基于SWARM 的山地城市干線調控優化方法
2022-12-20 12:36:46榮曉楠蔡曉禹王玉婷
華東交通大學學報 2022年6期
關鍵詞:優化
榮曉楠,譚 靜,蔡曉禹,彭 博,王玉婷
(1. 山地城市交通系統與安全重慶市重點實驗室,重慶 400074; 2. 重慶交通大學交通運輸學院,重慶 400074)
山地城市路網連通性較弱, 交通分布不均衡,導致山地城市干線成為城市交通系統的主動脈。 城市干線系統是山地城市道路網絡的生命線,承擔著山地城市主要交通出行量, 交通流特性差異大,但山地城市干線道路開口分布不均且一般無輔道,交織復雜,管控難度大。
干線協調控制一般是以交通系統運行效率最大為控制目標,通過全面掌握交通規律來實現協調控制,主要分為定時控制、感應控制及自適應控制。
在定時控制方面,最早由Morgan 等[1]提出雙向綠波信號協調控制的設計方法。 Little 等[2]提出的MAXBAND 模型。隨著研究的深入,Chenu 等[3]在博弈論的基礎上提出了干線綠波協調并行算法。 荊彬彬等[4]提出了雙周期干線綠波信號協調控制模型。王殿海等[5]通過優化經典數值算法對綠波帶寬度進行改進。 龍科軍等[6]建立了基于限速和干線綠波的控制模型。 曲大義等[7]以延誤最小為目標的相位差,建立了干線協調控制相位差優化模型。 王晨宇等[8]提出非公共周期的干線協調控制模型。
感應控制研究方面,大多為單點感應控制方法研究。宋現敏等[9]基于邏輯規則,提出了感應協調控制下綠燈時間實時優化方法。何必勝等[10]提出具有“要”“搶”, 跳相功能的公交優先預信號感應控制的方法。張蕾等[11]運用模糊控制理論對感應控制進行配時優化,提出一種感應控制的優化方法。顧鴻儒等[12]提出一種基于層次顏色Petri 網的交叉路口的信號燈動態配時控制模型。 張帥鵬等[13]提出一種基于NEME編號和合流相位的跳相序感應控制策略,實現相位的動態組合。
干線自適應協調控制現階段仍不夠成熟,國內外的干線自適應控制系統主要有SCATS[14],SCOOT[15],RHODE[16],OPAC[17]等。國內學者也進行了相關研究。 楊義軍等[18]提出了基于排隊長度的單點自適應信號控制方法。 常玉林等[19]基于相鄰相位所在方向進口道流量關系制定的模糊規則集得出,以實現干線協調下的單點自適應控制。 杜鵬程等[20]基于ALINEA 控制方法,構建了快速路入口匝道信號控制算法及銜接交叉口信號優化算法。
總體而言,干線協調控制的控制目標主要分為綠波帶最寬和延誤最小兩大類。 目前國內外大部分的協調控制研究均在幾個交叉口共用同一信號周期的條件下進行優化,然而,該方法在流量波動較大的交通狀態下會產生時空資源的浪費,且研究成果多用于平原城市。 適用于山地城市的干線系統的協調管控還需要進一步研究。
本文提出一種在軌跡數據驅動下的基于SWARM 優化算法的山地城市干線多車道匯入系統協調管控方法。 SWARM 算法在協調控制層SWARM1 是通過預測交通流來識別道路瓶頸點,以預防交通擁擠; 在單點信號控制層SWARM2 是利用局部檢測器檢測交通流數據確定匝道調節率,該算法能較好的利用快速路、道路交叉口及匝道的交通流檢測設備。 通過對復雜交織區、多路合流等干線關鍵節點建立多點位的協調管控方法,并應用到干線系統, 可進一步提升干線及干線毗鄰區域的交通效率,緩解城市道路交通壓力。
1 算法簡介
1.1 SWARM 算法
20 世紀90 年代末, 美國國家工程技術公司聯合加州交通運輸局共同研發的控制算法——全系統自適應匝道控制系統(SWARM)。
SWARM 算法是基于交通流密度的匝道實時控制算法,包含兩種不同管控層面的匝道控制算法,即管控系統多匝道協調控制層SWARM1, 常規的單點信號控制層SWARM2, 分別從兩個層面求解匝道調節率, 再選取二者中較小值作為系統應用的最終入口匝道調節率,該算法技術路線如圖1 所示。
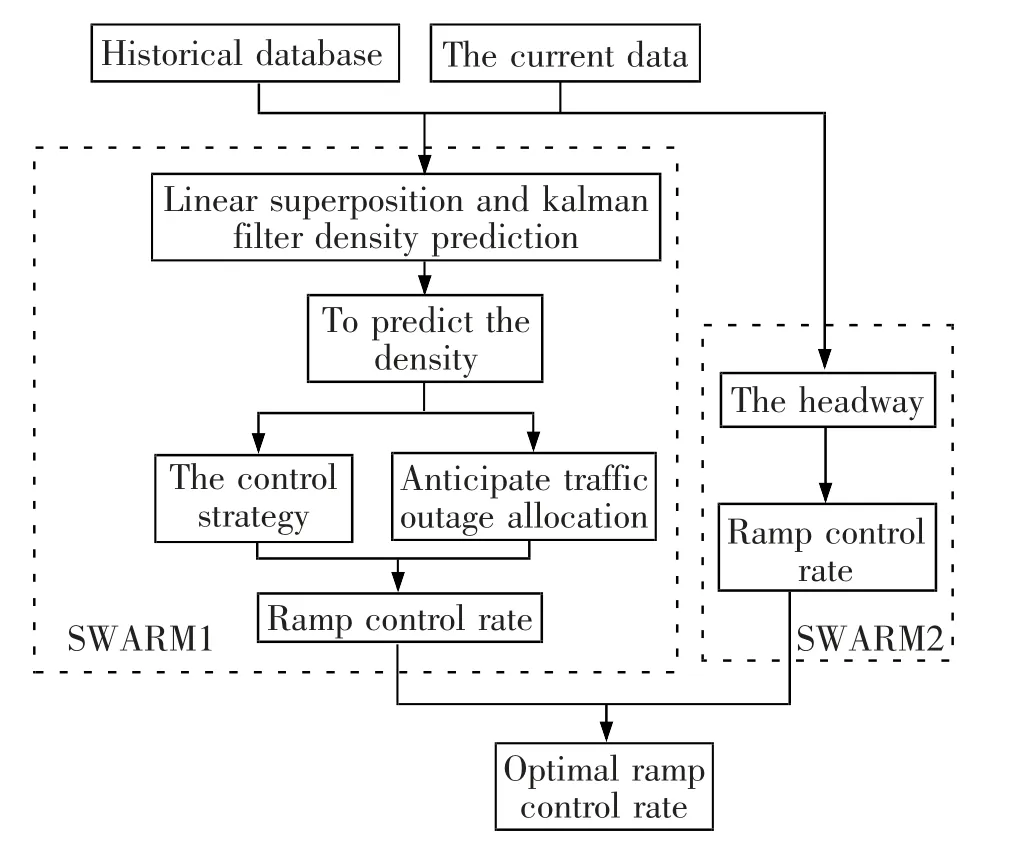
圖1 SWARM 控制算法技術路線Fig.1 Technical route of SWARM control algorithm
SWARM 算法是通過預測的交通流量數據來計算匝道調節率,故保證SWARM 算法的控制效果精準的預測模型和全面的OD 數據是算法關鍵。 該算法存在一定的缺點。
1) 需要準確的預測模型;
2) 需要大量的實際交通流和OD 數據;
3) 需要設置大量的車輛感應裝置,以便獲取精準的實際路網交通數據,實施成本較高;
4) 模型是靜態的,在計算匝道調節率的過程中忽略了一些動態因素。
1.2 SWARM 優化算法
針對山地城市干線多車道匯入節點交織區秩序混亂、通行效率低下、擁堵易發等特點,本文將原有的SWARM 控制算法進行如下改進。
1) 山地城市干線多車道匯入系統是間斷流和連續流的混合交通流系統,其由高速路、城市快速路、主干道等城市不同等級道路組合而成,不同等級道路的交通流特性區別較大,且匝道和主線的交通功能在某些節點中相似,僅對匝道進行協調控制無法有效解決干線系統的交通擁堵,據此本文提出考慮將主線和匝道同時作為控制對象來解決這一弊端。
2) 在SWARM1 部分, 改進了基于歷史交通密度數據的調節率分配權重計算。 本文通過獲取大量RFID 數據所記錄的車輛移動信息,根據軌跡OD 數據追溯擁堵源頭,以此精確控制干線及入口匝道流量匯入權重。
3) 在SWARM2 部分, 本文引入分層遞階反饋單點優化控制,考慮干線和銜接交叉口對入口匝道的影響,結合影響區控制目標來確定干線和匝道的調節率。
SWARM 優化控制算法技術路線如圖2 所示。

圖2 SWARM 優化控制算法技術路線Fig.2 Technical route of SWARM optimized control algorithm
2 基于SWARM 優化算法的協調管控
2.1 基于子區延誤的擁堵溯源調控方法2.1.1 基本思路
在SWARM 優化算法的SWARM1 部分提出了基于子區延誤最小的擁堵源頭追溯的干線協調控制方法。 根據歷史交通軌跡數據還原城市干線系統的交通OD 規律,追溯瓶頸路段產生擁堵的源頭,確定上游主線和匝道匯入干線瓶頸路段的流量比例,最終結合控制子區間邊界調節總量[21]和控制目標(延誤約束)計算主線和匝道的調節率[22]。
2.1.2 模型建立
1) 基于擁堵源頭追溯的主線和匝道匯入權重確定。 控制子區調節總量按比例分配至上游節點的主線和匝道,該比例值的確定是通過追溯干線瓶頸路段的擁堵源頭來完成[23]。 提取控制子區內所有出入口的RFID 數據,從歷史RFID 數據中提取干線系統車輛的移動信息, 并按照車輛ID 和行車方向對數據進行排序,還原車輛在控制子區內的OD 信息。根據OD 信息追溯瓶頸路段車輛的源頭,確定權重

式中:Fi為i 子區主線的權重;fij為i 子區第j 個節點匝道的權重;Qi(k)為i 子區主線交通需求;qij(k)為i 子區第j 個節點k 時段時匝道的交通需求;Qioff(k)為i 子區主線由出口匝道流出的總量;qijoff(k)為i 子區第j 個節點k 時段入口匝道由出口匝道流出的總量。
2) 控制目標確定。 在協調管控方案中,多采用單因素作為管控目標。 路網的交通運行效率主要通過車均延誤或車均停車次數這兩種指標來表征,車均延誤和車均停車次數是協調管控目標函數中的關鍵指標,尤其是車均延誤,是目標函數中使用得最為廣泛的指標,且被證明為最經濟有效的指標之一[24]。 故本文的目標函數也采用了控制子區內部各控制點位總延誤最小。

式中:Dsij為i 子區內第j 個節點的主線延誤;Drij為i子區內第j 個節點的入口匝道延誤; 由于主線和匝道的道路等級或者道路功能的差異,主線和匝道的延誤對路網會產生不同程度的經濟影響,故引入α,β 分別代表主線和匝道的經濟效益系數(具體取值根據實際路網情況確定)。
許多學者對欠飽和、近飽和和過飽和狀態的延誤模型進行綜合分析研究,提出了綜合延誤模型[13],該模型的延誤計算主要由兩部分組成:正常相位延誤D1,隨機延誤和過飽和延誤D1,即

式中:q′為車輛到達率;C 為控制節點的信號周期時長,s;λ 為車道綠信比;x 為車道飽和度。 正常相位延誤D1的計算模型與韋伯斯特延誤模型相同,隨機延誤和過飽和延誤D2用過飽和溢出車輛數N0和飽和度x 的乘積表示。

其中

式中:X 為飽和流量;Ge為有效綠燈時間。
延誤主要與車輛到達率、 周期和綠信比相關,而某節點主線的車輛到達率q′sij(k)與通過上游控制點位的車流量,即上游控制點位主線和匝道的調節率有直接關系。

其中,當上游節點主線控制手段為黃閃,即不做管控時, 主線調節率等于上游節點主線交通需求,即Sij(k)=Qij-1(k);同理,當上游節點匝道不做管控時,匝道調節率等于該匝道交通需求,即rij(k)=qij(k),某節點的匝道交通量到達率q′rij(k)與單位時間到達匝道的交通流量相等。
為保證干線綠波行駛,假設多車道匯入點控制周期時長相同,且不設全紅時間,則

式中:λ 為綠信比;Y 為各相位臨界車道的交通流量比之和;yv為某相位臨界車道的交通流量比;v 為相位編號;g 為相位數;qv為該相位車流量;h 為相位控制的車道數;ys,yr分別為主線和匝道控制的臨界車道交通流量比;Xs,Xr分別為主線和匝道的車道飽和流量。
3) 調節率計算。當瓶頸處的剩余通行能力大于到達瓶頸處的車流量時,該子區內部主線和匝道都不需要做流量調控,即到達瓶頸處車流量與瓶頸處的剩余通行能力的差值Δik≤0 時(變量),該子區內部不需要進行協調管控。

匝道和主線的調節率是根據子區內瓶頸處的通行能力、匝道和主線的流量需求以及基于擁堵源頭追溯確定主線和匝道匯入多車道控制點位的權重來計算。 到達瓶頸處的車流量由兩部分組成:該子區內最靠近瓶頸處的有主線控制的節點y 的主線通過流量和該控制點匝道及下游匝道的流量。 再根據擁堵源頭追溯確定主線和匝道的調節率,且上游節點的管控會影響下游節點的車輛到達率,從而影響車輛延誤。

式中:Ci(k)為i 子區瓶頸處通行能力;Ri(k)為i 子區調節總量;Sij(k),rij(k)分別為i 子區第j 個節點在k 時段的主線和匝道調節率;Δik 為i 子區內在k時段主線和匝道需要減少的交通總量;Qij(k),qij(k)分別為節點j 主線和匝道在k 時段的流量需求;lsj,lrj分別為節點j 主線和入口匝道排隊車輛數。
在實際應用時,若非干線達到極度擁堵,否則都選取3~4 veh/min 作為匝道最小調節率, 當調節率小于3 veh/min 時, 排隊等待的車輛會錯誤認為調節信號出現了問題而出現闖紅燈的違規駕駛行為,導致控制效果不佳。
2.2 基于分層遞階反饋的單點控制方法
山地城市干線交通系統相對復雜, 由高速路、快速路和城市道路多等級道路組成,故山地城市干線交通系統中的交通管控涉及到3 個層面的交通流控制,即干線交通流、入口匝道交通流與入口匝道銜接的交叉口匯入匝道的交通流。 由于各等級道路的交通流運行規律相差較大,若將三者統一建模求解,將造成模型參數繁雜,模型復雜,且約束條件苛刻,難以求解的問題。 故在SWARM2 部分提出基于分層遞階反饋的單點控制方法[25]。
2.2.1 基本思路
本文基于分層遞階反饋思想, 從兩方面入手建立單點控制模型:考慮主線和匝道的相互影響,及考慮匝道和銜接交叉口的相互影響。 在SWARM2 部分的基于分層遞階反饋的單點控制方法思路如下。
1) 分布式計算:綜合考慮的主線交通流和匝道交通流變化,計算主線和匝道的初步調節率,同時,考慮銜接交叉口與入口匝道的相互影響求解銜接交叉口匯入匝道的流量;
2) 啟發式目標:確定單點控制的管控目標。 即以主線和匝道的延誤加權之和最小為控制目標;
3) 反饋優化:根據單點控制的管控目標,將主線和匝道的初步調節率進行反饋優化。 單點控制范圍為主線-匝道連接處,匝道,匝道-相接道路連接處及銜接交叉口,如圖3 所示。
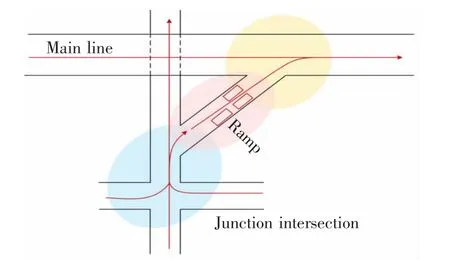
圖3 單點控制范圍示意圖Fig.3 Schematic diagram of single point control range
2.2.2 模型建立
基于分層遞階反饋的單點控制模型建立主要分為如下3 個步驟。
1) 分布式計算。 分層計算的第1 層,主要是通過考慮節點主線下游容量與主線及匝道上游交通需求來計算主線和匝道的調節率。 若主線下游擁堵,為避免主線排隊或通行能力持續降低,應主動減少主線上游或上游匝道的車流駛入主線下游。

式中:Sij(k+1)為i 子區中第j 個節點在(k+1)時段的主線調節率;rij(k+1)為i 子區中第j 個節點在(k+1)時段得入口匝道調節率;Cij(k)為i 子區中第j 個節點在k 時段主線下游通行能力。
單點管控中主線和匝道的調節率同樣存在最大最小值

分層計算的第2 層,通過獲取銜接交叉口與匝道的RFID 數據所記錄的車輛移動信息, 追溯銜接交叉口各進口道匯入匝道的流量比例,求解銜接交叉口匯入匝道的流量。子區內第j 個節點的入口匝道延誤;α,β 分別為主線和匝道的優先權系數(具體取值根據實際路網情況確定)。

3) 反饋優化。為保證山地城市干線系統的交通運行效率最佳, 可通過控制銜接交叉口匯入量,犧牲銜接交叉口的通行能力來降低干線系統的交通壓力。 銜接交叉口匯入匝道總量與匝道調節率存在如下關系。

式中:NijR為該匝道可接受排隊車輛數;lij(k)為k 時段排隊車輛數。
根據以上約束條件, 再結合主線/匝道的調節率計算公式和節點控制目標聯合求解調節率的最優值。
3 案例分析
式中:qi,j,r,on(k+1)為由銜接交叉口匯入匝道的總流量;σx為銜接交叉口編號為x 的進口道匯入比例;qi,j,J,x為第i 子區內第j 個節點的銜接交叉口編號為x 的進口道的交通需求。
2) 啟發式目標。以解決山地城市干線系統常發性擁堵為目標,在節點方面,以節點總延誤最小為控制目標。

式中:Dsij為i 子區內第j 個節點的主線延誤;Drij為i
3.1 研究區域交通特性分析
選擇重慶市機場路 (新牌坊立交-人和立交-東環立交-金渝立交),以及民安大道、人和大道、金渝大道及周邊重要節點構成的影響區兩部分,簡稱為機場路及其影響區, 機場路干線全長約為7.5 km,機場路干線的影響區范圍有14 km2。 研究方向為新牌坊立交至金渝立交的單方向, 研究區域由4 個信控交叉口,3 個多車道匯入點,7 個入口匝道,10 個出口匝道及節點間的相接道路構成。如圖4 所示。

圖4 實證研究區域區位圖Fig.4 Regional map of empirical research
研究區域的交通系統由高速路、城市快速路和主干路等不同等級的城市道路組合而成,如表1 所示。
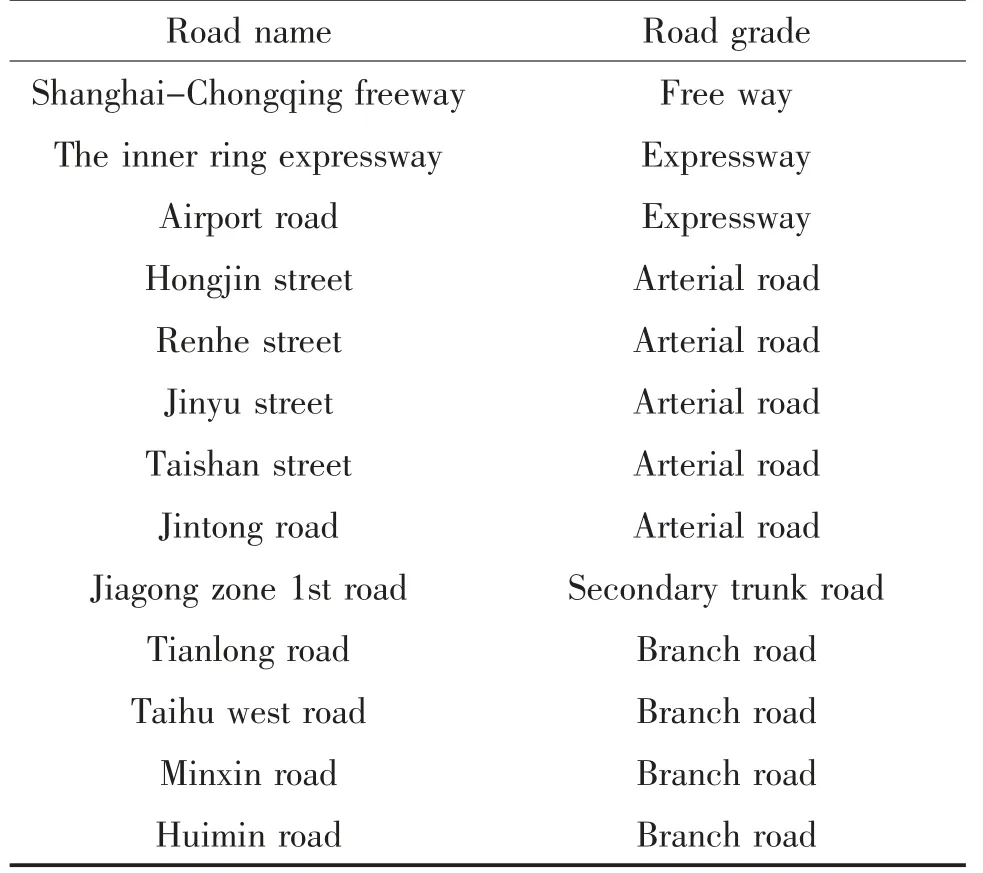
表1 實證研究區域道路等級Tab.1 Empirical study on regional road grade
實例研究區域交通擁堵頻發, 擁堵主要集中在人和立交、東環立交及金渝立交,在晚高峰時段(17:00—19:00) 尤為顯著, 且擁堵持續時間較長,如圖5 所示。 研究區域呈現交通特性差異大、節點間距不均勻、交織區復雜、交通擁堵頻發的特點。

圖5 東環立交區域部分時段交通狀態Fig.5 Traffic conditions of east ring interchange area in some periods
3.2 研究區域仿真模型建立
本研究需建立基于VISSIM 仿真的重慶市機場路及其影響區路網模型, 在模型中輸入數據包括:道路網絡數據、控制管理數據、交通需求數據、駕駛員-車輛數據。 利用VISSIM 仿真分別試驗了無控制、現行管控與基于SWARM 優化算法的協調控制3 種情景。
基于SWARM 優化算法的協調控制方案中的各子區控制點位主線和匝道的調節率, 見表2、表3。 其中A 為內環快速;B 為滬渝高速;C 為民心路。控制子區Ⅰ僅包含一個控制點位,且為五路環形交叉口,子區內部無需進行協調管控,按SWARM 優化算法調節后的流量設置單點最優管控方案。
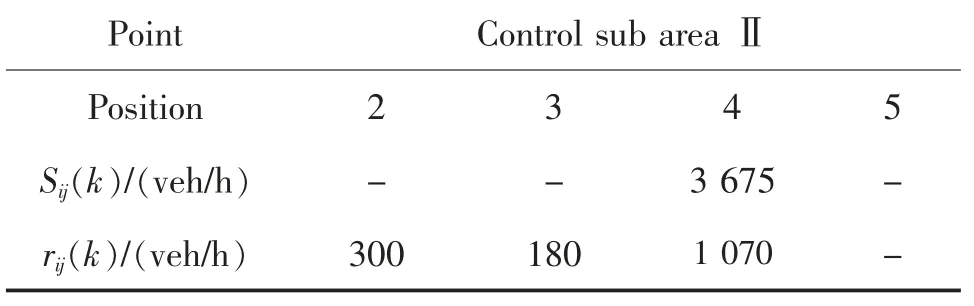
表2 控制子區Ⅱ調節率Tab.2 Regulation rate of control sub area Ⅱ
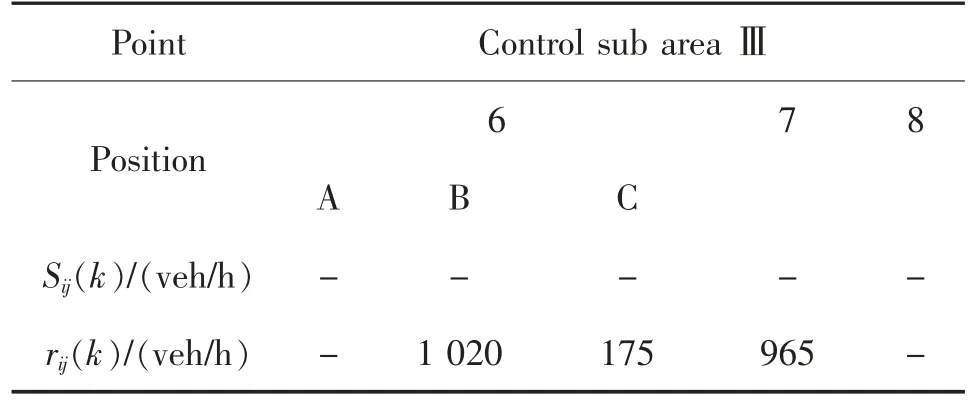
表3 控制子區Ⅲ調節率Tab.3 Regulation rate of control sub area Ⅲ
3.3 控制效果對比
為驗證本文提出的協調管控方法的效果,使用3 種不同的評價方法對3 種情景的管控效果進行分析。
3.3.1 車輛路網評價
VISSIM 中的車輛路網評價功能可輸出整個干線多車道匯入系統中的車輛特征屬性。 而本文在協調管控層面的控制目標為子區延誤最小,故在車輛路網評價中主要選取車輛平均延誤和車輛平均停車次數兩個參數分別對各控制子區和干線多車道匯入控制系統進行評價,評價結果見表4。
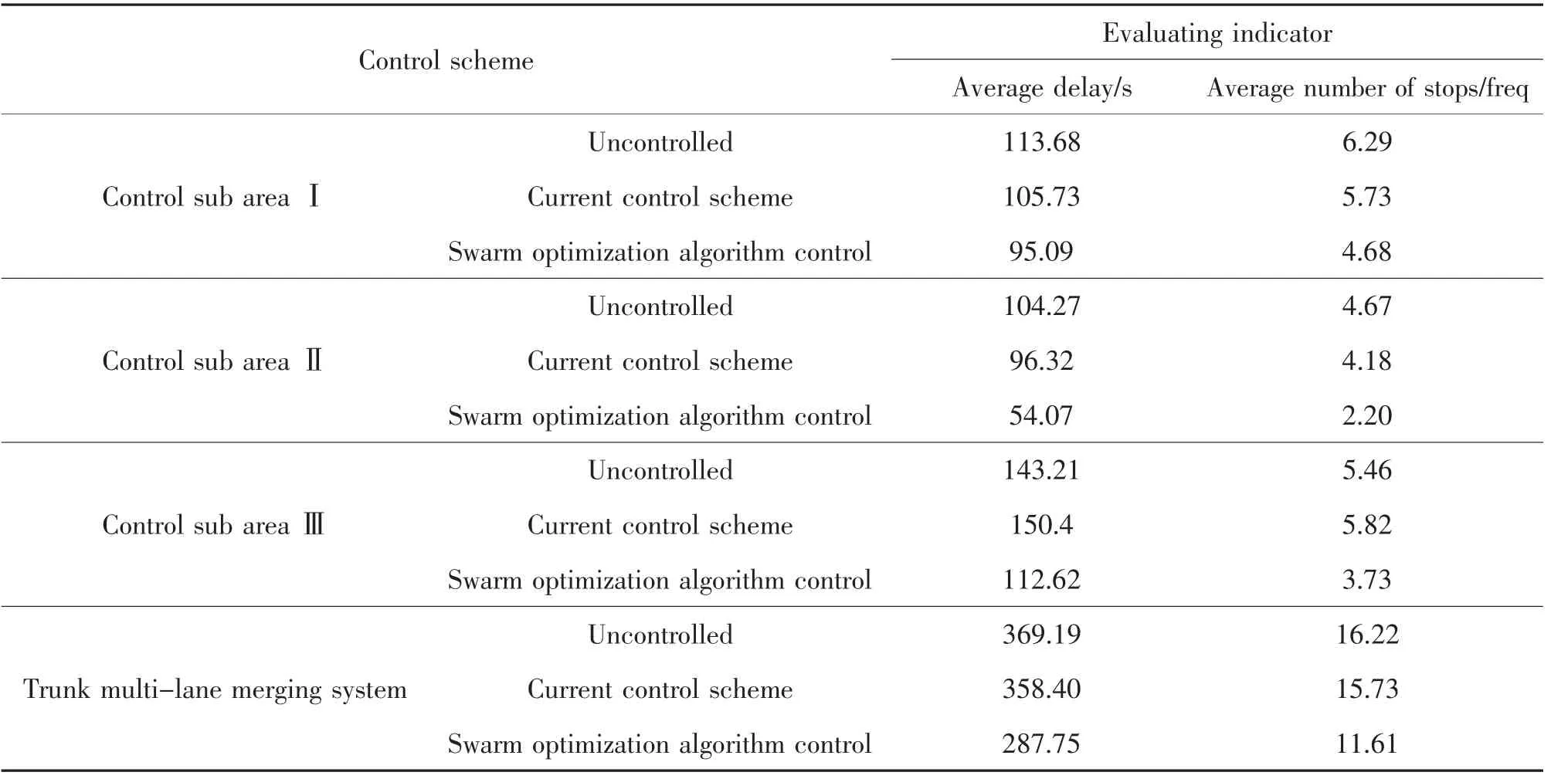
表4 系統交通運行評價結果Tab.4 System traffic operation evaluation results
由表4 可知,現行管控方案的平均延誤和平均停車次數相對于無管控場景的改進較小, 而采用SWARM 優化算法進行控制,對這兩個指標有明顯的改進,針對干線多車道匯入系統而言,這兩個指標分別降低了22.06%,28.42%。
3.3.2 干線車輛行程時間和延誤評價
通過測量控制子區Ⅱ、控制子區Ⅲ及干線多車道匯入系統的干線車輛的平均延誤、平均停車次數和平均行程時間來評價干線的交通運行效果。 由于控制子區Ⅰ僅包含一個控制節點,故不對控制子區Ⅰ中的干線交通運行情況進行評價。在VISSIM 中,從干線設置行程時間測量和延誤時間測量來獲取這3 個指標,其中,該評價方法中的平均延誤和平均停車次數指測量路段的所有被觀察車輛相對無任何干擾情況或無任何信號控制情況來計算平均延誤時間和平均停車次數,故在該評價方法中不再將無管控場景納入對比分析。 控制子區Ⅱ、控制子區Ⅲ及干線多車道匯入系統的干線運行評價結果見表5。
由表5 可知, 采用SWARM 優化算法進行控制,對干線的平均延誤,平均停車次數和平均旅行時間有明顯的改善:針對這3 個指標,SWARM 優化算法相對于現行管控方案,在控制子區Ⅱ中分別降低了28.94%,23.05%,10.06%, 在控制子區Ⅲ中分別降低了24.25%,24.94%,27.96, 在干線多車道匯入系統中分別降低了23.04%,24.08%,19.38%。 總體而言,SWARM 優化算法控制對干線的交通運行效果改善明顯。

表5 干線交通運行評價結果Tab.5 Evaluation results of trunk traffic operation
3.4 緩堵效果評價
利用VISSIM 仿真路段區段評價功能捕獲新牌坊立交-金渝立交的干線車輛特征屬性, 以300 s 為時間間隔記錄每一路段區段(100 m)的平均車速,其中,0~400 m 為控制子區Ⅰ,400~4500 m 為控制子區Ⅱ,4 500~8 200 m 為控制子區Ⅲ。 仿真總時長設置為4 800 s,其中包括1 200 s 的路網預熱時間,3 600 s 的評價數據采集時間。將評價結果用Python進行加工,將每個路段區段在不同時間的速度值用顏色表示(顏色劃分參照交通狀態分級標準[26]),現行管控方案和SWARM 優化算法管控方案的速度時空演變圖見圖7,圖8。
由圖7 和圖8 可知,SWARM 優化算法管控方案相對于現行管控方案能有效緩解部分路段區段的擁堵,在擁堵路段長度和擁堵持續時間兩方面都有較明顯的提升。 如明顯降低了控制子區Ⅲ的擁堵持續時間,提前消散了控制子區Ⅰ的擁堵。
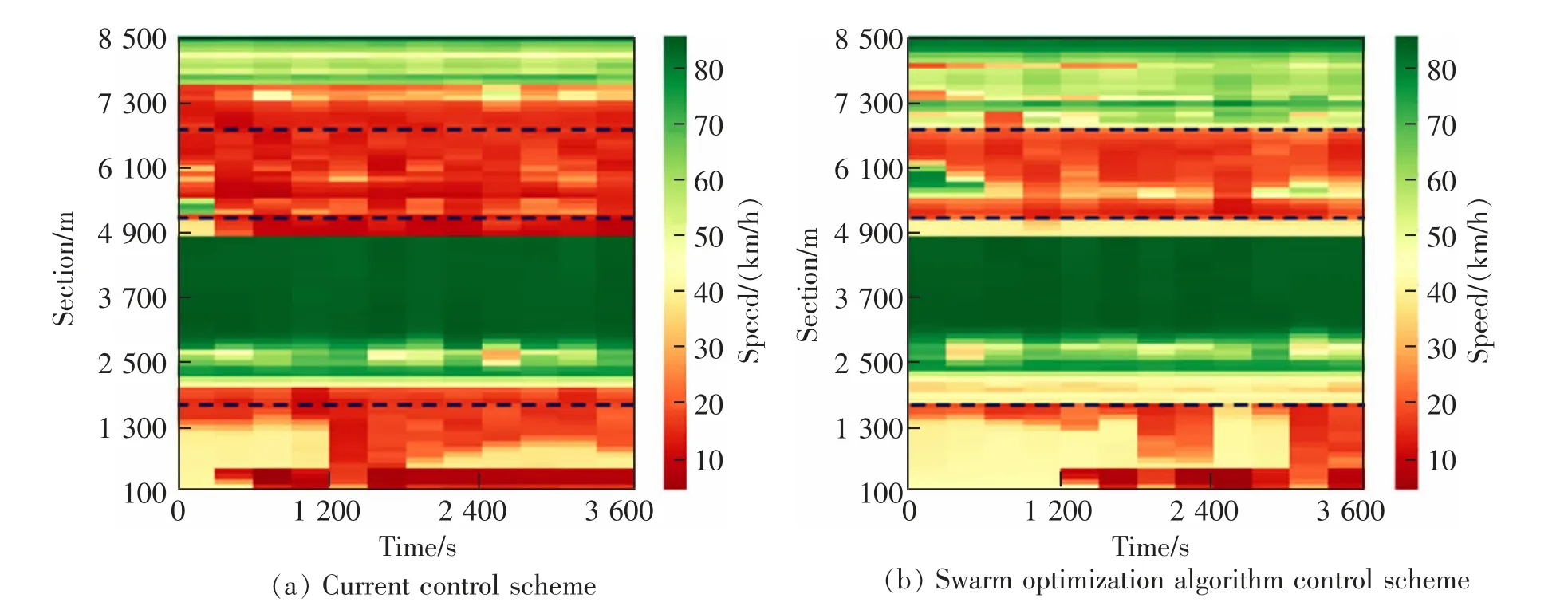
圖7 速度時空演變圖空間維度對比Fig.7 Comparison of spatial dimensions of velocity spatio-temporal evolution diagrams
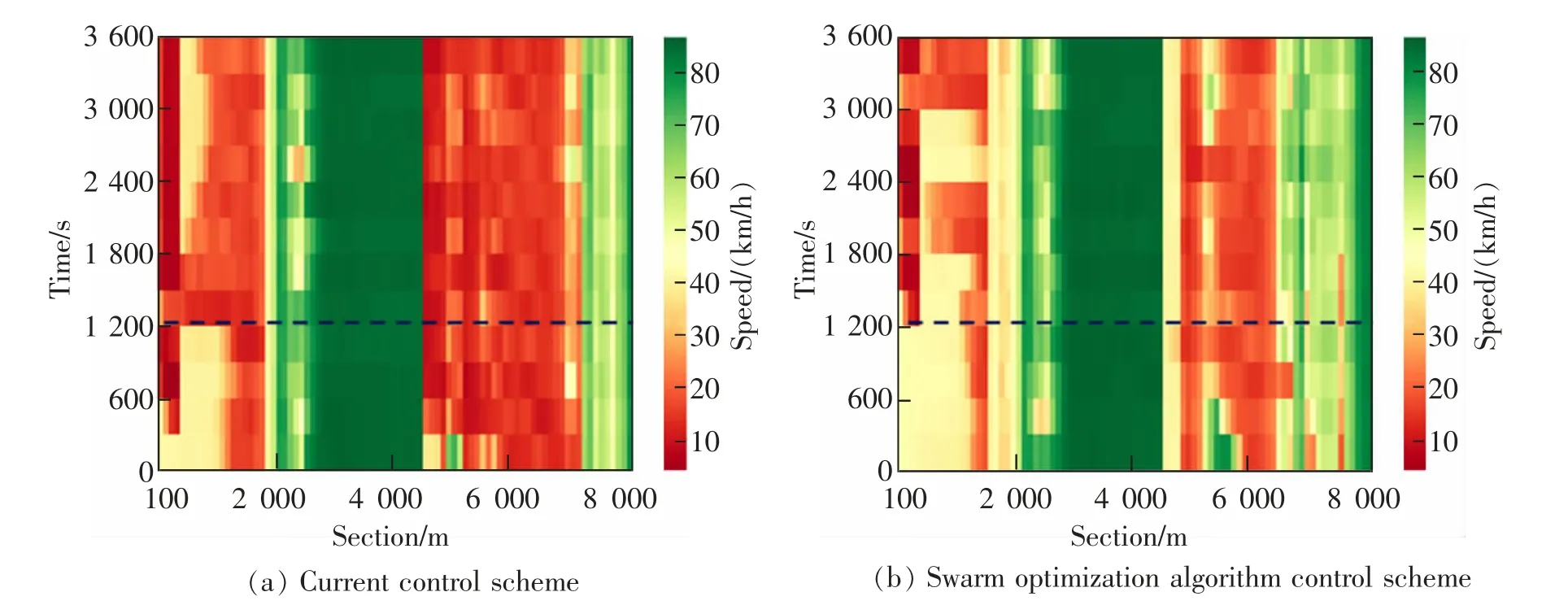
圖8 速度時空演變圖時間維度對比Fig.8 Comparison of the time dimension of the time-space evolution diagram of speed
4 結論
1) 針對實證研究區域,SWARM 優化算法場景相對于無管控場景平均延誤和平均停車次數分別降低了22.06%,28.42%。
2) 針對實證研究區域的干線,SWARM 優化算法場景相對于現行管控場景平均延誤降低了23.04%,平均停車次數下降了24.08%,平均旅行時間則節省了19.38%,且擁堵持續時間和擁堵路段長度都有明顯的改善。
3) 采用SWARM 優化算法對山地城市干線多車道匯入系統進行控制,可有效降低車輛平均延誤,減少停車次數,提升山地城市干線系統的運行效率。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
