旋轉(zhuǎn)不變的數(shù)據(jù)驅(qū)動稀薄流非線性本構(gòu)計(jì)算方法
2023-01-10 04:20:00蔣勵劍趙文文陳偉芳堯少波
航空學(xué)報(bào) 2022年12期
蔣勵劍,趙文文,陳偉芳,堯少波
浙江大學(xué) 航空航天學(xué)院,杭州 310027
錢學(xué)森[1]根據(jù)來流氣體稀薄程度將氣體流域分為連續(xù)流域、滑移流域、過渡流域和自由分子流域,除連續(xù)流域外的其他3大流域又被合稱為稀薄非平衡流域。在連續(xù)流域,氣體滿足連續(xù)介質(zhì)假設(shè),因而在宏觀連續(xù)介質(zhì)流體力學(xué)的基礎(chǔ)下,形成了以Navier-Stokes(N-S)方程為控制方程的連續(xù)流數(shù)值模擬計(jì)算方法,結(jié)合物面滑移邊界條件,可將N-S方程的適用領(lǐng)域擴(kuò)展到滑移流域。隨著氣體稀薄程度的增加,連續(xù)介質(zhì)假設(shè)在過渡流域和自由分子流域失效。當(dāng)特征尺度逼近分子平均自由程時(shí),在微觀氣體動理論的基礎(chǔ)上形成了直接模擬蒙特卡洛(Direct Simulation of Monto Carlo, DSMC)方法[2],以微觀粒子的運(yùn)動和碰撞直接模擬宏觀流動。DSMC能夠在稀薄流域給出與真實(shí)飛行試驗(yàn)較為吻合的流場與氣動數(shù)據(jù),然而其統(tǒng)計(jì)特點(diǎn)導(dǎo)致計(jì)算需要消耗大量的內(nèi)存和機(jī)時(shí),限制了該方法在工程領(lǐng)域近連續(xù)和多尺度流動中的應(yīng)用。以Boltzmann方程為控制方程的統(tǒng)一氣體動理論格式(Unified Gas-Kinetic Scheme, UGKS)方法是一套介于宏觀和微觀之間的介觀方法[3]。然而UGKS在求解過程中依賴速度分布函數(shù)在速度空間的離散,同樣給存儲和計(jì)算負(fù)荷帶來了很大的壓力。針對稀薄非平衡流域計(jì)算效率與計(jì)算精度的沖突,構(gòu)建同時(shí)具備高效率與高精度的數(shù)值方法在工程領(lǐng)域顯得尤為重要。
近年來,隨著大數(shù)據(jù)科學(xué)的興起、大規(guī)模并行計(jì)算及GPU設(shè)備的普及,機(jī)器學(xué)習(xí)方法在計(jì)算機(jī)視覺、自然語言處理等各個領(lǐng)域迅速得到應(yīng)用與發(fā)展。人工智能也被認(rèn)為是21世紀(jì)3大尖端技術(shù)(基因工程、納米科學(xué)、人工智能)之一[4]。在流體力學(xué)領(lǐng)域,機(jī)器學(xué)習(xí)也表現(xiàn)出巨大的潛力。在流動控制領(lǐng)域,誕生了面向流動控制基于機(jī)器學(xué)習(xí)的系統(tǒng)辨識與降階模型、基于遺傳規(guī)劃的主動流動控制、基于人工神經(jīng)網(wǎng)絡(luò)與深度強(qiáng)化學(xué)習(xí)的主動流動控制等方法[5]。在改善RANS模型方面,機(jī)器學(xué)習(xí)方法的應(yīng)用思路可以分為兩類[6]:一是采用增加源項(xiàng)的方式改變模型的控制方程形式,如Tracey等[7]利用機(jī)器學(xué)習(xí)重建RANS模型方程的源項(xiàng),提出了開發(fā)湍流模型函數(shù)形式的新方法;二是構(gòu)造偏差函數(shù),再與原RANS結(jié)果相加作為雷諾應(yīng)力預(yù)示結(jié)果,如Wang等[8]用隨機(jī)森林方法學(xué)習(xí)RANS模型偏差量,提高了RANS模型的準(zhǔn)確性;Xiao等[9]針對RANS和DNS結(jié)果的差異,利用機(jī)器學(xué)習(xí)方法并引進(jìn)了物理約束,對RANS結(jié)果進(jìn)行了修正。另一方面,也有學(xué)者選擇不再修正現(xiàn)有模型,而是直接尋找流場物理量與湍流之間的關(guān)系,如Zhu等[10]構(gòu)建黑箱模型,采用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò),建立了基于機(jī)器學(xué)習(xí)的高維數(shù)據(jù)驅(qū)動網(wǎng)絡(luò)模型;Ling等[11]利用張量不變基將伽利略不變性嵌入到預(yù)測的各向異性張量中,證明滿足伽利略不變性的神經(jīng)網(wǎng)絡(luò)在部分條件下具有更好的預(yù)測精度。而在稀薄流域,李廷偉等[12]采用極端隨機(jī)樹模型對非線性本構(gòu)關(guān)系的復(fù)雜高維非線性回歸問題進(jìn)行了建模,對基于數(shù)據(jù)驅(qū)動非線性本構(gòu)方程數(shù)值計(jì)算方法(DNCR)進(jìn)行了初步驗(yàn)證。Zhang等[13]基于DSMC數(shù)據(jù)利用稀疏回歸方法推導(dǎo)宏觀控制方程,證明數(shù)據(jù)驅(qū)動與分子模擬結(jié)合具有廣闊的發(fā)展前景。由于研究剛剛起步,這些適用于稀薄非平衡流動問題的計(jì)算方法目前僅應(yīng)用于簡單的流動問題,尚未擴(kuò)展到較全面和復(fù)雜的多尺度稀薄非平衡流動。
在各種機(jī)器學(xué)習(xí)模型中,決策樹是一種基本的分類與回歸方法[14]。決策樹算法的概念最初可以追溯到1966年提出的CLS學(xué)習(xí)系統(tǒng),而可用于回歸預(yù)測的CART算法在1984年由Breiman等提出。2001年,Breiman[15]繼續(xù)在此基礎(chǔ)上提出隨機(jī)森林算法,其本質(zhì)相當(dāng)于分類樹的組合,通過幾個模型降低泛化誤差,針對數(shù)值屬性的特征,將不同特征的樣本分配到對應(yīng)的分支。由于隨機(jī)森林的計(jì)算效率、精度等綜合性能較好,在如環(huán)境保護(hù)[16]、推薦系統(tǒng)[17]、道路交通情況預(yù)測[18]、結(jié)構(gòu)裂紋監(jiān)測[19]、動力裝置可靠性分析[20]等許多領(lǐng)域都有應(yīng)用。對比隨機(jī)森林,極端隨機(jī)樹[21]則在隨機(jī)提取樣本的基礎(chǔ)上隨機(jī)提取特征,因而隨機(jī)性與抗干擾能力更強(qiáng)。
綜上所述,現(xiàn)有DNCR方法采用了極端隨機(jī)樹方法,直接提取流場物理量與物理量梯度作為特征值與標(biāo)記值,然而這些物理量大部分天然不具備伽利略不變性,使得所訓(xùn)練模型的預(yù)測范圍嚴(yán)重依賴于訓(xùn)練集坐標(biāo)系的固有方向,限制了模型的泛化性能。針對上述問題,本文在原始DNCR方法的基礎(chǔ)上提出了運(yùn)用旋轉(zhuǎn)不變量進(jìn)行訓(xùn)練與學(xué)習(xí)的改進(jìn)DNCR方法。改進(jìn)DNCR方法仍以N-S方程與UGKS方法作為理論基礎(chǔ)與數(shù)據(jù)來源,采用旋轉(zhuǎn)不變量代替特征值與標(biāo)記值中包含空間坐標(biāo)方向信息的流場物理量,使得所得訓(xùn)練模型能夠適用于任意旋轉(zhuǎn)后的坐標(biāo)系框架,增強(qiáng)了模型的泛化能力和遷移學(xué)習(xí)能力。為了驗(yàn)證改進(jìn)方法的有效性,本文以不同稀薄來流條件和不同幾何模型下的頂蓋方腔驅(qū)動流和二維圓柱/橢圓柱繞流為例,開展了特征參數(shù)選取、模型參數(shù)調(diào)優(yōu)、泛化性能評估等工作,并評估改進(jìn)方法與原有DNCR方法的計(jì)算精度提升情況。計(jì)算結(jié)果表明:采用旋轉(zhuǎn)不變量進(jìn)行訓(xùn)練和學(xué)習(xí)后,改進(jìn)DNCR方法在模型的泛化性能和流場物理量預(yù)示精度上明顯優(yōu)于采用極端隨機(jī)樹直接學(xué)習(xí)流場物理量的原始DNCR方法。
1 DNCR計(jì)算方法與旋轉(zhuǎn)不變性修正
數(shù)據(jù)驅(qū)動非線性本構(gòu)方程數(shù)值計(jì)算方法的基本原理是將N-S方程和UGKS方法的計(jì)算結(jié)果作為流場樣本訓(xùn)練數(shù)據(jù),采用機(jī)器學(xué)習(xí)方法構(gòu)建熱流/應(yīng)力項(xiàng)與流場特征參數(shù)的高維復(fù)雜非線性回歸關(guān)系模型,對N-S方程本構(gòu)關(guān)系進(jìn)行非線性修正,最后通過求解耦合了數(shù)據(jù)驅(qū)動非線性回歸關(guān)系模型的宏觀守恒方程得到待預(yù)測狀態(tài)的稀薄非平衡流數(shù)值解[12]。三維N-S流動控制方程在笛卡爾直角坐標(biāo)系下的具體表達(dá)式為
(1)
式中:Q為守恒量;E、F、G為無黏通量;Ev、Fv、Gv為黏性通量。其黏性應(yīng)力張量和熱流項(xiàng)的表達(dá)式為
(2)
隨著氣體稀薄程度變高,努森數(shù)增大,基于連續(xù)介質(zhì)假設(shè)的N-S流動控制方程逐漸失效。在稀薄非平衡流域,流動問題主要通過Boltzmann方程來描述,該方程運(yùn)用概率速度分布函數(shù)來描述稀薄氣體分子的運(yùn)動狀態(tài),是氣體動理學(xué)的基礎(chǔ)控制方程[22]。UGKS采用由BGK[23]簡化的Boltzmann模型方程計(jì)算氣體分子的遷移和碰撞過程:
e-(t-t′)/τdt′+e-t/τf(x-ut,u,0)
(3)
式中:分布函數(shù)f為坐標(biāo)x、分子速度u和時(shí)間t的函數(shù),用來表示t時(shí)刻以速度u到達(dá)坐標(biāo)x的分子數(shù)密度;g為平衡態(tài)分布函數(shù),依賴于宏觀物理量;τ為松弛時(shí)間,量級和分子平均碰撞時(shí)間相同。然而,UGKS將分子運(yùn)動和碰撞過程耦合在一起的同時(shí),也使用了額外的速度離散空間,使得在面對復(fù)雜高速流動問題時(shí)收斂較慢,計(jì)算效率較低。

以二維問題為例,對熱流/應(yīng)力項(xiàng)進(jìn)行如下非線性修正:
(4)
將式(4)代入質(zhì)量、動量與能量守恒方程中進(jìn)行迭代計(jì)算至收斂,最終獲得DNCR方法的流場預(yù)示結(jié)果。由于非線性修正式(4)的約束,最終收斂得到的流場解將趨近于訓(xùn)練模型給出的應(yīng)力、熱流與流場梯度。
在原始DNCR方法中,由于特征值和標(biāo)記值均直接選取流場的物理量與物理量梯度,不具備天然的伽利略不變性。在面對不同的待預(yù)測狀態(tài)與幾何模型時(shí),只有當(dāng)待預(yù)測狀態(tài)的坐標(biāo)系方向與訓(xùn)練集坐標(biāo)系方向相同時(shí),才能得到較為理想的預(yù)測結(jié)果。而當(dāng)坐標(biāo)系發(fā)生諸如旋轉(zhuǎn)變化時(shí),預(yù)測結(jié)果可能無法收斂,導(dǎo)致訓(xùn)練模型適用范圍受限,泛化性能亟待提升。
為了使訓(xùn)練得到的機(jī)器學(xué)習(xí)模型能夠在任意旋轉(zhuǎn)坐標(biāo)系下適用,提高模型的泛化性能,拓展模型的適用范圍。本文對原方法中的特征值和標(biāo)記值進(jìn)行了優(yōu)化與旋轉(zhuǎn)不變性處理,其中DNCR方法的計(jì)算流程如圖1所示。

圖1 DNCR方法計(jì)算流程圖

(5)

由于應(yīng)力Δτij為對稱張量,可以將其表示為Δτij=VΛVT形式,其中Λ為特征值λ1、λ2、λ3構(gòu)成的對角陣,代表應(yīng)力Δτij的主應(yīng)力方向,不隨坐標(biāo)變換而變化,由此得到3個標(biāo)記值λ1、λ2、λ3;V為特征值對應(yīng)的特征向量v1、v2、v3構(gòu)成的矩陣,特征值對應(yīng)的特征向量兩兩正交,并且在此問題下表現(xiàn)為旋轉(zhuǎn)矩陣,即|V|=-1,V記錄了當(dāng)前坐標(biāo)系的方位信息。由于矩陣無法直接作為標(biāo)記值參與訓(xùn)練和預(yù)測,將旋轉(zhuǎn)矩陣變換為四元數(shù)(具體變換過程見附錄A),因而得到4個標(biāo)記值q0、q1、q2、q3,代表應(yīng)力Δτij的坐標(biāo)方向信息。速度梯度的合成量采取與應(yīng)力同樣的處理方式。


在預(yù)測過程中,對N-S計(jì)算收斂得到的KnP、Knρ、udp/dx等23個旋轉(zhuǎn)不變量作為機(jī)器學(xué)習(xí)模型輸入;將UGKS與N-S的應(yīng)力、熱流、速度梯度、溫度梯度的張量特征值差量λi和由N-S特征向量變換為UGKS特征向量的旋轉(zhuǎn)矩陣Vq(Vq由四元數(shù)qj表示,具體變換過程詳見附錄A)作為模型輸出。以應(yīng)力張量為例,對DNCR續(xù)算所需的Δτij,有
(6)


2 機(jī)器學(xué)習(xí)模型選擇與參數(shù)調(diào)優(yōu)
改進(jìn)DNCR方法使用極端隨機(jī)樹作為學(xué)習(xí)模型,極端隨機(jī)樹本質(zhì)上是多個決策樹的集合,決策樹是一種基本的分類與回歸方法。決策樹的生成就是遞歸地構(gòu)建二叉決策樹的過程,回歸樹采用平方誤差最小化準(zhǔn)則。每一棵回歸樹對應(yīng)著輸入空間(即特征空間)的一個劃分以及在劃分的單元上的輸出值。假設(shè)已將輸入空間劃分為M個單元,并且在每個單元 上有一個固定的輸出值,于是回歸樹模型可表示為[14]
(7)
在輸入空間的劃分確定后,一般采用平方誤差來表示回歸樹對訓(xùn)練集的預(yù)測誤差,用使平方誤差最小的準(zhǔn)則來求解每個單元的最優(yōu)輸出。通常使用的最小二乘回歸樹算法,在訓(xùn)練數(shù)據(jù)集的輸入空間中,遞歸的將每個區(qū)域分為兩個子區(qū)域并決定其輸出值,來構(gòu)建二叉決策樹:
1) 選擇最優(yōu)切分變量j與切分點(diǎn)s,求解
(8)
遍歷變量,對固定的切分變量 掃描切分點(diǎn),選擇使式(8)達(dá)到最小值的對。
2) 用選定的劃分區(qū)域并決定相應(yīng)的輸出值:
(9)
(10)
3) 繼續(xù)對兩個字區(qū)域調(diào)用步驟1)和步驟2),直至滿足停止條件。
4) 將輸入空間劃分為M個區(qū)域R1,R2,…,RM,生成決策樹:
(11)
極端隨機(jī)樹作為二叉決策樹的一種集成算法,對所有訓(xùn)練樣本直接隨機(jī)選擇分叉特征得到結(jié)果,實(shí)現(xiàn)簡單,不容易產(chǎn)生過擬合,易找到對結(jié)果影響較大的特征,并且可并行化、速度快。
本文對基學(xué)習(xí)器數(shù)目以及最大特征數(shù)進(jìn)行調(diào)優(yōu),通過可決系數(shù)的大小對兩個超參數(shù)進(jìn)行尋優(yōu),可決系數(shù)公式為
(12)


圖2 基學(xué)習(xí)器數(shù)目調(diào)優(yōu)
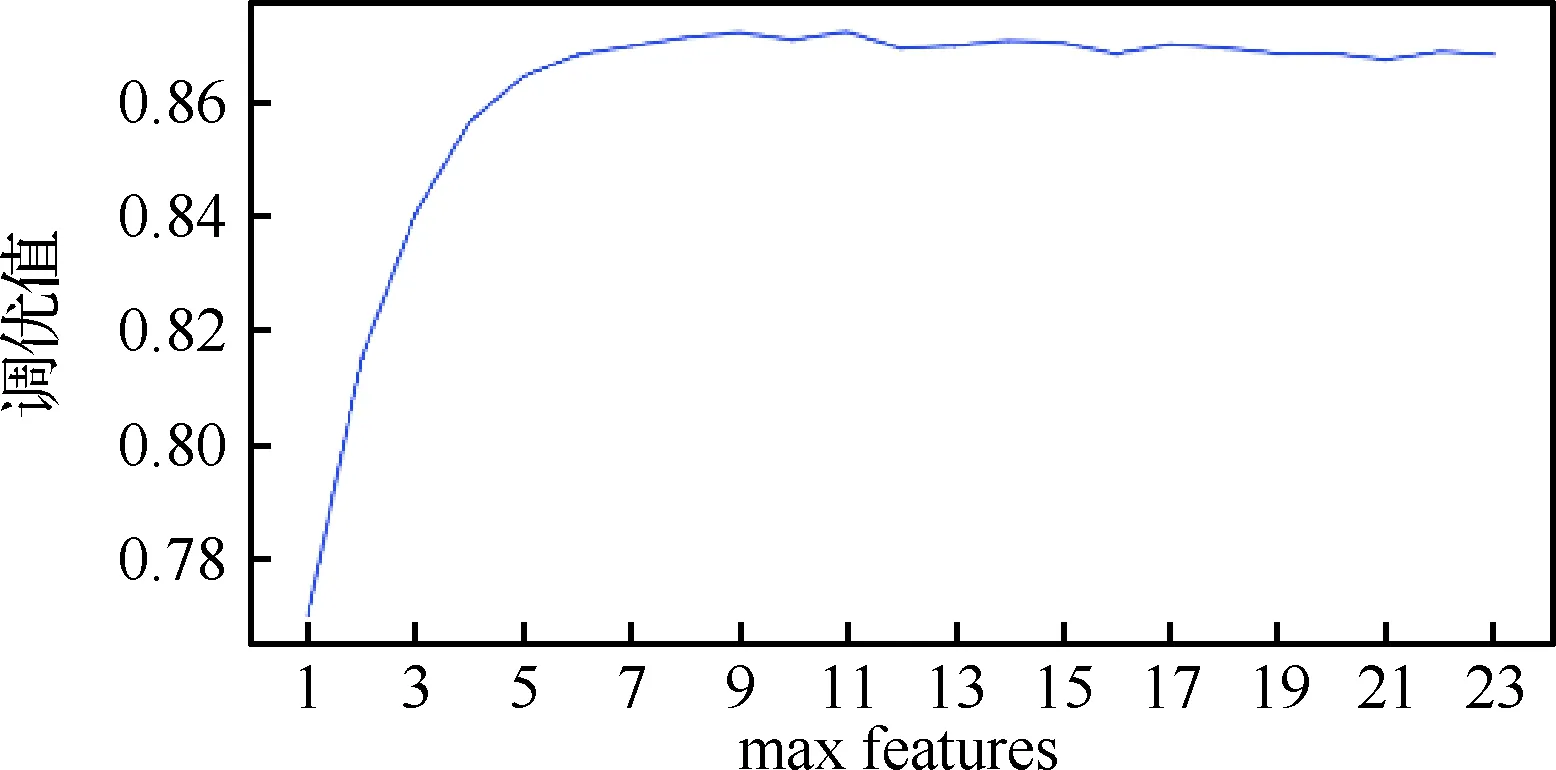
圖3 最大特征數(shù)調(diào)優(yōu)
3 算例與分析
UGKS方法的數(shù)據(jù)作為訓(xùn)練集中最重要數(shù)據(jù)來源之一,需要確保能夠?qū)ο”》瞧胶饬鲌鲞M(jìn)行較為準(zhǔn)確的描述,因此首先與文獻(xiàn)中DSMC[25]數(shù)據(jù)進(jìn)行對比,驗(yàn)證UGKS方法的準(zhǔn)確性。計(jì)算采用單原子氬氣圓柱繞流,來流條件Ma=5,Kn=0.1,來流分子數(shù)密度為n=1.294 4×1021/m3,黏性系數(shù)μ∞=2.117×10-5Pa·s,壁面溫度為Tw=273 K,壁面與DSMC保持一致均設(shè)置為漫反射邊界條件。UGKS方法物理空間網(wǎng)格剖分為50×64,速度空間離散網(wǎng)格剖分為93×93。
圖4和圖5給出了UGKS和DSMC兩種方法沿圓柱表面從駐點(diǎn)到后緣的物面應(yīng)力θ、熱流q結(jié)果對比曲線。其中橫坐標(biāo)為圓柱表面位置與圓心連線與y軸夾角角度,縱坐標(biāo)分別為表面熱流與黏性應(yīng)力值。從計(jì)算結(jié)果可以看出,UGKS結(jié)果與DSMC結(jié)果吻合較好,驗(yàn)證了UGKS計(jì)算模塊的可靠性。

圖4 UGKS與DSMC熱流對比

圖5 UGKS與DSMC應(yīng)力對比
本文所發(fā)展的改進(jìn)DNCR方法采用旋轉(zhuǎn)不變量作為特征值和標(biāo)記值,在任意方向的坐標(biāo)系下均能夠得到相同的流場結(jié)果,與實(shí)際物理現(xiàn)象吻合。原有DNCR方法直接采用流場物理量作為機(jī)器學(xué)習(xí)模型特征值和標(biāo)記值,對訓(xùn)練集坐標(biāo)系發(fā)生旋轉(zhuǎn)、平移后的待預(yù)測狀態(tài)無法開展準(zhǔn)確預(yù)測。為了便于方法之間對比,算例僅展示固定坐標(biāo)系下的對比結(jié)果。需要說明的是,改進(jìn)DNCR方法針對任意坐標(biāo)系(旋轉(zhuǎn)、平移)后的待預(yù)測狀態(tài)都能得到相同的流場計(jì)算結(jié)果。
為了反映新的特征參數(shù)構(gòu)造所帶來的模型泛化性能提升,選取二維圓柱和二維方腔兩種外形進(jìn)行驗(yàn)證和對比,并對部分待預(yù)測狀態(tài)進(jìn)行適當(dāng)?shù)膸缀瓮庑巫兓6S圓柱采用直徑0.304 8 m(12 in)下的數(shù)據(jù)為訓(xùn)練集,分別預(yù)測直徑 0.304 8 m下的二維圓柱外形,長軸0.609 6 m、短軸0.304 8 m的二維橢圓柱外形兩種幾何形狀在不同Kn數(shù)下的流場結(jié)果。二維方腔以外形 1 m×1 m的數(shù)據(jù)為訓(xùn)練集,分別預(yù)測1 m×1 m,2 m×1 m兩種幾何外形方腔在不同Kn數(shù)下的流場結(jié)果。最終所得結(jié)果的精度提升采用式(14)進(jìn)行評估:
(13)
3.1 二維圓柱氬氣高超聲速繞流
首先驗(yàn)證二維圓柱外形下的預(yù)測結(jié)果,計(jì)算采用單原子氣體氬氣,來流馬赫數(shù)與來流溫度分別為Ma=10,T0=198.439 K,氣體的物性參數(shù)取μ0=5.071 158×10-5Pa·s,γ=1.667,Pr=0.667,R=208.16 J/(kg·K),逆冪律冪次ε=0.734,UGKS計(jì)算模型采用簡單硬球模型。模型的訓(xùn)練數(shù)據(jù)來自Kn=0.73與Kn=1.09這2組狀態(tài),網(wǎng)格大小為33×91(周向×徑向),圓柱直徑為0.304 8 m,第1層網(wǎng)格間距為1×-3m。
第1組待預(yù)測稀薄非平衡狀態(tài)為Kn=0.91同尺寸二維圓柱繞流,除來流密努森數(shù)變化外,其余氣體屬性相同,計(jì)算網(wǎng)格如圖6所示。圖7與圖8給出了不同計(jì)算方法溫度云圖對比,DNCR-RI(DNCR-Rotarional Invariants)為當(dāng)前采用旋轉(zhuǎn)不變量的改進(jìn)DNCR方法。為了更好的表現(xiàn)N-S、UGKS、改進(jìn)DNCR流場結(jié)果的差異,截取圖中網(wǎng)格對稱軸y=-x截線(45°截線),對比截線上各項(xiàng)流場物理量的結(jié)果,如圖9~圖12所示。

圖6 直徑0.304 8 m二維圓柱網(wǎng)格示意圖

圖7 N-S與UGKS圓柱溫度對比

圖8 DNCR-RI與UGKS圓柱溫度對比
由計(jì)算結(jié)果可以看出,在來流Kn=0.91條件下,圓柱繞流頭部弓形激波附近區(qū)域表現(xiàn)出明顯稀薄非平衡特征,激波厚度由于平均分子自由程增大明顯變大。與UGKS與DNCR方法相比,N-S方程預(yù)示得到的激波位置更加靠近物面,激波脫體距離更小,表明N-S方程的連續(xù)性假設(shè)在這個來流條件下部分失效,無法對稀薄非平衡流場進(jìn)行準(zhǔn)確描述,而UGKS與DNCR流場結(jié)構(gòu)較為一致。對比N-S與UGKS計(jì)算結(jié)果,采用精度提升式(13)分別考察DNCR計(jì)算精度,可以得到壓力精度提升49.09%,溫度精度提升61.02%,x軸方向速度U精度提升43.85%,y軸方向速度V精度提升48.26%,表明現(xiàn)有DNCR方法在相同外形、不同Kn數(shù)下有較好的預(yù)測表現(xiàn)。

圖9 DNCR與UGKS圓柱截線y=-x上壓力對比
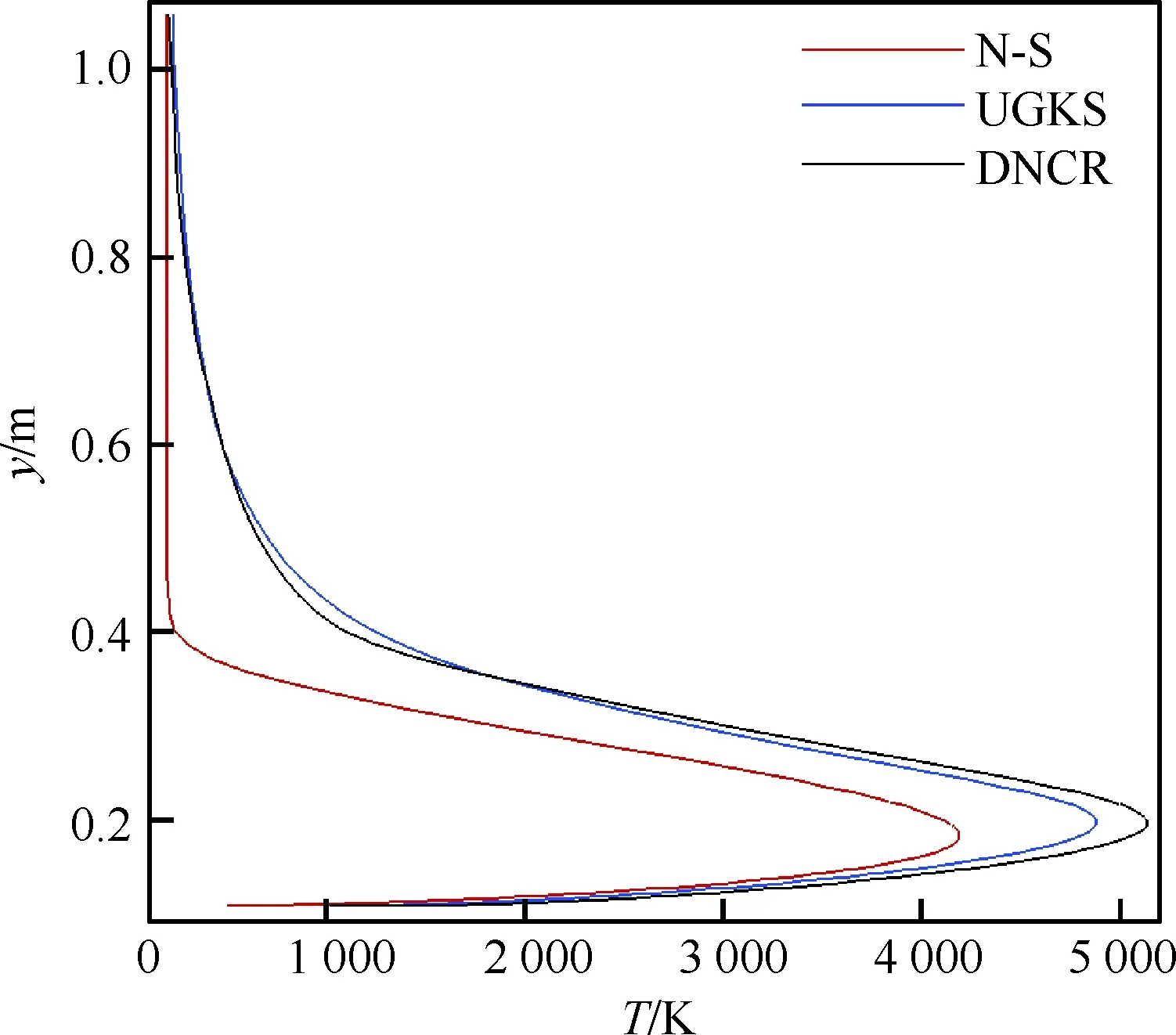
圖10 DNCR與UGKS圓柱截線y=-x上溫度對比
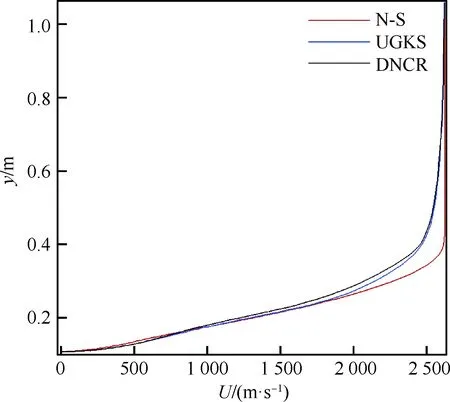
圖11 DNCR與UGKS圓柱截線y=-x上速度U對比
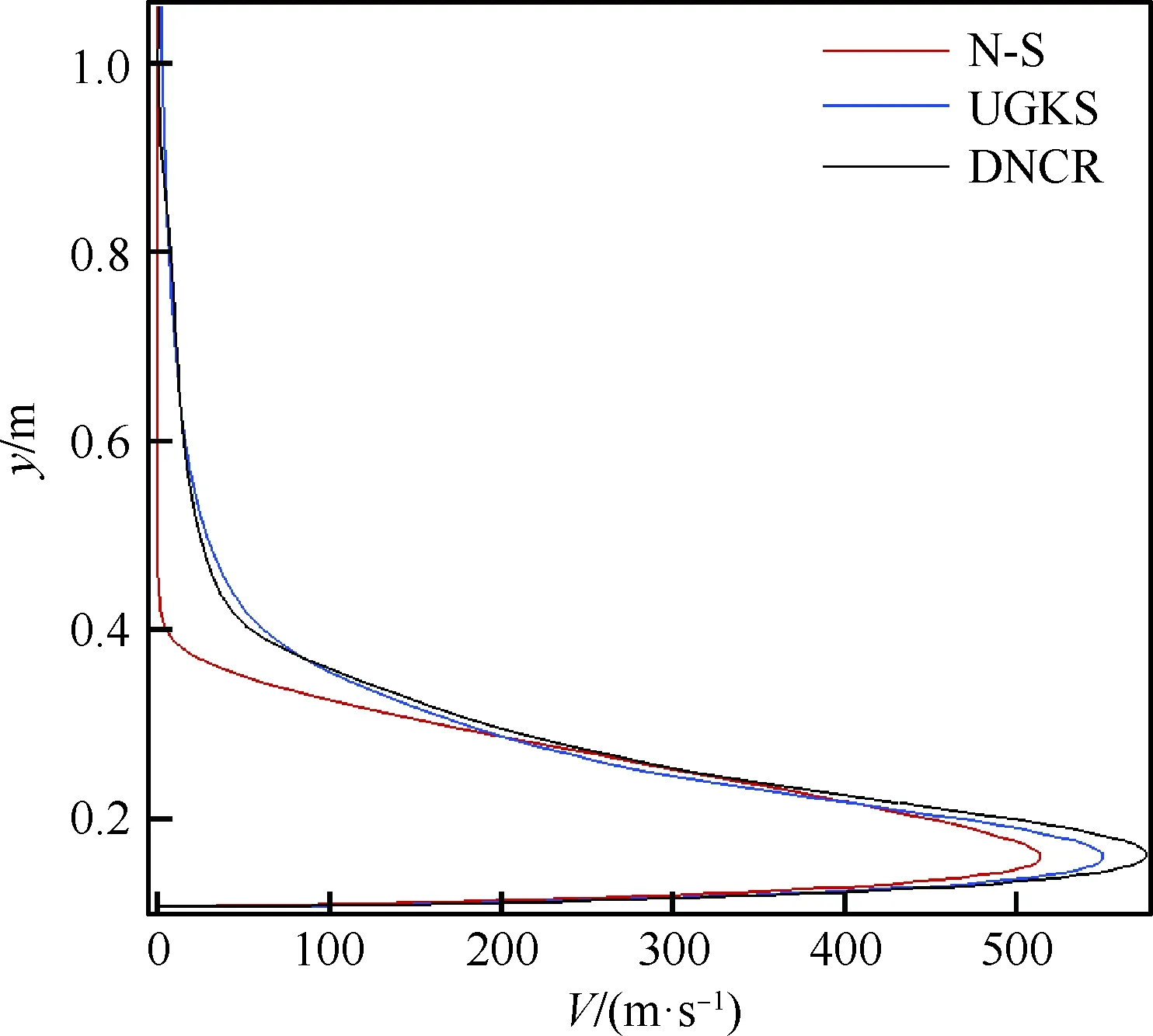
圖12 DNCR與UGKS圓柱截線y=-x上速度V對比
圖13和圖14反映了N-S、UGKS、DNCR 3種計(jì)算方式得到的摩擦阻力系數(shù)Cf和表面熱流對比,可以看到DNCR方法得到的結(jié)果與UGKS十分吻合,表明DNCR方法在氣動熱和摩阻預(yù)測方面也呈現(xiàn)了較好的預(yù)測能力。
為了測試改進(jìn)DNCR方法模型的泛化性能,針對外形改變的情況進(jìn)行了預(yù)測和結(jié)果對比。第2組待預(yù)測狀態(tài)采用Kn=0.91,外形為長軸0.609 6 m、短軸0.304 8 m的二維橢圓柱,其余各項(xiàng)設(shè)置相同,計(jì)算網(wǎng)格如圖15所示,重點(diǎn)考察進(jìn)DNCR方法模型在變外形條件下泛化性能提升情況。圖16和圖17給出了不同計(jì)算方法溫度云圖對比。
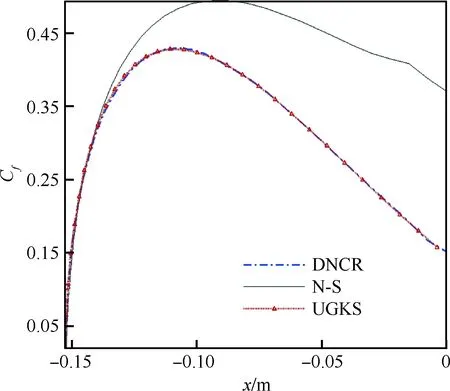
圖13 圓柱表面沿x方向摩擦阻力系數(shù)
圖18~圖21中DNCR-RV(DNCR-Rotational Variants)為原有采用旋轉(zhuǎn)可變物理量的DNCR方法,可以明顯看出改進(jìn)DNCR方法得到的結(jié)果趨勢與UGKS結(jié)果更吻合。
若采用精度提升式(13)進(jìn)行量化分析,改進(jìn)DNCR方法對壓力的精度提升為-10.01%,對溫度的精度提升為71.19%,速度U的精度提升為63.80%,速度V的精度提升為53.36%。而原始DNCR方法的壓力精度提升為-90.52%,溫度精度提升為71.14%,速度U精度提升為57.07%,速度V精度提升為-42.76%。通過精度提升對比可以發(fā)現(xiàn),當(dāng)待預(yù)示幾何外形發(fā)生變化時(shí),原始DNCR方法以含有空間坐標(biāo)系方向信息的數(shù)據(jù)作為訓(xùn)練集,得到的預(yù)測結(jié)果精度提升不如采用基于旋轉(zhuǎn)不變量改進(jìn)DNCR方法,尤其是對諸如壓力與y方向速度V的預(yù)示。計(jì)算結(jié)果初步表明,改進(jìn)DNCR方法擁有更強(qiáng)的模型泛化性能,針對變幾何構(gòu)型的流場預(yù)示能力明顯增強(qiáng)。
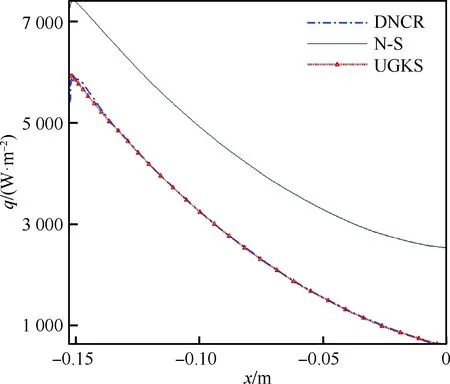
圖14 圓柱表面沿x方向熱流分布

圖15 長軸0.609 6 m、短軸0.304 8 m二維橢圓柱網(wǎng)格示意圖
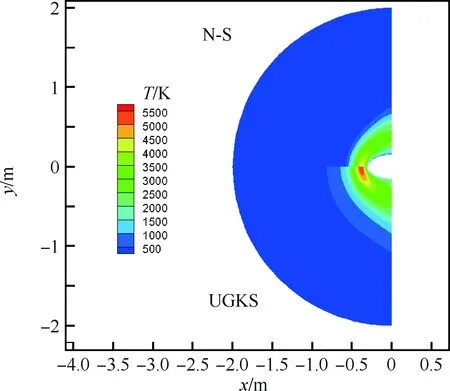
圖16 N-S與UGKS橢圓柱溫度對比示意圖

圖17 DNCR-RI與UGKS橢圓柱溫度對比示意圖
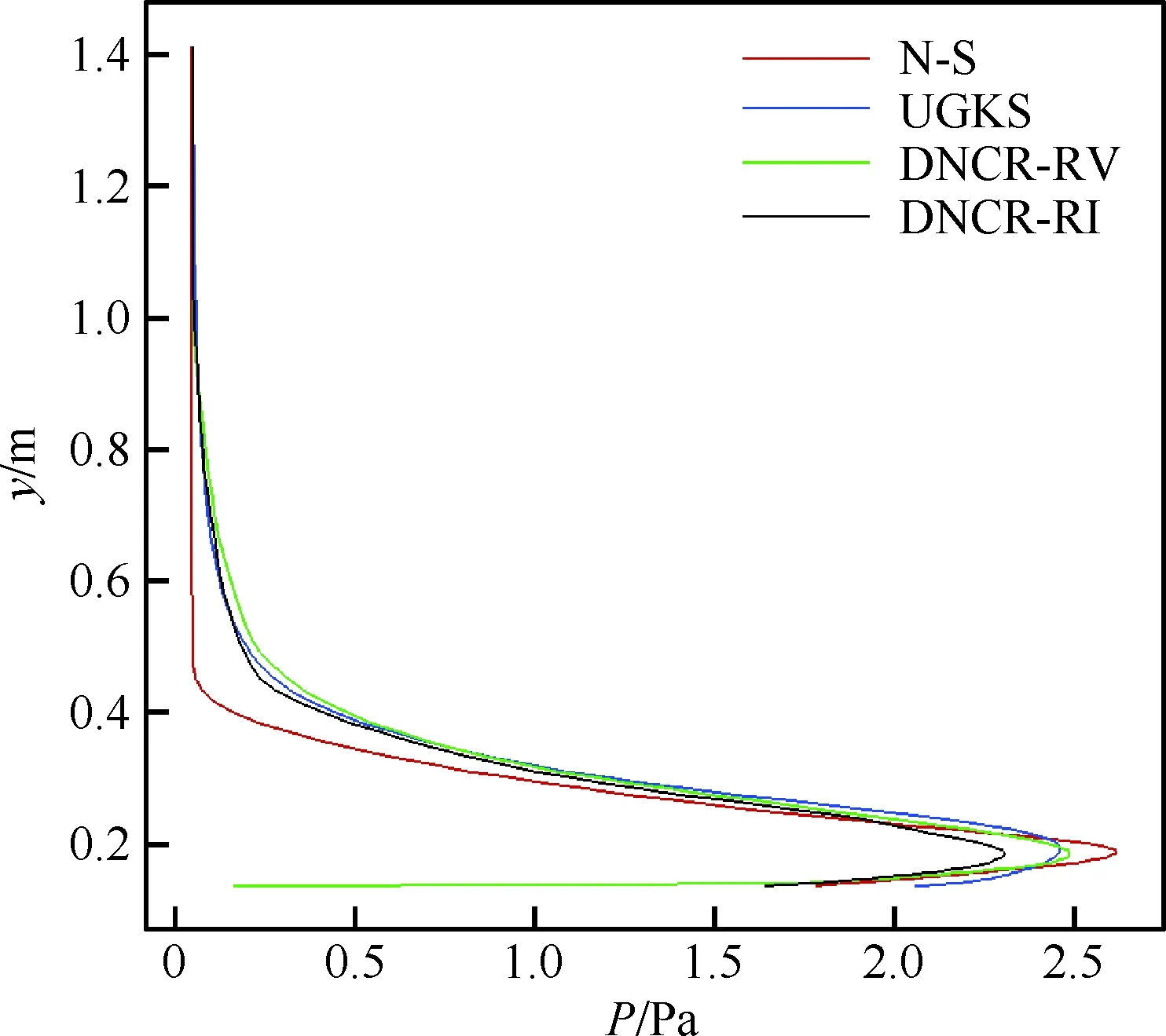
圖18 橢圓柱流場截線y=-x上壓力對比

圖19 橢圓柱流場y=-x截線溫度對比
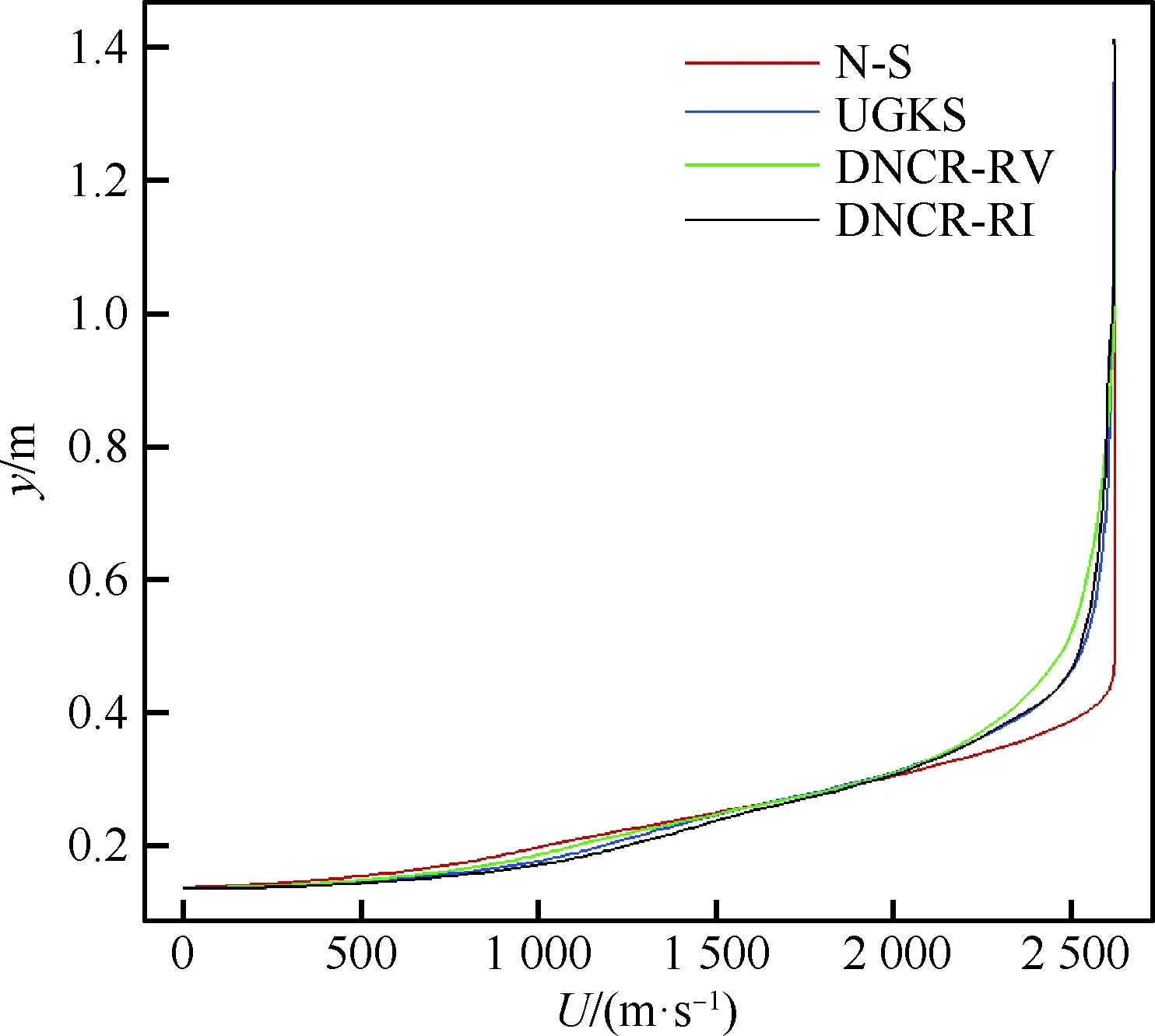
圖20 橢圓柱流場截線y=-x速度對比
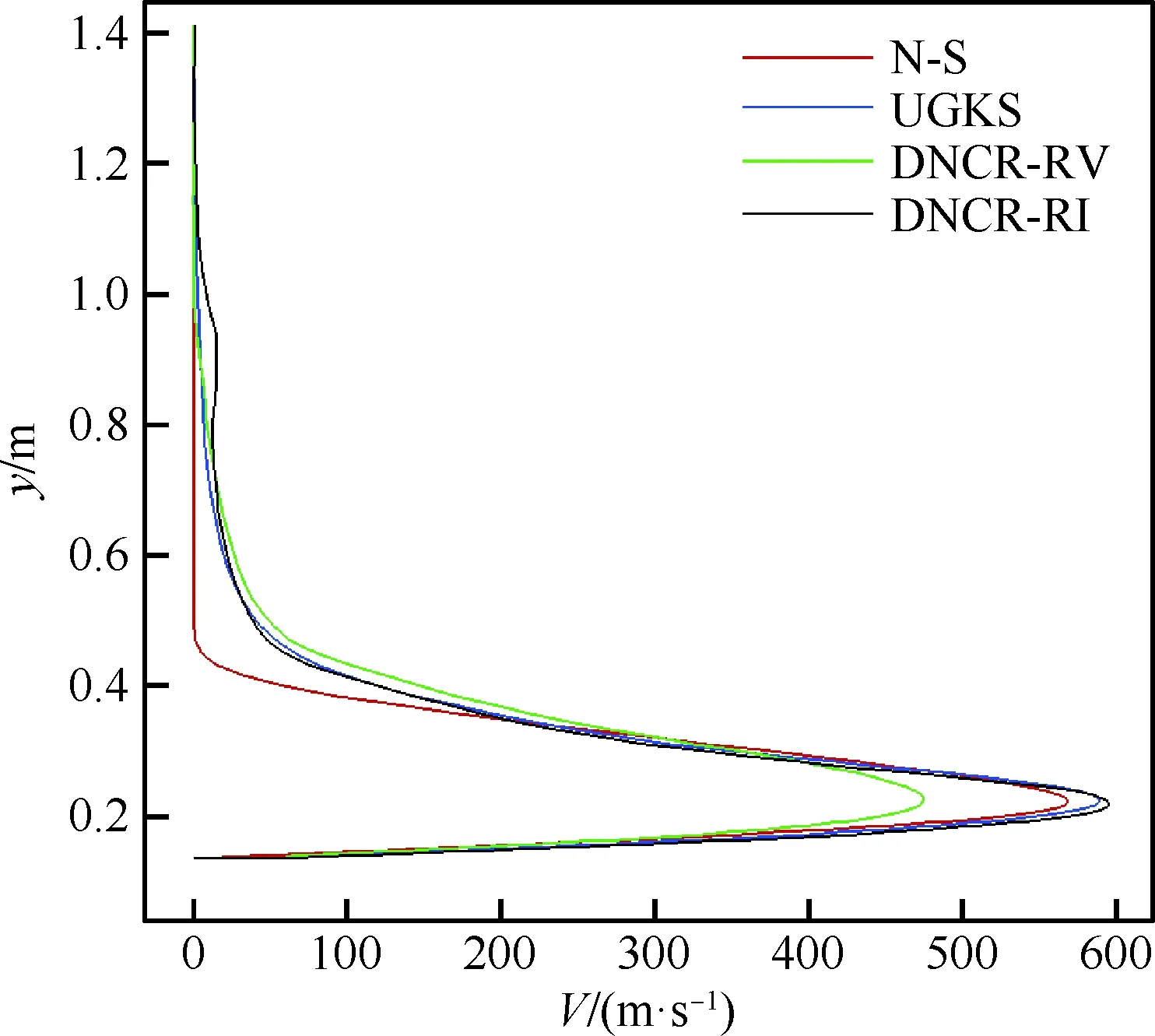
圖21 橢圓柱流場y=-x截線速度對比
3.2 頂蓋方腔驅(qū)動流
為進(jìn)一步驗(yàn)證改進(jìn)DNCR方法的計(jì)算能力與泛化性能,對二維頂蓋方腔驅(qū)動流進(jìn)行了計(jì)算與分析。計(jì)算采用單原子氣體氬氣,初始流場溫度T0=300 K,氣體物性參數(shù)取μ0=2.272×10-5Pa·s,γ=1.667,Pr=0.667,R=208.16 J/(kg·K),逆冪律冪次取ε=0.81,UGKS計(jì)算模型采用簡單硬球模型。模型的訓(xùn)練數(shù)據(jù)來自Kn=0.003 2、Re=44.0與Kn=0.002 375、Re=59.3這2組狀態(tài),物理計(jì)算網(wǎng)格為61×61的均勻網(wǎng)格,速度離散空間網(wǎng)格為28×28均勻分布,計(jì)算域尺寸為1 m×1 m。
第1組待預(yù)測狀態(tài)Kn=0.002 85、Re=49.4,幾何尺寸保持不變,同為1 m×1 m的方腔,其余各項(xiàng)設(shè)置相同,計(jì)算網(wǎng)格如圖22所示。圖23~圖26分別展示了x=0.5 m截線處壓力、溫度、速度U、速度V的對比。

圖22 1 m×1 m方腔示意圖 Fig.22 Schematic diagram of a 1 m×1 m squarecavity
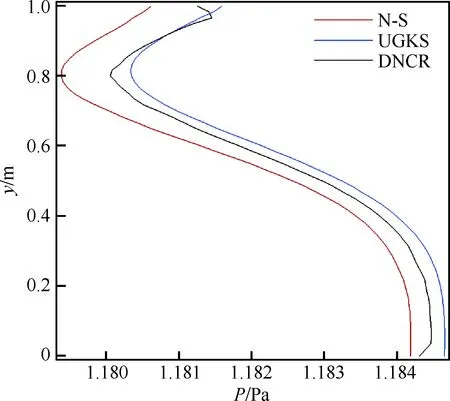
圖23 1 m×1 m方腔截線x=0.5 m上壓力
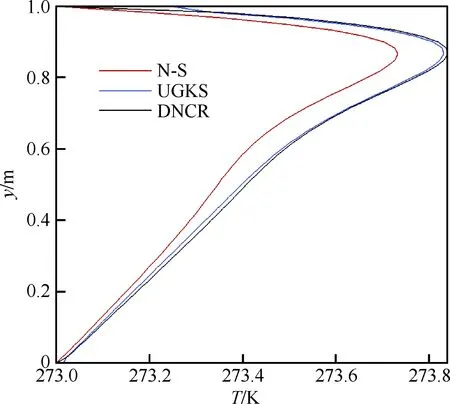
圖24 1 m×1 m方腔截線x=0.5 m上溫度
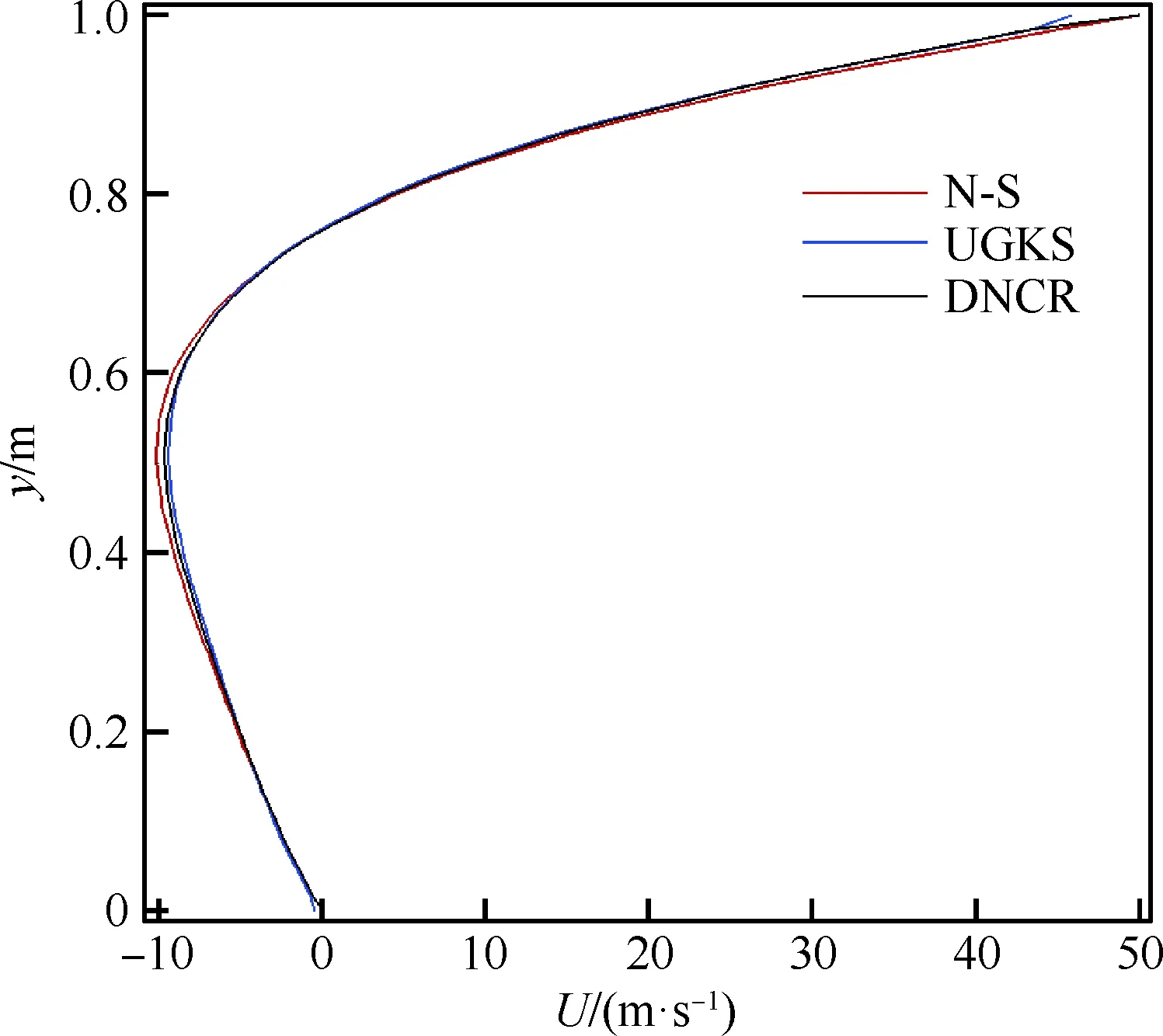
圖25 1 m×1 m方腔截線x=0.5 m上速度U
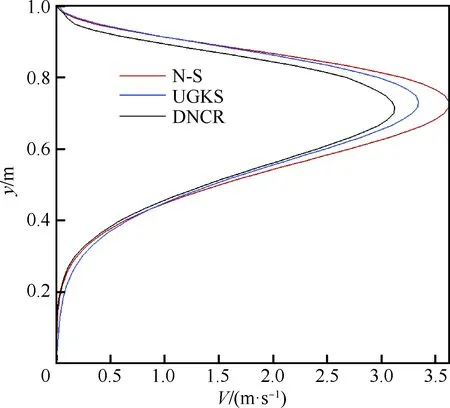
圖26 1 m×1 m方腔截線x=0.5 m上速度V
為量化DNCR計(jì)算精度提升情況,借助精度提升計(jì)算式(13),得到x=0.5 m處壓力精度提升68.15%,溫度精度提升55.89%,速度U精度提升31.74%,速度V精度提升-20.38%,速度V截線處絕對值較小,由于特征值和標(biāo)記值不涉及方向,所以預(yù)示結(jié)果較差,而絕對值較大的速度U結(jié)果明顯較好,當(dāng)?shù)伛R赫數(shù)精度提升了31.66%,受速度V影響較小。圖27~圖30給出了方腔流場截線y=0.5 m上流場物理量分布曲線。

圖27 1 m×1 m方腔截線y=0.5 m上壓力

圖28 1 m×1 m方腔截線y=0.5 m上溫度

圖29 1 m×1 m方腔截線y=0.5 m上速度U
如圖27~圖30所示,y=0.5 m截線上壓力精度提升77.47%,溫度精度提升58.66%,速度U精度提升69.43%,速度V精度提升44.49%,整體預(yù)示結(jié)果較好。
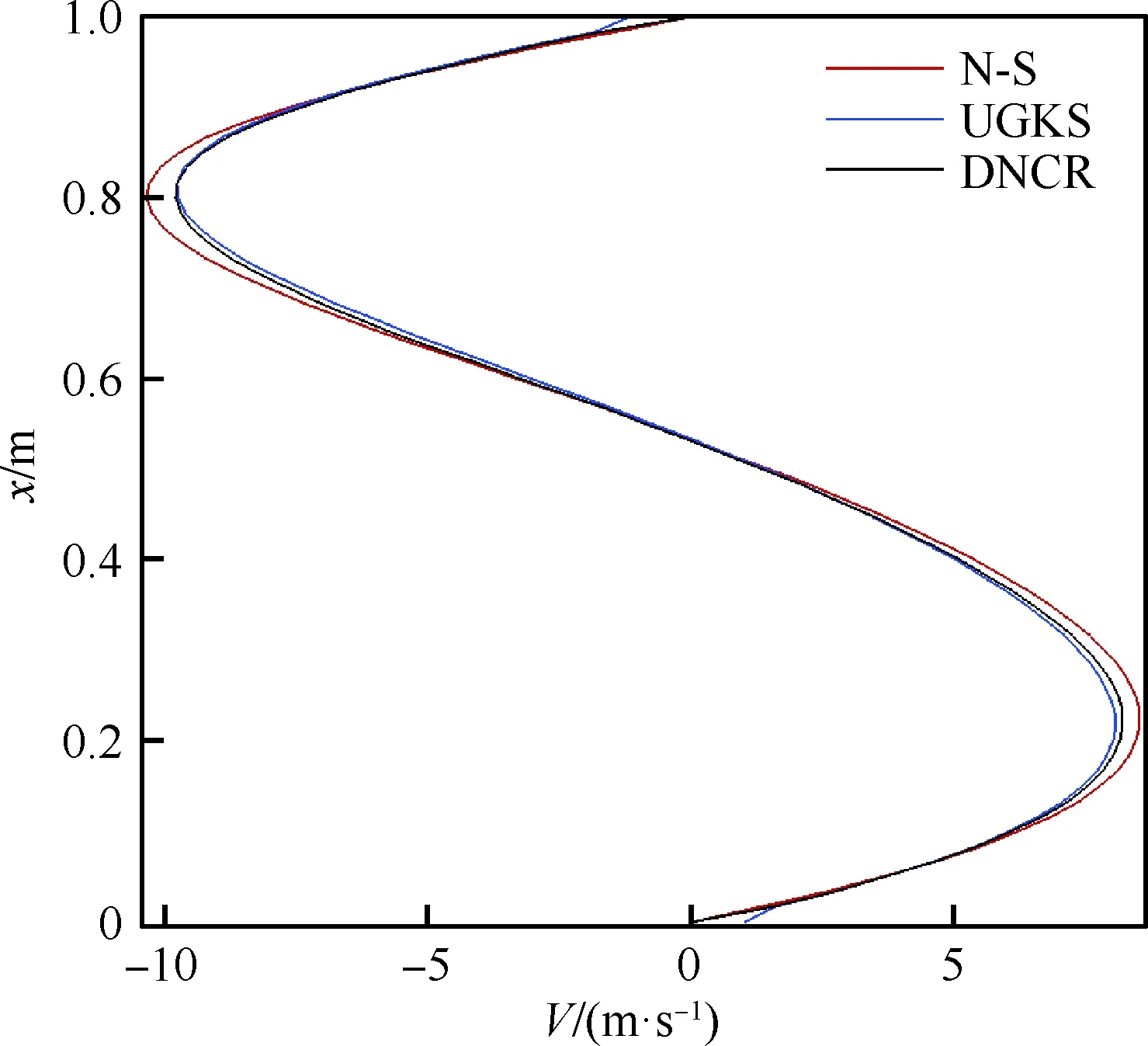
圖30 1 m×1 m方腔截線y=0.5 m上速度V
為了考察方法的泛化性能,對變外形情形進(jìn)行了預(yù)測和對比。第2組待預(yù)測狀態(tài)為Kn=0.002 85,Re=49.4,計(jì)算幾何外形為2 m×1 m的方腔,其余各項(xiàng)設(shè)置相同,網(wǎng)格如圖31所示。截取相對位置與第1組算例相同,分別給出x=1 m、y=0.5 m處的壓力、溫度、速度U、速度V結(jié)果,其中x=1 m截線計(jì)算結(jié)果如圖32~圖35所示。
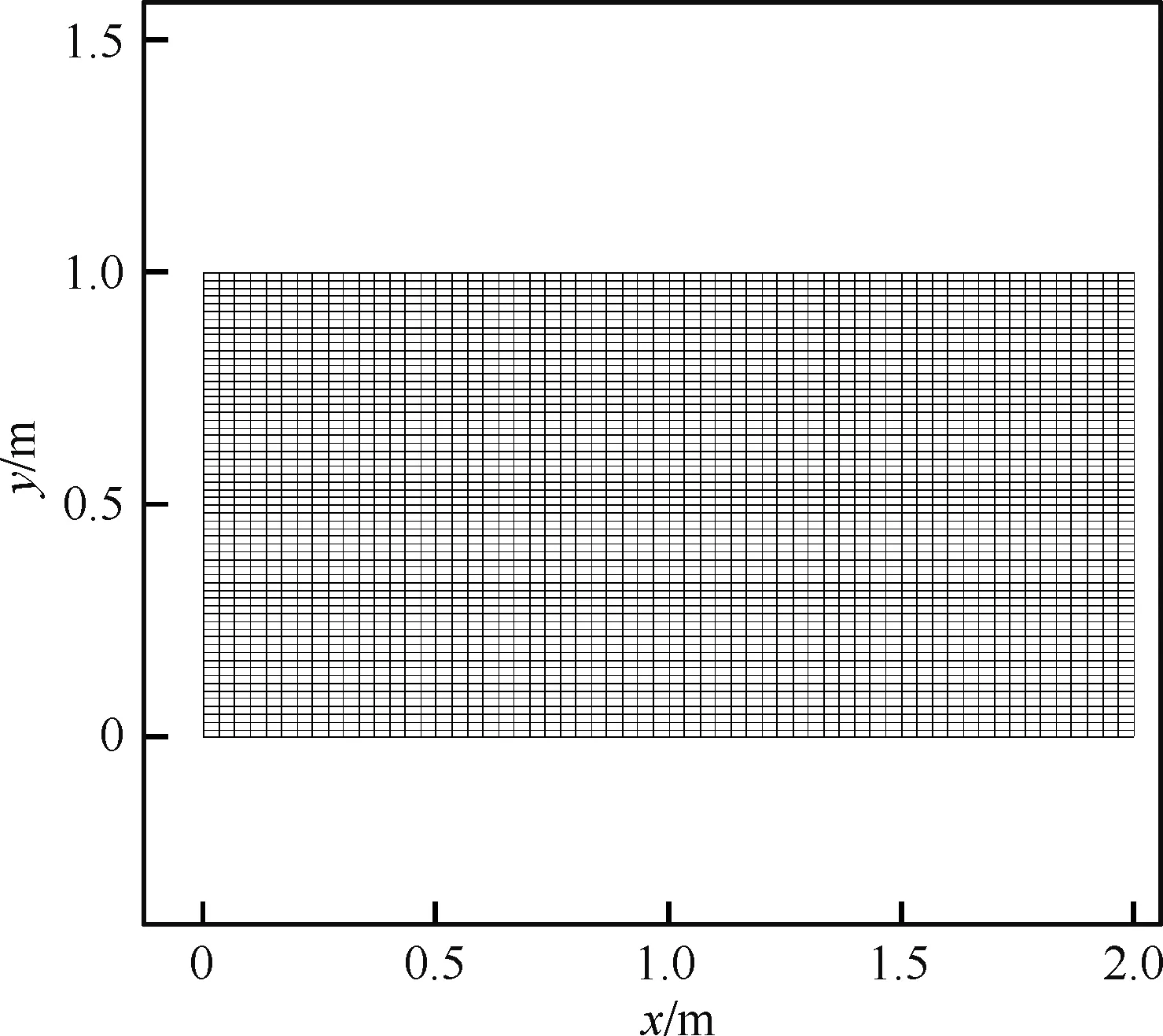
圖31 2 m×1 m方腔示意圖
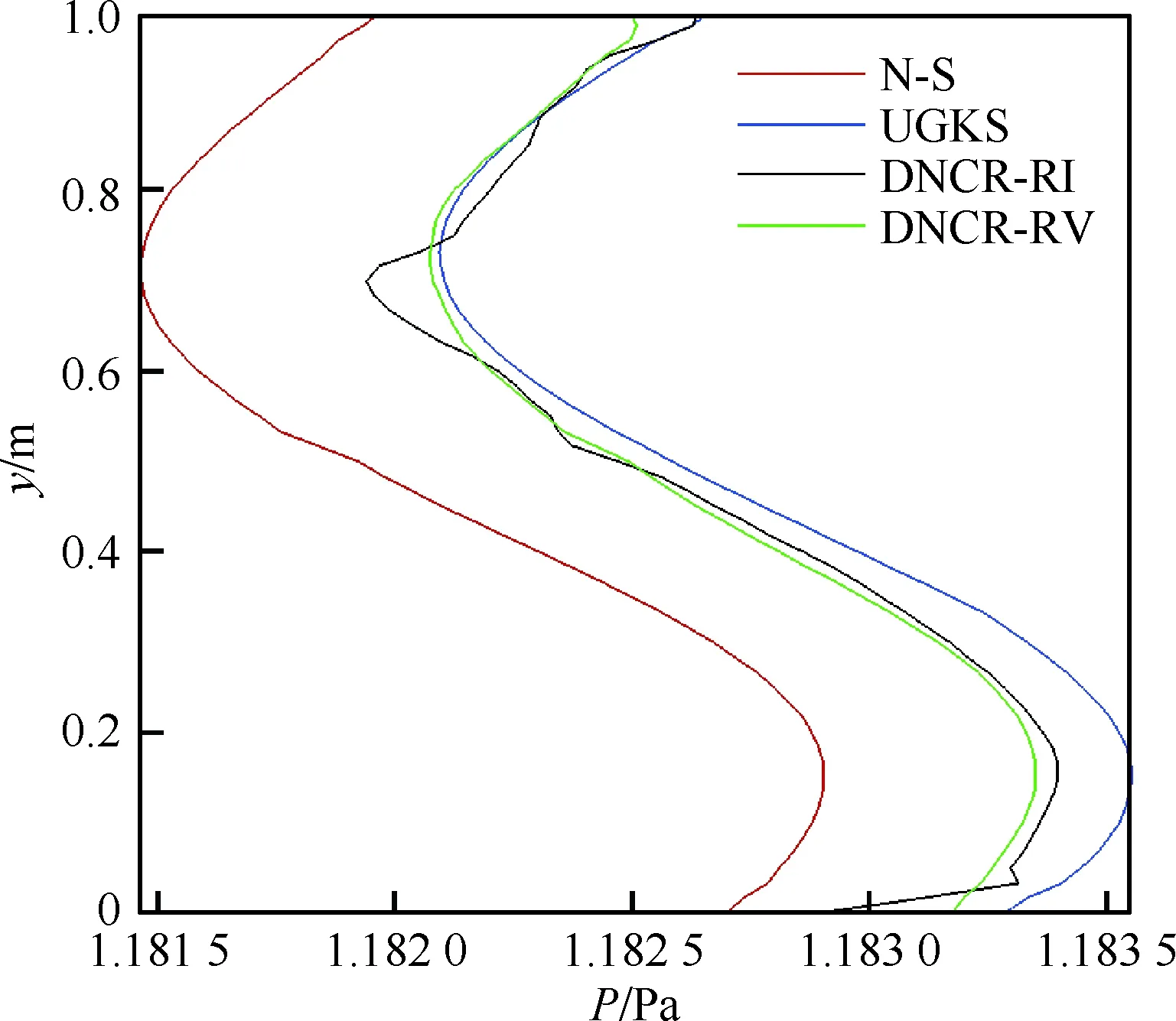
圖32 2 m×1 m方腔截線x=1 m上壓力

圖33 2 m×1 m方腔截線x=1 m上溫度

圖34 2 m×1 m方腔截線x=1 m上速度U
在x=1 m處壓力精度提升80.32%,溫度精度提升45.12%,速度U精度提升36.57%,速度V精度提升39.65%。y=0.5 m的截線結(jié)果如圖36~圖39所示。
在y=0.5 m處壓力精度提升54.63%,溫度精度提升4.49%,速度U精度提升42.49%,速度V精度提升3.72%。
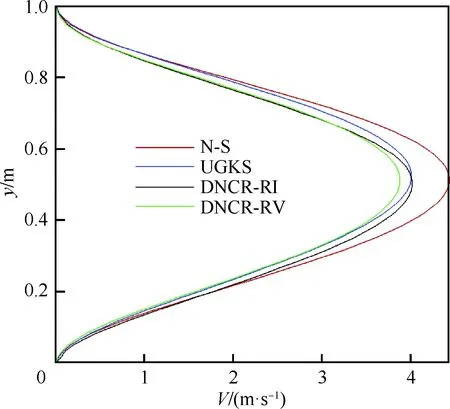
圖35 2 m×1 m方腔截線x=1 m上速度V

圖36 2 m×1 m方腔截線y=0.5 m上壓力

圖37 2 m×1 m方腔截線y=0.5 m上溫度
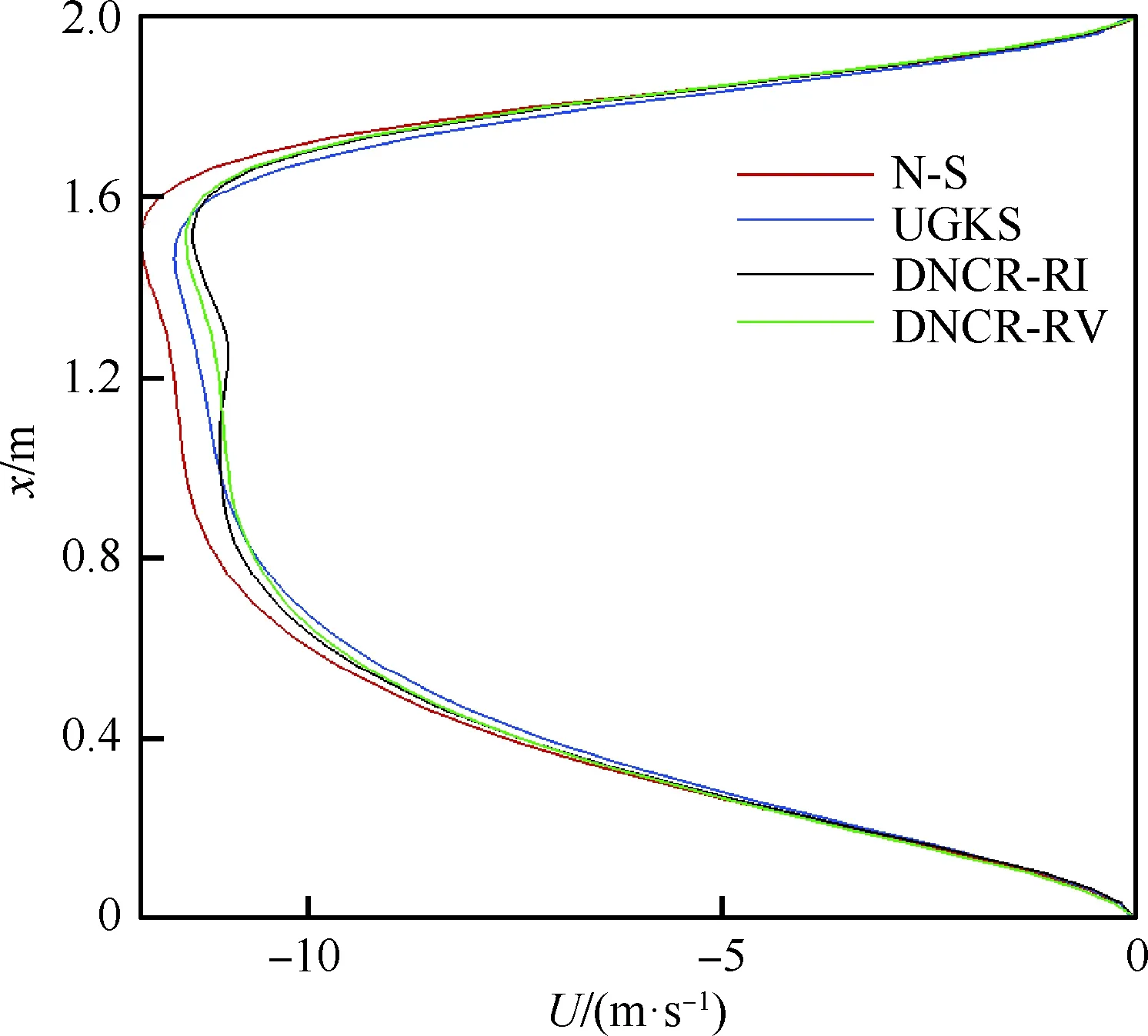
圖38 2 m×1 m方腔截線y=0.5 m上速度U

圖39 2 m×1 m方腔截線y=0.5 m上速度V
通過對固定坐標(biāo)系不同狀態(tài)下二維圓柱與方腔算例的驗(yàn)證,從流場關(guān)鍵位置截線對比壓力、溫度、速度分布可以看出:改進(jìn)DNCR方法對不同來流狀態(tài)、訓(xùn)練集相同外形、變幾何外形的流場參數(shù)均能作出較好的預(yù)測,且當(dāng)外形發(fā)生改變時(shí),預(yù)測效果優(yōu)于原有DNCR方法,表明改進(jìn)模型擁有更好的泛化性能。更為重要的是,若坐標(biāo)系發(fā)生旋轉(zhuǎn)時(shí),改進(jìn)DNCR方法的流場結(jié)果與提升效果保持不變,原始DNCR方法則囿于特征值和標(biāo)記值不具備旋轉(zhuǎn)不變性而無法進(jìn)行預(yù)測,因此未在文中進(jìn)行量化比較,這也從另一方面反映了改進(jìn)DNCR特征量具備旋轉(zhuǎn)不變性的重要意義。
4 結(jié) 論
本文在原始DNCR方法的基礎(chǔ)上發(fā)展了基于旋轉(zhuǎn)不變量的改進(jìn)DNCR方法,對機(jī)器學(xué)習(xí)模型的特征值和標(biāo)記值進(jìn)行了重新篩選與處理,使其滿足旋轉(zhuǎn)不變性約束,最終使得訓(xùn)練模型的預(yù)示能力與范圍得到增強(qiáng),解決了原始DNCR方法不適用于旋轉(zhuǎn)坐標(biāo)后的流場精確預(yù)示這一難題。改進(jìn)DNCR方法的計(jì)算流程與原始方法一致,即將修正應(yīng)力與熱流預(yù)測結(jié)果代入守恒方程進(jìn)行迭代并計(jì)算至收斂,在模型訓(xùn)練完成后,DNCR總計(jì)算時(shí)長等于N-S方程計(jì)算時(shí)長+模型預(yù)測時(shí)長+DNCR續(xù)算時(shí)長,預(yù)測時(shí)長相較N-S與DNCR計(jì)算時(shí)長可忽略不計(jì),因此總計(jì)算時(shí)長與N-S方程處于同一量級,但計(jì)算精度較N-S方程得到大幅提升。以固定坐標(biāo)系下的氬氣二維高超聲速圓柱繞流和頂蓋方腔驅(qū)動流為例,針對原有外形和變幾何外形的待預(yù)示狀態(tài),將改進(jìn)的DNCR方法結(jié)果與N-S方程、UGKS方法及原有DNCR方法進(jìn)行了對比,結(jié)果表明使用旋轉(zhuǎn)不變量能夠顯著提升訓(xùn)練模型對外形變化的適應(yīng)能力,使其表現(xiàn)出更好的泛化性能,進(jìn)一步提高了DNCR方法的適用場景與應(yīng)用范圍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
