基于WPT和BP神經網絡的轉轍機故障診斷方法研究
2022-12-14 10:22:54郭文玥馮慶勝
大連交通大學學報 2022年5期
郭文玥,馮慶勝
(大連交通大學 自動化與電氣工程學院,遼寧 大連 116028)
轉轍機作為改變道岔開通方向的動力設備,對保障列車安全運行具有重要的作用.由于轉轍機的工作環境大部分處于室外,晝夜溫差和惡劣天氣都可能影響轉轍機的正常工作.目前轉轍機主要利用微機監測系統采集的電流或功率信號設定閾值來判斷是否發生故障,該方法靈活性低、漏判率高.于是加入人工篩查進行二次判斷,導致實時性差、效率低,不能形成系統的、智能的維護維修規劃.
目前,國內外學者對轉轍機故障診斷進行了一定程度的研究,采用的方法也是各有特色.Zhou等[1]雖然根據專家的經驗知識得到了部分特征,但無法對主成分分析過程進行控制,可能提取不到有效特征.李嘉鵬等[2]采用小波-包絡解調方法提取特征,雖然實現了復合特征的分離提取,但缺乏信號的高頻信息.Atamurada等[3]采用專家系統進行故障診斷,設定規則較少,對一些相似信號無法區分.張旭等[4]利用小波分析和主成分分析法進行特征提取和數據降維,該方法需經兩步提取特征,煩瑣耗時.Long等[5]采用哈爾小波提取特征缺乏低頻細節信息.還有通過計算轉轍機電流信號平均值、方差、最大值等相關數值作為特征值,并結合隱馬爾科夫模型[6]、支持向量機[7]、灰色神經網絡[8]等進行故障診斷,這些方法提取的特征缺乏細節信息,且識別率都低于98.5%.王曉煜等[9]采用BP神經網絡進行鋁板結構損傷識別,可以實現對缺陷尺寸的精確定量,且具有較高的穩定性.董昱等[10]驗證了小波包提取故障的有效性,但無法直接進行故障識別.
本文利用小波包變換對轉轍機動作電流信號進行分解重構,得到不同頻率段的能量值,然后將能量值歸一化處理組成特征向量集,輸入經參數調優的BP神經網絡模型,實現轉轍機狀態的智能診斷.
1 轉轍機動作曲線分析
1.1 動作曲線與轉轍機故障間的關系
轉轍機動作曲線一般指轉轍機的工作電流曲線,它的曲線特征代表了轉轍機的各個組成部件的動作狀態、電氣和機械特性.曲線各個階段的異常變化代表著轉轍機動作過程中參與部件可能發生的故障.通過對某個轉轍機動作電流曲線的查詢與分析,可以判斷該轉轍機的工作狀態,及時發現和消除隱患,對列車安全運行有著重要的意義.
1.2 轉轍機正常動作時的電流曲線分析
本文以ZD6型轉轍機為研究對象,在其正常轉換過程中的工作電流曲線,見圖1.

圖1 轉轍機正常動作的電流曲線圖
ZD6型轉轍機的動作過程主要分為四個階段:
解鎖階段(T1-T4):解鎖時間小于等于0.6 s,電動機啟動,通過主軸旋轉帶動鎖閉裝置進行解鎖.T1點1DQJ吸起,轉轍機動作曲線開始記錄;T2-T3,2DQJ轉極,動作電流曲線驟升形成一個尖峰,峰頂值通常為3~7A;T3-T4,電流至峰點后迅速回落到一定值后趨于平滑.
轉換階段(T4-T7):道岔成功解鎖后,鎖閉齒輪和齒條塊動作,帶動尖軌位移至規定位置.該階段電流曲線較為平滑,其轉換時間長短由阻力大小決定.
鎖閉階段(T7-T9):鎖閉時間小于等于0.3 s,尖軌到位后與基本軌密貼,自動開閉器接點自動斷開電動機動作電路,電動機慣性在摩擦帶的消耗下,其動作電流曲線逐漸下滑,最后降為零.
緩放階段(T9-T10):緩放時間大于等于0.4 s,道岔鎖閉后,會形成一段近似為零的曲線.T10點1DQJ落下,轉轍機動作曲線記錄結束.
1.3 轉轍機故障工作時的動作電流曲線分析
根據查閱資料和現場調研,目前ZD6型轉轍機主要有8種常見故障[11],故障詳情如表1所示,對應的電流曲線見圖2.

表1 ZD6型轉轍機常見故障分析

(a) f1啟動電流峰值偏高

(e) f5 鋸齒形電流
2 動作電流曲線的小波包處理
2.1 小波包變換
小波包變換(Wavelet Packet Transform,WPT)是對信號進行更精細、無冗余、無疏漏的一種分析方法,它分解的高低頻信號能在更加細化的頻帶內進行.小波包定義如下,假設信號為y(t),則
(1)
式中:函數系{yn(t)}稱作正交小波包;h(k)為低通濾波器;g(k)為高通濾波器;h(k)和g(k)兩者之間互為正交關系.
2.2 動作電流曲線特征提取
小波包分解的過程可以看作對信號進行濾波,每層分解由一組高通濾波器和一組低通濾波器實現,在對信號進行處理時,每次分解產生的所有信號均參與下一層的分解,使得轉轍機動作曲線每一個頻段的信號都能得到全面的表征,提取的特征能更好地反映轉轍機的動作過程.具體步驟如下:
(1)對原始信號進行N層小波包分解,得到2N個不同頻帶的分解系數,對得到的所有高低頻分解系數進行小波包重構,重構系數表示為SN,k(k=0,1,…,2N-1),計算每個頻帶的小波包能量值:

(2)
式中:ti-1-ti是該頻帶信號的起止時間.
(2)考慮到信號的部分頻段的能量可能會過大,因此將對每個頻帶的能量進行歸一化處理,得到歸一化值pN,k:
(3)
將現場采集到的原始動作電流信號進行三層小波包分解,通過MATLAB分解、重構,得到各頻段信號能量值,組成信號故障特征向量,即
(4)
正常狀態(用f0表示)和8種常見故障狀態信號小波包分解重構得到的故障能量值見表2.可以看出,當轉轍機發生故障時,某些頻帶的能量值(如f3、f4、f7)與正常狀態頻帶的能量值(f0)相差很大,但是有些不同的類型(如f0、f1、f5等),其頻帶能量值的分布很相似,無法直接看出轉轍機的具體故障,因此選用BP神經網絡模型進行故障分類.

表2 正常狀態與故障狀態小波包分解能量值
利用MATLAB歸一化函數mapminmax對故障特征向量處理得到BP神經網絡的輸入.
3 故障診斷
3.1 故障診斷系統流程
轉轍機故障診斷系統主要由電流特征提取和故障診斷兩部分組成,故障診斷系統結構圖見圖3.

圖3 故障診斷系統結構圖
3.2 BP神經網絡的構建
構建三層BP神經網絡模型,設計輸入層為歸一化得到的故障特征集的個數為8個神經元;輸出層為不同故障類型目標輸出為9個神經元;隱含層神經元個數的確定參考如式(5)[3]:
(5)
式中:m,n分別為輸入、輸出層神經元個數;a為0~10之間的常數.
對BP神經網絡的各層函數進行調整尋優,最終確定輸入層和隱含層傳遞函數采用tansig函數,隱含層和輸出層采用purelin函數,神經網絡參數訓練采用trainlm函數.
4 仿真及結果分析
利用鐵路現場采集到的ZD6型轉轍機動作電流數據進行實驗,其動作一次時間為5 s,系統每隔0.04 s采集一次數據,采集點125個.選擇樣本數據3 600組,其中2 160組為訓練樣本,720組為驗證樣本,720組為測試樣本,各類型樣本數量見表3.

表3 模型訓練及測試數據集表
采用db3小波基對原始樣本數據進行分解,得到第三層8個小波包系數重構信號,見圖4.可以看出,S3,0小波系數的幅值最大,與表2中E3,0能量值最高相一致.

圖4 小波包變換重構信號
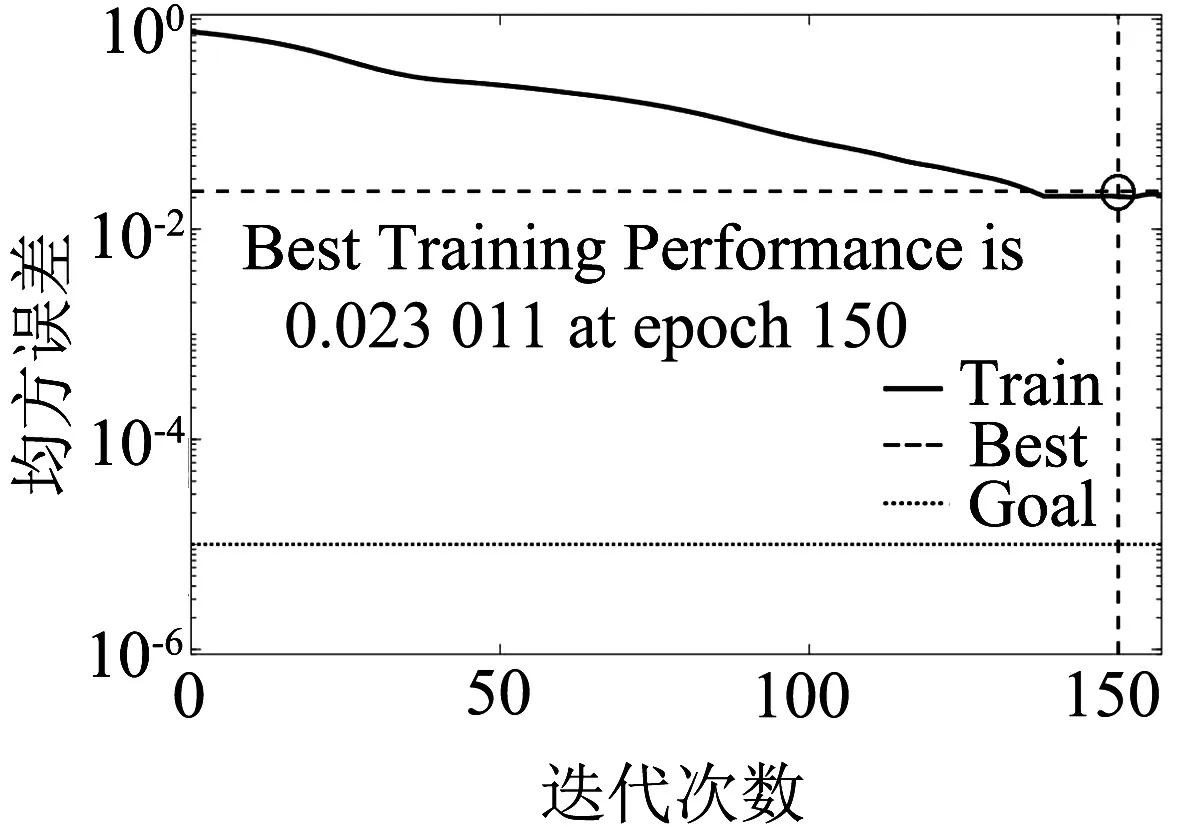
根據構建的神經網絡,設定訓練迭代次數為2 000次,訓練目標最小誤差為1×10-5,學習速率為0.01.經訓練、驗證和測試,為隱含層神經元為9時,模型的均方誤差最小.采用不同模型參數和不同特征提取方法的訓練迭代次數和均方誤差曲線見圖5.若采用文獻[1]tansig+tansig+traingdx函數訓練(圖5(a)),BP神經網絡訓練迭代次數為150步,此時診斷的準確率為95.9%;采用PCA-WT提取特征(圖5(b)),迭代次數為105步,診斷準確率為98.0%.若采用文獻[3]tansig+logsig+trainlm函數訓練(圖5(c)),迭代次數為270步,此時診斷的準確率為83.8%;采用HAAR小波提取特征(圖5(d)),迭代次數為97步,診斷準確率為98.3%.若采用文獻[4]在時域上的道岔轉換狀態提取特征(圖5(e)),迭代步數為129步,診斷準確率為97.8%.本文選用小波包提取特征和尋優后tansig+purelin+trainlm函數(圖5(f)),迭代次數為79步,此時診斷的準確率為99.3%.由于測試集數據多,分類結果過于集中,故選擇其中部分數據的分類結果進行展示,見圖6.
(a)tansig+tansig+traingdx

圖6 預測集樣本部分數據分類結果
分類結果中,f1(啟動峰值偏高)、f5(鋸齒形電流)被識別為f0(正常電流),f6(自動開閉器不靈活)被識別為f8(鎖閉電流超標),通過能量值分布可以看出,這幾種分布結果很接近,導致模型識別錯誤.
采用不同函數參數BP神經網絡的測試結果見表4,采用其他特征提取方法的測試結果對比見表5,可以看出本文采用小波包進行故障特征提取和經過調整尋優后的BP神經網絡相結合的方法,迭代次數最低、故障診斷準確率最高,能夠滿足鐵路現場故障診斷的需求.

表4 不同神經網絡函數結果對比

表5 不同特征提取方法的結果對比
5 結論
本文利用小波包變換提取轉轍機動作電流特征值,該方法得到了信號的時頻域聯合分布信息,即不同時間和頻率的能量值分布,相比直接提取時域特定參數值更能反映原始信號的突變信息,將得到的特征向量經尋優調整后的BP神經網絡模型診斷后,準確率達到了99.3%,能夠滿足鐵路現場維護的需求.由于ZD6型轉轍機動作曲線與ZDJ9、S700K等轉轍機動作曲線具有一定的相似性,因此本文研究方法亦適用于這些類型的轉轍機故障診斷.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
