水下清洗機(jī)器人控制系統(tǒng)軟件設(shè)計(jì)
2022-12-23 12:03:38劉捷黃燕民陳宏軒羅友高唐國(guó)元
電子設(shè)計(jì)工程 2022年24期
劉捷,黃燕民,陳宏軒,羅友高,孫 濤,唐國(guó)元
(1.武漢第二船舶設(shè)計(jì)研究所,湖北武漢 430060;2.華中科技大學(xué)船舶與海洋工程學(xué)院,湖北武漢 430074)
隨著海洋裝備技術(shù)的發(fā)展與應(yīng)用,許多具有特殊功能和用途的水下機(jī)器人被研制出來(lái),并廣泛應(yīng)用在水下資源勘探、深水作業(yè)、救援打撈、漁業(yè)養(yǎng)殖等領(lǐng)域[1-2]。水下清洗機(jī)器人作為一種特殊的服務(wù)型機(jī)器人,主要用于對(duì)目標(biāo)作業(yè)物表面附著的臟物進(jìn)行清洗,常見的清洗方式有射流式、刷洗式以及混合式[3]。
設(shè)計(jì)一款交互性好、實(shí)時(shí)性高、功能完備的軟件控制系統(tǒng)對(duì)提高清洗機(jī)器人水下作業(yè)效率十分重要。該文結(jié)合實(shí)際使用場(chǎng)景,基于開發(fā)高效的Python語(yǔ)言和梯形圖語(yǔ)言,采取模塊化設(shè)計(jì)方式,完成了水下清洗機(jī)器人控制系統(tǒng)軟件的整體設(shè)計(jì)開發(fā)。
1 軟件系統(tǒng)結(jié)構(gòu)
清洗機(jī)器人軟件系統(tǒng)整體由上位機(jī)控制終端和下位機(jī)執(zhí)行終端兩部分組成,根據(jù)任務(wù)屬性不同,具體可分為應(yīng)用層、決策層和驅(qū)動(dòng)層[4]。應(yīng)用層主要負(fù)責(zé)人機(jī)交互功能,利用上位機(jī)軟件界面實(shí)時(shí)監(jiān)控從下位機(jī)采集并上傳的清洗機(jī)器人運(yùn)行狀態(tài)信息,如慣性導(dǎo)航模塊測(cè)量的姿態(tài)數(shù)據(jù)、深度計(jì)測(cè)量的當(dāng)前工作水深信息以及網(wǎng)絡(luò)攝像頭視頻畫面等,同時(shí)還負(fù)責(zé)將操作人員在軟件界面輸入的操作指令發(fā)送給決策層執(zhí)行;決策層負(fù)責(zé)解算下位機(jī)發(fā)送的數(shù)據(jù)信息和操作人員輸入的指令信息,將通過(guò)一系列運(yùn)算得到的控制指令發(fā)送給下位機(jī)執(zhí)行;驅(qū)動(dòng)層則負(fù)責(zé)執(zhí)行由上位機(jī)發(fā)出的控制指令,同時(shí)采集和上傳清洗機(jī)器人的水下運(yùn)行數(shù)據(jù)。清洗機(jī)器人軟件系統(tǒng)結(jié)構(gòu)如圖1 所示。

圖1 清洗機(jī)器人軟件系統(tǒng)結(jié)構(gòu)
清洗機(jī)器人控制系統(tǒng)軟件采用模塊化設(shè)計(jì),將執(zhí)行不同功能的程序塊分隔開來(lái),以此降低彼此間的耦合,提高軟件開發(fā)效率。軟件主要分為通信模塊、運(yùn)動(dòng)控制模塊、視頻畫面顯示模塊、運(yùn)行位姿顯示模塊、手柄、推進(jìn)器和傳感器數(shù)據(jù)顯示模塊。通信模塊用于上、下位機(jī)之間的數(shù)據(jù)交換,這也是軟件系統(tǒng)能夠控制清洗機(jī)器人水下位姿的前提條件;運(yùn)動(dòng)控制模塊會(huì)根據(jù)程序設(shè)定好的控制算法,按照自主模式或是手動(dòng)模式將控制指令發(fā)送給下位機(jī)執(zhí)行;視頻畫面顯示模塊則是將清洗機(jī)器人本體搭載的兩個(gè)網(wǎng)絡(luò)攝像頭視頻信號(hào)處理轉(zhuǎn)換為圖像信息,顯示在軟件界面,為操作人員提供決策參考;運(yùn)行位姿顯示模塊將根據(jù)下位機(jī)回傳的傳感器數(shù)據(jù),在軟件界面繪制實(shí)時(shí)位姿圖,直觀反映清洗機(jī)器人水下運(yùn)行狀態(tài);手柄、推進(jìn)器和傳感器數(shù)據(jù)顯示模塊則在軟件界面顯示了具體的數(shù)值信息。
2 上位機(jī)程序設(shè)計(jì)
上位機(jī)作為控制系統(tǒng)的核心,是實(shí)現(xiàn)水下清洗機(jī)器人能夠按照預(yù)期軌跡、姿態(tài)運(yùn)行的關(guān)鍵。該文水下清洗機(jī)器人控制系統(tǒng)上位機(jī)軟件使用Python 語(yǔ)言進(jìn)行編寫,該語(yǔ)言開發(fā)簡(jiǎn)潔、可擴(kuò)展性強(qiáng)[5],用來(lái)編寫清洗機(jī)器人上位機(jī)軟件十分合適。軟件開發(fā)工具選擇PyCharm,用戶界面則采用跨平臺(tái)界面庫(kù)PyQt5作為開發(fā)框架。
2.1 設(shè)計(jì)方案
清洗機(jī)器人上位機(jī)軟件具體需要實(shí)現(xiàn)的幾個(gè)功能分別是系統(tǒng)通信、運(yùn)動(dòng)控制、網(wǎng)絡(luò)視頻信號(hào)讀取和顯示、實(shí)時(shí)位姿展示等,因而需要對(duì)這幾個(gè)功能分別進(jìn)行程序設(shè)計(jì)。上位機(jī)軟件結(jié)構(gòu)如圖2 所示。
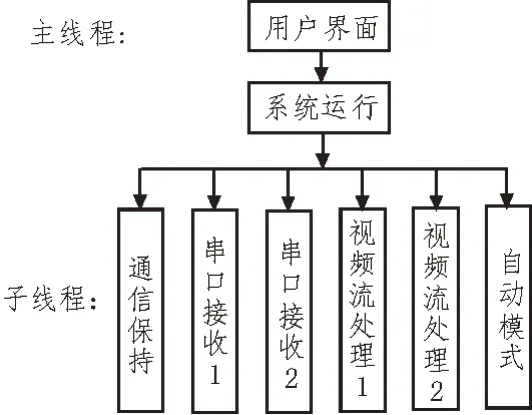
圖2 上位機(jī)軟件結(jié)構(gòu)
2.2 關(guān)鍵功能實(shí)現(xiàn)
1)系統(tǒng)通信:清洗機(jī)器人控制系統(tǒng)具備手動(dòng)控制和自動(dòng)控制兩種工作模式,而無(wú)論處在何種工作模式下,其水面系統(tǒng)和水下系統(tǒng)之間的數(shù)據(jù)交互都是以臍帶纜作為傳輸介質(zhì)并通過(guò)以太網(wǎng)通信連接實(shí)現(xiàn)的。清洗機(jī)器人手動(dòng)控制模式是通過(guò)使用兩臺(tái)操縱手柄來(lái)實(shí)現(xiàn)的,操縱手柄經(jīng)USB 串行線建立與工控機(jī)的物理連接。在Python 開發(fā)環(huán)境中,使用第三方庫(kù)函數(shù)來(lái)實(shí)現(xiàn)這兩種通信。在PyCharm 開發(fā)工具中安裝“pySerial”和“HslCommunication”兩個(gè)模塊,使用“from ** import **”語(yǔ)句獲取模塊中的調(diào)用方法。在建立的串口通信線程中,對(duì)串口參數(shù)進(jìn)行初始化,按照手柄通信協(xié)議配置相應(yīng)的串口號(hào)、波特率、奇偶校驗(yàn)等串口屬性,最后使用“serial.Serial()”方法對(duì)所配置的串口對(duì)象進(jìn)行實(shí)例化,在確認(rèn)串口正確打開后,對(duì)實(shí)例化的串口對(duì)象使用“read()”方法便可以接收來(lái)自操縱手柄的數(shù)據(jù),數(shù)據(jù)接收格式則可以根據(jù)需要自由設(shè)定。
清洗機(jī)器人使用西門子S7-1500PLC 作為水下控制器,該型控制器支持多種數(shù)據(jù)通信協(xié)議,其中較有特色的是西門子特有不開放的S7 通信協(xié)議,這種通信協(xié)議不要求服務(wù)器方編寫通信程序,使用便捷[6]。該文清洗機(jī)器人水面、水下控制系統(tǒng)通信使用支持S7 通信協(xié)議的開源模塊“HslCommunication”來(lái)實(shí)現(xiàn)。在程序中導(dǎo)入該模塊的兩個(gè)類“SiemensS7Net、SiemensPLCS”,并創(chuàng)建S7-1500PLC 連接對(duì)象類,使用“SiemensS7Net()”方法對(duì)S7-1500PLC 實(shí)例化,在線程中建立上位機(jī)與S7-1500PLC 的長(zhǎng)連接。“Connect Server().IsSuccess”方法用于判斷系統(tǒng)連接狀態(tài),當(dāng)在程序中調(diào)用“start()”方法開啟通信連接線程后,前者將返回一個(gè)表征通信連接狀態(tài)的布爾型變量,當(dāng)該連接狀態(tài)為“TRUE”,則表示水面、水下控制系統(tǒng)已成功建立長(zhǎng)連接,此時(shí)上位機(jī)便可以通過(guò)建立的以太網(wǎng)通信連接對(duì)下位機(jī)進(jìn)行連續(xù)讀寫數(shù)據(jù)操作。
2)運(yùn)動(dòng)控制:清洗機(jī)器人水下定深、定艏向控制是通過(guò)運(yùn)行程序中編寫的增量式PID 算法實(shí)現(xiàn)的。增量式PID 算法是一種遞推式算法,計(jì)算式如式(1)所示:
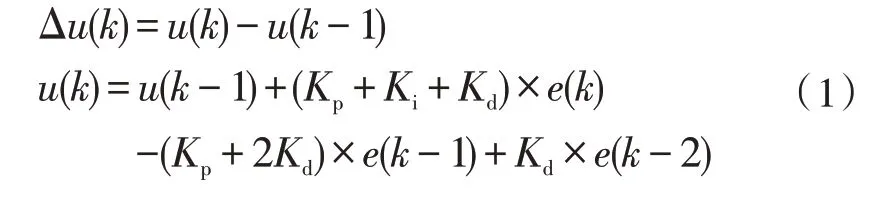
式中,u(k-1) 為控制系統(tǒng)上一次輸出,e(k)、e(k-1)、e(k-2)分別為最近三次偏差值,Kp為比例系數(shù),Ki為積分系數(shù),Kd為微分系數(shù)。該算法可有效減少偏差迭代次數(shù),提高運(yùn)算速度的同時(shí)減少了對(duì)計(jì)算機(jī)資源的占用[7-9]。
在上位機(jī)程序中,建立一個(gè)PID 算法的類,在類的初始化方法中分別對(duì)比例、積分、微分系數(shù)以及三次偏差值進(jìn)行初始化,通過(guò)將操縱手柄輸入的航向角和深度值與下位機(jī)上傳的角度、深度數(shù)據(jù)進(jìn)行比較得到偏差值,每收到一次數(shù)據(jù)調(diào)用一次PID算法進(jìn)行數(shù)據(jù)更新,程序自動(dòng)將計(jì)算得到的輸出變化量與上一次系統(tǒng)輸出值進(jìn)行疊加,得到最終輸出控制量。程序?qū)⒏鶕?jù)設(shè)定好的控制循環(huán)周期,對(duì)下位機(jī)進(jìn)行數(shù)據(jù)寫入操作。為驗(yàn)證程序中增量式PID算法的有效性,手動(dòng)設(shè)定艏向角為360°,程序控制周期T為100 ms,輸出響應(yīng)如圖3 所示。可見所寫代碼能夠起到實(shí)際控制作用,后續(xù)只需調(diào)整算法參數(shù)即可。
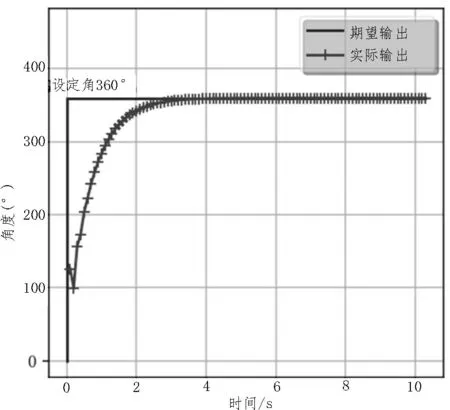
圖3 增量式PID算法程序輸出曲線
3)網(wǎng)絡(luò)視頻信號(hào)讀取和顯示:上位機(jī)使用跨平臺(tái)的計(jì)算機(jī)視覺庫(kù)OpenCV 來(lái)對(duì)網(wǎng)絡(luò)攝像頭視頻流信號(hào)進(jìn)行處理,提取出幀圖像并在軟件界面中使用“QLabel”控件來(lái)顯示。OpenCV-Python 庫(kù)豐富的函數(shù)和算法使得軟件開發(fā)效率顯著提高[10]。需要注意的是OpenCV 是按照BGR 格式讀取圖像信息的,而在軟件界面,圖像信息是以RGB 格式顯示的,因而需要在程序中調(diào)用“cvtColor()”和“QImage()”兩個(gè)函數(shù),將提取的幀圖片轉(zhuǎn)換為RGB 格式進(jìn)行顯示。通過(guò)在界面主線程引入定時(shí)器定時(shí)刷新界面或創(chuàng)建圖像處理線程的方式來(lái)解決界面顯示視頻畫面卡頓的問(wèn)題。
4)實(shí)時(shí)位姿展示:為了幫助操作人員更為直觀地了解清洗機(jī)器人在水下的運(yùn)動(dòng)姿態(tài)以及當(dāng)前工作水深情況,基于Matplotlib 庫(kù)在軟件界面建立兩個(gè)動(dòng)態(tài)圖表窗口,其中一個(gè)用來(lái)展示清洗機(jī)器人的三維姿態(tài),另一個(gè)用于生成清洗機(jī)器人下潛深度隨時(shí)間變化的二維曲線圖。Matplotlib 是一個(gè)堪比MATLAB圖像繪制功能的強(qiáng)大圖形庫(kù)[11-12],通過(guò)編寫代碼可以十分輕松地進(jìn)行2D、3D 圖形的繪制。為了能夠在PyQt 界面實(shí)現(xiàn)動(dòng)態(tài)繪圖,首先需要在程序中建立一個(gè)畫布的類,從Matplotlib 庫(kù)引入FigureCanvasQTAgg類,并在新建畫布類中繼承它。使用“figure()”生成圖像窗口,“add_subplot()”函數(shù)用于在該圖像窗口添加一個(gè)子圖,通過(guò)關(guān)鍵字“projection=‘3d’”將子圖設(shè)為3D 圖形屬性,之后便可以將該畫布類作為控件添加到軟件界面。繪制圖形及更改視圖需要用到“plot()”和“view_init()”兩個(gè)函數(shù)。
2.3 界面設(shè)計(jì)
在Python 中使用PyQt 庫(kù)開發(fā)GUI(圖形用戶界面)可選擇使用手寫代碼的方式設(shè)計(jì)軟件界面,也可使用QtDesigner 這一界面輔助工具對(duì)界面進(jìn)行設(shè)計(jì)。相比前者要手寫大量代碼,后者的引入則只需拖動(dòng)控件來(lái)設(shè)計(jì)界面,再用軟件生成代碼便可完成界面設(shè)計(jì),減少了程序設(shè)計(jì)的工作量[13],故而該文軟件界面設(shè)計(jì)采用這一方法。
3 下位機(jī)程序設(shè)計(jì)
采用了PLC 作為下位機(jī),其軟件不涉及復(fù)雜的邏輯運(yùn)算,只是接收并執(zhí)行來(lái)自上位機(jī)的指令以及上傳水下運(yùn)行數(shù)據(jù),該文主要針對(duì)一些開發(fā)過(guò)程中的實(shí)際問(wèn)題分析其解決辦法。
3.1 問(wèn)題描述
1)連接保護(hù):由于上位機(jī)軟件中使用西門子專門的S7 協(xié)議來(lái)與下位機(jī)通信,而這種通信機(jī)制是單向連接的[6],清洗機(jī)器人水下運(yùn)行過(guò)程中一旦失去與上位機(jī)的連接,可能會(huì)陷入失控運(yùn)行狀態(tài),故需要在程序中設(shè)置通信連接保護(hù)機(jī)制。
2)模擬量信號(hào)干擾和噪聲:清洗機(jī)器人以七臺(tái)推進(jìn)器作為水下動(dòng)力,為達(dá)到良好的控制效果,需要對(duì)推進(jìn)器進(jìn)行轉(zhuǎn)速的閉環(huán)控制。該文水下控制器S7-1500PLC 擴(kuò)展了一個(gè)模擬量采集模塊,最多支持八個(gè)模擬量信號(hào)同時(shí)采集。但模擬量信號(hào)采集易受信號(hào)源以及傳輸過(guò)程干擾等因素影響,準(zhǔn)確性有所下降,因而有必要對(duì)信號(hào)干擾進(jìn)行去除,獲得可信度較高的采集數(shù)據(jù)。
3)推進(jìn)器正反轉(zhuǎn)狀態(tài):該文清洗機(jī)器人所選配的推進(jìn)器,在未知轉(zhuǎn)速控制量的前提下,無(wú)法通過(guò)模擬量反饋信號(hào)直接判斷推進(jìn)器當(dāng)前轉(zhuǎn)向,只能根據(jù)反饋的模擬量信號(hào)計(jì)算得到轉(zhuǎn)速信息。在水下運(yùn)行過(guò)程中,清洗機(jī)器人兩種工作模式下的水平姿態(tài)都是自動(dòng)控制的,假設(shè)某一時(shí)刻推進(jìn)器轉(zhuǎn)速為反轉(zhuǎn)400 rpm,下一時(shí)刻控制量為正轉(zhuǎn)400 rpm,此時(shí)控制偏差應(yīng)為800 rpm,但實(shí)際計(jì)算偏差卻為零,導(dǎo)致推進(jìn)器保持原輸出不變,清洗機(jī)器人水下運(yùn)動(dòng)“失控”。因此需要在軟件層解決這一問(wèn)題。
3.2 解決方案
1)針對(duì)連接保護(hù)問(wèn)題,采取在下位機(jī)主程序塊OB1中,利用系統(tǒng)時(shí)鐘存儲(chǔ)器與加計(jì)數(shù)器(CTU)組成一個(gè)接通延時(shí)時(shí)長(zhǎng)為2 s 的定時(shí)器。系統(tǒng)通信已建立期間,上位機(jī)發(fā)出指令,保持加計(jì)數(shù)器始終處在復(fù)位狀態(tài),由于上位機(jī)指令輸出頻率遠(yuǎn)大于定時(shí)時(shí)長(zhǎng),因而在系統(tǒng)保持連接期間,下位機(jī)程序中這一組合定時(shí)器始終不能接通輸出。一旦系統(tǒng)通信斷開,2 s 時(shí)間一到,組合定時(shí)器接通輸出,推進(jìn)器輸出復(fù)位和急停程序立即響應(yīng),從而保證清洗機(jī)器人水下運(yùn)行安全。
2)針對(duì)模擬量信號(hào)去干擾和噪聲的問(wèn)題,常用方法為硬件濾波和軟件濾波。所使用的S7-1500PLC擴(kuò)展模擬量模塊自身具備一定的濾波能力,使用方便,只需在組態(tài)下載設(shè)備時(shí)開啟這一功能即可。而單純依靠PLC 有限的硬件濾波功能并不能解決推進(jìn)器轉(zhuǎn)速模擬量信號(hào)波動(dòng)的問(wèn)題,所以還需要考慮使用軟件濾波。但是由于控制器本身的局限性,PLC無(wú)法運(yùn)行復(fù)雜的濾波算法,文獻(xiàn)[14]則提出了一種用于PLC 軟件濾波的改進(jìn)型加權(quán)平均濾波算法,計(jì)算公式如式(2)所示。該算法使用結(jié)構(gòu)化控制語(yǔ)言(SCL)進(jìn)行編寫,相比使用廣泛的梯形圖語(yǔ)言(LAD),更適合處理復(fù)雜運(yùn)算,且編程條理清晰[15-16]。
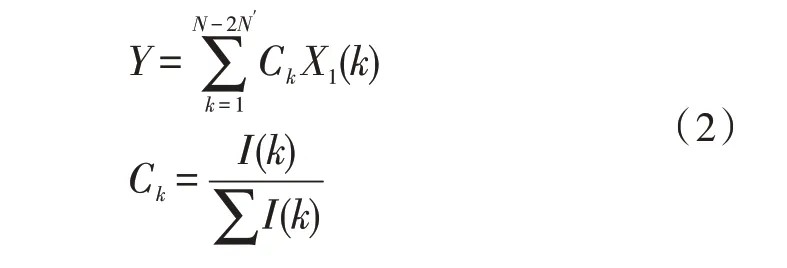
式中,X1(k)為采樣數(shù)據(jù)去除峰值后新的數(shù)組第k項(xiàng)數(shù)據(jù),Ck為權(quán)系數(shù),I(k)為X1(k)在新數(shù)組中出現(xiàn)的頻次,Y為濾波輸出。
3)針對(duì)推進(jìn)器正反轉(zhuǎn)狀態(tài)問(wèn)題,因推進(jìn)器正、反轉(zhuǎn)運(yùn)行是由上位機(jī)發(fā)出的控制指令決定的,雖然無(wú)法從反饋的轉(zhuǎn)速信息了解推進(jìn)器某一時(shí)刻的旋轉(zhuǎn)方向,但可以通過(guò)判斷上位機(jī)控制指令狀態(tài)來(lái)使推進(jìn)器變得“可控”。在PLC 程序中根據(jù)控制流程圖4 編寫軟件即可解決問(wèn)題。
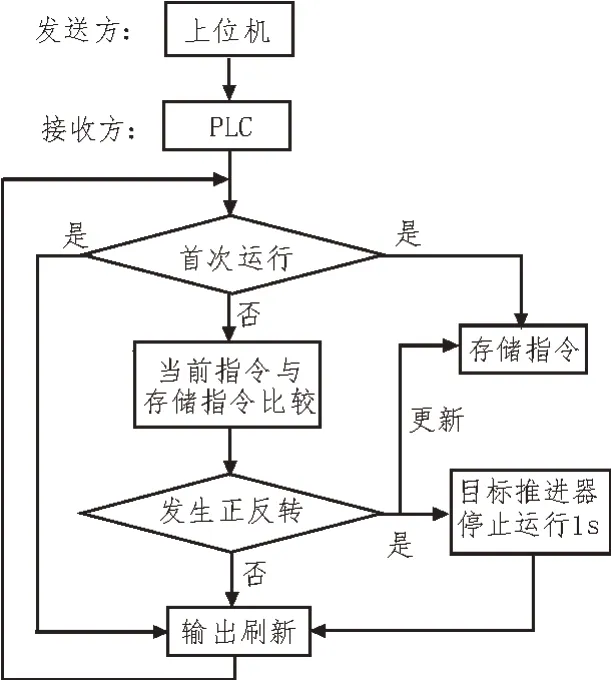
圖4 推進(jìn)器正反轉(zhuǎn)控制程序流程圖
4 軟件測(cè)試
為檢驗(yàn)該文所設(shè)計(jì)軟件的實(shí)際使用效果,從而發(fā)現(xiàn)和解決軟件設(shè)計(jì)中存在的問(wèn)題,選擇在人工搭建的水池進(jìn)行測(cè)試[17-18]。
截取了上位機(jī)軟件界面部分功能區(qū)域進(jìn)行展示。圖5 為軟件界面中清洗機(jī)器人水下運(yùn)動(dòng)姿態(tài)顯示區(qū),底部欄為實(shí)時(shí)姿態(tài)數(shù)據(jù)顯示區(qū)域。這種設(shè)計(jì)為實(shí)現(xiàn)良好的人機(jī)交互性提供了便利。軟件測(cè)試過(guò)程中各功能模塊使用正常,軟件工作狀態(tài)良好,達(dá)到了設(shè)計(jì)要求。
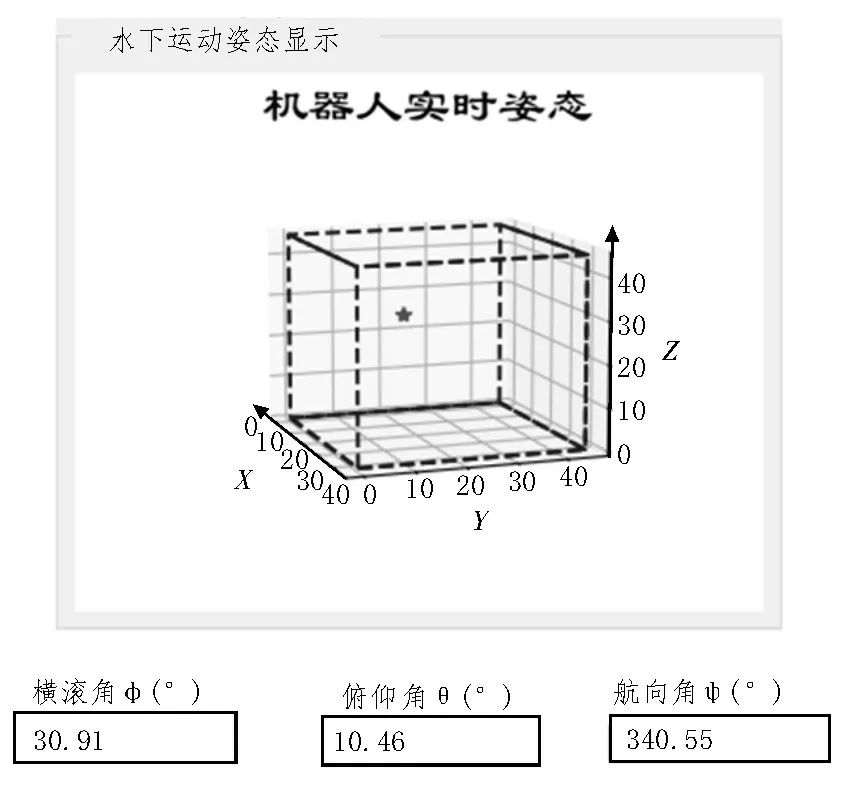
圖5 上位機(jī)軟件姿態(tài)界面
5 結(jié)論
該文對(duì)一款水下清洗機(jī)器人整體軟件設(shè)計(jì)進(jìn)行了詳細(xì)論述,基于Python 語(yǔ)言和PLC 梯形圖、SCL 結(jié)構(gòu)化語(yǔ)言對(duì)軟件關(guān)鍵功能模塊進(jìn)行了設(shè)計(jì)和代碼實(shí)現(xiàn),最后在水池測(cè)試了軟件功能。現(xiàn)場(chǎng)測(cè)試表明,軟件整體達(dá)到預(yù)期設(shè)計(jì)目標(biāo),下一步將進(jìn)一步優(yōu)化程序和完善軟件功能。
猜你喜歡
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
人大建設(shè)(2019年12期)2019-05-21 02:55:44
中山大學(xué)法律評(píng)論(2018年1期)2018-03-30 01:21:00
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
金秋(2017年4期)2017-06-07 08:22:16
環(huán)球時(shí)報(bào)(2017-03-30)2017-03-30 06:44:45
中國(guó)材料進(jìn)展(2016年10期)2016-12-26 06:50:20
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
中國(guó)衛(wèi)生(2015年3期)2015-11-19 02:53:32
