基于智能電動巡檢車輛的運行路徑跟蹤方法
2022-12-23 12:03:40欒奇麒官國飛楊慶勝李春鵬
電子設計工程 2022年24期
欒奇麒,官國飛,楊慶勝,李春鵬
(江蘇方天電力技術有限公司,江蘇南京 211100)
智能車輛是近年來新興起的技術,該技術將自動控制技術、模式識別技術和計算機技術融合,在實際應用中具有良好的應用效果。采用智能車輛跟蹤控制時,不僅能夠減輕巡檢人員的負擔量,同時也能提高巡檢的效率[1-2]。
目前,車輛運行跟蹤方法應用到多個領域,采礦、現場勘察都應用了車輛運行跟蹤方法,在路徑跟蹤中,采用的跟蹤控制理論包括現代、經典和智能三種控制理論。我國對于運行路徑跟蹤方法已經有相對成熟的研究,傳統路徑跟蹤方法多是利用導航控制器和模糊控制理論建立控制模型,消除穩態誤差[3-4]。車輛作為一個非線性系統,內部結構十分復雜,如果在車輛巡檢過程中,過度依賴控制模型,那么精確性會降低,車輛無法適應多變行駛環境,內部控制系統也不能滿足實際的要求。
綜上所述,該文在考慮車輛運行過程中的動力學問題,為了提升巡檢的效率,研究了一種新的非線性車輛動力學模型。引入跟蹤控制器,既能夠保證車輛按照正確路徑行駛,還能夠很好地實現跟蹤,提升巡檢的工作效率。
1 智能巡檢模型
巡檢車輛運行是影響巡檢效果的關鍵因素。其中,智能電動巡檢車輛的車速和橫擺運動是影響車輛運行的重要因素。在非線性智能電動巡檢車輛的動力模型中,智能巡檢車輛四個車輪的轉動方程如式(1)所示:

式中,Jw表示車輪的轉動慣量;r表示車輪的半徑;ωij表示轉動角速度;Tyrl表示車輪的驅動力矩;Txrl表示車輪的制動力矩。建立的車輛動力學模型如圖1 所示。
圖1 車輛動力學模型
根據車輛動力學模型構建智能巡檢模型。在絕對直角坐標系中,智能電動巡檢車輛的運動轉化方程如下:

式中,Vx和Vy分別對應智能電動巡檢車輛行駛速度在絕對指標坐標系中x軸和y軸上的速度分量[5-6]。
由于車輛行駛過程中,時常面對緊急避障情況,輪胎在高速行駛下常處于非線性運動區域。因此,該文基于Pacejka 的魔術公式構建輪胎模型,計算輪胎的縱向力和側向力,計算公式如下:

式中,x可以表示輪胎的側偏角或縱向力;根據x對應的物理數值,Y(x)可以表示輪胎的縱向力、側向力及回正矩;sh表示車輪的垂直偏移量;sx表示車輪的水平偏移量;A、B、C、D分別對應Pacejka 魔術公式中的參數,參數計算方式如下:
式中,參數a和b的取值可根據現場的實際測試結果進行相應調整。
考慮路面不平穩附著因素和輪胎的滑移條件,在采用輪胎模型對呈現出非線性運動的輪胎力學分析時,要充分考慮附著橢圓對魔術公式計算結果的影響,進而提升巡檢車輛在巡檢中的作用[7-9]。
2 智能巡檢信息獲取
智能運檢電動車與智能運檢車管控系統通過運檢車輛管控系統進行互聯。電動運檢車的基礎數據、巡檢行駛狀態數據、巡檢業務數據實時上傳到智能運檢車系統中。從而有效對車輛運行路徑狀態、充電狀態等數據進行實時跟蹤。巡檢過程中遇到的問題及時與指揮中心進行信息交互。指揮中心能及時對車輛、人員進行調度,并對運檢作業全過程進行實時監控,查看現場作業過程與設備狀態。其具備車輛信息查詢、車輛數據分析、車輛充電信息查詢、車輛指揮調度、指揮車智能管理、搶修工單管理、隱患、缺陷工單管理、無紙化作業票、車載安全工器具管理、巡線打卡查詢、安全督查、單兵設備管理、運檢數據全景展示的功能。智能電動巡檢車輛運行路徑信息獲取過程如圖2 所示。
圖2 智能電動巡檢車輛運行路徑信息獲取
2.1 巡檢信息采集
為將新能源電動車更好地投入到配網端的巡檢、搶修工作中,需對車輛運行路徑進行圖像采集,以實現巡檢信息的采集,實現巡檢過程中遇到問題及時與指揮中心信息交互,指揮中心及時對車輛、人員調度,查看現場作業過程與設備狀態,并對運檢作業全過程進行實時監控,提升巡檢效率。該文通過搭載光學變焦攝像頭和紅外熱成像攝像頭實現配網巡檢全過程記錄。將CCD 和CMOS 兩種型號的攝像頭作為智能電動巡檢車輛運行路徑圖像采集的主要設備,以便獲取豐富的運行信息[10-12]。CCD 攝像頭具有分辨率高、采集圖像清晰等優勢。CMOS 攝像頭集成了A/D 轉換器和圖像傳感器,能夠輸出多種格式的采集數據,且支持功能調試,相較于CCS 攝像頭適應性更強[13]。
2.2 數據二值化處理和去噪
針對CCD 攝像頭和CMOS 攝像采集的圖像數據中包含的黑線位置信息,為精準識別位置信息的具體內容,提升系統判斷的準確性,需對原始圖像數據進行二值化處理和去噪處理[14]。
設定某灰度值作為參考閾值,當輸入圖像的某個像素灰度值超過參考閾值時,該像素點視為白點,數值像素值為1;反之,則視為黑點,數值像素值為0,其二值化處理如下所示:

式中,t為參考閾值;f(x,y)和g(x,y)分別表示位于(x,y)位置上的像素點在處理前和處理后對應的像素值[15]。
2.3 巡檢行駛路徑中心線提取
該文采用行駛路徑邊緣檢測法提取當前巡檢行駛路徑中心線,保證智能巡檢的質量。首先,設定某一行圖像信息的中心點坐標,在指定范圍內,從左向右進行像素搜索,當像素值由白變黑時停止搜索,記錄該像素點為LeftB;然后,從右向左進行像素搜索,當像素值由白變黑時停止搜索,記錄該像素點為RightB。則當前巡檢路徑寬度為:

結束搜索,進行下一行圖像搜索,連接各行中心坐標,即可獲取當前行駛路徑的中心線。
3 智能電動巡檢車輛運行跟蹤
智能電動巡檢車輛運行跟蹤控制是進行車輛轉向控制和速度控制的核心,經過二值化處理和提取當前行駛路徑中心線中包含的當前行駛路徑,充分利用采集信息計算,實現對智能電動巡檢車輛的實時控制。
3.1 轉向控制
假設經過斷點修補后的中心線中包含n個總線點,設中心點的坐標為(x,y),采用最小二乘法重新擬合當前行駛路徑中心線,擬合后的當前行駛路徑中心線表達式為:

擬合后的行駛路徑中心線反映出了智能電動巡檢車輛的轉向信息,定義智能電動巡檢車輛轉向的參考偏差為err,則err的表達式為:

式中,l表示行數。通過計算小車在l的實際轉向角與預測轉向角的差值,對比轉向參考偏差,為智能電動巡檢車輛的轉向控制提供依據,并采用PD 控制算法對車輛的轉角進行控制,控制量為:

通過直線擬合后計算巡檢時控制量,確定巡檢最佳方案。
3.2 車速控制
針對智能電動巡檢車輛的車速控制采用閉環控制法,以增量式PID 算法為基礎對直流電機的轉速控制,有效提升車輛巡檢的有效性。通過提取車速檢測模塊中車輛的實時速度信息,結合當前行駛路徑的狀態和車輛行駛情況,計算出最適合當前巡檢路徑行駛的期望速度值,期望速度值為:

式中,vmax表示在可行范圍內車輛的最大期望速度值;Δθ為轉向角的變化值;P為比例系數。
當智能電動巡檢車輛遇到緊急轉彎等情況時,車輛的轉角量發生急劇變化,智能電動巡檢車輛將在增量式PID 算法的調節下減速行駛,保證智能電動巡檢車輛行駛的安全性和穩定性,有效控制了巡檢的效率[16]。
4 實驗研究
為驗證該文提出的智能電動巡檢車輛運行路徑跟蹤方法的有效性,選用該文提出的跟蹤方法和傳統跟蹤方法進行實驗對比,設定實驗參數如表1所示[17]。
表1 實驗參數
為確保驗證的準確性,選用該文路徑跟蹤方法和傳統跟蹤方法對雙移線巡檢道路曲線跟蹤,利用邊界約束條件確定分段曲線和直線,實現擬合。在車輛巡檢過程中,該文跟蹤方法和傳統跟蹤方法對直線都有很好的跟蹤效果,但在曲線道路上,傳統跟蹤方法的跟蹤能力較差。實驗結果如圖3 所示。
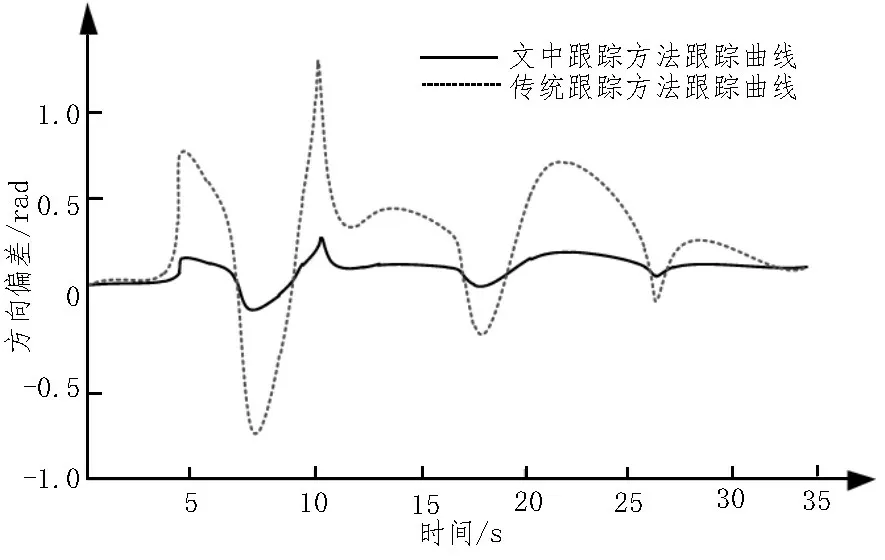
圖3 跟蹤方向偏差實驗結果
根據圖3 可知,該文智能電動巡檢車輛運行路徑跟蹤方法跟蹤能力要優于傳統路徑跟蹤方法。傳統路徑跟蹤方法跟蹤過程很容易受到外界因素干擾,在跟蹤過程中,一旦車輛出現避障行為脫離原始的軌道很難預控,得到跟蹤曲線偏角與實際偏角的吻合程度相差較大。該文路徑跟蹤方法設置最大期望值,在巡檢車輛內部擁有獨立的數據庫,很好地判定車輛是否出現偏差,保證跟蹤過程的穩定性。
在驗證跟蹤位移偏差實驗結果時,該文同時對低速、中速、高速三種情況的車輛巡檢速度進行仿真,得到的跟蹤位移偏差實驗結果如圖4 所示。
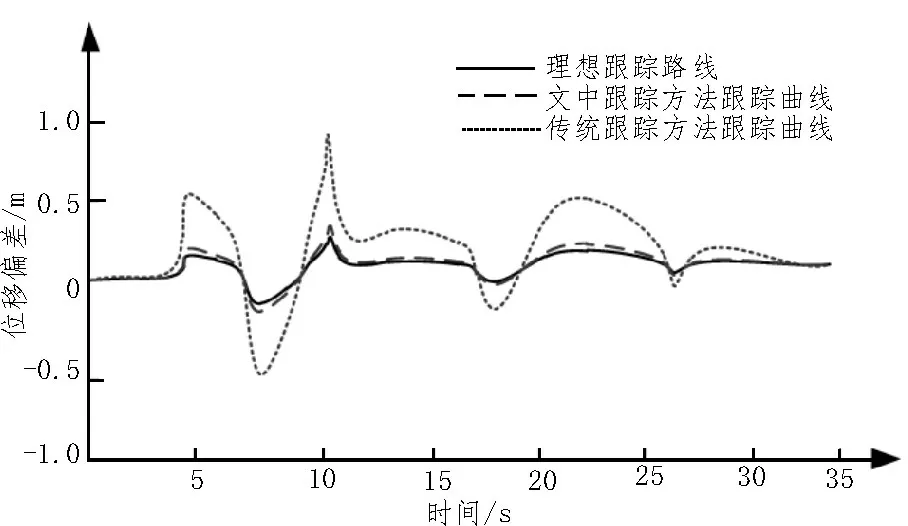
圖4 跟蹤位移偏差實驗結果
根據圖4 可知,當車輛處于低速時,該文跟蹤方法和傳統跟蹤方法的跟蹤能力都相對較強,對于車輛的跟蹤精度很高,能夠很好把握車輛巡檢速度;然而隨著跟蹤車輛速度的增加,傳統跟蹤方法很難判定車輛不斷調整的路徑曲線,跟蹤結果的橫擺角速度也不夠穩定,整個行駛過程穩定性相對較低,而該文方法僅僅在車輛速度特別高時,才存在較小的跟蹤位移偏差。
5 結束語
該文分析車輛的實時性特點,根據車輛的非線性特征確定運動學模型,通過運動學模型分析位置誤差,利用模糊自適應PID 控制器更好地調整車輛的運行方向。實驗表明,該文提出的跟蹤方法對車輛有很好的跟蹤能力,可以確保巡檢質量。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
