基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng)
2022-12-23 12:03:36石廣洋張來(lái)紅歐陽(yáng)東哲黃國(guó)鵬
電子設(shè)計(jì)工程 2022年24期
關(guān)鍵詞:系統(tǒng)
石廣洋,張來(lái)紅,歐陽(yáng)東哲,劉 超,黃國(guó)鵬
(1.神華北電勝利能源有限公司,內(nèi)蒙古錫林浩特 026000;2.北京中礦華沃科技股份有限公司,北京 100000)
露天煤礦環(huán)境下,已在運(yùn)輸車(chē)輛、工程機(jī)械上安裝了防撞預(yù)警、抗疲勞預(yù)警、盲區(qū)監(jiān)測(cè)、安全帶監(jiān)測(cè)以及毫米波雷達(dá)自動(dòng)剎車(chē)等系統(tǒng)。目前,我國(guó)企業(yè)信息化程度較低,部分系統(tǒng)技術(shù)已經(jīng)被市場(chǎng)所淘汰。在車(chē)輛安全輔助系統(tǒng)中存在著大量的主機(jī)和顯示屏,會(huì)對(duì)駕駛員的駕駛體驗(yàn)產(chǎn)生直接的影響。因此,解決煤礦信息化建設(shè)中存在的問(wèn)題,是煤礦信息化建設(shè)的當(dāng)務(wù)之急。為此,露天礦山規(guī)劃了車(chē)輛安全輔助系統(tǒng)的整合與更新。目前,文獻(xiàn)[1]提出的多目標(biāo)捕獲算法的防撞自動(dòng)剎車(chē)系統(tǒng),在規(guī)定剎車(chē)制動(dòng)空間內(nèi),設(shè)置輔助權(quán)限參數(shù),簡(jiǎn)化制動(dòng)助力器,獲取不同工況下的助力值。同時(shí),結(jié)合多目標(biāo)捕獲算法捕獲障礙物,完成自動(dòng)剎車(chē)系統(tǒng)設(shè)計(jì);文獻(xiàn)[2]提出的基于駕駛意圖共享的防撞自動(dòng)剎車(chē)系統(tǒng),首先將車(chē)輛行駛過(guò)程描述為一個(gè)時(shí)間序列過(guò)程,借助隱馬爾科夫模型構(gòu)建駕駛?cè)笋{駛意圖與車(chē)輛相對(duì)行駛狀態(tài)序列之間的隱含關(guān)系模型,并結(jié)合避障預(yù)警算法,完成防撞自動(dòng)剎車(chē)系統(tǒng)設(shè)計(jì)。然而,上述兩種方法對(duì)復(fù)雜目標(biāo)識(shí)別結(jié)果不精準(zhǔn),導(dǎo)致剎車(chē)效果不佳,為此,提出了基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng)。
1 系統(tǒng)硬件結(jié)構(gòu)設(shè)計(jì)
研究并升級(jí)了原有的露天礦區(qū)卡車(chē)上的自動(dòng)剎車(chē)系統(tǒng)主機(jī),并在主機(jī)上添加毫米波雷達(dá)傳感器,通過(guò)主機(jī)對(duì)各種安全信息進(jìn)行全面地研究和判斷,從而形成一個(gè)完整的車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng)。
露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng)硬件結(jié)構(gòu)如圖1 所示。
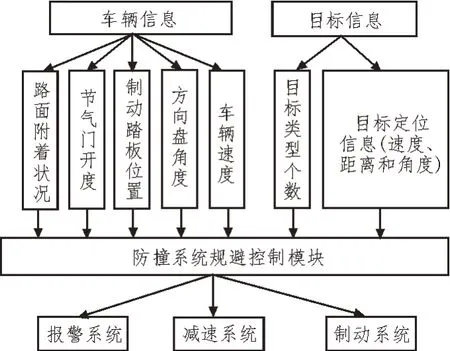
圖1 系統(tǒng)硬件結(jié)構(gòu)
由圖1 可知,利用毫米波雷達(dá)傳感器實(shí)現(xiàn)了對(duì)前方目標(biāo)的準(zhǔn)確定位與識(shí)別。通過(guò)CAN 總線將自動(dòng)機(jī)和目標(biāo)行為的信息傳遞給車(chē)輛防撞系統(tǒng)規(guī)避控制模塊。在采集到的數(shù)據(jù)基礎(chǔ)上,將信號(hào)輸入至防撞系統(tǒng)規(guī)避控制模塊,對(duì)被測(cè)對(duì)象的危險(xiǎn)程度進(jìn)行分級(jí)[3-5]。通過(guò)對(duì)不同危險(xiǎn)程度的分析,可以對(duì)操作者進(jìn)行三種不同程度的危險(xiǎn)指示,對(duì)操作者進(jìn)行警告和幫助,使其能夠正確地進(jìn)行駕駛,以保證行車(chē)安全[6]。
1.1 毫米波雷達(dá)傳感器
毫米波雷達(dá)傳感器是一種傳感元件,該元件的毫米波波長(zhǎng)介于光波與厘米波之間,具有易集成和空間分辨率較高的特點(diǎn)[7]。毫米波雷達(dá)的抗干擾性優(yōu)于相機(jī)、紅外和激光等,圖2 中顯示了毫米波雷達(dá)傳感器的構(gòu)造。
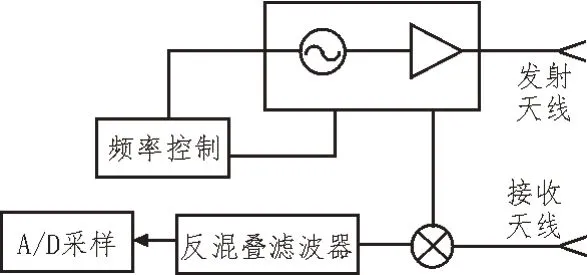
圖2 毫米波雷達(dá)傳感器結(jié)構(gòu)
由圖2 可知,雷達(dá)傳感器包括射頻、接收機(jī)和各個(gè)傳感器,在天線的設(shè)計(jì)上,盡量保證波束寬度,實(shí)現(xiàn)不同設(shè)備的實(shí)時(shí)同步。由于低頻率成分所引起的噪音會(huì)使弱回波信號(hào)被掩蓋,從而成為影響雷達(dá)探測(cè)范圍的重要因素[8-10],所以要盡量減少噪音參數(shù)。
1.2 集成顯示器
卡車(chē)駕駛室的防撞屏、盲區(qū)監(jiān)測(cè)顯示系統(tǒng)包括多個(gè)顯示器,大量的顯示器占據(jù)較大的空間,大多數(shù)都是8 寸的普通顯示器,顯得雜亂無(wú)序[11]。此外,顯示屏的背光在夜晚也會(huì)對(duì)司機(jī)的視覺(jué)產(chǎn)生一定的影響。為此開(kāi)發(fā)了汽車(chē)工業(yè)級(jí)多用途電容式觸摸屏,并將其屏幕提升到10.1寸,其可以顯示所有的安全影像,如防撞警告、毫米波雷達(dá)制動(dòng)、360 度全景影像、右前、右前盲區(qū)監(jiān)控和識(shí)別、駕駛員行為分析、駕駛室視頻監(jiān)控等[12]。每一個(gè)功能模塊都會(huì)根據(jù)警報(bào)的情況自動(dòng)進(jìn)行屏幕的切換和彈出,本機(jī)采用感光元件,可根據(jù)周?chē)h(huán)境的不同而自動(dòng)調(diào)整其背光源以及外置揚(yáng)聲器,工作溫度通常設(shè)置為-40~75 ℃;采用工業(yè)設(shè)計(jì)航空插頭,其具有防塵、防水的功能;顯示屏上有多功能按鍵以及開(kāi)關(guān)按鈕。機(jī)箱由鋁合金與鋼板組成,安裝方式為臺(tái)式及吊起方式[13]。
1.3 360度全景影像監(jiān)控
該系統(tǒng)采用4-6 個(gè)超高分辨率的夜視攝像機(jī),對(duì)電鏟和其他主要采掘設(shè)備進(jìn)行實(shí)時(shí)拍攝。圖像處理機(jī)經(jīng)過(guò)變形校正、透視變換、圖像拼接等技術(shù),最后形成360 度立體影像,并在顯示屏上顯示,實(shí)現(xiàn)360 度全方位的駕駛輔助功能[14]。對(duì)電鏟進(jìn)行戶外監(jiān)控,并在電鏟左邊較大的死角處增加了一個(gè)雙方向的防爆照相機(jī)和一個(gè)照明充電器。
1.4 RTK北斗定位模塊
原卡車(chē)和工程機(jī)械防撞預(yù)警系統(tǒng)的定位模組精度一般,準(zhǔn)確率在±2.5 m 左右。該研究對(duì)原卡車(chē)、工程機(jī)械防撞預(yù)警系統(tǒng)的定位和天線進(jìn)行了改造,采用了高精度RTK 北斗定位模塊,并在電鏟上加裝了高精度定位模塊,實(shí)現(xiàn)了三維精準(zhǔn)定位。通過(guò)精準(zhǔn)定位,能夠精確地分辨出卡車(chē)所處臺(tái)階,防止車(chē)輛在不同的臺(tái)階間出現(xiàn)車(chē)輛誤報(bào)警,從而達(dá)到精確報(bào)警[15]。
高精度的定位模塊是實(shí)現(xiàn)露天礦區(qū)車(chē)輛導(dǎo)航系統(tǒng)的關(guān)鍵技術(shù),若在后期實(shí)現(xiàn)貨車(chē)裝載定位,則不需要額外的硬件費(fèi)用。只有在主要礦用設(shè)備的車(chē)載終端上配置對(duì)應(yīng)的定位系統(tǒng)軟件,才能達(dá)到裝載對(duì)齊的作用。
2 系統(tǒng)軟件部分設(shè)計(jì)
2.1 防撞預(yù)警自動(dòng)剎車(chē)聯(lián)動(dòng)決策算法
通過(guò)對(duì)已有的碰撞預(yù)警與毫米波雷達(dá)自動(dòng)剎車(chē)系統(tǒng)進(jìn)行分析,在保證其基本性能的基礎(chǔ)上,通過(guò)對(duì)多個(gè)傳感器的多個(gè)信息進(jìn)行分析與評(píng)估,可將其與自動(dòng)剎車(chē)系統(tǒng)相結(jié)合,使其具有較好的性能,有效地提高了報(bào)警的準(zhǔn)確性,防止了誤報(bào)[16]。
引入無(wú)量綱量ω和中間比較因子λ,ω的計(jì)算公式為:

式中,d表示行車(chē)間距,d1表示預(yù)警臨界距離,d2表示制動(dòng)臨界距離,由此得出防撞自動(dòng)剎車(chē)系統(tǒng)連續(xù)三級(jí)預(yù)警與自動(dòng)剎車(chē)形式,如下所示:
當(dāng)ω>1時(shí),相當(dāng)于行車(chē)間距大于制動(dòng)臨界距離,此時(shí)車(chē)輛進(jìn)入了預(yù)警區(qū)(100 m 左右),該范圍內(nèi)實(shí)時(shí)顯示臨近車(chē)輛位置和距離;
當(dāng)0 <ω<λ時(shí),相當(dāng)于行車(chē)間距與預(yù)警臨界距離值非常接近,此時(shí)車(chē)輛進(jìn)入了報(bào)警區(qū)(60 m 左右),顯示且語(yǔ)音提醒臨近車(chē)輛位置和距離;
當(dāng)ω<0時(shí),相當(dāng)于行車(chē)間距小于預(yù)警臨界距離,此時(shí)車(chē)輛進(jìn)入了危險(xiǎn)區(qū)(30 m 左右),顯示且語(yǔ)音提醒“危險(xiǎn)”。
2.2 圖像動(dòng)態(tài)識(shí)別算法
在礦用重型卡車(chē)和特種車(chē)輛車(chē)身上安裝4-6 個(gè)高清防爆攝像頭,能夠?qū)?chē)輛周邊進(jìn)行實(shí)時(shí)監(jiān)控,實(shí)現(xiàn)360 度全景輔助駕駛。同時(shí),它還可以與毫米波雷達(dá)的自動(dòng)剎車(chē)、碰撞警報(bào)等技術(shù)相結(jié)合,在碰撞即將來(lái)臨時(shí),監(jiān)視器會(huì)自動(dòng)顯示并發(fā)出警報(bào)。
假設(shè)存在兩個(gè)n維向量W1×n和E1×n,將這兩個(gè)向量表示成如下形式:

充分考慮兩個(gè)向量端點(diǎn)之間的距離,計(jì)算結(jié)果越小,說(shuō)明兩個(gè)動(dòng)態(tài)圖像越相似,反之,則不相似。當(dāng)采集到對(duì)應(yīng)的圖像后,可以實(shí)時(shí)地顯示道路狀況,并與毫米波雷達(dá)碰撞預(yù)警形成聯(lián)動(dòng)。在即將發(fā)生碰撞時(shí),顯示屏?xí)詣?dòng)顯示并發(fā)出警告。
2.3 毫米波雷達(dá)防碰撞自動(dòng)剎車(chē)功能
露天礦區(qū)車(chē)輛防撞信號(hào)的瞬時(shí)頻率隨著時(shí)間線性變換而發(fā)生改變,當(dāng)前方有單目標(biāo)回波時(shí),將發(fā)射信號(hào)和反射信號(hào)混合后,得到的信號(hào)中含有目標(biāo)相對(duì)距離和速度信息。在發(fā)射信號(hào)上升和下降階段,中頻輸出信號(hào)可表示為:
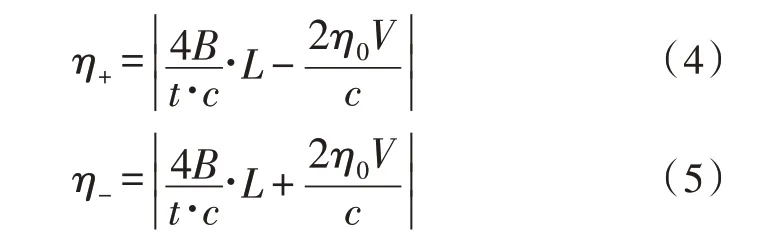
式中,η0表示發(fā)射信號(hào)中心頻率,V表示相對(duì)速度,c表示光速,B表示頻帶寬度,t表示從發(fā)射激光到接收激光的時(shí)間間隔,L表示兩車(chē)的距離。
忽視汽車(chē)與目標(biāo)間的相對(duì)速度,可以計(jì)算出兩車(chē)的距離,測(cè)距計(jì)算公式為:

根據(jù)上述公式,能夠確定目標(biāo)位置。當(dāng)車(chē)輛減速后的距離超過(guò)安全距離時(shí),系統(tǒng)會(huì)發(fā)出減速指令,當(dāng)兩車(chē)?yán)^續(xù)靠近時(shí),剎車(chē)裝置的剎車(chē)命令(剎車(chē)動(dòng)作)將被觸發(fā),直至車(chē)輛停止。
3 實(shí)驗(yàn)分析
3.1 實(shí)驗(yàn)環(huán)境模擬
實(shí)驗(yàn)環(huán)境模擬圖,如圖3 所示。
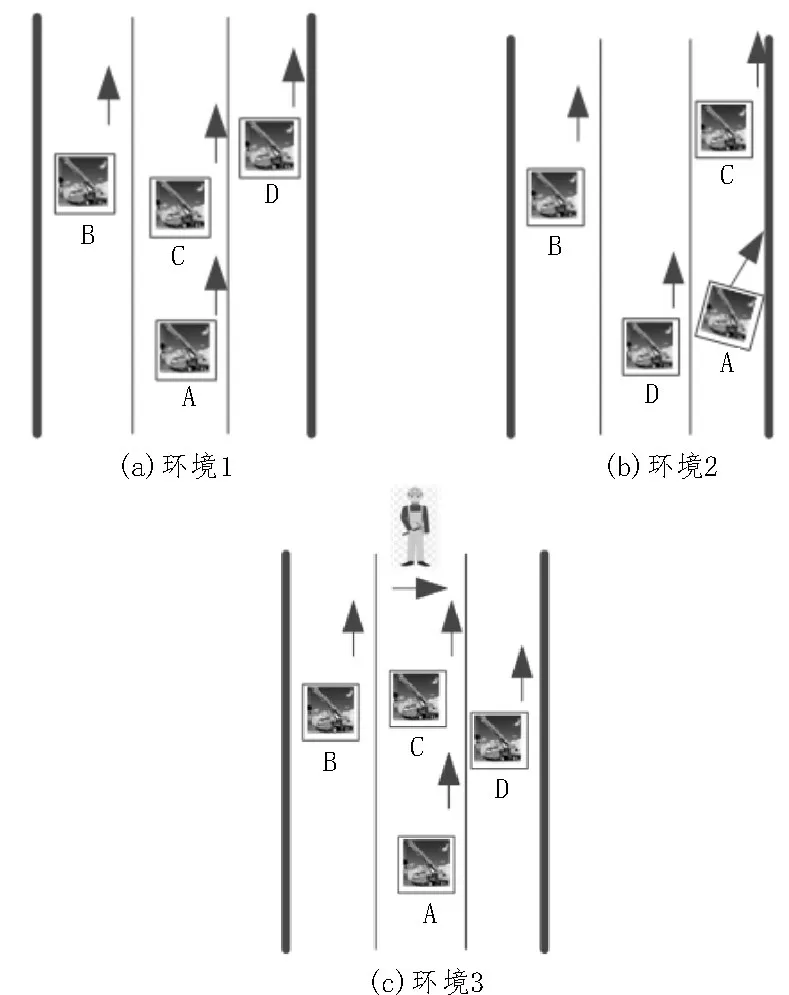
圖3 實(shí)驗(yàn)環(huán)境模擬圖
由圖3(a)可知,對(duì)于同向行駛的車(chē)輛,車(chē)輛A 在中間車(chē)道,車(chē)輛C 為危險(xiǎn)目標(biāo)。由圖3(b)可知,車(chē)輛A 行駛方向沒(méi)有沿著公路前方行駛,而是出現(xiàn)偏離車(chē)道的行為,前方為護(hù)欄。由圖3(c)可知,車(chē)輛A 在中間車(chē)道,在同一車(chē)道的C 和行人是主要危險(xiǎn)目標(biāo)。
3.2 實(shí)驗(yàn)結(jié)果與分析
在上述實(shí)驗(yàn)環(huán)境下,分別使用多目標(biāo)捕獲算法的防撞自動(dòng)剎車(chē)系統(tǒng)、基于駕駛意圖共享的防撞自動(dòng)剎車(chē)系統(tǒng)和基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng),對(duì)比分析剎車(chē)距離,對(duì)比結(jié)果如圖4所示。
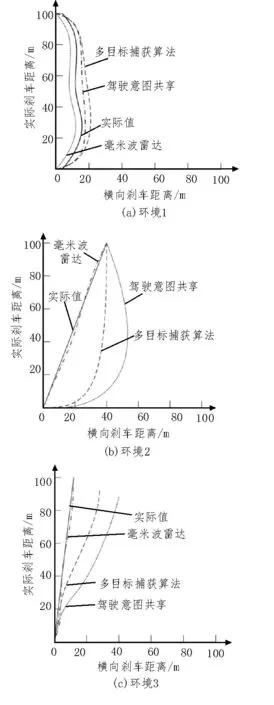
圖4 三種系統(tǒng)剎車(chē)距離對(duì)比分析
由圖4(a)可知,使用多目標(biāo)捕獲算法的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)距離不一致,在橫向也存在最多22 m 的剎車(chē)距離;使用基于駕駛意圖共享的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)距離不一致,其在橫向也存在最多16 m 的剎車(chē)距離;使用基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)距離完全一致,且剎車(chē)線路完全符合,無(wú)橫向剎車(chē)軌跡。由圖4(b)可知,使用多目標(biāo)捕獲算法的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線不符合,其中橫向最大剎車(chē)距離比實(shí)際剎車(chē)距離長(zhǎng)25 m;使用基于駕駛意圖共享的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線不符合,其中橫向最大剎車(chē)距離比實(shí)際剎車(chē)距離長(zhǎng)40 m;使用基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線基本符合,但也存在2 m 的最大橫向誤差。由圖4(c)可知,使用多目標(biāo)捕獲算法的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線不符合;使用基于駕駛意圖共享的防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線不符合;使用基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng),與實(shí)際剎車(chē)曲線基本符合,但也存在1.8 m 的最大橫向誤差。
4 結(jié)束語(yǔ)
針對(duì)露天礦重型卡車(chē)容易受到駕駛員疲勞、超速、惡劣天氣等因素影響,容易發(fā)生車(chē)輛追尾或碰撞事故的問(wèn)題,提出了基于毫米波雷達(dá)的露天礦區(qū)車(chē)輛防撞自動(dòng)剎車(chē)系統(tǒng)。結(jié)合圖像動(dòng)態(tài)識(shí)別算法,建立了露天礦卡車(chē)防碰撞的自動(dòng)剎車(chē)聯(lián)動(dòng)機(jī)制,實(shí)現(xiàn)了礦用卡車(chē)的自動(dòng)減速和剎車(chē),解決了影響礦山車(chē)輛交通運(yùn)輸安全的問(wèn)題。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
