用于列車通過噪聲分析的傳聲器陣列優(yōu)化設(shè)計(jì)
2022-12-20 15:43:22詹天宇胡定玉廖愛華
噪聲與振動(dòng)控制 2022年6期
關(guān)鍵詞:優(yōu)化
詹天宇,胡定玉,2,師 蔚,2,廖愛華,2
(1.上海工程技術(shù)大學(xué) 城市軌道交通學(xué)院,上海 201620;2.上海市軌道交通振動(dòng)與噪聲控制技術(shù)工程研究中心,上海 201620)
基于傳聲器陣列的聲成像技術(shù)憑借其可以直觀地反映噪聲分布與貢獻(xiàn)的優(yōu)勢(shì),被廣泛用于汽車、飛機(jī)、列車[1-3]等運(yùn)載工具的噪聲源識(shí)別。目前已發(fā)展出多種算法,如常規(guī)波束形成算法[4]、廣義逆波束形成算法[5]以及DAMAS等多種解卷積算法[6-8]。
在使用過程中,不同的傳聲器分布形式對(duì)于聲成像效果有著很大影響。根據(jù)聲源特性設(shè)置陣列參數(shù)是實(shí)施聲成像技術(shù)的首要任務(wù)。因此,研究陣列參數(shù)影響以及陣列的設(shè)計(jì)與優(yōu)化具有重要意義。
在進(jìn)行列車通過噪聲測(cè)試時(shí),需要考慮列車尺寸大、頻帶范圍寬且頻率較低的特點(diǎn)。列車通過噪聲主要分布在300 Hz~4 000 Hz[9-10]的頻帶范圍內(nèi),其中有一部分聲源頻率較低,因此進(jìn)行聲成像需要用到大孔徑陣列。這就意味著需要大量的傳聲器,測(cè)試成本很高。如何對(duì)陣列進(jìn)行優(yōu)化設(shè)計(jì),減少測(cè)量成本,提升陣列性能是開展列車通過噪聲測(cè)試面臨的一個(gè)實(shí)際問題。
目前,模擬退火算法[11]、粒子群算法[12-15]和遺傳算法[16-19]都可以在不同程度上實(shí)現(xiàn)傳聲器陣列優(yōu)化,但也有各自的優(yōu)缺點(diǎn)。如粒子群算法相對(duì)較簡(jiǎn)單,收斂速度快,但容易進(jìn)入局部最優(yōu),而且粒子群的應(yīng)用場(chǎng)景一般都是連續(xù)性問題。模擬退火算法收斂速度相對(duì)較慢,計(jì)算時(shí)間較長(zhǎng),在有限的時(shí)間內(nèi)難以獲得最優(yōu)解。而遺傳算法是一種能夠有效獲得全局最優(yōu)解的高效方法,與前兩種算法相比,遺傳算法具有更好的適應(yīng)性和穩(wěn)定性,而且遺傳算法可以通過選擇、交叉和變異產(chǎn)生新的個(gè)體,能夠豐富種群的多樣性。文獻(xiàn)[20]中在針對(duì)交通噪聲的傳聲器陣列優(yōu)化中對(duì)于算法的計(jì)算時(shí)間提出了分塊優(yōu)化策略,有效降低了陣列優(yōu)化的計(jì)算時(shí)間。
本文針對(duì)列車通過噪聲分析中存在的問題,研究傳聲器陣列優(yōu)化算法。首先介紹了聲成像技術(shù)的基本原理以及陣列的性能指標(biāo),然后介紹了陣列優(yōu)化算法及實(shí)施流程,最后通過與常用類型陣列進(jìn)行比較,分析了優(yōu)化陣列的性能。
1 理論基礎(chǔ)
1.1 常規(guī)波束形成原理及聲陣列性能指標(biāo)
常規(guī)波束形成原理如圖1 所示,聲源面被等距離劃分成N個(gè)網(wǎng)格點(diǎn),S個(gè)非相干點(diǎn)聲源在網(wǎng)格點(diǎn)上離散分布。
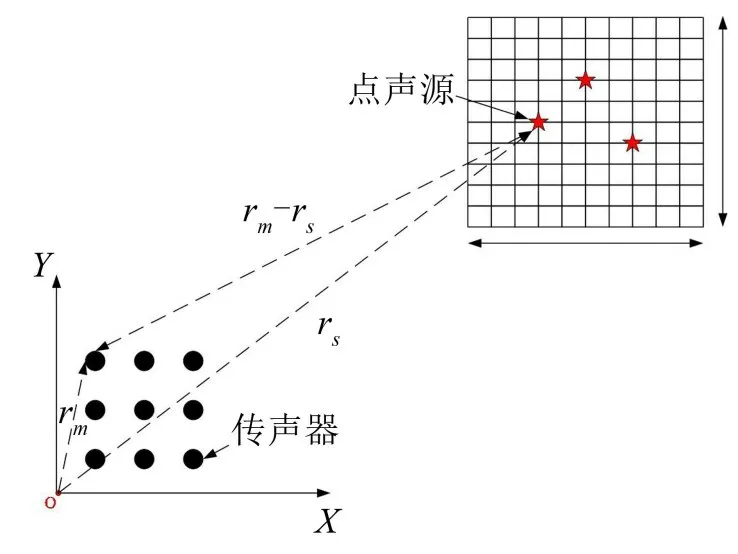
圖1 基于平面陣列的傳統(tǒng)波束形成示意圖
常規(guī)波束形成輸出結(jié)果如式(1)所示:

式中:Cpp為聲壓互譜矩陣,wn為導(dǎo)向向量,如式(2)所示:
式中:gn=[g1,n,g2,n,…,gM,n]H為聚焦點(diǎn)rn(n=1,…,N)到傳聲器位置的傳遞函數(shù)。
其中:gm,s=exp(jk‖rm-rs‖)/4π‖rm-r‖,j 為虛數(shù),k=2πf/c是波數(shù),rm(m=1,…,M)為傳聲器陣列坐標(biāo),rs(s=1,…,S)為聲源坐標(biāo)。
常規(guī)波束形成輸出結(jié)果實(shí)際上是聲源源強(qiáng)與陣列響應(yīng)之間的卷積,如式(3)所示:

式中:x是聲源源強(qiáng),A是點(diǎn)擴(kuò)散函數(shù)(Point spread function,PSF),即陣列響應(yīng)。陣列響應(yīng)在很大程度上決定了常規(guī)波束形成輸出結(jié)果。其中PSF如式(4)所示:

當(dāng)陣列形狀確定時(shí),陣列性能由固有的陣列響應(yīng)決定。通過優(yōu)化陣列排布,可以提升陣列性能。傳聲器陣列的最主要性能[21]主要體現(xiàn)在陣列響應(yīng)的分辨率、有效動(dòng)態(tài)范圍兩方面,陣列的性能直接決定了基于傳統(tǒng)波束形成方法的聲源識(shí)別能力。其中,陣列的空間分辨率的評(píng)價(jià)指標(biāo)為陣列響應(yīng)中的主瓣寬度,主瓣寬度越窄,陣列的空間分辨率越好,噪聲源識(shí)別的精度越高。有效動(dòng)態(tài)范圍定義為陣列響應(yīng)中最大旁瓣水平相比較于主瓣峰值的差值,動(dòng)態(tài)范圍越大,陣列響應(yīng)的旁瓣水平越低,干擾越小,噪聲源識(shí)別的準(zhǔn)確性更好。兩者相互制約,因此,在陣列優(yōu)化時(shí)要綜合考慮,在降低旁瓣水平的同時(shí)保證較窄的主瓣寬度。
1.2 基于遺傳算法的陣列優(yōu)化
陣列優(yōu)化時(shí)主要考慮主瓣寬度和最大旁瓣水平兩個(gè)性能參數(shù)。其中,較低的旁瓣水平對(duì)聲成像結(jié)果中的旁瓣抑制和聲源精確定位起決定性作用,由傳聲器陣列的幾何分布決定。因此將主瓣值與最大旁瓣水平之差作為優(yōu)化的目標(biāo),該差值定義為PSMMLL(Peak Side Minus Max Lobe Level)。該優(yōu)化算法的目標(biāo)函數(shù)如式(5)所示:

式中:f為頻率,范圍是300 Hz~3 000 Hz,Rm是傳聲器的位置向量。
每個(gè)傳聲器的位置由兩個(gè)方向的坐標(biāo)定義,未知參數(shù)的數(shù)量為傳聲器個(gè)數(shù)的兩倍。優(yōu)化過程中參數(shù)變量的翻倍會(huì)導(dǎo)致優(yōu)化算法的復(fù)雜性增加,增加計(jì)算時(shí)間并影響最優(yōu)解的準(zhǔn)確性。因此,該算法只優(yōu)化了部分傳聲器的位置,而其他傳聲器位置由優(yōu)化部分位置通過幾何旋轉(zhuǎn)獲得。這種做法保證了傳聲器陣列的整體不規(guī)則布置。如圖2 所示,傳聲器陣列被分為4組,每組傳聲器結(jié)構(gòu)相同,每組由前一組逆時(shí)針旋轉(zhuǎn)90°獲得。
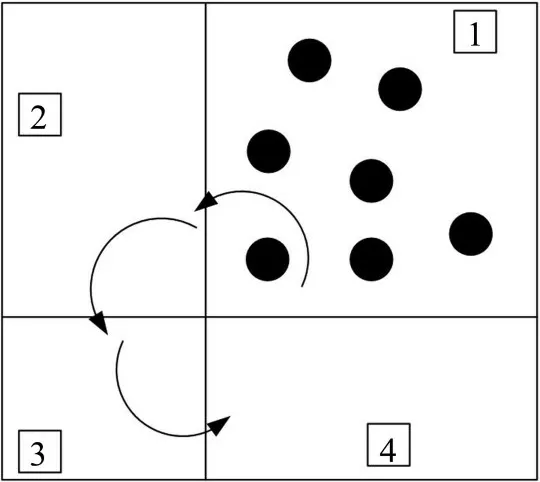
圖2 傳聲器布置方法示意圖
通過該方法,傳聲器位置優(yōu)化數(shù)量減少為原來的1/4。如果優(yōu)化過程中考慮整個(gè)陣列所有的傳聲器,而不是其中一組,傳聲器間距的重復(fù)次數(shù)將進(jìn)一步減少。只優(yōu)化組1的陣列排布能在沒有大幅度影響算法性能的前提下提升算法效率。
確定目標(biāo)函數(shù)后,需要在優(yōu)化算法中加入約束條件:第一個(gè)約束條件為傳聲器陣列的孔徑,該約束條件決定分析頻率范圍中的下限頻率。第二個(gè)約束條件為傳聲器之間的間距,該約束條件決定了分析頻率范圍的上限頻率。
如圖3 所示,優(yōu)化算法流程圖中第一步是陣列編號(hào)和初始化設(shè)置,將10×10等間距的100個(gè)正方形柵格點(diǎn)位置點(diǎn)編碼為1~100,作為種群的所有染色體,并從中隨機(jī)選取M個(gè)染色體組成初始個(gè)體,對(duì)應(yīng)優(yōu)化模型中的陣列,再隨機(jī)抽取N次,則產(chǎn)生一個(gè)種群。此外,為了降低計(jì)算的復(fù)雜度,本文選擇5個(gè)頻率進(jìn)行分析,分別為500 Hz、1 000 Hz、2 000 Hz、2 500 Hz 和3 000 Hz。優(yōu)化算法模型與傳聲器陣列的對(duì)應(yīng)關(guān)系如表1所示。
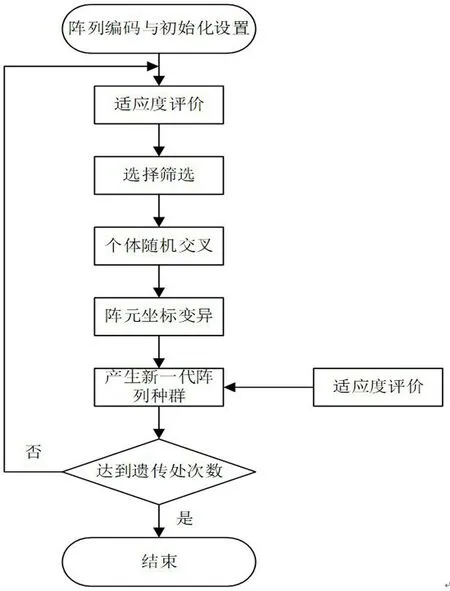
圖3 優(yōu)化算法流程圖
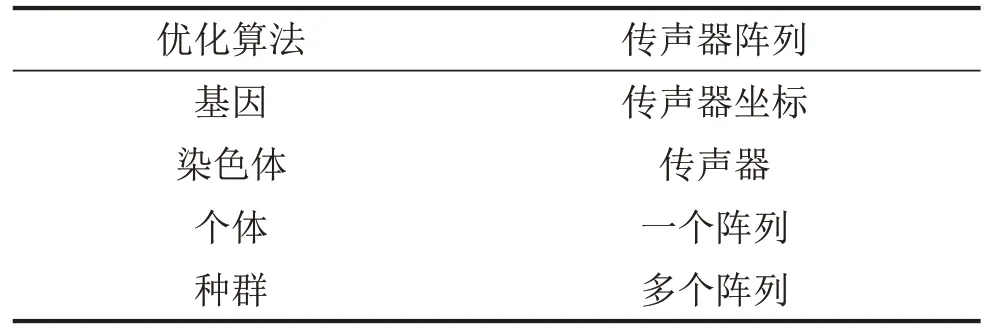
表1 優(yōu)化算法模型與傳聲器陣列對(duì)應(yīng)關(guān)系
第二步是適應(yīng)度評(píng)價(jià),對(duì)初始種群中的個(gè)體進(jìn)行適應(yīng)度計(jì)算,并按照適應(yīng)度對(duì)初始個(gè)體進(jìn)行排序。第三步是選擇篩選,通常采取截?cái)噙x擇法得到參與交叉的父代,即根據(jù)適應(yīng)度排序選出前50%的初始傳聲器位置作為交叉變異的父代。
交叉是種群中產(chǎn)生新個(gè)體(陣列)的主要方式,其操作是在染色體(傳聲器)層面進(jìn)行的,兩個(gè)父代之間隨機(jī)交換一條或多條染色體(傳聲器),從而產(chǎn)生新的個(gè)體(陣列)。變異操作是對(duì)一個(gè)傳聲器位置或多個(gè)傳聲器位置按照概率進(jìn)行隨機(jī)改變,產(chǎn)生新的傳聲器位置。一般變異的概率設(shè)置得比較小,只有少數(shù)的傳聲器位置會(huì)因?yàn)樽儺惗淖儭W儺悢?shù)量所對(duì)應(yīng)的概率分布如式(6)所示
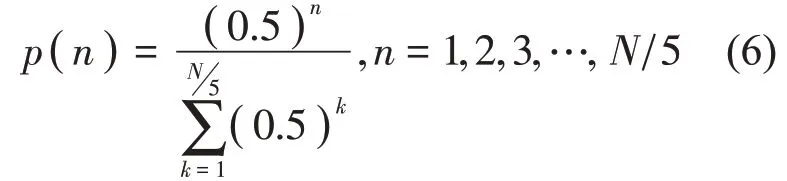
其中,最大變異數(shù)量設(shè)置為N/5,N為全部傳聲器個(gè)數(shù)。
完成選擇、交叉、變異后,重新進(jìn)行適應(yīng)度評(píng)價(jià),一直重復(fù)該過程,直到達(dá)到定義的最大迭代次數(shù),這個(gè)值由經(jīng)驗(yàn)準(zhǔn)則確定。本文設(shè)置迭代次數(shù)為1 000次,迭代完成后,使用PSMMLL 值最大的一組傳聲器位置作為優(yōu)化陣列。
2 仿真實(shí)驗(yàn)
2.1 仿真設(shè)置
對(duì)36個(gè)傳聲器的稀疏陣列進(jìn)行優(yōu)化,參數(shù)設(shè)置如表2所示。
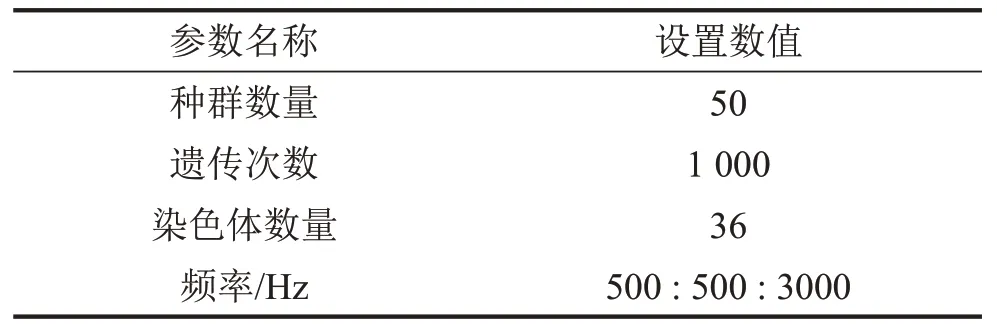
表2 仿真參數(shù)設(shè)置
根據(jù)優(yōu)化算法得到的傳聲器陣列位置如圖4所示。為了比較優(yōu)化陣列的聲源識(shí)別性能,將獲得的陣列性能結(jié)果與4 層同心圓陣列和多臂螺旋陣列[22]進(jìn)行比較,其陣列布置如圖5(a)和圖5(b)所示。
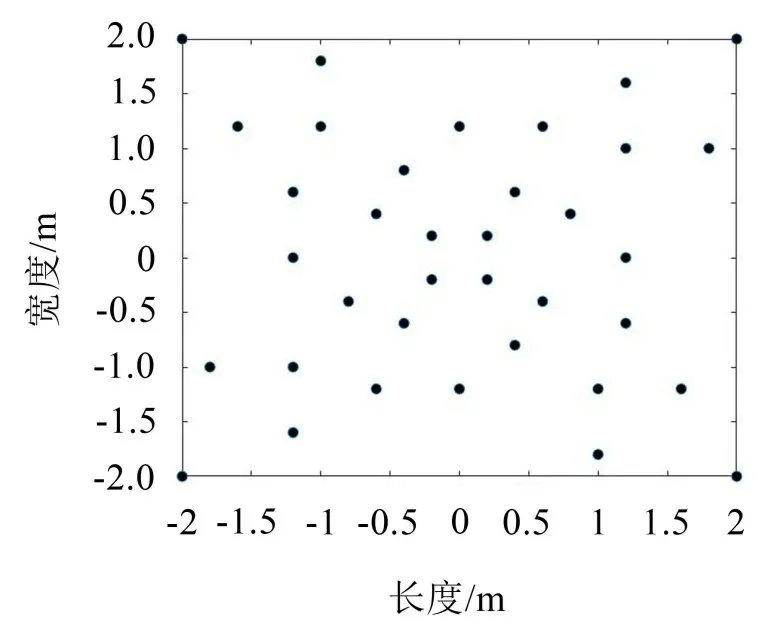
圖4 優(yōu)化傳聲器陣列位置圖
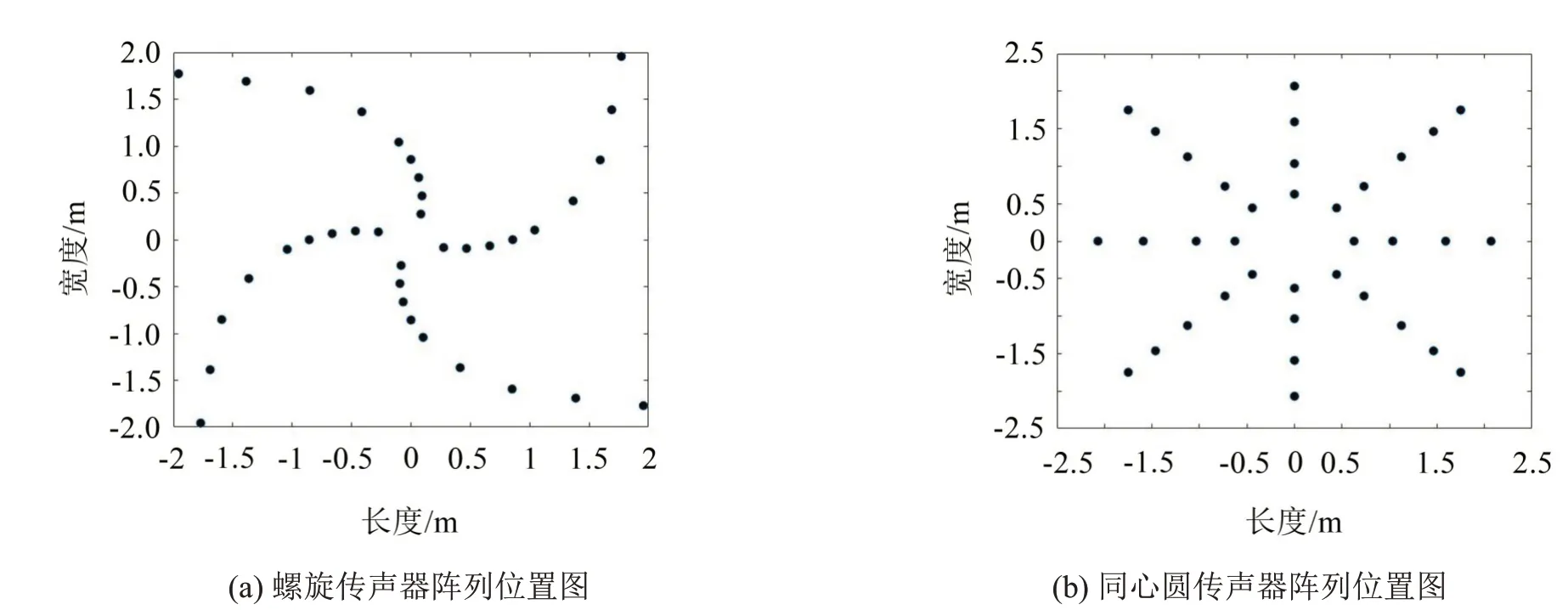
圖5 常規(guī)規(guī)則陣列位置圖
2.2 性能分析
對(duì)比優(yōu)化陣列與多臂螺旋陣列和同心圓陣列對(duì)應(yīng)的陣列響應(yīng)(PSF)的主瓣寬度和動(dòng)態(tài)范圍。對(duì)比結(jié)果如圖6(a)和圖6(b)所示。
從圖6(a)可以看出,優(yōu)化陣列的動(dòng)態(tài)范圍在300 Hz到1 000 Hz低頻范圍內(nèi)表現(xiàn)優(yōu)異,高于同心圓陣列2 dB~6 dB,高于螺旋陣列4 dB~8 dB,而在1 000 到1 500 Hz 內(nèi),3 個(gè)陣列動(dòng)態(tài)范圍近似,1 500到3 000 Hz 范圍內(nèi),優(yōu)化陣列的動(dòng)態(tài)范圍優(yōu)于另外兩種規(guī)則陣列,其高于螺旋陣列0~3 dB,高于同心圓陣列0~5 dB。仿真結(jié)果表明,優(yōu)化陣列旁瓣水平性能更優(yōu)。
圖6(b)顯示了3 種陣列在300 Hz 到3 000 Hz 頻率范圍內(nèi)的主瓣寬度對(duì)比,從圖6(b)可以看出,優(yōu)化陣列的主瓣寬度在整個(gè)頻帶內(nèi)小于其它兩個(gè)陣列,其比螺旋陣列減小0.1 m~0.3 m,比同心圓陣列減小0.1 m。仿真結(jié)果表明,優(yōu)化陣列主瓣寬度更窄,對(duì)應(yīng)的成像分辨率更高。
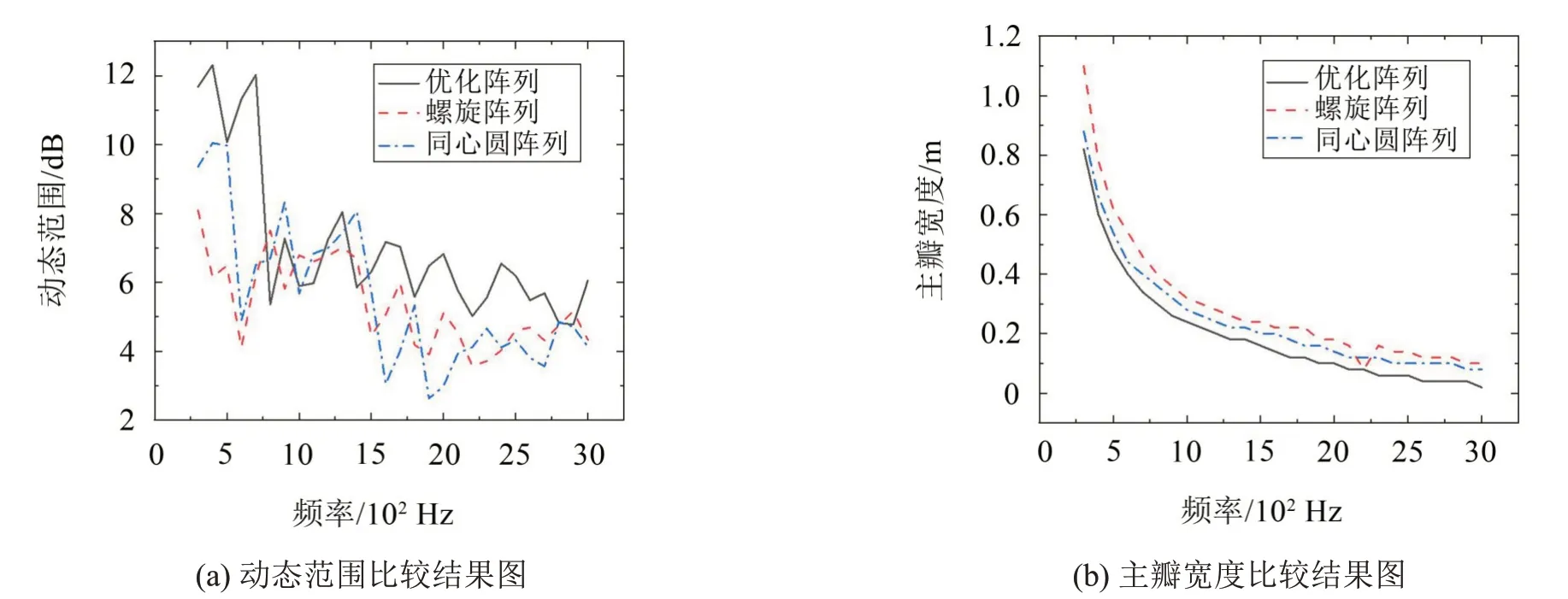
圖6 陣列性能對(duì)比圖
為了進(jìn)一步驗(yàn)證優(yōu)化陣列的噪聲源定位效果,采用常規(guī)波束形成算法進(jìn)行仿真驗(yàn)證,設(shè)置2個(gè)800 Hz的點(diǎn)聲源,位置分別為(-0.3,6,-0.3)m和(0.3,6,0.3)m,在聲源信號(hào)中加入信噪比(Signal noise ratio,SNR)為10 dB的高斯白噪聲。聲源面所在的成像面距離陣列中心6 m,成像面被等間隔劃分為5 m×5 m矩形網(wǎng)格,間隔為0.03 m。如圖7(a)至圖7(c)所示,比較優(yōu)化陣列與多臂螺旋陣列和同心圓陣列的聲源成像云圖、3個(gè)陣列的聲成像結(jié)果。
從圖7 中可以看出,在SNR=10 dB 時(shí)利用優(yōu)化陣列可以準(zhǔn)確定位出兩個(gè)點(diǎn)聲源,主瓣較窄且沒有旁瓣干擾。利用多臂螺旋陣列和同心圓陣列進(jìn)行聲源識(shí)別也可以準(zhǔn)確地識(shí)別聲源,但存在較多旁瓣,影響了聲源定位的效果。結(jié)果表明,優(yōu)化陣列利用常規(guī)波束形成進(jìn)行噪聲源定位時(shí)有著更好的成像效果,主瓣窄且旁瓣水平低于多臂螺旋陣列和同心圓陣列,陣列性能更好。
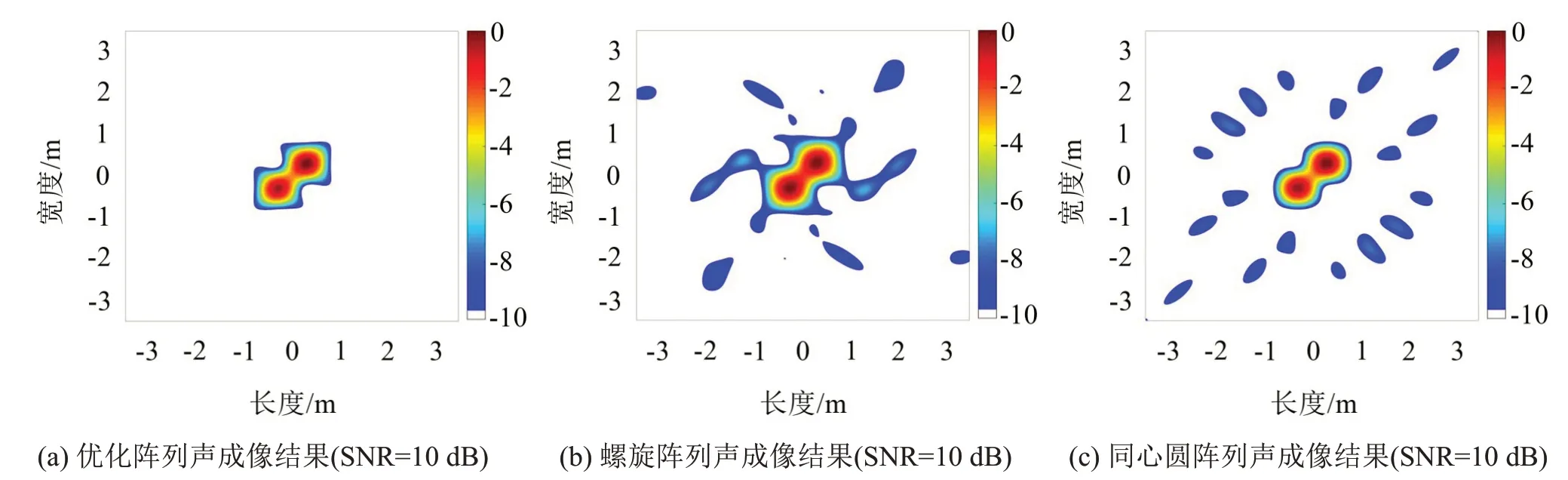
圖7 陣列聲成像對(duì)比圖(SNR=10 dB)
如圖8(a)和圖8(f)所示為低信噪比環(huán)境下3個(gè)陣列的性能對(duì)比結(jié)果,信噪比分別設(shè)置為5 dB和0。
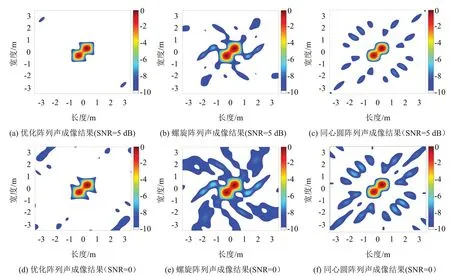
圖8 陣列聲成像對(duì)比圖(SNR=5 dB和SNR=0)
從圖8 可以看出,SNR=5 dB 時(shí),利用優(yōu)化陣列也可以準(zhǔn)確定位兩個(gè)聲源,且旁瓣較少,螺旋陣列和同心圓陣列雖然也能定位出兩個(gè)聲源,但存在許多旁瓣,影響了聲源定位的精度。SNR=0時(shí),優(yōu)化陣列的成像結(jié)果同樣優(yōu)于螺旋陣列和同心圓的成像結(jié)果。此外,信噪比越低,成像結(jié)果越差,而優(yōu)化陣列在SNR=0時(shí)仍有較好的成像結(jié)果,驗(yàn)證了所提算法的正確性和優(yōu)化陣列的性能穩(wěn)定性。
3 結(jié)語
由于使用大陣列的成本高,減少傳聲器數(shù)量會(huì)導(dǎo)致陣列存在主瓣寬度增大、旁瓣水平增加等問題。本文提出了一種用于列車通過噪聲分析的傳聲器陣列優(yōu)化設(shè)計(jì)方法,得出以下結(jié)論:
(1)采用遺傳算法優(yōu)化陣列模型時(shí)采用整數(shù)編碼的方式,省略解碼過程,并采取種群內(nèi)隨機(jī)配對(duì)、自由交叉和使隨機(jī)數(shù)量的染色體強(qiáng)制變異的優(yōu)化策略得到性能優(yōu)異的陣列布置,并且結(jié)合旋轉(zhuǎn)分塊計(jì)算有效提升了算法的計(jì)算效率。
(2)仿真結(jié)果表明,優(yōu)化陣列在低信噪比環(huán)境中也可以擁有良好的成像結(jié)果。與兩種常規(guī)陣列相比,在300 Hz~3 000 Hz內(nèi),優(yōu)化陣列用常規(guī)波束形成進(jìn)行聲源識(shí)別時(shí)擁有更加優(yōu)異的性能,旁瓣水平更低,主瓣寬度更窄。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
