渦演化為低位渦,兩側旋渦空間位置趨于對稱,旋渦的空間非對稱性基本得到抑制。
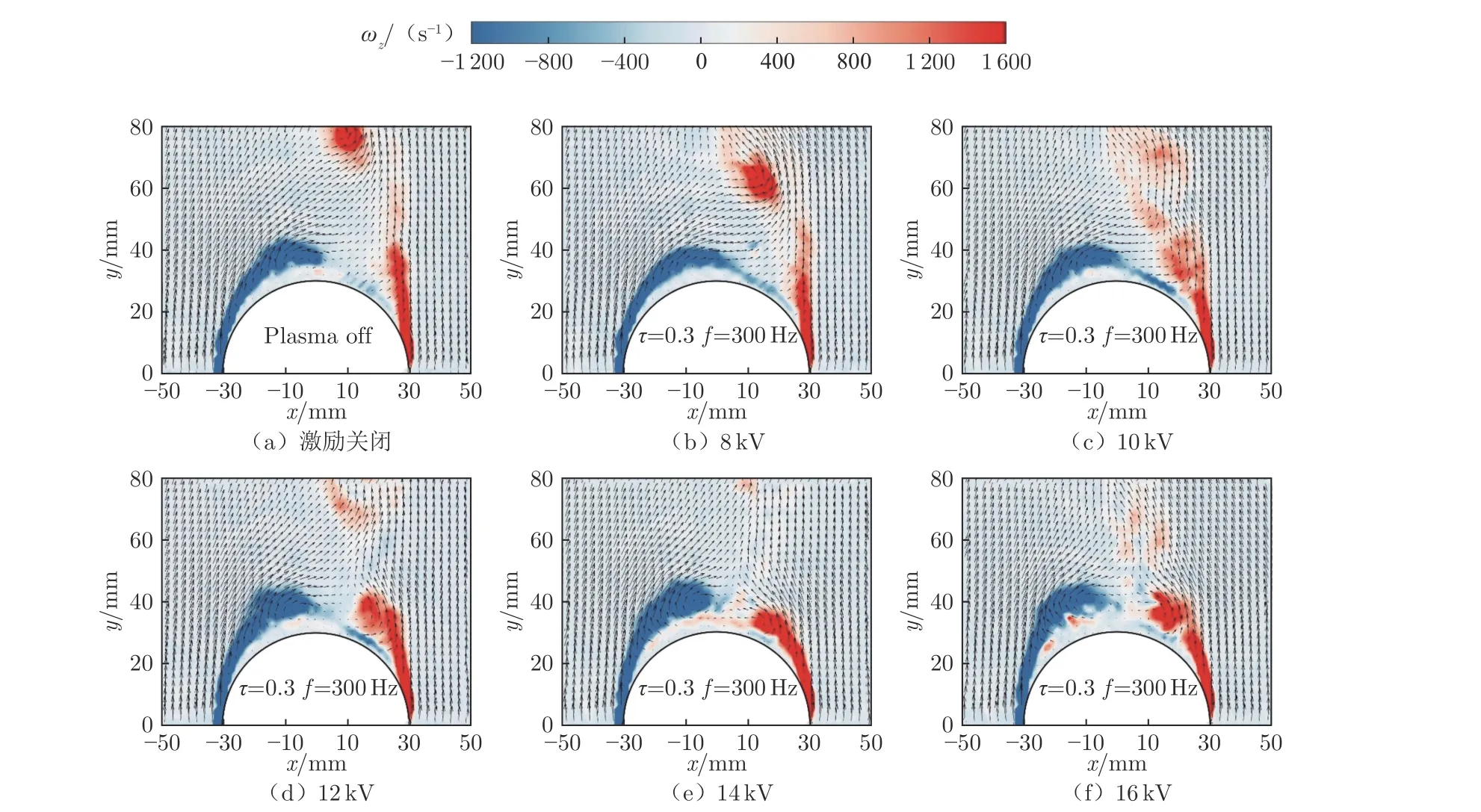
圖6 不同激勵電壓下的等離子體流動控制PIV 測量結果Fig. 6 PIV measurement plasma flow control results at different actuation voltages
為分析不同激勵電壓下滑動放電等離子體激勵器的控制效果,對截面壓力系數(shù)積分,求得局部側向力系數(shù)。側向力系數(shù)CC計算公式如下:

式中:Cn為第n 個截面局部側向力,選定測量截面①(n=1);來流動壓q∞=1/(2ρ∞u∞2),p∞為來流參考靜壓;截面直徑d=19.1 mm;測壓孔個數(shù)k=24;下標i 表示測壓孔編號,pni表示第n 個測壓截面第i 個測壓孔的壓力值;測壓孔間隔角度Δθ=15°。定義側向力指向細長體右側時為正(逆流向右側),可求得關閉等離子體激勵時的局部側向力系數(shù)CC=0.643。
為便于評估等離子體激勵器的控制效率,將施加/未施加控制的側向力系數(shù)之差ΔCC與未施加控制的側向力系數(shù)CC,off的比值定義為側向力控制效率η:
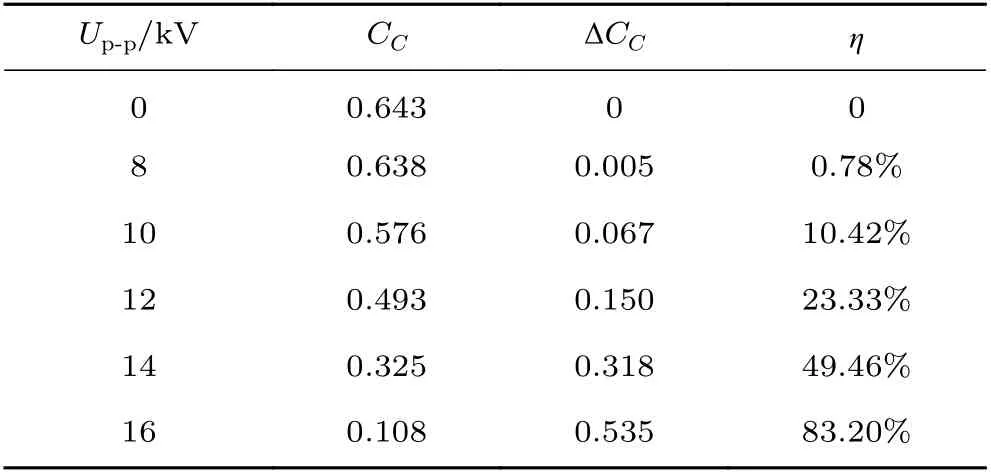
表1 不同激勵電壓對側向力控制的影響分析Table 1 Analysis of the influence of different actuation voltages on lateral force control
2.2 不同來流速度對側向力控制的影響
研究不同來流速度u∞(10、15、20 和25 m/s)下滑動放電等離子體激勵器對細長體表面壓力分布的影響。保持激勵電壓Up-p=16 kV、脈沖頻率f=300 Hz(歸一化頻率f+=1.96)、占空比τ=0.3、直流電壓UDC=–6.2 kV、細長體迎角α=45°。測壓結果如圖7 所示。
由圖7(a)可見:當u∞=10 m/s、關閉等離子體激勵時,左側吸力峰較低(|Cp|=0.0613,θ=75°),右側吸力峰較高(|Cp|=0.6232,θ=285°),兩側峰值差值為0.5619,呈現(xiàn)出明顯的非對稱渦結構。開啟等離子體激勵后,左側吸力峰值上升,而右側吸力峰值降低,兩側峰值差值從0.5619 減小為0.0932,即兩側壓力分布接近對稱,表明在u∞=10 m/s 時,原本明顯的空間非對稱渦受到等離子體激勵的抑制。在此工況下,通過滑動放電在細長體頭部背風區(qū)兩側產(chǎn)生體積力,向邊界層注入流場動量,產(chǎn)生誘導旋渦,形成合成射流,改變了非對稱渦空間結構,有效地抑制了側向力。
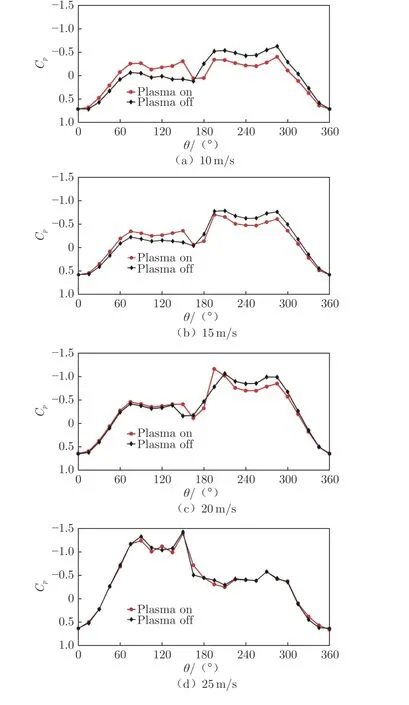
圖7 不同來流速度下的壓力分布對比Fig. 7 Comparison of pressure distributions at different wind speeds
由圖7(b)可見:當u∞=15 m/s 時,左側吸力峰值有所上升,右側吸力峰值有一定程度降低。施加控制可以改善吸力峰值不對稱狀況。對比圖7(a)發(fā)現(xiàn):隨著來流速度增大,非對稱渦控制效果減弱。當u∞=20 m/s 時,施加控制后的吸力峰值不對稱狀況被輕微抑制,與u∞=10 m/s 時相比,控制效果進一步減弱。如圖7(d)所示,當u∞=25 m/s 時,控制基本趨于無效,施加控制后的流場接近未施加控制時的狀態(tài)。
對上述實驗結果進行分析可知:隨著來流速度增大,細長體頭部背風區(qū)邊界層分離線向上游移動,分離區(qū)變大,細長體頭部背風區(qū)非對稱分離渦增強;而等離子體放電產(chǎn)生的動量并未隨之而動態(tài)改變,脈沖激勵注入的能量不足以幫助流體克服隨來流速度增大而逐漸增強的逆壓梯度,細長體頭部背風區(qū)非對稱分離渦的位置未發(fā)生變化,等離子體控制隨來流速度增大而逐漸失效。
圖8 為測壓截面①處不同來流速度下非對稱渦空間結構分布的PIV 流場顯示結果。當u∞=10 m/s、關閉等離子體激勵時,左側藍色旋渦離表面較遠,右側紅色旋渦離表面較近,形成非對稱空間旋渦結構。開啟激勵后,左側旋渦和右側旋渦空間位置趨于對稱,與圖7(a)測壓曲線結果契合,表明滑動放電等離子激勵在此工況下有較好的控制效果。當u∞=15 m/s、開啟激勵時,左側旋渦得到抑制,控制效果與u∞=10 m/s 時近似。對比圖7(a)和(b)的測壓結果可知:u∞=10 m/s 的控制效果更好,壓力分布更加對稱;繼續(xù)增大u∞至20 m/s,控制效果變差,非對稱渦結構和不施加控制的狀態(tài)接近;繼續(xù)增大u∞至25 m/s,非對稱渦系結構趨于未施加控制的狀態(tài),可以認為等離子體控制基本無效。

圖8 不同來流速度下的等離子體流動控制PIV 測量結果Fig. 8 PIV measurement results of plasma flow control with different incoming wind speeds
根據(jù)式(3)計算不同來流速度下施加等離子體控制時的局部側向力系數(shù),根據(jù)式(4)計算滑動放電的側向力控制效率。如表2 所示,當u∞=10 m/s、開啟等離子體激勵時,滑動放電具有較大的控制效率,最高可達83.48%。隨著u∞增大,控制效率逐漸降低。u∞=25 m/s 時,控制效率僅為5.95%。預測在u∞=26 m/s 左右時,等離子體控制細長體非對稱渦無效。因此,還需進一步改善控制手段和方法。

表2 不同來流速度對側向力控制的影響分析Table 2 The influence of different wind speeds on lateral force control
3 結 論
基于滑動放電等離子體控制非對稱渦的應用前景,本文深入研究分析了激勵電壓、來流速度對非對稱渦控制效果的影響規(guī)律,得到如下結論:
1)PIV 流場結果顯示:非對稱側向力的產(chǎn)生是由模型背風區(qū)流場中旋渦的非對稱分布導致;抑制非對稱渦的空間不對稱性是減小側向力的主要方法。本文實驗中,激勵電壓16 kV、脈沖頻率300 Hz(歸一化頻率1.96)、占空比0.3 及直流電壓–6.2 kV是控制細長體非對稱渦的最優(yōu)參數(shù),最大控制效率可達83.48%。
2)實驗所采用的順流式滑動放電等離子體激勵器沿來流方向在細長體頭部背風區(qū)兩側產(chǎn)生對稱的等離子激勵,在附壁效應作用下,兩側等離子體射流在細長體頭部背風區(qū)中心位置匯聚為一股合成射流,削弱非對稱渦之間的相互作用,改變非對稱渦空間結構,提高旋渦的穩(wěn)定性,抑制較大的側向力。
3)激勵電壓是影響等離子體激勵器控制效果的主要因素。相同激勵條件下,放電強度與激勵電壓的大小呈正比。增大激勵電壓可以有效提升體積力,為激勵器附近流場注入更多的動量,從而改變細長體頭部背風區(qū)非對稱渦形態(tài)。
4)自由來流速度對激勵器控制效果有較大影響。相同激勵條件下,自由來流速度越高,控制效果越差。
目前的研究主要集中于中低雷諾數(shù)范圍,與實際工程應用仍有較大差距。為實現(xiàn)等離子體流動控制技術的工程應用,仍需進一步創(chuàng)新控制方法。