噴漿機器人自適應噴涂路徑規劃研究
2022-12-24 07:19:56徐劍安賈連輝荊留杰李光朋任月曉李開放
隧道建設(中英文) 2022年11期
徐劍安,賈連輝,荊留杰,李光朋,任月曉,李開放
(中鐵工程裝備集團有限公司,河南 鄭州 450016)
0 引言
隨著中國綜合國力的提升,近15年來,中國鐵路隧道發展極為迅速,共建成鐵路隧道9 260座,總長約15 316 km(占中國鐵路隧道總長度的78%)[1]。但是隧道建設中地質條件復雜、施工環境惡劣及降效問題與人口紅利退散矛盾日漸突出。支護作為隧道施工的關鍵一環,直接影響隧道安全,而噴漿是支護工序中保證支護強度及質量的重要環節[2-3]。在當前矛盾下,增加支護作業噴漿操作人員已無法滿足可持續降低成本和隧道建設高質量、高標準的客觀需求,發展隧道噴漿智能化裝備是解決矛盾的根本途徑。
混凝土噴漿工藝作為噴漿作業基礎,決定隧道噴漿裝備發展方向。從干噴到濕噴的發展過程,大幅提升了支護工程質量和支護結構可靠性,濕噴工藝改良推動了噴漿裝備機械化、智能化進程,為噴漿裝備研發工作者提供了新的思路[4-8]。由于噴漿工藝的改進,國內外針對噴漿裝備研究經歷了從側重控制算法到逐漸偏向感知與規劃技術上。國外自20世紀60年代起步入裝備機械化時代,早期各國已對關節型機械深入研究,將噴漿機械手分數階模糊比例積分控制跟蹤方法、自適應分數階PID算法應用于噴漿機械手臂控制,以做到精準的機械化過程控制。文獻[9-12]在三維定位系統以及傳感器數據采集技術基礎上提出實時調整噴射軌跡來控制噴射質量的方法,極大地提高了噴射作業的效率和質量,為智能化噴漿機器人提供了新思路。國內在20世紀60年代由水利、冶金等部門牽頭,歷經60年發展,對國外技術兼收并蓄,從控制算法、實時感知與規劃、泵送調節3個方面進行突破:張新榮等[13]對機械臂運動學與動力學進行研究,改善了噴漿機械手的控制精度;韓斌等[14]將ANN-PSO-GA模型應用在濕噴混凝土強度預測及配合比優化中,改善了濕噴設備在泵送調節方面的智能化升級;劉在政等[15]提出了噴射路徑規劃方法,結合感知端對不同區域超欠挖情況的獲取結果,對噴射量參數動態控制做到感知與規劃。以上研究成果為國內企業以噴漿設備為核心的配套產品提供了技術支持。
工業物聯網、人工智能、大數據等新興技術的發展,有效推動了噴漿機械手向數字化、智能化的方向發展,噴漿作為支護的一個重要環節,也面臨環境精確感知難、噴涂效果評價難、噴涂路徑規劃復雜3大重點難題。本文在分析混凝土噴漿技術行業現狀和痛點的基礎上,研究混凝土噴漿設備感知識別關鍵技術,設計一種隧道巖壁特征物識別方法,實現鋼拱架位置的精確感知;針對自適應開挖輪廓的噴涂區域規劃關鍵技術進行研究,提出一種單拱架單片段噴涂區域輻角規劃,基于拱架識別的多拱架復合區域規劃和最優噴涂路徑規劃方法,以完成臂架的精準控制。
1 隧道混凝土噴漿技術痛點
近年來,高原隧道項目日漸增多。結合高原隧道環境施工特點,國內學者對鉆爆法工法和鉆爆法機械化配套設備在高原環境下的適應性開展了相關研究[16-19]。噴漿機器人作為支護環節重要配套設備,對施工安全起著關鍵作用。“科技引領、重視環境、安全智能”的規劃理念對噴漿技術智能升級提出了更高要求,即需要圍繞安全、高效噴漿作業為目標。噴漿機器人從機械化向智能化發展需要軟硬件系統高可靠、地質環境的高自適應性與感知性、工序作業高耦合性[20]。要實現設備智能化,依據自主決策實現系統的自動化運行,整個智能化升級亟需解決以下問題。
1.1 復雜工況智能感知與識別
依據國內外施工經驗,支護噴漿作業面拱架間距與數量、拱架類型(工字鋼、花拱鋼)以圍巖等級為標準,靈活調整施工策略;同時,開挖斷面輪廓也區分為全斷面、一臺階和二臺階法,靈活復雜的現場工況對機器人感知端的感知效率和準確度提出更高要求[21]。智能感知是智能化升級的基礎,作為噴漿機器人的“眼睛”,承擔噴漿機器人對隧道環境及噴涂結果的數據獲取任務,直觀、高效、快速的感知手段是智能化升級所需要達到的指標。在感知端獲取現場工況后,噴漿機器人需對不同工況進行識別,復雜的工況對應著龐大的數據特征庫,感知終端上傳原始數據,智能識別提取數據特征值并對比數據特種庫,給出識別結果。整個流程的實現對準確率、運算速度提出更高的要求。
1.2 噴涂路徑規劃
噴涂路徑規劃路線的選擇直接影響自動化噴涂過程中的回彈量、剝落量,決定噴涂的安全和穩定。現階段主流噴涂路徑規劃分為4個噴涂駐足點進行噴涂,其中,噴射順序不會因為工況改變而調整,但噴射距離、噴射角度和噴涂移動路線均會受到不同工況影響,進而影響噴涂效果。根據感知識別工況結果自適應規劃噴涂路徑是智能化道路上必須解決的問題[22]。
2 感知與路徑規劃技術研究
2.1 智能感知與識別
2.1.1 車體定位
三維掃描裝置多次采集點云的過程中,每次掃描的點云數據都是基于臺車坐標系,因此需要將所有獲取的三維點云數據從臺車坐標系轉換到大地坐標系:
(1)

已知臺車上的2點P1和P2在臺車坐標系下的位置為BP1和BP2,全站儀測出在大地坐標系下的坐標為AP1和AP2。通過臺車上安裝的傾角儀測出臺車坐標系相對于大地坐標系的前向傾斜角α和橫向傾斜角β,通過已知的BP1、BP2、AP1、AP2、α和β求出
(2)
2.1.2 超欠挖檢測
研究基于激光點云的隧道超欠挖檢測方法,通過三維掃描裝置多次設站掃描獲取整個隧道的三維點云數據,通過全站儀將所有位置掃描的點云轉換到同一大地坐標系下,運用投影法和RANSAC算法計算隧道的中軸線,提取隧道截面,將截面內點云轉換到平面坐標系中,將各點到隧道截面圓心的距離與理論半徑對比,獲取隧道截面的超欠挖區域。實際輪廓與設計輪廓效果對比圖如圖1所示。點云與設計輪廓的距離
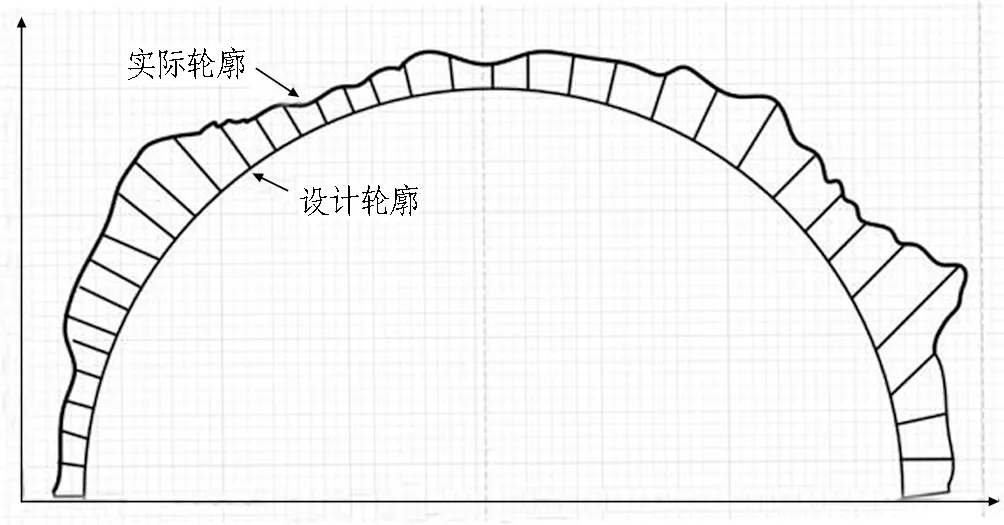
圖1 實際輪廓與設計輪廓效果對比圖
(3)
式中:xxoy和yxoy為實際隧道界面點云數據的坐標;xr和yr為隧道界面圓心;r0為隧道設計半徑;d>0表示超挖,d<0表示欠挖。
實際輪廓線相鄰2點A、B及A、B在設計輪廓線上的垂足近似1個直角梯形,超欠挖量就等于梯形面積:
(4)
(5)
式(4)—(5)中:dA、dB分別為實際輪廓上A、B兩點到設計輪廓的距離;hCD為實際輪廓測量高度。
以此類推計算整體超欠挖量。
2.1.3 拱架識別
研究一種基于特征變換的隧道拱架點云自動提取識別的方法。獲取立過拱架的隧道開挖面點云P,對點云P進行預處理和去冗余處理,得到消除冗余數據的隧道點云P2。
構建以開挖方向為X軸的空間坐標系CS,剔除隧道點云P2的地面點,獲取不含隧道底部數據的隧道點云P3,將隧道點云P3所在的隧道點云坐標系記為原始隧道點云坐標系C0。計算原始隧道點云坐標系C0與空間直角坐標系CS之間的變換矩陣
T=C0-1CS。
(6)
根據所述變換矩陣T,將隧道點云P3變換為空間直角坐標系CS下的隧道點云P4。將隧道點云P4投影到以開挖方向為法向的平面上,得到平面直角坐標系下的二維隧道點云P5,并構建三維隧道點與二維隧道點之間的映射關系f1,見式(7)。
P5=f1(P4)。
(7)
統計二維隧道點云P5的點密度信息,選取n個密度區間,使用DBSCAN算法對二維隧道點云P5按照n個點密度區間依次由高到低進行自動聚類分割,得到若干個不同的點云子集{Si},i為點云子集的序號;然后,統計每個點云子集包含的點數,將點數最多的點云子集Sl作為隧道側壁投影在平面上的點云。根據點云Sl擬合最優橢圓弧E,得到橢圓弧E的數學模型,采用橢圓圓弧的一般方程公式:
C1x2+C2y2+C3xy+C4x+C5y+C6=0。
(8)
以橢圓弧E為基準裁剪點云子集Sl,得到平面直角坐標系下的點云Sj。其中,線性規劃的數學曲線為:
F(x,y)=C1x2+C2y2+C3xy+C4x+C5y+C6。
(9)
將點云Sj按照橢圓弧E展開為直線進行坐標變換,得到平面點云Sk,并構建點云坐標變換前后點的映射關系f2。根據映射關系f1和映射關系f2,得到點云Sk對應的深度信息,進而將點云Sk擴展為空間直角坐標系下的點云Pk。利用點云的地面濾波算法將點云Pk分割為隧道側壁點云Ps和拱架點云Pg。根據拱架點云Pg采用聚類分割獲取單個拱架點云Pmf(m為拱架的序號),然后根據變換矩陣T、映射關系f1和映射關系f2計算得到各個拱架點云在原始隧道點云坐標系C0下的坐標。
2.2 噴涂路徑規劃
2.2.1 自適應開挖輪廓的噴涂區域規劃技術研究
隨著地質變化,施工方為保證施工效率與安全,會適當調整開挖斷面輪廓和立拱數目。為提高智能化噴漿機器人對不同地質巖層施工的適應性,需要合理調整其噴涂區域規劃,以適應變化的開挖斷面輪廓或立拱情況。
研究如何根據開挖斷面輪廓來完成噴涂區域的規劃。首先,對開挖輪廓做預處理,用參數描述多段圓弧或直線構成的輪廓;其次,對單拱架單片段輪廓進行輻角規劃,確定該片段的N個噴涂子區域噴射輻角;最后,將由多拱架組成的完整待噴面劃分成M個單一拱架,最后得到N×M個噴涂區域,其過程如圖2所示。
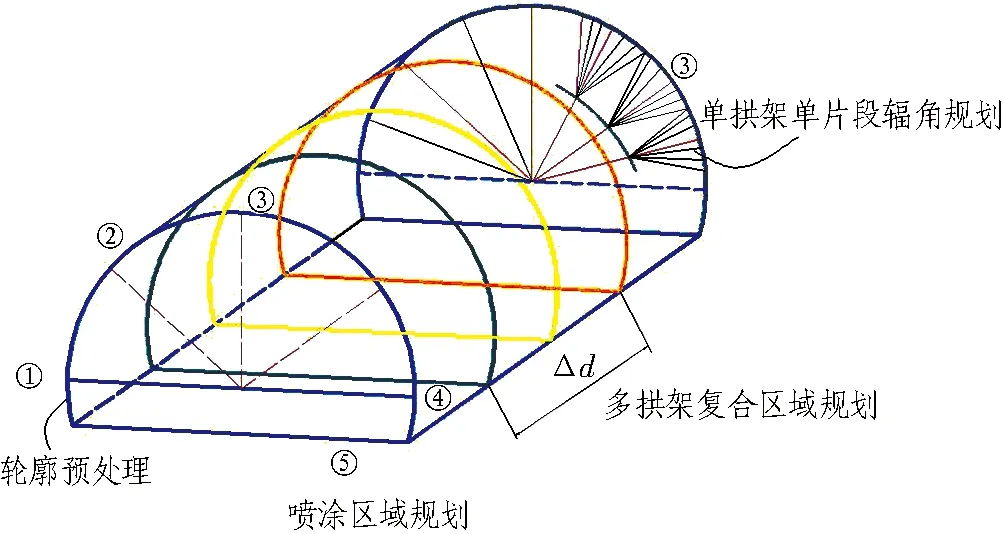
圖2 自適應噴涂區域規劃原理圖
在系統導入的第三方.dp文件中,對輪廓的描述是分片段式的,如圖3所示。片段按順時針旋轉,每個片段由起點坐標Ps、終點坐標Pe、曲率k、半徑R、圓心O、起點輻角A1和終點輻角A2表示,即
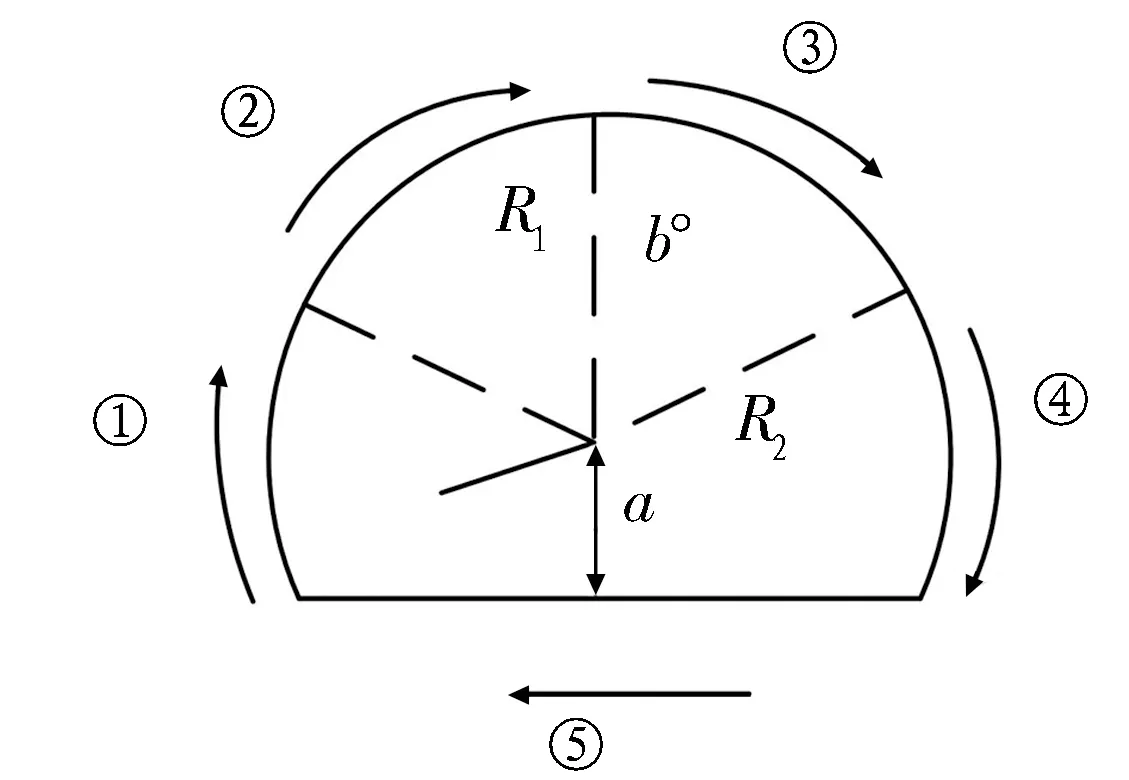
圖3 片段式描述的開挖輪廓
seg=[Ps,Pe,k,R,O,A1,A2]。
(10)
2.2.1.1 單拱架單片段噴涂區域輻角規劃
相鄰噴涂區域會由于邊界重疊造成噴涂時間和方量過多,導致邊界區域噴涂厚度增加而不滿足初步平整度要求,因此,需要合理規劃每個噴涂區域Si的輻角范圍Δα,使得相鄰噴涂區域既緊密相接又不相互覆蓋,如圖4所示。
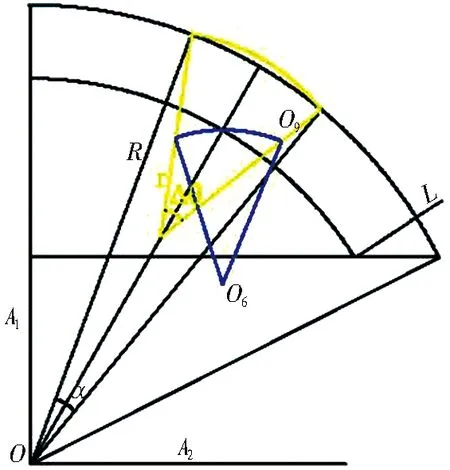
圖4 噴涂區域輻角位置規劃
在自動噴涂中,根據超欠挖量或目標涂層厚度的要求,在噴槍刷動速度和噴刷范圍Δθ一定時,可通過調整噴槍到待噴面的距離l保證涂層厚度,提高作業效率。顯然,噴槍距離l、噴刷范圍Δθ影響相鄰噴涂區域的邊界,由此建立輻角范圍Δα和噴槍距離l、噴刷范圍Δθ的對應模型,即
α=f(l,Δθ)。
(11)
根據圖4所示的幾何關系,將噴槍回轉中心近似為臂架末端中心,則可得到噴涂區域輻角模型
(12)
式中:r為噴槍長度;R為待噴輪廓片段半徑。
當片段的起點和終點輻角分別為A1、A2時,則該片段的噴涂區域數目
N=round[(A1-A2)/α]。
(13)
則該片段內,噴嘴位置對應的輻角
βi=A1+α/2-iα。
(14)
此時對應的噴槍回轉關節角度為:
θ7i=180°-βi;
(15)
θ8i=90°。
(16)
噴嘴位置
(17)
由此,可以由單片段參數、噴嘴輻角、噴嘴位置和噴槍回轉角度來定義每個噴涂區域si:
(18)
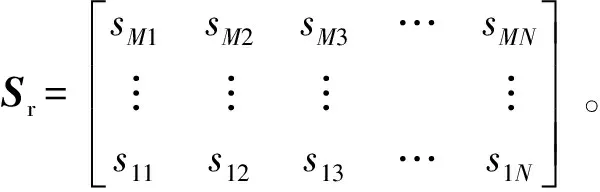
對單拱架單片段來說,共有N個噴涂區域,記為
S=[s1,s2,s3,…,sN]。
(19)
2.2.1.2 基于拱架識別的多拱架復合區域規劃
通常情況下,一次噴涂作業循環中包含多個拱架,由此需要將單拱架的N個噴涂區域擴展成多個拱架的噴涂區域。假設拱架識別結果如圖5所示,則應在相鄰兩榀拱架之間擴展待噴涂的拱架位置,以完成對拱架間區域的完全填充。
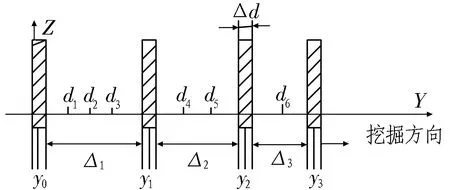
圖5 拱架識別結果圖
擴展時只用將識別出的拱架沿隧道掘進方向偏移一定的距離di即可,偏移量di的選擇原則如下:
Δi=(yi-yi-1)-Δd。
(20)
當Δi≤600時,
(21)
當600<Δi≤1 000時,
(22)
當Δi>1 000時,
(23)
對本次噴涂作業循環來說,每個輪廓片段可以由擴展出來的M個拱架的N個噴涂區域組成,記為
(24)

2.2.2 最優噴涂路徑規劃技術研究
噴涂區域劃分完成后,還不能指導噴槍的運動,只有將由二維矩陣表征的噴涂區域轉換成一維數組,才能得到一條完整的噴涂路徑。最優路徑規劃的規則為:起始段需完成對拱架根部的噴涂,然后從下往上連續噴涂,且相鄰噴涂區域臂架的運動量最少。由此,可以先從噴涂區域中劃分出拱架基部進行噴涂,然后依據從下往上、沿拱架方向的原則連續噴涂完非拱架基部區域。最優噴涂路徑規劃原理如圖6所示。
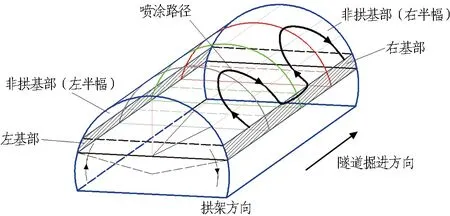
圖6 最優噴涂路徑規劃原理圖
2.2.2.1 優先拱架基部區域的鎖腳路徑規劃
先噴拱架的左、右基部可以保證噴涂過程的安全和穩定。從輪廓中分割出拱架的左、右基部進行噴涂,再將剩余的非拱架基部劃分成大區域,依據路徑連續原則進行噴涂,可以達到先鎖腳再噴涂的目的。以上臺階開挖方式為例規劃鎖腳路徑,下臺階和全斷面開挖方式與此類似。
從上臺階輪廓始、末片段中分割出拱架的右基部和左基部,設右基部到底板的高度為hr,左基部到底板的高度為hl,原始輪廓的始、末片段如圖7所示。
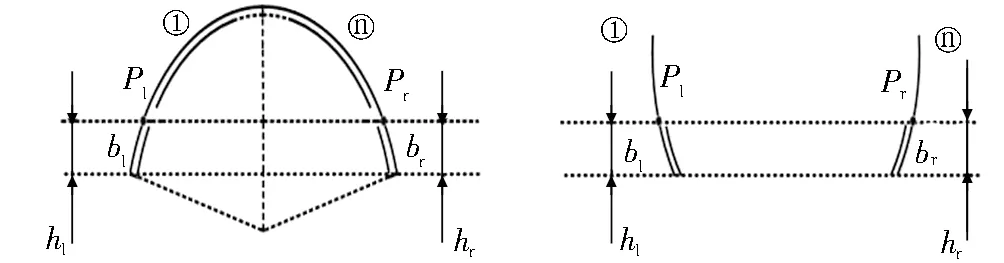
圖7 上、下臺階始、末片段示意圖
其中:
2.2.2.2 非拱架大區域劃分
拱架基部分割后,上臺階輪廓剩余片段均勻分布于隧道左、右半幅,如圖8所示。
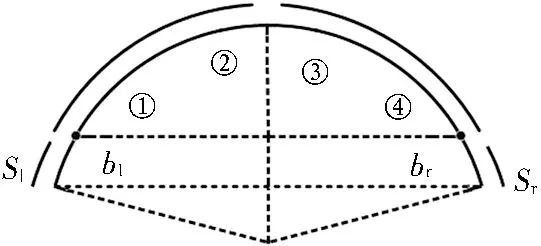
圖8 噴涂區域輻角位置規劃
根據輪廓片段的噴涂區域規劃,可以得到所有片段的噴涂區域矩陣。左、右拱架基部噴涂矩陣記為
(25)
(26)
非拱架基部噴涂區域矩陣記為
(27)
若鎖腳過程是先噴涂右拱架基部sr,后左拱架基部sl,則排序結果為:Sr、Sl、S。
2.2.2.3 減少剝脫量的自下而上的噴涂路徑規劃
噴涂過程中,附著的泥漿會因為支撐力不夠而剝脫,造成凹陷點,需用人工補涂。自下而上的噴涂路徑,使得先噴區域的附著泥漿能夠支撐后附著的泥漿,可顯著減少剝脫量。
根據輪廓的片段描述,開挖輪廓始、末方向沿順時針旋轉,則輪廓左半幅的區域規劃矩陣Si依序從下往上排列,而右半幅的區域規劃矩陣Si依序從上往下排列,如圖9所示。顯然,右拱架基部的區域規劃矩陣Sr按行倒排序,即可調整為從下到上的順序。
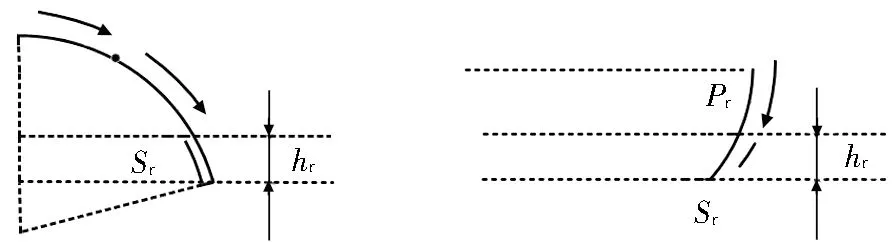
圖9 開挖輪廓的右半幅
同理,對非拱架基部的右半幅區域的片段噴涂矩陣按行倒排序,也能調整成自下而上的順序:
(28)
大部分情況下,在輪廓左、右半幅的輪廓片段不只一個,則右半幅的輪廓片段也需要倒排以調整成從下而上的順序,即

(29)
或者更一般的為

(30)
2.2.2.4 減少剝脫量的自下而上的噴涂路徑規劃
拱架基部的噴涂路徑沿隧道掘進方向,則鎖腳效果更快更好,而非拱架的噴涂路徑沿拱架方向,則能顯著減少直噴拱架的時間。因此,需要對拱架基部、非拱架基部的噴涂區域矩陣分別完成行、列排序處理。
根據噴涂區域規劃原則,噴涂區域矩陣S的每行表示同一拱架,每列表示同一噴射輻角,為獲得連續的噴涂路徑,拱架基部按列排序且首尾相連,對矩陣處理的順序如圖10所示;非拱架基部按行排序且首尾相連,對矩陣處理的順序如圖11所示。
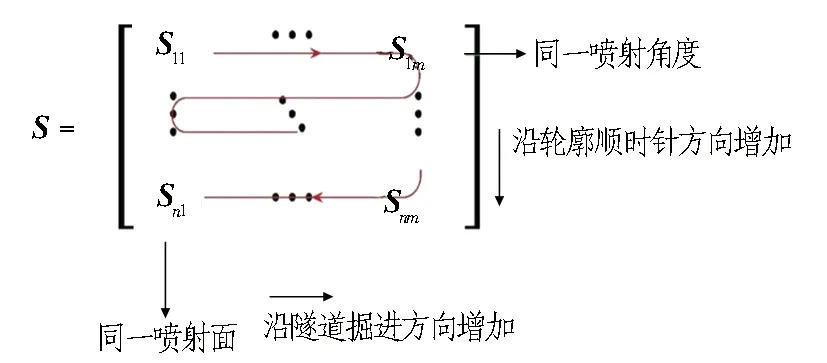
圖10 拱架基部沿掘進方向的噴涂路徑

圖11 非拱架基部沿拱架方向的噴涂路徑
根據最優噴涂路徑,制定優先鎖拱腳、自下而上、沿拱架或掘進方向的噴涂路徑規則。即從輪廓首、尾片段中先分割指定高度的拱架左、右基部,再調整非拱架輪廓片段順序,最后調整噴涂區域規劃矩陣的行列順序,得到一條完整、連續的噴涂路徑。
3 工程實踐與應用
智能噴漿機器人對上述關鍵技術進行突破,解決現階段行業內痛點,在康定公路郭達山和任家溝隧道現場實踐應用。康定公路地處高原海拔3 800 m,隧道施工條件苛刻,工作環境惡劣,屬于典型的高原隧道。針對現場施工數據對車體定位、臂姿測量、噴涂軌跡規劃3個部分分析,精度符合設備研究標準,噴涂質量滿足現場要求。
3.1 車體定位精度
對郭達山隧道進行多次車體定位試驗,試驗結果均滿足設計要求,車體定位數據如表1所示。因現場施工條件原因,Z方向定位精度相對X和Y方向較差,其最大定位誤差為44 mm,誤差滿足設計標準中定位誤差均值<15 mm,定位誤差標準差<30 mm,車體定位精度<50 mm要求,具體數據與誤差分析數據如圖12和圖13所示。
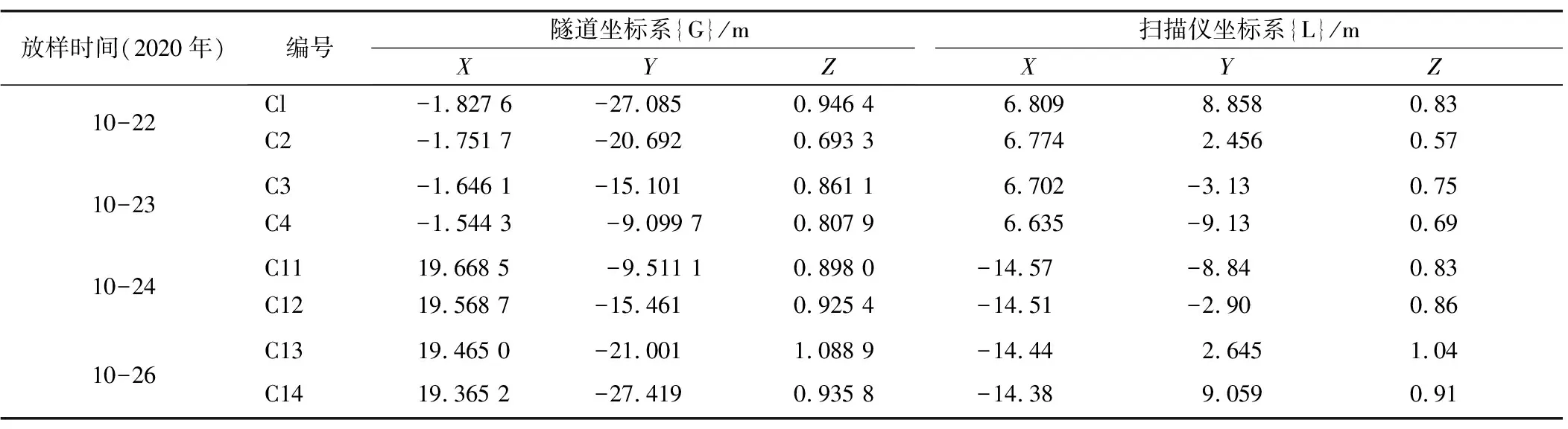
表1 郭達山隧道車體定位數據表
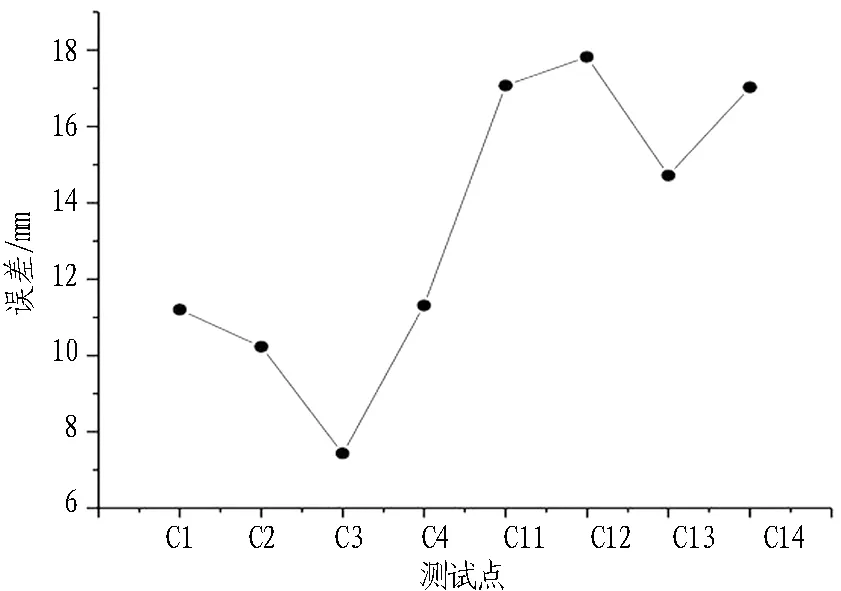
圖12 隧道坐標系與掃描儀坐標系點位距離誤差圖

圖13 三軸坐標距離誤差圖
3.2 臂架末端精度
完成任家溝隧道噴漿機器人施工數據分析,計算末端標記點理論值并與全站儀的實測值進行對比,任家溝隧道臂架末端實測與計算誤差如圖14所示。分析數據發現,X、Y、Z方向分布呈現一定規律,重新補償校零,經撓度補償算法計算后,輸出X方向誤差減小到20 mm以內,Y方向誤差減小到20 mm以內,Z方向誤差減小到50 mm以內。補償校零后任家溝隧道臂架末端實測與計算誤差如圖15所示。
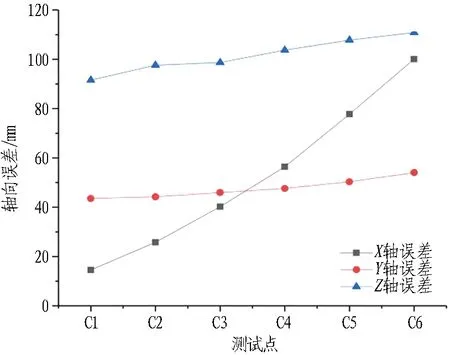
圖14 任家溝隧道臂架末端實測與計算誤差
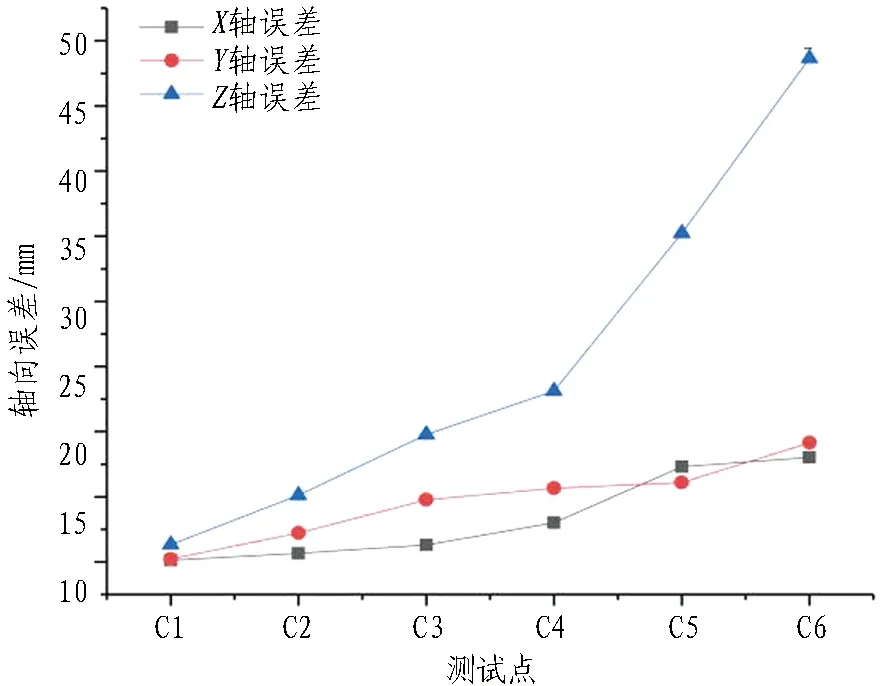
圖15 補償校零后任家溝隧道臂架末端實測與計算誤差圖
3.3 噴涂軌跡規劃
現場自動噴涂過程覆蓋左右拱基及非拱基,噴涂軌跡依據噴涂規劃算法對臂架、噴槍、泵送等進行運動控制,完成噴涂作業。臂架末端和噴槍位姿仿真軌跡如圖16所示,隧道作業現場如圖17所示。
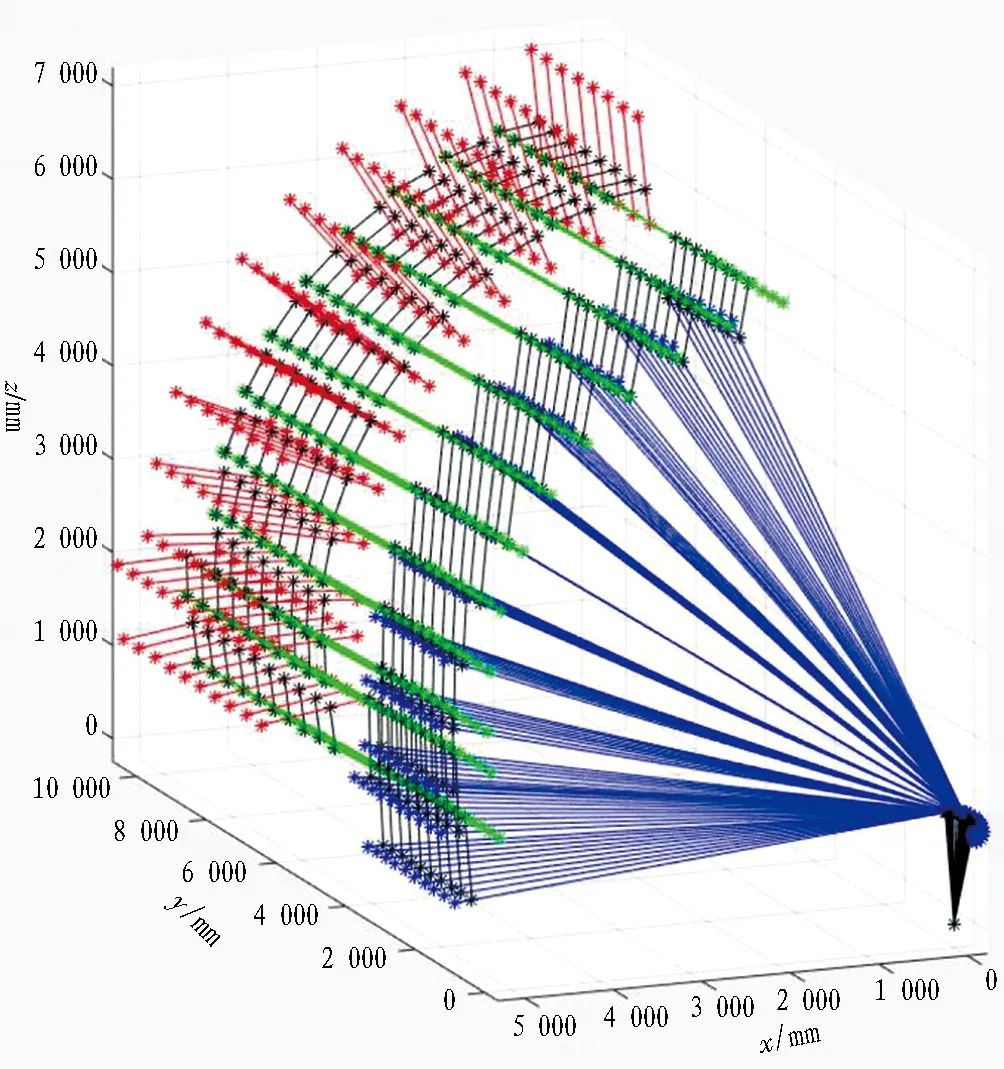
圖16 臂架末端和噴槍位姿仿真軌跡圖

圖17 隧道作業現場圖
4 結論與討論
噴漿機器人作為新型智能化設備,對比人工噴漿和傳統的噴漿機械手在感知識別與路徑規劃方面均實現了突破,主要結論如下:
1)針對復雜工況,實現利用三維掃描裝置對設備位置、隧道輪廓、拱架類型等進行感知,提取各感知目標特征值,對比特征值數據庫,完成感知結果分析識別,為路徑規劃提供準確有效現場工況信息,減少作業人員數量,提升系統整體可靠性。
2)實現感知識別反饋結果路徑規劃,通過自適應噴涂算法和最優噴涂路徑算法,對噴涂策略、軌跡進行整體規劃,提升隧道壁噴漿作業面施工質量,減少現場工作人員工作難度。
3)噴漿機器人在康定公路任家溝隧道和郭達山隧道進行了實戰應用,感知識別與路徑規劃誤差均在設計范圍內,滿足系統設計要求,噴涂作業質量對比人工和其余機械化設備有較大提升,機器人按照規劃路徑自主完成噴涂作業也減少了現場人員工作強度。
噴漿機器人智能化升級任重而道遠,根據研究和現場實際試驗,機器人在極惡劣環境下的控制問題和實時定位2個技術難點上仍有較大優化升級空間。當機器人所處隧道環境極其復雜,作業人員無法進入噴漿工作面操作設備,遠程操控技術可有效解決;機器人隧道中的定位系統目前仍依靠設備測量,根據測量結果進行隧道定位,操作過程費時復雜,而新興定位技術的成熟和發展為隧道內定位提供了新的思路,自動實時的臺車定位能為機器人提供快速高效的定位信息。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28