基于傳感布置優(yōu)化的履帶車輛振動(dòng)測(cè)試系統(tǒng)
2023-01-05 10:48:20楊書儀廖力力覃凌云戴巨川陳哲吾何興云仝寧可
兵工學(xué)報(bào) 2022年12期
楊書儀, 廖力力, 覃凌云, 戴巨川, 陳哲吾, 何興云, 仝寧可
(1.湖南科技大學(xué) 機(jī)電工程學(xué)院, 湖南 湘潭 411201; 2.長(zhǎng)沙金維信息技術(shù)有限公司, 湖南 長(zhǎng)沙 410006;3.江麓機(jī)電集團(tuán)有限公司, 湖南 湘潭 411201;4.蘇州韋博試驗(yàn)儀器有限公司, 江蘇 蘇州 215000)
0 引言
履帶車輛由于具有接地比壓小、牽引附著能力強(qiáng)等優(yōu)點(diǎn),在現(xiàn)代農(nóng)業(yè)、軍事、建筑等領(lǐng)域發(fā)揮著重要作用[1-2]。履帶車輛行走系統(tǒng)通常由主動(dòng)輪、負(fù)重輪、誘導(dǎo)輪、履帶、托帶輪、履帶張緊機(jī)構(gòu)等組成。履帶車輛在野地、陡坡以及壕溝等工況下工作時(shí),地面不平所帶來的振動(dòng)、沖擊會(huì)通過履帶傳遞到負(fù)重輪、懸掛系統(tǒng)、車身以及其他操作機(jī)構(gòu),這不僅會(huì)加速履帶車輛主要零部件疲勞失效,還會(huì)降低車輛配備儀器使用精度和可靠性,甚至對(duì)駕乘人員身心健康產(chǎn)生嚴(yán)重影響[3-5]。履帶車輛擁有良好的抗振性能是其使用壽命長(zhǎng)、運(yùn)行可靠、乘坐舒適度高的重要保障指標(biāo)之一。開展履帶車輛振動(dòng)特性測(cè)試是掌握其抗振性能影響因素的重要途徑,也可為履帶車輛抗振性結(jié)構(gòu)設(shè)計(jì)、輕量化設(shè)計(jì)提供實(shí)踐指導(dǎo)。
目前,在大尺寸結(jié)構(gòu)件振動(dòng)測(cè)試中,因傳感器布置冗余或者布置數(shù)量過少而導(dǎo)致測(cè)試結(jié)果誤差大等問題,引起了眾多學(xué)者的關(guān)注。傳感布置優(yōu)化本質(zhì)是一種組合優(yōu)化,即將有限數(shù)量傳感器分配至結(jié)構(gòu)自由度節(jié)點(diǎn)上。通常采用遺傳算法、粒子群優(yōu)化(PSO)算法以及深度學(xué)習(xí)等智能優(yōu)化算法可以有效提高尋優(yōu)精度,更好地解決工程實(shí)際問題。文獻(xiàn)[6-7]采用不同的智能算法對(duì)傳感器布局進(jìn)行研究。文獻(xiàn)[8]針對(duì)復(fù)雜地形下的多傳感器多目標(biāo)優(yōu)化部署問題,提出基于多目標(biāo)局部變異- 自適應(yīng)量子PSO算法。文獻(xiàn)[9-10]分別提出了基于Kalman多輸入估計(jì)的最優(yōu)傳感器布置方法和基于頻率響應(yīng)函數(shù)的傳感器布置方法。文獻(xiàn)[11]利用PSO算法解決齒輪箱故障檢測(cè)中傳感器優(yōu)化布置問題,并通過試驗(yàn)驗(yàn)證了方法的可行性。文獻(xiàn)[12]提出一種定位算法對(duì)不均勻網(wǎng)絡(luò)中傳感布置進(jìn)行優(yōu)化。文獻(xiàn)[13]提出一種多目標(biāo)傳感器布置優(yōu)化方法,可有效處理傳感器對(duì)空間動(dòng)態(tài)載荷的測(cè)量。
本文擬以履帶車輛為研究對(duì)象,提出一種慣性權(quán)值遞減協(xié)同學(xué)習(xí)因子呈指數(shù)函數(shù)特征的非線性調(diào)整策略,并從尋優(yōu)精度和穩(wěn)定性方面與標(biāo)準(zhǔn)PSO算法、文獻(xiàn)[14]和文獻(xiàn)[15]所提算法進(jìn)行對(duì)比分析,結(jié)合履帶車輛有限元模態(tài)分析,開展振動(dòng)加速度傳感布置優(yōu)化計(jì)算,采用MATLAB和LabView混合編程方式,設(shè)計(jì)集傳感布置優(yōu)化于一體的履帶車輛振動(dòng)測(cè)試系統(tǒng)。
1 履帶車輛振動(dòng)傳感布置優(yōu)化理論
履帶車輛車身質(zhì)心垂向加速度和繞質(zhì)心軸俯仰角加速度通過半車模型可以描述,因而本文擬采用履帶車輛半車為研究對(duì)象,運(yùn)用動(dòng)力學(xué)微分方程描述其振動(dòng)狀態(tài)為

(1)
(2)

系統(tǒng)特征方程為
Kφi=λiMφi,i=1,2,…,n
(3)
式中:λi和φi分別為第i階模態(tài)的特征值和振型向量。由系統(tǒng)特征方程計(jì)算出有限元處理后的結(jié)構(gòu)總模態(tài)矩陣:φ=[φ1,φ2,…,φn]。通過優(yōu)化B、Φ的取值即優(yōu)化傳感器布置,可使得傳感器測(cè)量響應(yīng)中各階目標(biāo)模態(tài)相互獨(dú)立并盡可能獲取較多的模態(tài)信息[16]。
本文采用模態(tài)置性準(zhǔn)則(MAC)[17]作為傳感布置優(yōu)化準(zhǔn)則,MAC矩陣元素計(jì)算公式為
(4)
式中:φi和φj分別為第i階和第j階模態(tài)向量。
2 履帶車輛振動(dòng)傳感布置優(yōu)化算法設(shè)計(jì)
2.1 PSO-IWLF算法
本文采用一種慣性權(quán)值遞減協(xié)同學(xué)習(xí)因子呈指數(shù)函數(shù)特征的非線性調(diào)整策略,將這種改進(jìn)算法稱為慣性權(quán)值協(xié)同學(xué)習(xí)因子非線性動(dòng)態(tài)調(diào)整PSO(PSO-IWLF)算法[18]。(5)式為PSO-IWLF算法中調(diào)整策略數(shù)學(xué)表達(dá)式。
(5)
式中:ω為慣性權(quán)值;ωmax和ωmin分別為慣性權(quán)值最大值和最小值;c1和c2為時(shí)變學(xué)習(xí)因子;a和b為常數(shù);t表示當(dāng)前迭代次數(shù);T表示最大迭代次數(shù)。
在履帶車輛振動(dòng)傳感布置優(yōu)化計(jì)算中,設(shè)粒子種群規(guī)模為N,搜索空間為D,xi=(xi1,xi2,…,xiD)T可作為粒子的當(dāng)前位置,即優(yōu)化問題的一個(gè)解。粒子的搜索速度可用vi=(vi1,vi2,…,viD)T表示,粒子歷史最優(yōu)位置可用pbesti=(pi1,pi2,…,piD)T表示,種群歷史最優(yōu)位置可用gbest=(g1,g2,…,gD)T表示。其位置和速度更新公式如下:
(6)
(7)
式中:t表示當(dāng)前優(yōu)化計(jì)算過程的迭代次數(shù)。
2.2 PSO-IWLF算法性能測(cè)試及分析
選取標(biāo)準(zhǔn)PSO算法、慣性權(quán)值遞減策略PSO(記為PSO-ω)算法[14]、學(xué)習(xí)因子非線性變化策略的PSO(記為PSO-c)算法[15]以及PSO-IWLF算法4個(gè)典型測(cè)試函數(shù)進(jìn)行對(duì)比分析。
針對(duì)4個(gè)測(cè)試函數(shù)均設(shè)計(jì)4組對(duì)比測(cè)試,在各組測(cè)試中,設(shè)置粒子種群規(guī)模N為25,最大迭代次數(shù)T為500,搜索空間D為10,表1為算法參數(shù)設(shè)置。
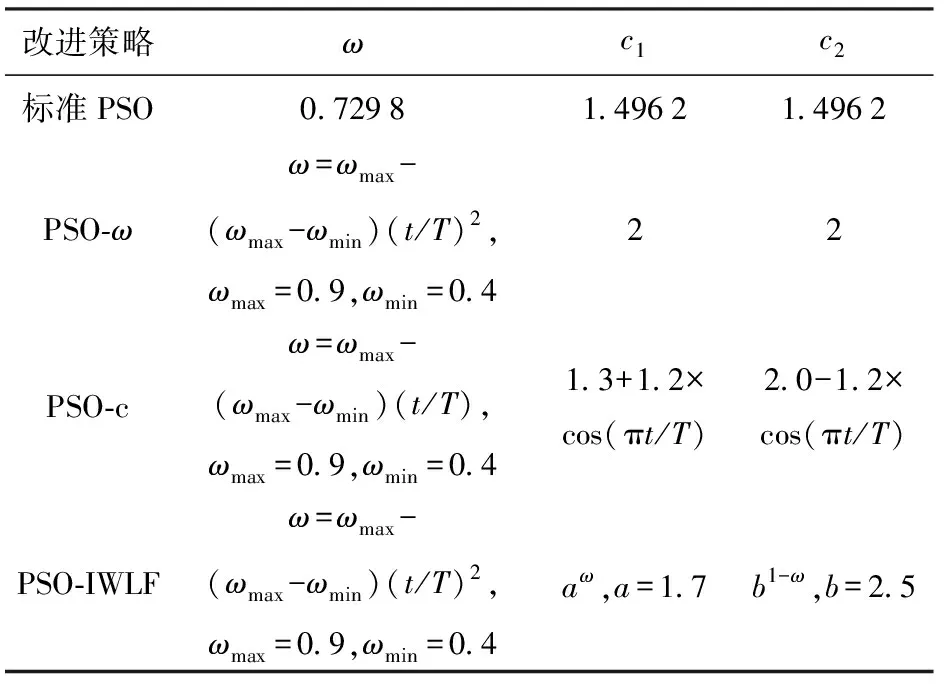
表1 算法參數(shù)設(shè)置Table 1 Algorithm parameter settings
4個(gè)典型測(cè)試函數(shù)表示形式如下:
1)Rastrigin函數(shù):

(8)
2)Sphere函數(shù):
(9)
3)Rosenbrock函數(shù):
(10)
4)Griewank函數(shù):
(11)
4種典型測(cè)試函數(shù)尋優(yōu)計(jì)算60次,得到各策略最優(yōu)值變化曲線如圖1所示,平均解、最差解以及最優(yōu)解如表2所示。
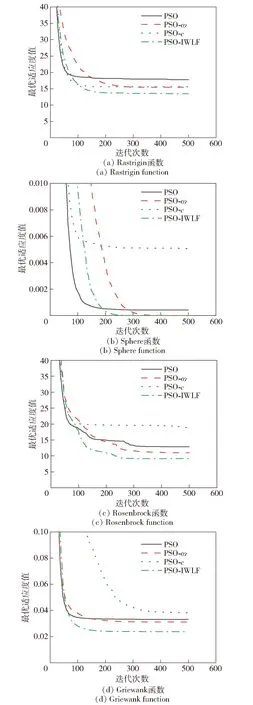
圖1 4種測(cè)試函數(shù)的平均最優(yōu)值變化曲線Fig.1 Curves of average optimal value changes of four test functions
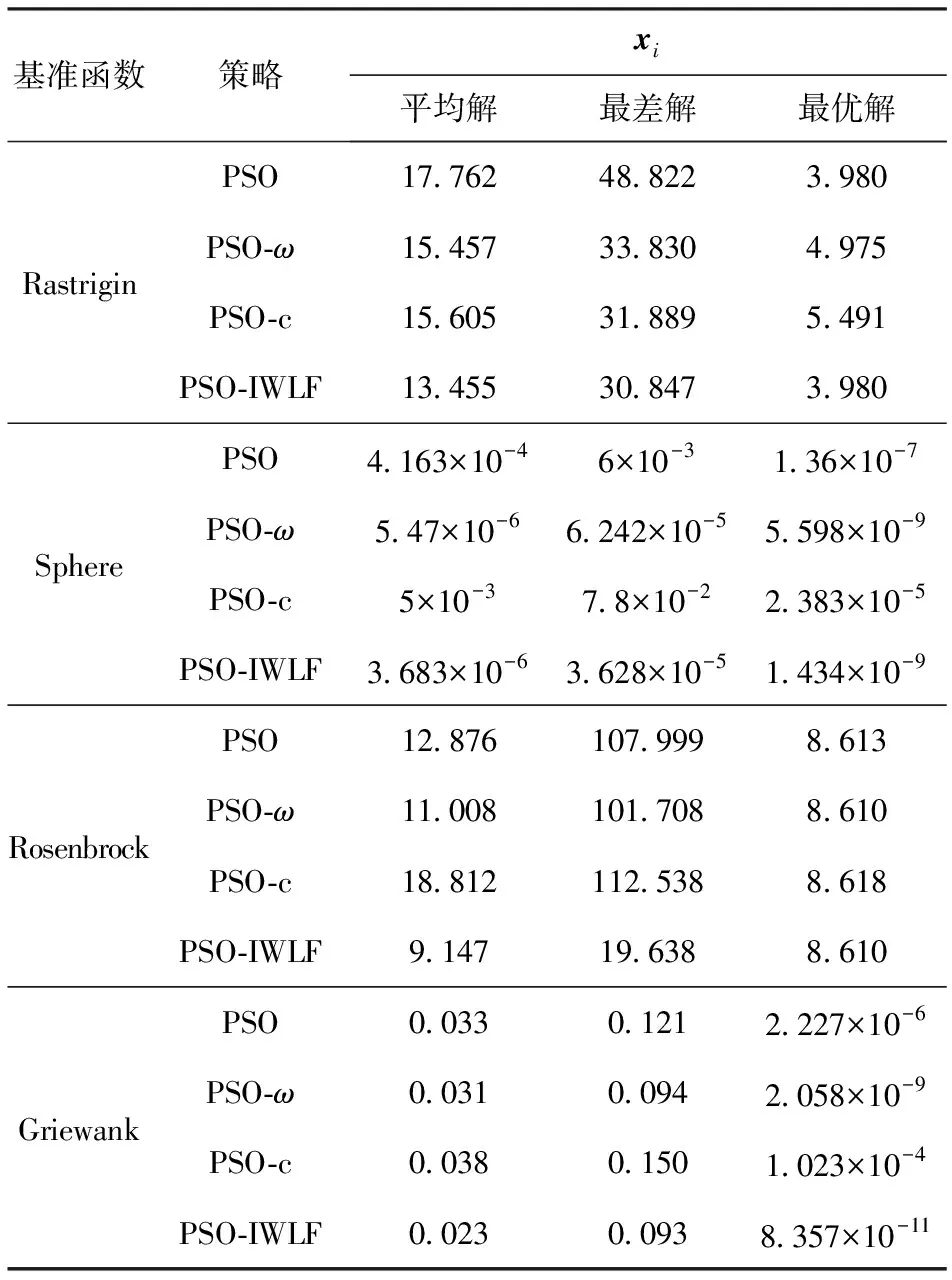
表2 4種策略測(cè)試結(jié)果比較
從表2中可知,在4種典型函數(shù)測(cè)試中,PSO-IWLF算法在尋優(yōu)精度和穩(wěn)定性上都優(yōu)于標(biāo)準(zhǔn)PSO算法、PSO-ω算法以及PSO-c算法,這表明PSO-IWLF算法有效提高了求解收斂精度、穩(wěn)定性。
3 車身振動(dòng)測(cè)試傳感布置優(yōu)化
3.1 履帶半車有限元模態(tài)分析
履帶車輛振動(dòng)測(cè)試試驗(yàn)傳感布置優(yōu)化實(shí)現(xiàn)過程如圖2所示。
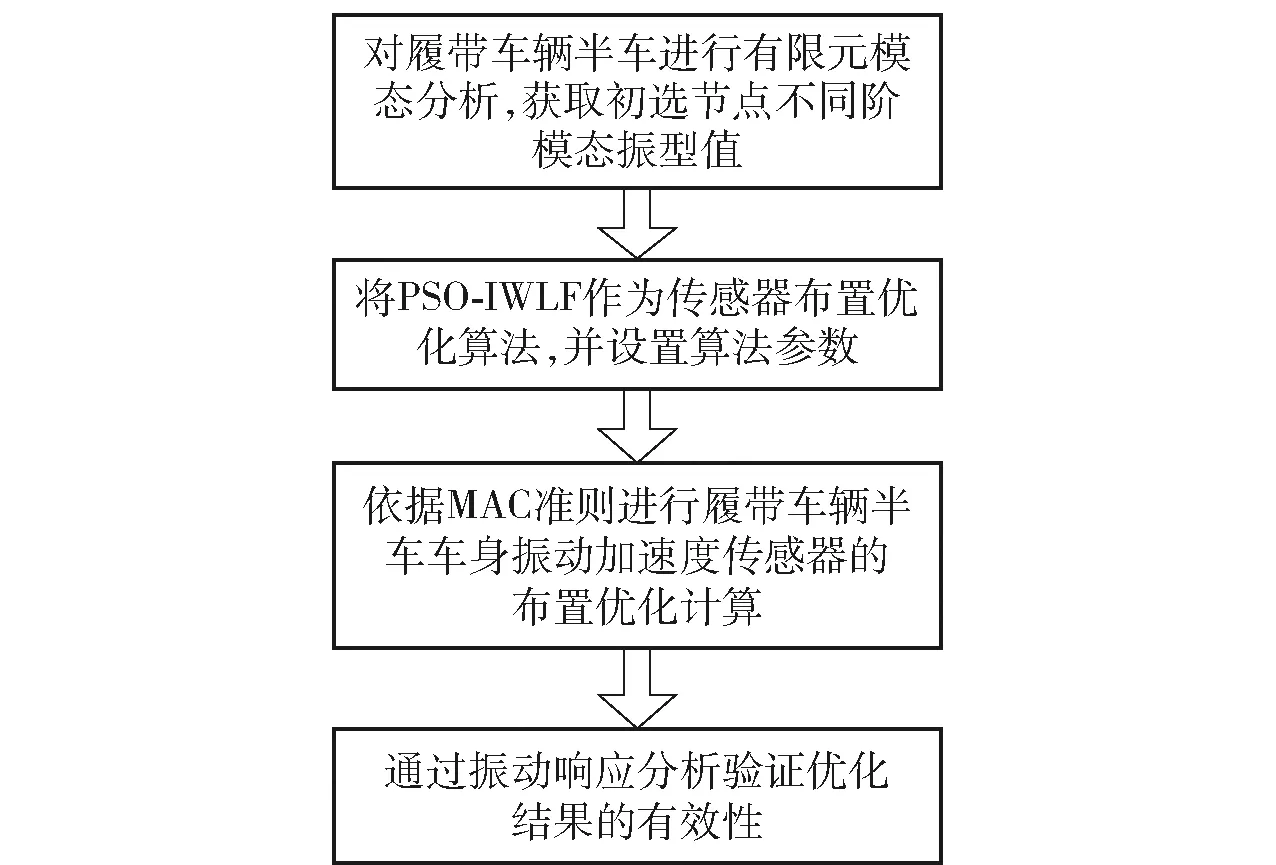
圖2 傳感布置優(yōu)化實(shí)現(xiàn)過程Fig.2 Realization process of sensor layout optimization
圖3所示為履帶車輛半車有限元模型,將履帶車輛沿z軸直線運(yùn)動(dòng)以及繞x軸旋轉(zhuǎn)運(yùn)動(dòng)自由度釋放,其余自由度約束,作為模型邊界條件并計(jì)算各階模態(tài)振型。有限元分析模態(tài)振型圖如圖4所示。
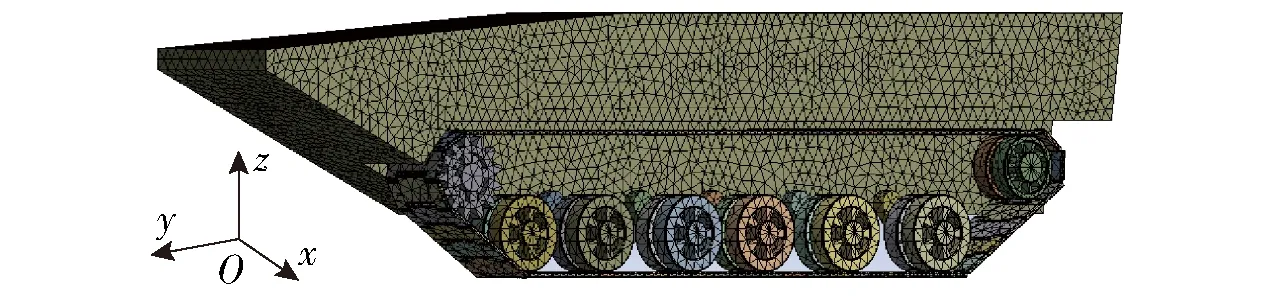
圖3 履帶車輛半車有限元模型Fig.3 Finite element model of the semi-tracked vehicle

圖4 履帶車輛半車有限元分析模態(tài)振型Fig.4 Finite element analysis of modal shape of the semi-tracked vehicle
3.2 初選點(diǎn)的選擇與編碼
車身初選測(cè)點(diǎn)如圖5所示。
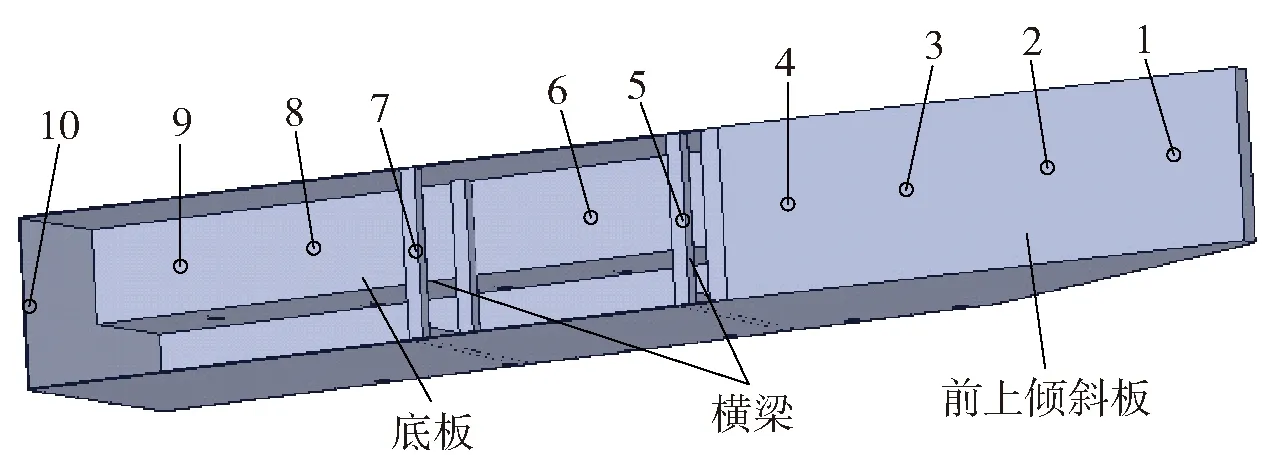
圖5 車身初選測(cè)點(diǎn)布置Fig.5 Primary test point arrangement of vehicle body
初選測(cè)點(diǎn)的節(jié)點(diǎn)編碼及節(jié)點(diǎn)各階模態(tài)頻率所對(duì)應(yīng)的模態(tài)振型計(jì)算結(jié)果如表3所示。
履帶車輛半車屬于大尺寸空間結(jié)構(gòu),其模態(tài)具有密集、低頻特性。由表3可知,節(jié)點(diǎn)30 480的7階與8階模態(tài)振型數(shù)值就較為接近。履帶車輛半車模態(tài)的這一特性對(duì)后續(xù)傳感布置優(yōu)化算法沒有直接影響,本文不予考慮。
3.3 PSO-IWLF算法實(shí)現(xiàn)
PSO-IWLF算法中相應(yīng)參數(shù)設(shè)置如下:粒子種群規(guī)模N設(shè)為10;搜索空間D根據(jù)所選初選測(cè)點(diǎn)數(shù)及振動(dòng)傳感器布置數(shù)目設(shè)置范圍為[1,10];最大迭代次數(shù)T為100;傳感器布置位置的邊界值xmax=10、xmin=1;算法參數(shù)調(diào)整策略中,取常數(shù)a=1.7,常數(shù)b=2.5。 慣性權(quán)值和學(xué)習(xí)因子變化曲線如圖6所示。
由圖6可知,隨著迭代次數(shù)的增加,時(shí)變學(xué)習(xí)因子c1呈非線性遞減,而c2呈非線性遞增。在該策略中,當(dāng)0≤迭代次數(shù)<200時(shí),ω調(diào)整較慢,因此c1、c2變化較慢,這時(shí)全局搜索能力較強(qiáng),粒子可以遍歷整個(gè)搜索空間;當(dāng)200≤迭代次數(shù)<500時(shí),ω和c1、c2均變化較快,使得各粒子向全局最優(yōu)位置快速收斂。
3.4 優(yōu)化計(jì)算結(jié)果及分析
以MACij的最大值作為傳感布置優(yōu)化的適應(yīng)度函數(shù),對(duì)傳感器布置位置和數(shù)目進(jìn)行雙重尋優(yōu)。圖7為最優(yōu)適應(yīng)度值隨傳感器布置數(shù)目的變化曲線。
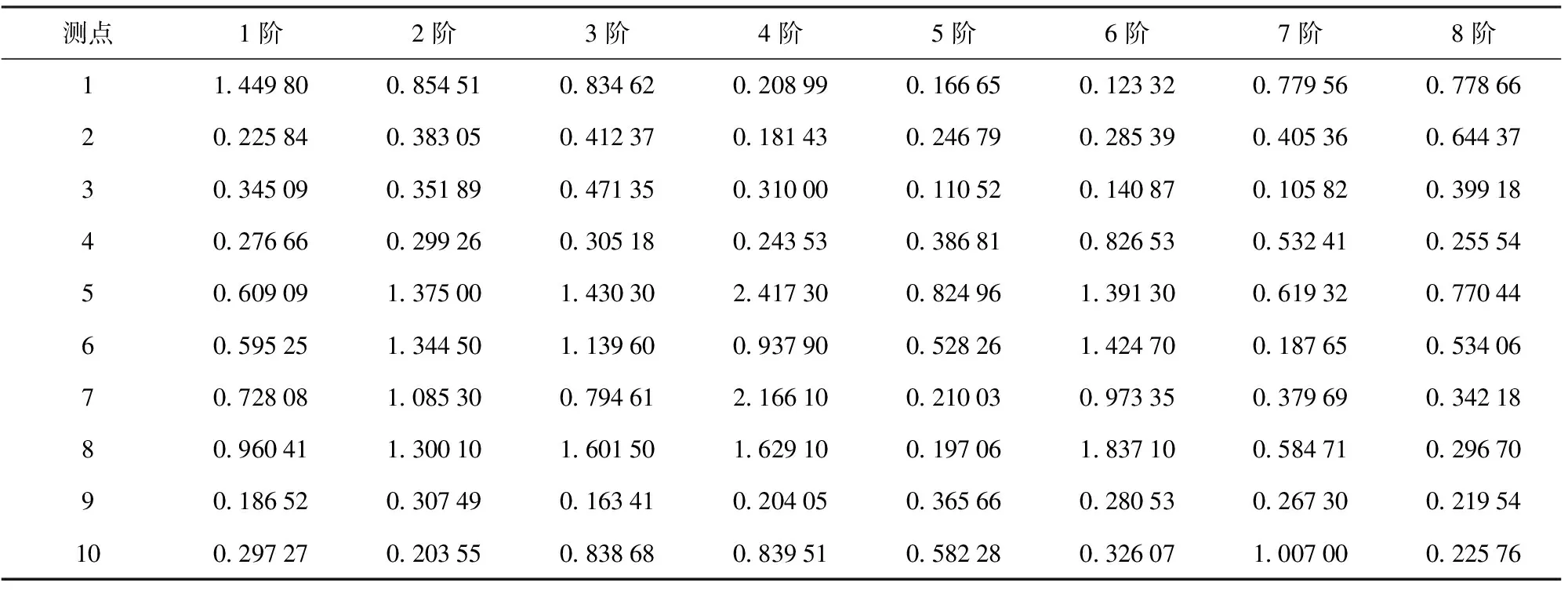
表3 初選測(cè)點(diǎn)8階模態(tài)振型Table 3 8th-order modal shape of primary selected measuring points mm
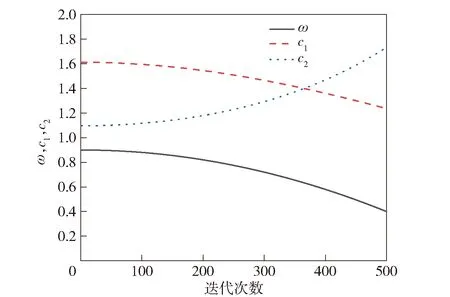
圖6 慣性權(quán)值和學(xué)習(xí)因子變化曲線Fig.6 Variation curve of inertia weight and learning factor
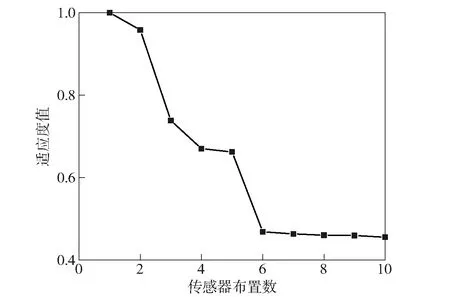
圖7 最優(yōu)適應(yīng)度值變化曲線Fig.7 Variation curve of optimum fitness value
不同傳感器布置數(shù)目所對(duì)應(yīng)的最優(yōu)適應(yīng)度和傳感器布置位置如表4所示。
從圖7和表4可知,最優(yōu)適應(yīng)度值隨傳感器布置數(shù)目增加而逐漸減少,當(dāng)布置數(shù)目為6時(shí),適應(yīng)度 值較小且后續(xù)隨著傳感器布置數(shù)目的增加,適應(yīng)度值變化幅度很小,對(duì)測(cè)點(diǎn)布置效果提升貢獻(xiàn)較小。考慮綜合成本和測(cè)試效果,布置6個(gè)傳感器,位置為[2,3,4,5,9,10]較為合理。
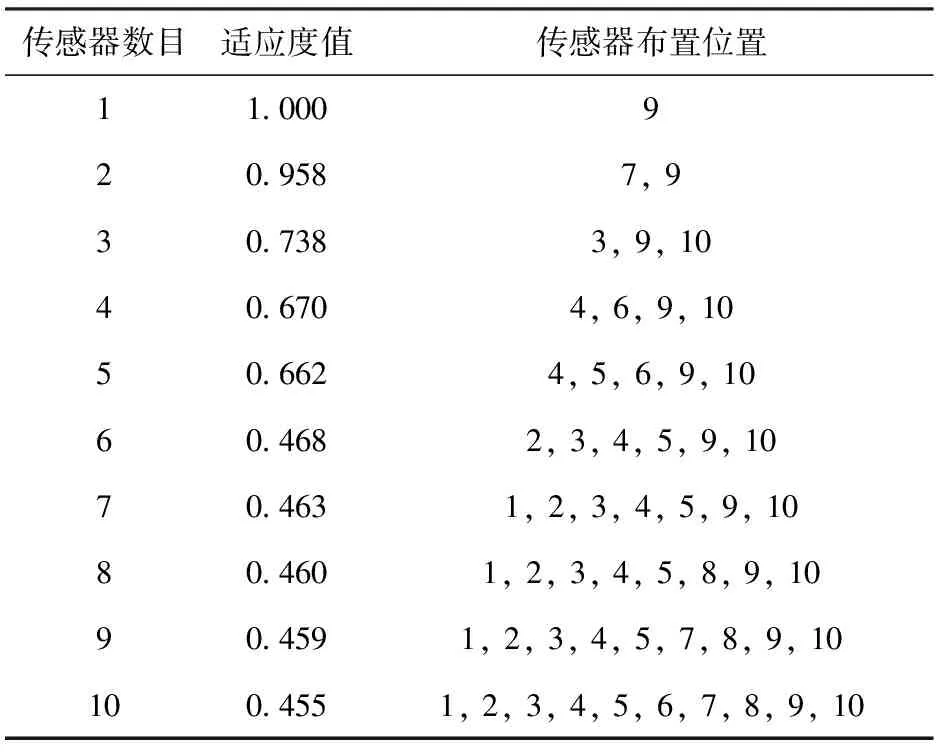
表4 傳感器布置數(shù)目和位置Table 4 Number and position of sensors
4 履帶車輛振動(dòng)測(cè)試系統(tǒng)設(shè)計(jì)
本文采用MATLAB軟件和LabView軟件混合編程方式[19-20],設(shè)計(jì)集PSO-IWLF優(yōu)化算法于一體的履帶車輛振動(dòng)測(cè)試系統(tǒng),為傳感器布點(diǎn)提供依據(jù)。履帶車輛振動(dòng)測(cè)試系統(tǒng)結(jié)構(gòu)框圖如圖8所示。
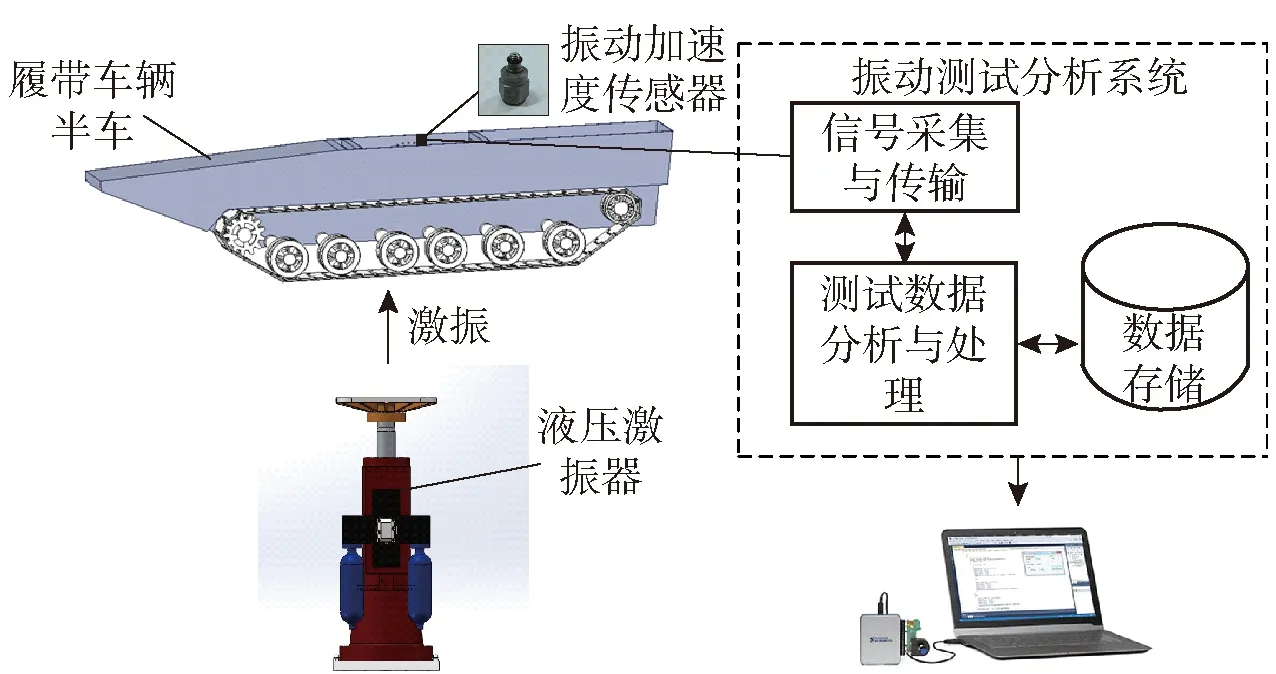
圖8 振動(dòng)測(cè)試系統(tǒng)結(jié)構(gòu)框圖Fig.8 Block diagram of vibration test system structure
履帶車輛振動(dòng)測(cè)試系統(tǒng)硬件部分包括丹麥B&K公司生產(chǎn)的4514型壓電式加速度傳感器和美國(guó)NI公司生產(chǎn)的USB-6366型數(shù)據(jù)采集卡等。表5、表6分別為加速度傳感器和數(shù)據(jù)采集卡的主要性能指標(biāo)。
履帶車輛振動(dòng)測(cè)試系統(tǒng)的功能主要分為兩部 分:第1部分為實(shí)驗(yàn)前對(duì)振動(dòng)傳感器布置優(yōu)化計(jì)算和信號(hào)采集硬件參數(shù)設(shè)置;第2部分是對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行存儲(chǔ)和讀取,并對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行分析和處理。系統(tǒng)可完成對(duì)信號(hào)的時(shí)域分析、頻域分析以及時(shí)頻分析。履帶車輛振動(dòng)測(cè)試系統(tǒng)軟件功能框圖如圖9所示。

表5 加速度傳感器主要性能指標(biāo)Table 5 Main performance indicators of acceleration sensor
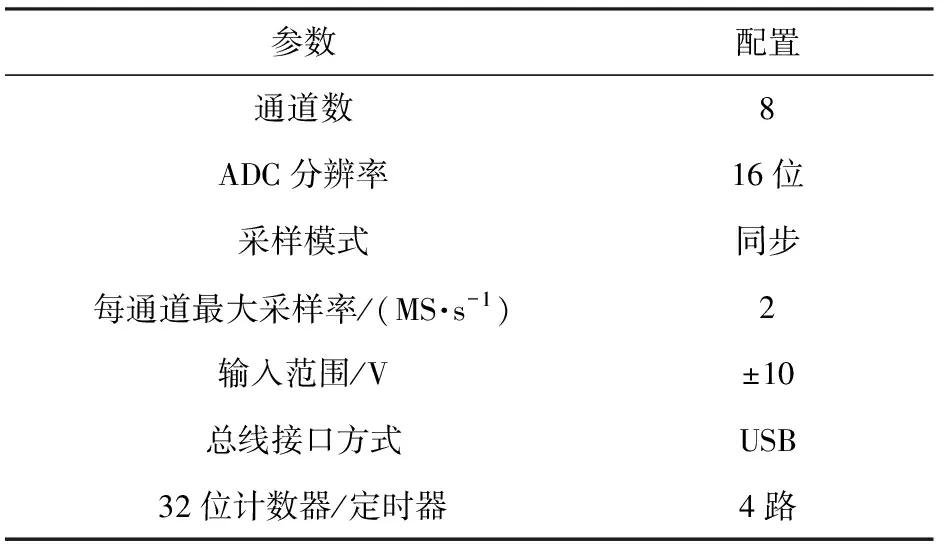
表6 數(shù)據(jù)采集卡主要參數(shù)指標(biāo)Table 6 Main parameters of data acquisition card

圖9 履帶車輛振動(dòng)測(cè)試系統(tǒng)軟件功能框圖Fig.9 Software function block diagram of tracked vehicle vibration test system
數(shù)據(jù)采集界面如圖10所示,將該測(cè)試軟件命名為L(zhǎng)abMat。
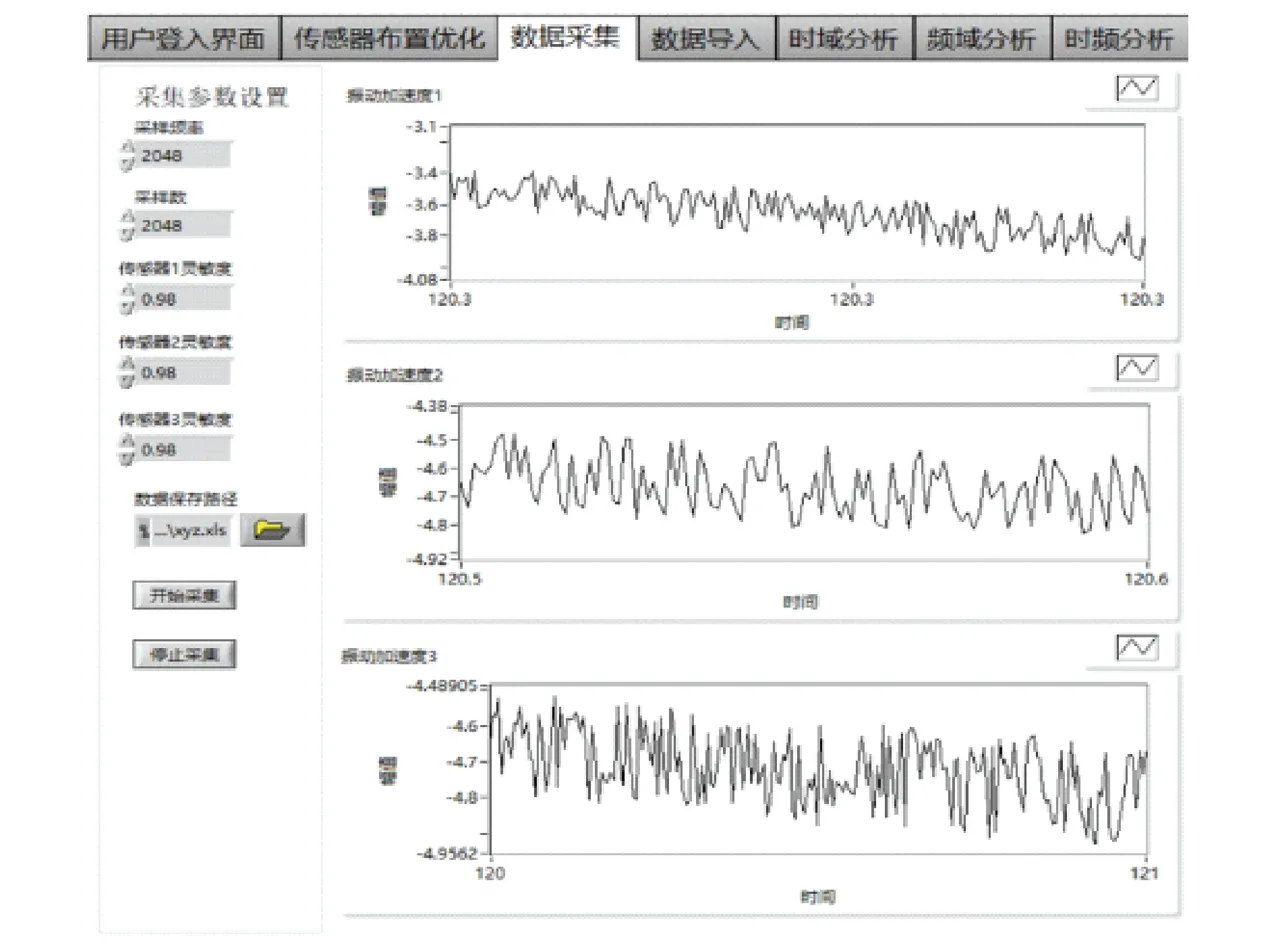
圖10 履帶車輛振動(dòng)測(cè)試軟件界面Fig.10 Tracked vehicle vibration test software interface
傳感布置優(yōu)化程序框圖如圖11所示,其中傳感布置優(yōu)化功能模塊的參數(shù)設(shè)置主要有粒子種群規(guī)模N、搜索空間D、履帶車輛振動(dòng)測(cè)試傳感布置優(yōu)化計(jì)算所設(shè)置的最大迭代次數(shù)T以及傳感布置位置的邊界值xmax、xmin等。

圖11 傳感布置優(yōu)化程序框圖Fig.11 Block diagram of sensor arrangement optimization program
5 履帶車輛振動(dòng)測(cè)試試驗(yàn)及分析
5.1 履帶車輛半車振動(dòng)試驗(yàn)臺(tái)
履帶車輛半車振動(dòng)試驗(yàn)裝置如圖12所示,測(cè)試試驗(yàn)被試對(duì)象為履帶車輛半車模型,包括履帶、負(fù)重輪、懸掛裝置和車身等部件。履帶車輛半車振動(dòng)試驗(yàn)臺(tái)激振系統(tǒng)是由6組液壓激振器組成的陣列。
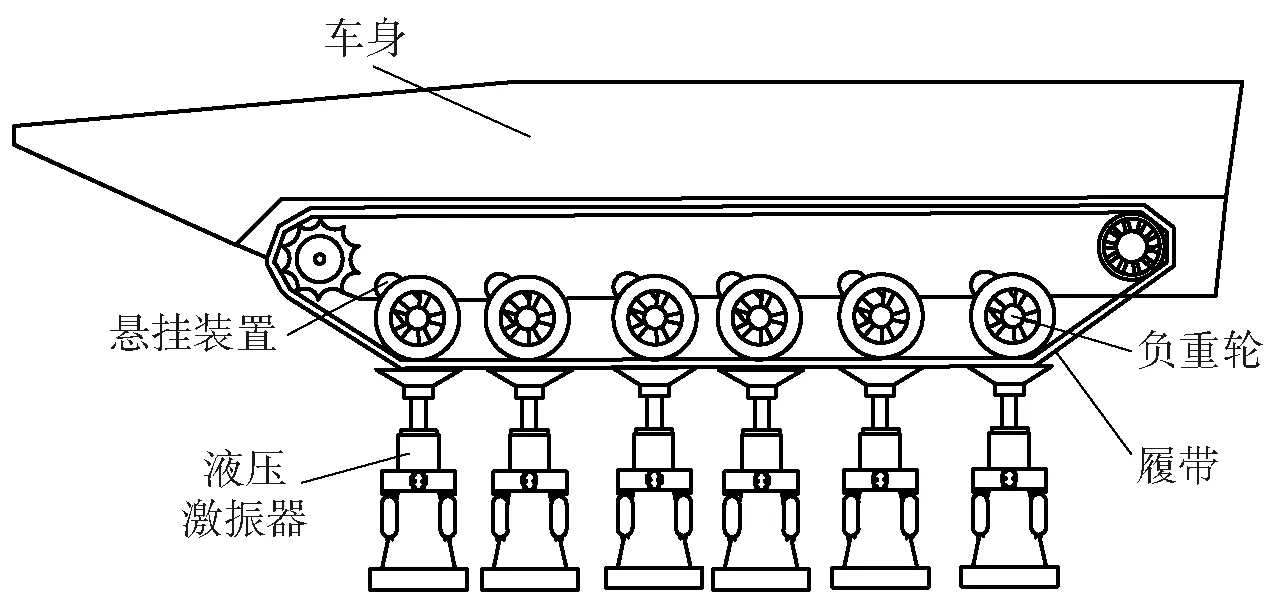
圖12 履帶車輛振動(dòng)試驗(yàn)裝置示意圖Fig.12 Schematic diagram of tracked vehicle vibration test devices
5.2 車身振動(dòng)測(cè)試傳感布置優(yōu)化試驗(yàn)驗(yàn)證
依據(jù)圖5所示的傳感器布置方案,在履帶車輛實(shí)驗(yàn)半車上布置10個(gè)4514型單軸振動(dòng)加速度傳感器,采樣頻率為8 192 Hz,現(xiàn)場(chǎng)測(cè)試系統(tǒng)如圖13(a) 所示。圖13(b)為傳感器安裝圖,其中旋轉(zhuǎn)移動(dòng)復(fù)合機(jī)構(gòu)安裝在反力墻上,用于半車車身約束,實(shí)現(xiàn)車身質(zhì)心垂直運(yùn)動(dòng)和車身繞質(zhì)心軸俯仰運(yùn)動(dòng)。
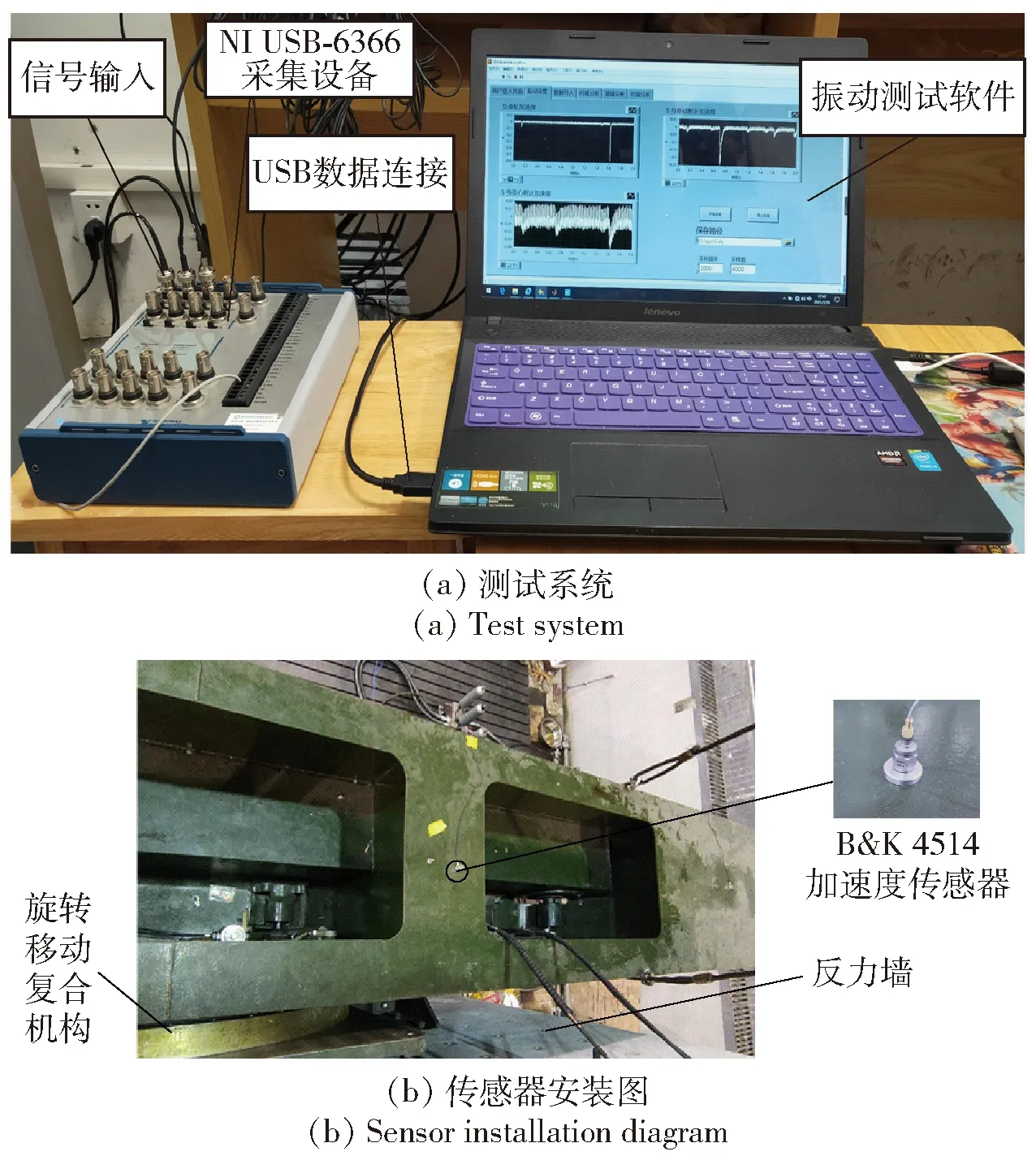
圖13 履帶車輛半車振動(dòng)測(cè)試現(xiàn)場(chǎng)Fig.13 Semi-vehicle vibration test site for tracked vehicles
在0~50 Hz隨機(jī)路譜激勵(lì)下,計(jì)算10個(gè)測(cè)點(diǎn)60 s內(nèi)加速度均方根值、峰值,結(jié)果如表7所示。
均方根值描述激勵(lì)對(duì)響應(yīng)的有效性,均方根值越大,可表征在激勵(lì)下,測(cè)點(diǎn)的響應(yīng)越大[21]。綜合兩方面響應(yīng)效果,響應(yīng)強(qiáng)烈的6個(gè)測(cè)點(diǎn)為[1,2,3,4,9,10]。與PSO-IWLF算法優(yōu)化結(jié)果[2,3,4,5,9,10]相比,測(cè)點(diǎn)1和測(cè)點(diǎn)5位置存在偏差,這主要是本算例中優(yōu)化算法目標(biāo)相對(duì)單一所致,其余5個(gè)測(cè)點(diǎn)二者完全相同。這表明了PSO-IWLF算法的有效性和可靠性。
5.3 車身振動(dòng)測(cè)試試驗(yàn)
以履帶車輛行進(jìn)速度15 km/h的戈壁路面譜、砂石路面譜、鋪面路面譜以及起伏路面譜信號(hào)作為激勵(lì),用本文開發(fā)的LabMat振動(dòng)測(cè)試軟件和商用LabGenius振動(dòng)測(cè)試軟件同時(shí)測(cè)得車體振動(dòng)加速度信號(hào)如圖14~圖17所示。
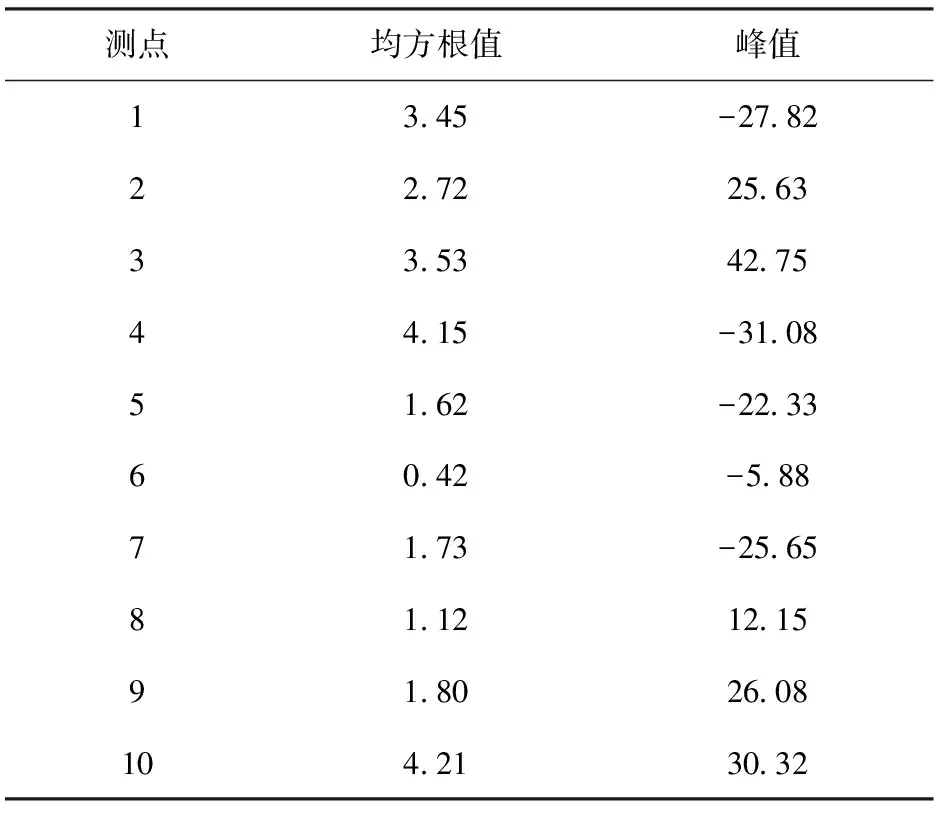
表7 加速度均方根值與峰值Table 7 Root mean square value and peak value of acceleration m/s2
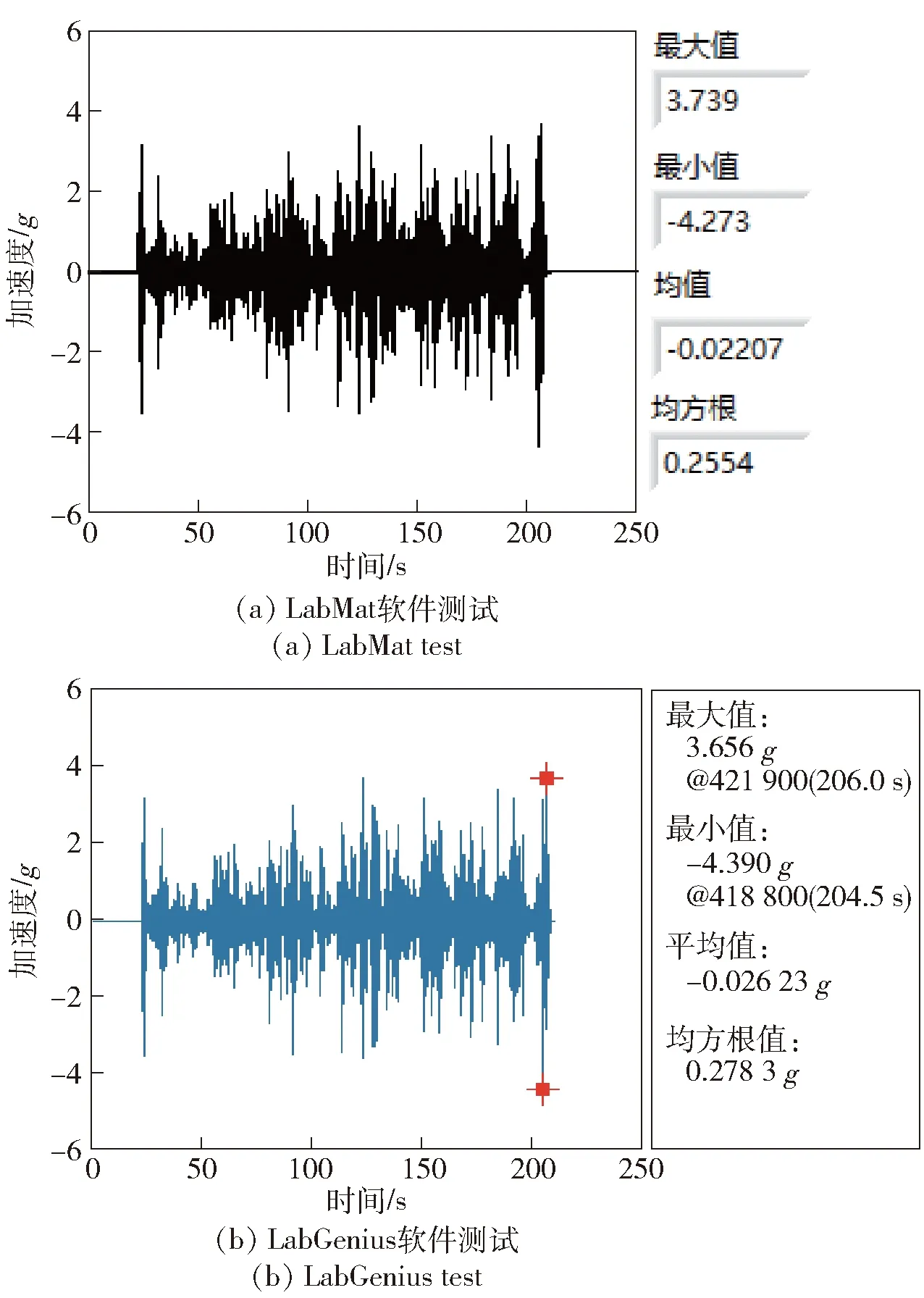
圖14 戈壁路面譜下的車身振動(dòng)加速度信號(hào)Fig.14 Vehicle body vibration acceleration signal under gobi road spectrum
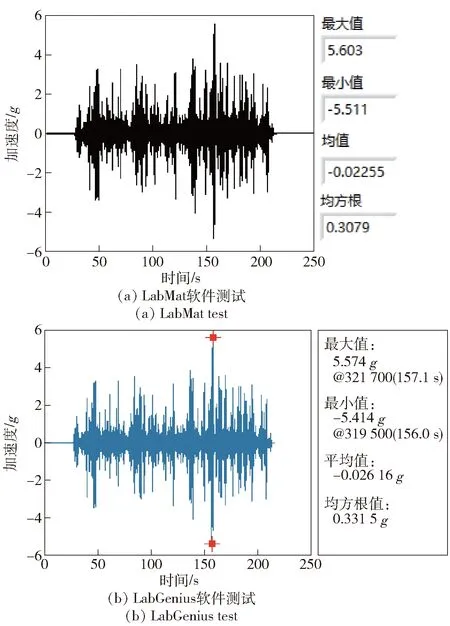
圖15 砂石路面譜下的車身振動(dòng)加速度信號(hào)Fig.15 Vehicle body vibration acceleration signal under gravel road spectrum
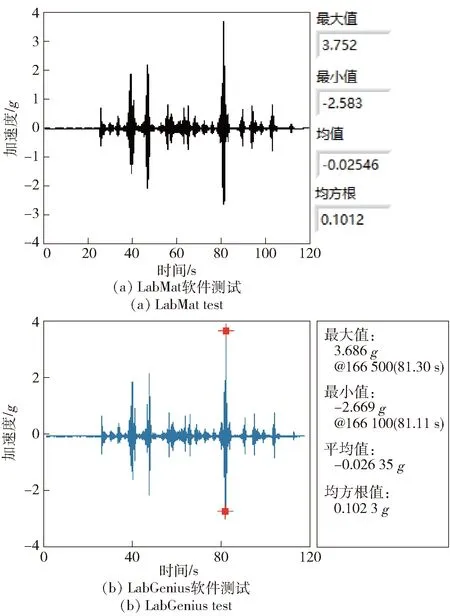
圖16 鋪面路面譜下的車身振動(dòng)加速度信號(hào)Fig.16 Vehicle body vibration acceleration signal under paved road spectrum
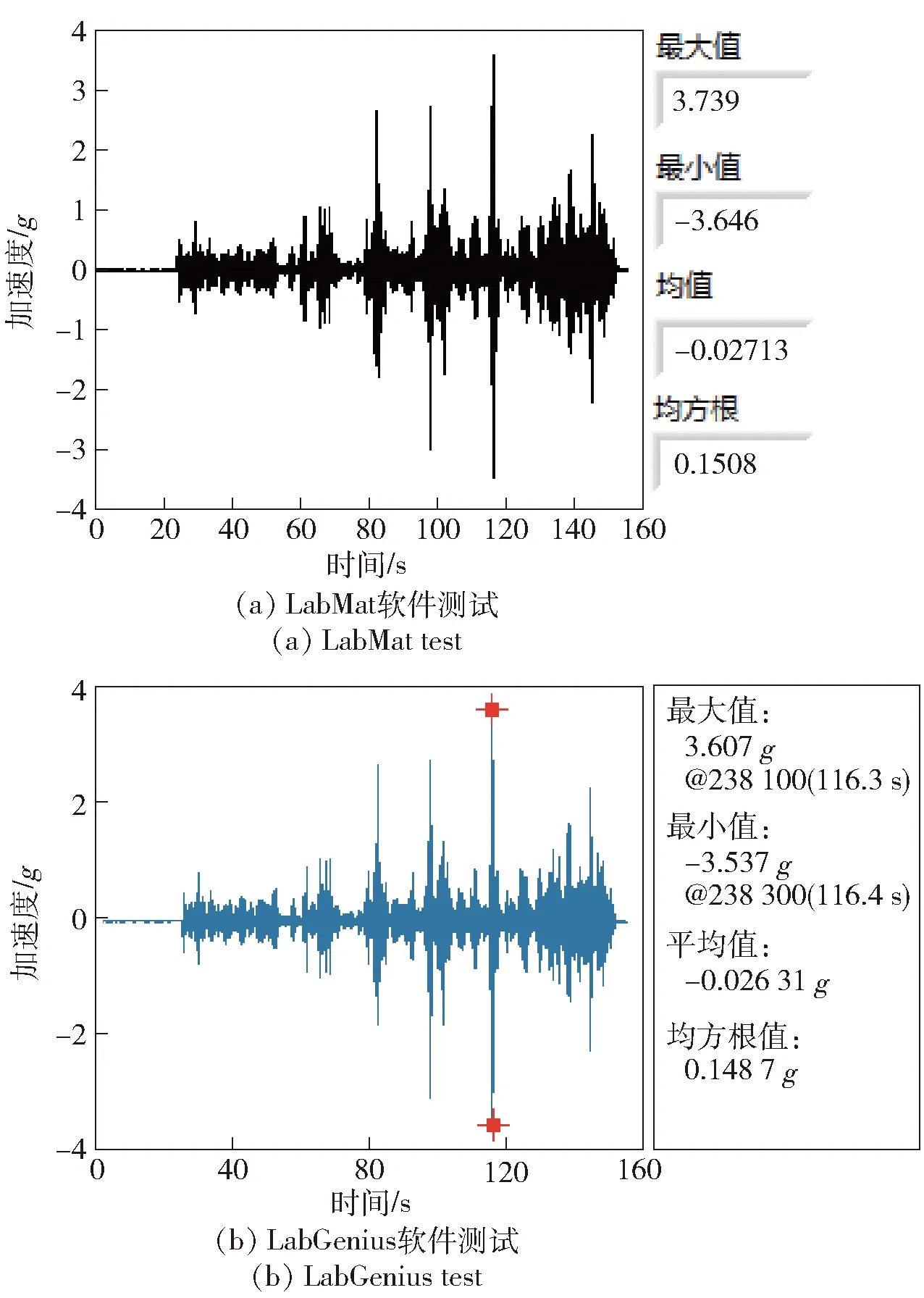
圖17 起伏路面譜下的車身振動(dòng)加速度信號(hào)Fig.17 Vehicle body vibration acceleration signal under undulating road spectrum
由圖14~圖17可知,履帶車輛車身振動(dòng)加速度最大值、最小值、均值、均方根值基本一致,誤差小于1%,這表明了LabMat測(cè)試軟件采集功能模塊的可行性。
6 結(jié)論
本文針對(duì)履帶車輛振動(dòng)測(cè)試傳感布置多維優(yōu)化問題,提出一種PSO-IWLF算法,結(jié)合履帶車輛有限元模態(tài)分析,開展振動(dòng)加速度傳感布置優(yōu)化及振動(dòng)測(cè)試系統(tǒng)研究。得出以下主要結(jié)論:
1)在4種典型函數(shù)測(cè)試中,PSO-IWLF算法相對(duì)于標(biāo)準(zhǔn)PSO算法、PSO-ω算法、PSO-c算法具有更高的求解收斂精度和穩(wěn)定性。
2)車身振動(dòng)加速度傳感器布置優(yōu)化計(jì)算,與各測(cè)點(diǎn)振動(dòng)響應(yīng)實(shí)測(cè)結(jié)果基本一致,有效解決了車輛振動(dòng)測(cè)試中傳感布置冗余問題,具有良好的實(shí)踐應(yīng)用價(jià)值。
3)嵌入PSO-IWLF優(yōu)化算法的履帶車輛振動(dòng)測(cè)試系統(tǒng)LabMat界面友好、操作方便,與商用振動(dòng)測(cè)試系統(tǒng)LabGenius相比,測(cè)試結(jié)論表明LabMat振動(dòng)測(cè)試系統(tǒng)具有良好的可行性,適應(yīng)了傳感布置優(yōu)化的發(fā)展需求,為大型結(jié)構(gòu)件振動(dòng)測(cè)試提供新的解決方案。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44
