基于人機交互的上肢外骨骼訓練康復機器人路徑規劃
2022-12-11 02:37:22譚榮斌魯守銀徐偉杰周大鵬
制造業自動化 2022年11期
譚榮斌,魯守銀,徐偉杰,周大鵬
(山東建筑大學,濟南 250101)
0 引言
WHO統計的2016年全球前十位死亡原因中顯示中風排列位居第二,在全球范圍內屬于第二大致死原因,我國是全世界中風發病率最高也是死亡人數最多的國家,因此腦卒中患病后的康復在我國是亟需解決的問題。偏癱患肢運動能動的康復訓練可以看做一種重新學習或重新塑造的訓練過程,高重復性、高強度、目標導向性的訓練(或者功能性任務練習)可以提高患者患側肢體能動能力的恢復[1]。康復訓練機器人即用智能化的機械設備代替醫師高標準、高精度的完成各項康復訓練,提供穩定、可復制、可量化的康復動作,加速受損神經的重塑,并且準確、有效地評估患者恢復情況,有效的減少患者與康復醫師之間的依賴[2],在當前醫護人員逐漸老齡化,青壯年醫護人員后備不足的大背景下大大降低了由于康復治療醫師不足的情況對偏癱患者康復治療造成的影響。
通常患后恢復共需經歷軟癱期、痙攣期、康復期三個過程[3],在各時期分別通過被動訓練、主被動訓練以及主動訓練加以治療,對于患者而言最重要的即為患后初期患肢能動功能的恢復問題,通過被動訓練科學的運動設計,全面的對患肢各部位進行運動刺激,穩定、緩慢的帶動患肢做周期性運動,能夠高效的促進患肢的能動功能的再次建立。
國外對外骨骼機器人的研究始于20世紀60年代。蘇黎世聯邦理工學院在2006年研制出了一種具有七個主動自由度和三個被動自由度的上肢康復機器人,并命名為ARMin系列[4],該機器人由一個升降裝置進行支撐,通過升降機構的調整能夠實現外骨骼初始高度的微調以適應不同體型的患者。美國亞利桑那州立大學在2005年研制了一種具有五個自由度的上肢康復機器人,并命名為RUPERT[5,6],該機器人主要創新點為人工氣動肌肉驅動,相較于其他方式驅動,該方法對患肢具有更好的柔順性,并在控制系統的復雜程度上進行了大大的改進。德克薩斯大學奧斯汀分校在2017年研制出了一種具有左右均為七自由度的雙臂上肢康復機器人,命名為Harmony[7,8],每個關節均由伺服電機所組成的串聯彈性執行器驅動,結合機械設計,該機器人具有廣泛的運動空間范圍。
國內哈爾濱工業大學的王東巖、李慶玲等人研制出了基于sEMG上肢動作辨識的五自由度上肢康復機器人[9,10],控制系統采用測量四處上肢肌體表面的肌電信號sEMG作為反向傳播神經網絡控制信號對機器人進行控制,后來研制了改進的七自由度上肢外骨骼機器人[11],深入研究了sEMG信號-關節角度間的預測算法,提取五個部位的信號作為算法輸入值,以隨機森林算法進行sEMG-關節運動角度預測,較之前有更快的反應速度。華中科技大學研制了基于氣動肌肉驅動的三自由度上肢康復機器人,采用拮抗肌對的方式實現單關節的雙向運動,后來研制出了基于人工氣動肌肉和鋼絲繩驅動的九自由度上肢外骨骼康復機器人[12]。
國內外研究的外骨骼機器人多為單臂外骨骼,通過力信號、肌電信號、腦電信號[13~16]等技術對患者運動意圖進行預測并做出相應動作,但大多研究成果由于分類器的局限性只能實現有限的幾組動作,對于偏癱患者來說,只有患側參與訓練無法直觀的反饋訓練效果。為解決上述問題,設計了一種針對偏癱患者的人機交互上肢外骨骼機器人[17,18],在被動訓練全面的康復基礎上通過人機協作的主被動訓練,利用肢體與關節接觸面的力傳感器獲取運動意圖并對機械臂進行微調從而帶動患肢進行針對性訓練[19],不僅加強了患者主動意圖的感知反饋,更加有利于神經系統的重塑,提高康復效率,大大增加了患肢運動范圍與靈活性,并能時刻使患者通過自身的感覺感受康復訓練效果。因此本文研究著重于人機交互的主被動訓練方法。
以下部分將介紹主從式上肢外骨骼的結構設計、運動學與動力學建模以及控制設計[20]。
1 上肢外骨骼康復機器人
針對人體上肢的運動規律建立外骨骼模型并設計了五自由度上肢外骨骼機器人,分為肩關節的外展/內收、大臂俯/仰、肘部屈/伸、小臂內旋/外旋以及手腕外展/內收運動,為了防止訓練過程中由于關節過運動導致人體受到傷害,在大臂俯仰關節、肘部旋轉關節、肘部屈伸關節以及末端抓手設置限位開關,并且將各關節的運動范圍進行設置:肩關節的外展/內收0°~90°/0°~45°;大臂俯、仰各0°~45°;小臂內、外旋各0°~45°;肘部屈/伸0°~90°/0°~20°;腕關節屈/伸各0°~45°,由于患者患肢可能為左側或右側,因此針對以上兩類患者設置“左主右從”和“右主左從”兩種不同的機型,以右臂癱瘓左臂健康患者為例,上肢外骨骼康復機器人整體結構如圖1所示。

圖1 上肢康復外骨骼機器人整體結構
主從臂的設置能夠實現從健康側到患側康復訓練動作的映射,而從臂還具有傳感與驅動裝置,能夠實現被動訓練,本文著重于被動訓練過程中的人機交互訓練研究。以從臂被動訓練為例各關節驅動方式與結構如圖2所示,其中(a)表示手部關節驅動結構,手柄通過電機A的轉動帶動患者腕關節的屈伸,根據人體腕關節活動范圍設定相應的限位開關,防止手腕受到過運動帶來傷害;(b)表示肘關節驅動結構,由一般人體模型得知手掌距肘部距離在35cm左右,因此圖中電機B能夠帶動整個小臂繞肘關節轉動;(c)、(d)與(e)所示為小臂內外旋驅動結構,由皮帶首末端與彎軌兩端固定,中部通過兩個導向輪與電機C固連的轉輪結合,當電機運行時,通過皮帶傳動使彎軌轉動,從而實現小臂的內外旋;(f)為大臂俯仰驅動結構,通過電機D實現大臂在90°范圍內實現俯仰運動;(g)與(h)為肩關節內外旋驅動結構,通過電機E實現肩部在90°范圍內的回轉運動。

圖2 從臂各關節結構
通過上肢外骨骼機器人從臂D-H參數表,在MATLAB環境[21]下使用robotics toolbox工具箱建立連桿模型,并進行基于五次多項式插值算法的運動控制研究,通過SolidWorks導出的urdf文件,將連桿模型獲得的數據在Simulink環境下進行可視化仿真[22,23]。
2 機器人模型建立與運動仿真
2.1 運動學分析
由于上肢外骨骼機器人左右機械臂對稱,因此只以從臂為例分析其運動學模型[24,25]。以機器人懸梁臂為基坐標,將各關節坐標系原點位置置于每個關節的末端,通過D-H建模方法對肩關節、大臂、肘關節以及手腕進行建模,并得到各關節間的變換矩陣且基座標到末端抓手坐標變換矩陣A為:

其中,變換矩陣T將關節坐標系原點建立在關節的末端,由D-H法得到變換矩陣一般表達式如下:

式(2)中,di表示平移距離,αi表示扭轉角,ai表示長度,θi表示關節角度,其中各關節D-H參數以及關節質量如表1所示。

表1 上肢外骨骼機器人從臂D-H參數和關節質量
由關節變換矩陣的一般表達式以及各關節D-H參數可得基座標到末端抓手的坐標變換矩陣為:

其中:

2.2 動力學分析
通過拉格朗日動力學方程,建立如下機械臂動力學模型:

2.3 機器人模型建立與可視化仿真
由上肢外骨骼機器人從臂參數,建立改進D-H坐標系,五個關節均為轉動關節,肩部旋轉關節和大臂俯仰關節配合肘部屈伸關節確定末端抓手的參考位置,肘部旋轉關節和手腕旋轉關節配合確定手腕的方位,模型如圖3所示;將運動學分析得出的結果,通過MATLAB的toolbox工具箱建立連桿仿真模型,通過各關節的活動范圍各取30000個離散點得出如圖4所示的機械臂末端工作區間散點圖。
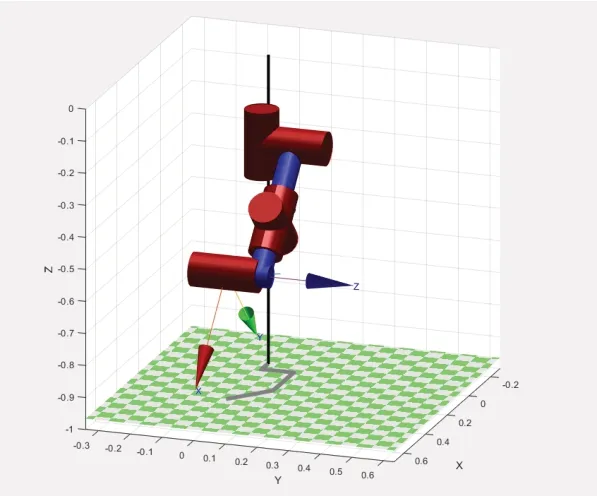
圖3 機械臂連桿模型

圖4 末端工作空間散點圖
得到末端工作空間后,以擴胸運動為例在工作區間內選取合適的工作點作為該動作的起始點,通過逆運動學算法獲取起始點機械臂的姿態,應用urdf文件導入Simulink,配置相關參數,將選定的姿態信息導入到Simulink獲得擴胸動作的可視化模型,如圖5所示。

圖5 機械臂內收初始姿態與內收姿態
3 五次多項式插值算法
機器人的關節空間軌跡規劃的基本思路是使用逆運動學計算方法,將笛卡爾空間中的路徑點轉換成對應的關節角,然后使用插值點計算方法,對關節型機器人的各個關節計算插值點,使機器人的各個關節同步且柔順地到達目標點[26]。對于不同應用場景,空間軌跡規劃可通過多項式、S曲線、3次B樣條等插值算法實現,在中風偏癱患者軟癱期,上肢外骨骼訓練康復機器人的主要任務是恢復患者的能動功能,在單次訓練過程中,患者手臂完全按照醫師設定的固定動作進行重復性運動,由于該階段患者上肢較為虛弱,機械臂的運動應全程平緩完成,對角速度以及角加速度要有一定的要求,五次多項式插值算法能夠從角度、角速度以及角加速度三個層面約束機械臂的運動軌跡,因此本文著重研究五次多項式的插值算法。
五次多項式的角位移、角速度以及角加速度表達式如下:

帶入軌跡起始點和終止點設定的時間、角度、角速度以及角加速度可得:

將上述方程組進行求解,得出五次多項式常數項的解:

4 基于人機交互的外骨骼路徑規劃
4.1 被動訓練模式的路徑規劃
為了完成機械臂牽引患肢康復訓練的任務,通過插值算法對機械臂軌跡進行設計,由于患肢康復初期,各關節能動能力未知,因此需要針對患肢各關節進行恢復性功能訓練,在確定患肢各關節能動功能恢復以后再進行完整的手臂組合運動。以一組擴胸運動為例,在人體模型擴胸運動過程中確定幾個空間關鍵點,針對空間點進行軌跡規劃,其中單關節訓練與擴胸動作共選取八個點位,分別完成單關節功能測試(由初始位姿進行大臂橫擺、大臂俯仰以及手腕正旋逆旋運動)和各關節配合的組合動作,最終回到初始位姿完成一組訓練,其中,各動作的空間起始點、關節角度以及末端位姿如表2所示。

表2 各動作的空間點、關節角度與末端位姿
通過上述八個點,對機械臂軌跡運動進行仿真,并將機械臂末端把手經過的路徑進行記錄,先后完成大臂橫擺、大臂俯仰、回位、手腕正逆旋以及擴胸動作,仿真結果如圖6所示。

圖6 機械臂末端路徑點
機械臂末端掃過的路徑由各關節軸轉動配合實現,其中,在上述單關節功能測試與多關節組合動作時五個關節角度及角速度變化如圖7所示。

圖7 單關節測試及手臂組合動作位置、速度圖
4.2 基于人機交互下的路徑規劃
在單次訓練過程中,患者手臂完全按照醫師設定的固定動作進行重復性運動,結束軟癱期進入痙攣期后,由于患者已具備一定的能動能力,期望康復訓練不僅限于醫師設定的固定動作,因此在訓練過程中加入人機交互,在原有的運動基礎上,在人體上肢與幾個主要關節接觸點裝有力傳感器并在訓練過程中持續獲取人與機器人的交互力,當傳感器采集到的交互力信號超過設定值時,通過角位移、角速度與角加速度傳感器獲取當前機械臂狀態,通過幾個力信號對人的調整意圖進行分類并預測出下一空間工作點,通過當前工作點與動態信息到預測點信息進行軌跡規劃并控制機械臂實現調整反饋,流程如圖8所示。

圖8 主動交互流程圖
以單關節測試過程中的肘部旋轉調整兩個訓練階段兩種調整意圖進行仿真,分別為擴胸動作及大臂俯仰調整,其中,單關節測試及組合動作位置、速度圖效果如圖9所示。

圖9 單關節測試過程中肘部旋轉調整時的關節位置、速度圖
為了驗證該控制方法的有效性,在如圖10所示的被動訓練的擴胸動作過程中手臂按壓到位于肘部屈伸關節軸處的力傳感器,超過設定閾值后控制器得出了大臂上仰調整意圖的結論,使得大臂俯仰關節上仰了一定角度,與圖11所示仿真結果比對無誤。

圖10 擴胸運動始末點位姿狀態圖

圖11 擴胸動作過程中大臂俯仰調整時的關節位置、速度圖
5 結語
本文基于偏癱患者康復訓練需求設計了一種五自由度同型同構主從外骨骼上肢訓練康復機器人及控制方法,通過MATLAB建立了剛體樹模型進行控制研究,并配合urdf可視化模型進行了仿真驗證。康復初期通過被動訓練可以完成設定的康復訓練動作,在康復中期通過人體與關節點接觸面上安裝的力傳感器采集到的人機交互信息實時獲取患肢的運動意圖,自動實現相關關節角度與速度的細微調整,當力傳感器獲取的信息消失后根據當前外骨骼位姿與當前進行的環節,通過插值算法確定剩余訓練動作所需的軌跡點,繼續完成后面的動作。該方法能夠在偏癱患者訓練過程中實時檢測到患肢與機器人之間的信息交互并對意圖進行分類,并控制機器人按照患者的運動意圖進行調整,并在調整后繼續剩余動作。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45