基于ABB搬運工業(yè)機器人離線編程與仿真研究
2022-12-14 10:24:24田小龍王國章
科技風 2022年34期
田小龍 王國章
河北機電職業(yè)技術學院 河北邢臺 054000
工業(yè)機器人具有自動化程度高、生產率高、運行可靠等優(yōu)點,同時隨著人力的成本越來越高,工業(yè)機器人取代工人進行生產成為一種趨勢。在制造業(yè)中,將工業(yè)機器人應用于數(shù)控加工中,大大提高了數(shù)控設備效率,工業(yè)機器人成為制造業(yè)重要的生產工具[1-2]。工業(yè)機器人由程序控制,準確高效的程序編制尤為重要。目前,國內外大多數(shù)采用示教器在線編程。示教器在線編程過程中,工業(yè)機器人生產線上設備必須停工,導致設備利用率低,造成資源浪費;同時工業(yè)機器人的操作煩瑣,操作不慎將導致機器人與工件、夾具等產生碰撞,造成機械手、工件和夾具損壞。高效安全編程成為工業(yè)機器人重要的研究課題[3-8]。采用虛擬機器人和工作站仿真平臺離線編程,機器人的操作更便捷,可以很清楚地觀察機器人的運動情況,當機械手、物料和夾具碰撞時,調整機器人位置,優(yōu)化路徑,在虛擬環(huán)境中不會造成因操作不慎產生碰撞損失。工業(yè)機器人離線仿真驗證可以優(yōu)化程序。離線編程實現(xiàn)最優(yōu)路徑編程,提供了一種方便、安全、高效編程。
1 機器人虛擬工作站創(chuàng)建
完整準確的虛擬工作站搭建是離線編程與仿真的基礎,根據(jù)工業(yè)機器人應用場合搭建相應虛擬工作站。工業(yè)機器人廣泛應用于搬運、裝配、焊接、激光加工和精雕領域。下面以ABB工業(yè)機器人碼垛為例介紹虛擬工作站創(chuàng)建,在軟件RobotStudio中搭建虛擬工作站。
1.1 虛擬工業(yè)機器人創(chuàng)建
工業(yè)機器人是機電產品,包括機械本體、電氣系統(tǒng),機器人基座、下臂、上臂和手腕構成機械本體。在虛擬仿真平臺中,機器人基座、下臂、上臂和手腕各部分裝配一個整體本體。在軟件RobotStudi中有各種型號機器人模型庫,根據(jù)機器人應用場合在機器人庫中選擇相應型號機器人本體導入即可,機械人本體創(chuàng)建很便捷。電氣系統(tǒng)包括控制系統(tǒng)和驅動系統(tǒng),控制系統(tǒng)由控制器、機器人操作系統(tǒng)OS、功能安全系統(tǒng)、示教器等軟件和硬件組成;驅動系統(tǒng)由配電保護系統(tǒng)、驅動器等硬件組成。機器人電氣系統(tǒng)控制器和驅動器等設計相當復雜,但是在虛擬仿真平臺中不需要設計,只要新建系統(tǒng)即可。根據(jù)工業(yè)機器人應用場合導入相應機器人模型和新建系統(tǒng),在虛擬工作站創(chuàng)建虛擬工業(yè)機器人。通過軟件中自帶虛擬示教器操作工業(yè)機器人,完成相應動作操作。
1.2 虛擬現(xiàn)場創(chuàng)建
機器人虛擬現(xiàn)場包括工作場所、工作臺和生產線等創(chuàng)建。工作臺、輸送鏈、柵欄和置料垛盤等復雜三位模型實體創(chuàng)建是虛擬現(xiàn)場創(chuàng)建難點,通過UG、pro/e等三維軟件建模。在搬運工作站中簡單機器人位置墊料和物料等簡單模型在RobotStudio中直接建模,在軟件中按照實際工作需要將三維模型擺放到合適位置即可完成虛擬現(xiàn)場創(chuàng)建。機器人的墊料、產品源(物料)、示教源(物料)、吸盤、工業(yè)機器人(4軸ABB IRB4600)、輸送鏈、置料垛盤、柵欄、機器人控制柜、傳感器和機器人控制系統(tǒng)組成工業(yè)機器人碼垛。

圖1 工業(yè)機器人搬運工作站Fig.1 the industrial robot handling workstation
1.3 虛擬動態(tài)效果創(chuàng)建
創(chuàng)建虛擬工作場景。在虛擬工作站中,存在產品不斷復制,輸送鏈運輸產品,機械手抓取和釋放產品等運動狀態(tài)。通過不同傳感器檢測相應信號控制各種運動狀態(tài)。虛擬動態(tài)效果建立是虛擬工作建立關鍵點和難點,通過RobotStudio中Smart組件創(chuàng)建。在Smart組件中通過添加組件、屬性與連接、信號和連接建立動態(tài)效果。
1.3.1 輸送鏈動態(tài)效果的創(chuàng)建
在實際自動碼垛生產線上,存在物料在輸送鏈運輸?shù)倪\動狀態(tài)。在虛擬工作站中創(chuàng)建輸送鏈輸送產品動態(tài)效果,使用Smart組件創(chuàng)建一個動態(tài)輸送鏈。在創(chuàng)建Smart組件中,添加圖形拷貝組件source,選擇物料作為拷貝對象;添加對象隊列組件queue,將物料復制品作為queue隨著輸送鏈運動;添加線性移動組件linearMove,將隊列中的復制品按照直線運動,因此目標是queue,方向是復制品移動的方向,速度是復制品移動的速度;添加檢測對象組件PlaneSensor,并安裝在傳送鏈末端,作用是檢測運動到輸送鏈末端物料,傳感器檢測到物體,傳送鏈停下來,屬性中Origin、Axisl、Axis2是傳感器PlaneSensor所在的位置和大小,SensedPart是檢測到的物體,此處為空,信號Active置1,傳感器一直起作用。通過源對象選擇source、源屬性選擇Copy、目標對象選擇Queue和目標屬性選擇Back的屬性連接,實現(xiàn)了物料產生一個復制物料,復制物料作為下一個輸送對象,隨著輸送鏈運動。設定輸送鏈輸入和輸出信號,進行信號連接。給定輸送鏈數(shù)字輸入信號,組件source復制一個物料,組件queue將物料自動加入隊列傳送,復制物料運動到輸送鏈末端,當傳感器PlaneSensor傳感器PlaneSensor檢測到復制物料,Queue退出隊列動作,復制物料停止在輸送鏈前端動態(tài)鏈接。
1.3.2 夾具動態(tài)效果的創(chuàng)建
機器人搬運物料時,頻繁執(zhí)行抓取和釋放動作。在虛擬工作站中建立工具抓取和釋放動態(tài)效果,使用Smart組件創(chuàng)建一個夾具動態(tài)效果。在創(chuàng)建Smart組件中,添加檢測物料組件線傳感器LineSensor,并安裝在吸盤工具上,作用是檢測物料;添加組件Attacher,作用是抓取物料;添加組件detacher,作用是釋放物料。屬性連接將傳感器檢測到物料作為抓取對象,釋放時將抓取對象作為釋放對象。信號連接,給定吸盤輸入信號,線傳感器檢測到物料,組件Attacher抓取物料,組件detacher釋放物料動態(tài)連接。
輸送鏈和夾具smart組件的輸出信號作為機器人的輸入信號,將機器人的輸出信號作為smart組件的輸入信號,輸送鏈、吸盤夾具和機器人建立動態(tài)連接。
2 運動路徑規(guī)劃與編程
工業(yè)機器人通過程序控制,按照最優(yōu)路徑執(zhí)行動作,完成相應任務。在編制工業(yè)機器人程序前,首先規(guī)劃最優(yōu)運動路徑。
2.1 運動路徑規(guī)劃
根據(jù)機器人在虛擬工作站中完成任務及空間規(guī)劃最優(yōu)路徑,避免機械手和工作臺、工件等碰撞,規(guī)劃最優(yōu)路徑應在機器人到達范圍內。工業(yè)機器人工作場合和任務不同,運動路徑不同。搬運工作站規(guī)劃路徑思路,規(guī)劃安全點,抓取高度點,抓取基準點,放置高度點,放置基準點,垛盤放置位置點。通過MovL、MovJ或MovC等插補指令,實現(xiàn)TCP從一節(jié)點向下一節(jié)點運動,避免運動過程中出現(xiàn)奇異點,實現(xiàn)規(guī)劃路徑編輯。

圖2 動作流程圖Fig.2 the action flow chart
2.2 離線編制
RobotStudio自帶USER和BASE系統(tǒng)模塊,控制ABB機器人系統(tǒng)。在虛擬工作站中,根據(jù)規(guī)劃路徑,用虛擬示教編制用戶應用程序。編程之前首先新建各種類型數(shù)據(jù),建立實際位置點(pActualPos)、安全點(pHome)、抓取基準點(pPick)、放置基準點(pPlaceBase)和垛盤放置位置點(pPlace)為robtarget數(shù)據(jù)類型;建立碼垛充滿(bPulletFull)為bool數(shù)據(jù)類型;建立垛盤物品初值(nCount)num為數(shù)據(jù)類型;建立抓取工具吸盤(tGripper)為tooldate數(shù)據(jù)類型。其次,創(chuàng)建裝有吸盤工具坐標,根據(jù)吸盤重量和重心創(chuàng)建工具坐標;輸送鏈和垛盤工件坐標,利用三點示教法進行創(chuàng)建;根據(jù)物料載荷確定有效載荷。在編程時選擇工具坐標、相應的工件坐標和有效載荷,根據(jù)規(guī)劃路徑,通過虛擬示教器操作確定各個軌跡點位置。在搬運不同階段,采用不同速度,搬運過程中選擇合適速度,大大提高搬運效率。在抓取物料高度點到放置物料高度點之間運動時,采用較高速度。編制main主程序、初始化程序、抓取程序、放置程序,完成對物料的搬運。

圖3 程序流程圖Fig.3 the program flow chart
3 模擬仿真
將程序模塊導入RobotStudio中,對編制程序進行仿真,模擬整個搬運完成情況。通過仿真結果對機器人軌跡中不良的位置進行檢查和修改,保證機器人運動的有效性,并可以對工具坐標的速度、加速度、奇異點或軸超限問題等進行優(yōu)化,提高效率; 檢查工業(yè)機器人路徑是否規(guī)劃路徑一致,若發(fā)生機械手和物料工作臺碰撞,調整運動軌跡,優(yōu)化離線編程。在RobotStudio創(chuàng)建虛擬工作場景中,仿真工業(yè)機器人搬運10次物料碼垛2層的搬運,仿真結果達到搬運要求,如圖4所示。
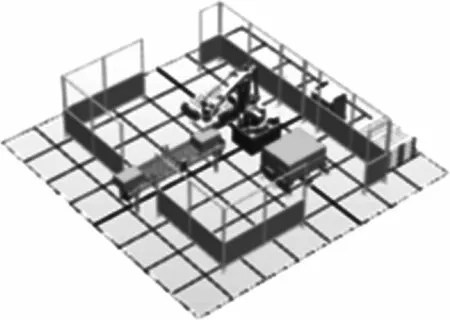
圖4 搬運仿真圖Fig.4 the transport simulation diagram
結語
在RobotStudio中,搭建出能模擬一個逼真的工作場景動態(tài)工作站,規(guī)劃搬運路徑,設計動作流程,根據(jù)搬運設計要求編制相關程序。圖形仿真優(yōu)化路徑,避免碰撞和優(yōu)化程序,達到最優(yōu)效果。搬運機器人搬運物料離線編程和仿真增加了編程的直觀性,提高了效率,提供了優(yōu)化程序途徑,為機器人編程和調試創(chuàng)造了安全靈活的環(huán)境。機器人搬運物料應用非常廣泛,ABB搬運機器人離線編程為機器人搬運物料問題的解決提供了一種思路和參考。
