一種高層建筑樓梯清掃機器人的結(jié)構(gòu)設(shè)計
2023-01-06 03:38:08時光升董慧芳楊佳賓王海波席盈盈王明鑫胡健
科技風(fēng) 2022年36期
時光升 董慧芳 楊佳賓 王海波 席盈盈 王明鑫 胡健
巢湖學(xué)院機械工程學(xué)院 安徽巢湖 238024
隨著時代的發(fā)展,城市里高層建筑越來越多,由于高層建筑中樓梯的數(shù)量與層數(shù)都較高,隨之就出現(xiàn)了高層建筑樓梯清潔困難這一難題。針對該難題現(xiàn)有的解決方式是雇用清潔工人來進行清潔,但高層建筑樓梯采用人工清潔時清潔效率較低且人工成本高昂,并在清潔過程中伴有一定的人身安全隱患,因此,人工清潔這種方式并不適用于對高層建筑樓梯的清潔。
機器人技術(shù)的不斷發(fā)展與進步給這個難題帶來了轉(zhuǎn)機,為解決日常生活里清潔工作效率較低和成本高昂的問題,掃地機器人這種智能清掃吸塵工具被研發(fā)了出來,該類機器人可以高效率低成本地完成各種清潔工作[1];國內(nèi)外市場上也相繼出現(xiàn)了中國科沃斯、荷蘭飛利浦、美國IRobot等眾多掃地機器人的品牌供人們選擇[2-3],盡管掃地機器人的品牌如此繁多,卻很少有針對高層建筑樓梯清掃問題的類型,主要原因在于普通掃地機器人在平時的清掃工作中難以跨越樓梯上的臺階結(jié)構(gòu)[4-5]。因此,針對普通掃地機器人難以攀爬樓梯這個難題,以及市場中缺少可以清掃高層建筑樓梯的掃地機器人這個現(xiàn)狀,本文設(shè)計出一種擁有攀爬樓梯能力的高層建筑樓梯清掃機器人很有必要。
1 高層建筑樓梯清掃機器人總體結(jié)構(gòu)簡介
本文設(shè)計的高層建筑樓梯清掃機器人,其整體結(jié)構(gòu)如圖1所示。主要分為行走機構(gòu)、攀爬機構(gòu)和清掃機構(gòu)三個部分。其中行走機構(gòu)由行走電機、轉(zhuǎn)向電機和萬向輪組成;攀爬機構(gòu)由攀爬電機、連桿和傳動軸組成,四個攀爬電機對稱分布在樓梯清掃機器人左右兩側(cè)的前端與后端;清掃機構(gòu)由吸塵裝置、清潔滾筒和清潔毛刷構(gòu)成,吸塵裝置內(nèi)置在樓梯清掃機器人的中部,由吸風(fēng)機和垃圾存儲盒組成,垃圾存儲盒內(nèi)有抽拉式存儲盒和垃圾防倒置擋板兩大結(jié)構(gòu),清潔滾筒由大型清潔滾筒和小型清潔滾筒兩種類型組成,大型清潔滾筒安置在樓梯清掃機器人的底端,小型清潔滾筒安置在樓梯清掃機器人的前端。清潔毛刷則由滑動清潔毛刷和轉(zhuǎn)動清潔毛刷兩種組成,滑動清潔毛刷位于樓梯清掃機器人前端與小型清潔滾筒配合進行樓梯側(cè)面的清潔,轉(zhuǎn)動清潔毛刷位于樓梯清掃機器人的底端,與大型清潔滾筒配合進行樓梯地面的清潔。
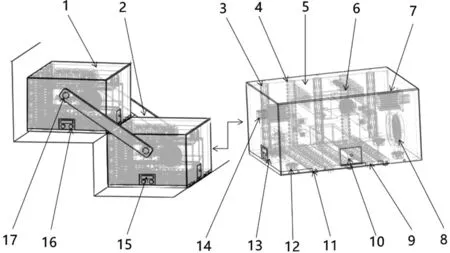
1.機器人外殼;2.連桿;3.小型清潔毛刷;4.小型清潔滾筒;5.電源裝置;6.吸風(fēng)機;7.攀爬電機;8.無線充電裝置;9.大型清潔滾筒;10.垃圾存儲裝置;11.大型清潔毛刷;12.萬向輪;13.智能控制中樞;14.傳動軸;15.顯示屏;16.控制按鈕;17.光電傳感器圖1 高層建筑樓梯清掃機器人的整體結(jié)構(gòu)
2 高層建筑樓梯清掃機器人工作原理
該樓梯清掃機器人的工作原理由路線感應(yīng)與識別、智能行進與樓梯攀爬、組合式清潔三大部分組成。該機器人的智能控制中樞先對清掃路線進行識別,通過位于光電傳感器和紅外測距傳感器對機器人進行位置檢測并反饋至控制中樞進行數(shù)據(jù)分析處理,規(guī)劃合理的行進路徑,控制中樞驅(qū)動轉(zhuǎn)向電機與行走電機實現(xiàn)機器人直線和轉(zhuǎn)向行駛。當(dāng)該機器人在到達(dá)樓梯邊緣時,智能控制中樞將前進模式切換為攀爬模式,此時位于該機器人后端的兩根傳動軸在攀爬電機的控制下進入自由轉(zhuǎn)動狀態(tài),位于前端的兩根傳動軸隨著攀爬電機的工作開始轉(zhuǎn)動,將機器人后端抬起并傳送到上一層臺階面處,完成對上一層臺階的攀爬。此后,所有攀爬電機停止工作,繼續(xù)開始對臺階面的橫向進行清潔工作。如此循環(huán),實現(xiàn)對整段樓梯的攀爬和清掃工作。
3 高層建筑樓梯清掃機器人的部分結(jié)構(gòu)設(shè)計
3.1 萬向輪部分結(jié)構(gòu)的設(shè)計
萬向輪部分結(jié)構(gòu)由驅(qū)動輪、行走電機、轉(zhuǎn)向電機、大錐齒輪、小錐齒輪、齒輪、齒圈、滾子、旋轉(zhuǎn)滾動滑槽和固定外殼組成。行走電機位于萬向輪頂端,通過齒輪機構(gòu)與驅(qū)動輪相連接,齒輪機構(gòu)由一大一小兩個錐齒輪組成,行走電機運行時帶動小錐齒輪在水平方向上轉(zhuǎn)動,小錐齒輪水平方向轉(zhuǎn)動帶動大錐齒輪進行豎直方向上的轉(zhuǎn)動,通過齒輪傳動將行走電機的水平方向轉(zhuǎn)動轉(zhuǎn)化為驅(qū)動輪的豎直方向轉(zhuǎn)動,以此實現(xiàn)驅(qū)動輪的前進與后退。轉(zhuǎn)向電機、齒輪、齒圈、滾子與旋轉(zhuǎn)滾動滑槽則構(gòu)成萬向輪的轉(zhuǎn)向系統(tǒng),轉(zhuǎn)向電機位于行走電機側(cè)端,與齒輪轉(zhuǎn)向機構(gòu)相連接,齒輪轉(zhuǎn)向機構(gòu)由齒輪與齒圈組成,當(dāng)轉(zhuǎn)向電機啟動時,與轉(zhuǎn)向電機連接的齒輪也隨之在齒圈內(nèi)轉(zhuǎn)動,同時也帶動位于萬向輪固定外殼上端的滾子開始滾動,滾子沿著萬向輪固定外殼上的旋轉(zhuǎn)滾動槽進行滾動,帶動萬向輪底部的驅(qū)動輪的方向進行改變,直至到達(dá)所需方向后轉(zhuǎn)向電機停止工作,驅(qū)動輪方向確定。該萬向輪通過轉(zhuǎn)向電機控制驅(qū)動輪方向和行走電機控制驅(qū)動輪啟停,實現(xiàn)該輪向所有方向行動的功能。如圖2所示,為萬向輪部分結(jié)構(gòu)的示意圖。
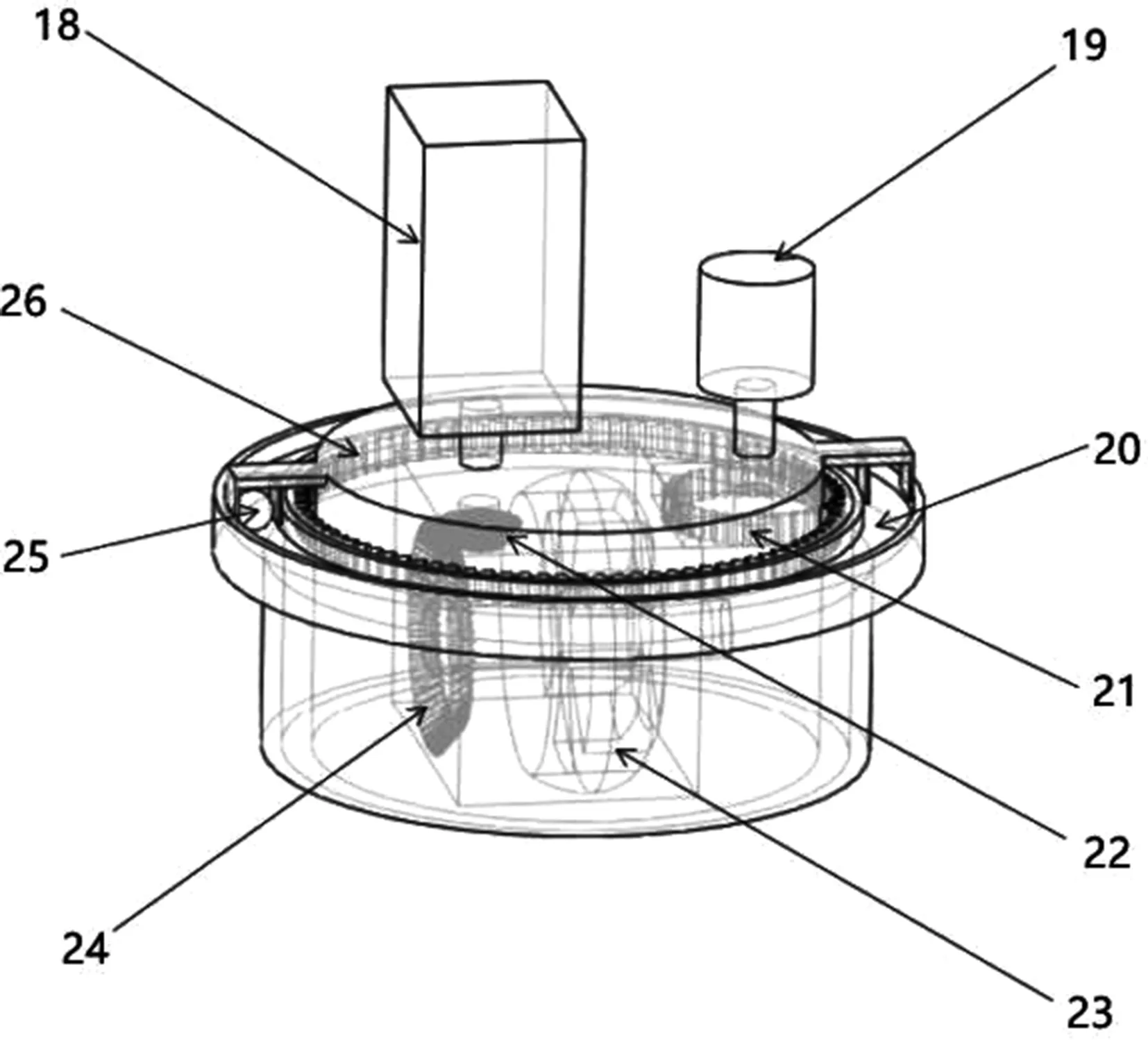
18.行走電機;19.轉(zhuǎn)向電機;20.旋轉(zhuǎn)滾動槽;21.齒輪;22.小錐齒輪;23.驅(qū)動輪;24.大錐齒輪;25.滾子;26.齒圈圖2 萬向輪部分結(jié)構(gòu)示意圖
3.2 吸塵裝置部分結(jié)構(gòu)的設(shè)計
吸塵裝置部分結(jié)構(gòu)由吸風(fēng)機、垃圾存儲盒、垃圾防倒置擋板、電源裝置和兩個吸風(fēng)口組成,吸風(fēng)機位于吸塵裝置的頂端前段,四周及頂端被吸塵裝置保護殼所包裹著,下端連接著吸塵裝置的主體,左側(cè)和右側(cè)一共兩個吸風(fēng)口,位于吸塵裝置主體的底端,兩個吸風(fēng)口的中間是垃圾存儲盒;垃圾存儲盒由可抽拉式存儲盒、紅外測距傳感器和齒輪齒條式開關(guān)組成,當(dāng)紅外測距傳感器檢測到存儲盒內(nèi)垃圾存儲滿時會反饋給智能控制中樞,智能控制中樞會反饋至顯示屏上顯示盒內(nèi)垃圾已滿,此時轉(zhuǎn)動齒輪齒條式開關(guān)可拉出可抽拉式存儲盒倒出垃圾;在兩個吸風(fēng)口的上方有兩個傾斜放置并且可以活動的垃圾防倒置擋板,這兩個垃圾防倒置擋板同時也與垃圾存儲盒的頂端開口相連接;吸塵裝置工作時,吸風(fēng)機啟動并產(chǎn)生向內(nèi)吸取的風(fēng)力,通過吸塵裝置內(nèi)部通道將吸力傳輸至垃圾防倒置擋板處,使可活動的垃圾防倒置擋板被吸力吸動向上抬起,使吸力繼續(xù)傳輸至吸風(fēng)口,將吸風(fēng)口下方的垃圾吸起,在通過垃圾防倒置擋板后落入垃圾存儲盒內(nèi);吸塵裝置停止工作時,吸風(fēng)機停止運行,吸力消失,垃圾防倒置擋板落下并回歸原位置,此時垃圾被封閉于垃圾存儲盒中且無法掉出,實現(xiàn)了對清掃過程中垃圾的存儲功能。
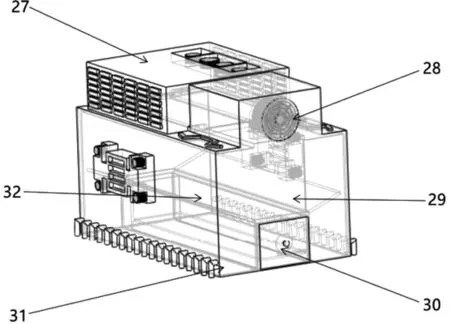
27.電源裝置;28.吸風(fēng)機;29.垃圾防倒置擋板;30.齒條式開關(guān);31.吸風(fēng)口;32.垃圾存儲盒圖3 吸塵裝置部分結(jié)構(gòu)示意圖
3.3 攀爬樓梯裝置的結(jié)構(gòu)設(shè)計
攀爬樓梯傳動裝置的主體位于高層建筑樓梯清掃機器人的左右兩個側(cè)端面。該裝置由攀爬電機、傳動軸和連桿組成,四個攀爬電機分布于機器人兩個側(cè)端的前端和后端,傳動軸位于每個攀爬電機與連桿連接的位置,連桿通過四個傳動軸上的花鍵將位于機器人前端和后端的攀爬電機兩兩連接在一起。裝置運行時,位于機器人后端的兩根傳動軸在攀爬電機的控制下進入工作狀態(tài),此時傳動軸可隨重心變化隨意轉(zhuǎn)動,位于前端的兩根傳動軸隨著攀爬電機的運行開始轉(zhuǎn)動,由于傳動軸上花鍵的特殊結(jié)構(gòu),傳動軸同時會帶動連桿一起進行旋轉(zhuǎn),此時機器人后端被抬起并隨著傳動軸轉(zhuǎn)動而從后方向前方移動位置,直至后端被移至下一階樓梯上穩(wěn)定之后,所有攀爬電機停止工作,傳動軸不再轉(zhuǎn)動。此時實現(xiàn)對上一階樓梯的攀爬,循環(huán)往復(fù)該流程即可實現(xiàn)對整段樓梯的攀爬。
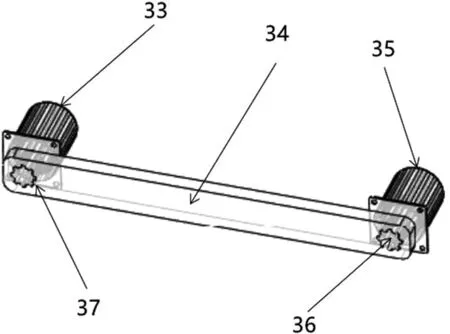
33.前端攀爬電機;34.連桿;35.后端攀爬電機;36.傳動軸;37.花鍵圖4 攀爬樓梯裝置部分結(jié)構(gòu)示意圖
結(jié)語
本文設(shè)計了一種高層建筑樓梯清掃智能機器人的結(jié)構(gòu),其結(jié)構(gòu)簡單、操作方便、工作高效,智能化、自動化程度較高;通過攀爬電機、傳動軸與連桿組成的攀爬機構(gòu)實現(xiàn)對樓梯的攀爬,配合行走電機、轉(zhuǎn)向電機與萬向輪組成的行走機構(gòu)和吸塵裝置、清潔滾筒、清潔毛刷組成的清掃機構(gòu),協(xié)同實現(xiàn)了對高層建筑樓梯的攀爬與清掃,提高了高層建筑樓梯清掃效率的同時,減少了高層建筑樓梯清掃對人力資源的依賴,填補了掃地機器人市場中存在的空缺。