車路協同的插電式汽車預測能量管理策略研究
2023-01-11 06:33:52陳慧勇楊學青趙治國高建平
河南科技大學學報(自然科學版) 2023年2期
陳慧勇,李 濤,,楊學青,趙治國,高建平
(1.宇通客車股份有限公司,河南 鄭州 450016;2.同濟大學 汽車學院,上海 201804;3.河南科技大學 車輛與交通工程學院,河南 洛陽,471003)
0 引言
隨著車輛和道路基礎設施互聯(vehicle-to-infrastructure,V2I)和車路協同系統(cooperative vehicle and infrastructure system, CVIS)技術的快速發展,車輛可實時獲取城市交通信號燈信息,規劃經濟車速實現生態駕駛(Eco-driving)[1],進一步節能減排[2]。
為減少車輛在交通路口起停,文獻[3]提出一種考慮信號燈切換周期的車速控制算法,運用模型預測控制(model predictive control,MPC)方法跟蹤車速曲線,能使車輛免停車通過信號燈,相比基于吉普斯(Gipps)模型的跟蹤方法更節油。文獻[4]根據駕駛員駕駛習慣對通過交叉口的速度進行優化,從而減低油耗,縮短等待時間。上述研究雖取得較好仿真效果,但實時性與有效性未經臺架或實車試驗驗證。
文獻[5]基于車輛運動學模型,采用遺傳算法和分支定界算法對連續交叉路口的通行車速進行優化,優化后輔助系統與駕駛員自由駕駛相比,節省燃油消耗達15.1%。文獻[6]以油耗最小為優化目標,建立兩信號燈通行最優控制問題,采用稀疏非線性優化器(sparse nonlinear optimizer, SNOPT)求解,在設定場景下可有效提升車輛經濟性。文獻[7]通過馬爾科夫鏈構建紅綠燈概率模型,利用A*算法求解最優通行車速,該方法可減少計算用時,且在交通信號燈密集處優勢明顯。但上述關于信號燈路口的研究主要針對傳統內燃汽車且采用交通模型,沒有考慮經濟車速和新能源汽車相結合能夠帶來的優勢和潛力。
文獻[8-9]針對混合動力汽車(hybrid electric vehicle, HEV)提出一種分層控制策略,上層根據信號燈狀態及車輛狀態信息計算最佳通行車速,下層采用改進能量管理策略跟蹤經濟車速并優化整車動力源轉矩分配。文獻[10]針對燃料電池混合動力卡車,采用分段三角函數算法[11]對信號燈場景下的經濟車速進行規劃,硬件在環仿真(hardware in-the-loop, HiL)試驗表明該策略能提升7%左右的能量經濟性。文獻[12]針對HEV提出一種基于智能交通系統(intelligent transportation system, ITS)的經濟駕駛方法,通過沖擊波(Shockwave)模型對車流及其排隊過程進行建模,在節油8.7%的同時,以較低加速度實現了最佳的駕駛舒適性。文獻[13]針對純電動汽車提出了一種基于最優控制的經濟性駕駛車速優化策略,仿真實驗表明該策略相較于加速-勻速-制動策略可實現9.2%的能量節省。文獻[14-15]針對插電式混合動力汽車(plug-in hybrid electric vehicle, PHEV)提出了 ecological adaptive cruise controller(ECO-ACC)雙層控制器,上層控制器根據歷史交通信號燈信息,利用動態規劃求解全局經濟車速曲線,下層控制器在保證安全的前提下跟隨經濟車速曲線,HiL試驗表明該控制器具有較好的節油效果。上述基于經濟車速規劃的能量管理策略主要使用傳統經濟車速規劃算法,利用智能優化算法對信號燈場景進行經濟車速規劃的較少,且未與插電式混合動力汽車能量管理策略相結合。
本文以某P2構型PHEV為研究對象,針對市區信號燈路口場景,運用動態規劃及高斯(Gauss)偽普法優化求解經濟車速。提出了基于 MPC的PHEV能量優化管理策略,其采用迪杰斯特拉(Dijkstra)算法求解最優轉矩分配,并搭建了駕駛員在環硬件仿真試驗平臺,驗證了所提出的經濟車速規劃和預測優化能量管理策略的有效性。
1 PHEV動力系統構型
本文以某款P2構型的PHEV作為研究對象。該PHEV混合動力系統主要包含發動機、驅動電機、動力電池以及6速自動變速器(6-speed automatic transmisson,6AT)等部件。該PHEV為發動機前置的后驅車型,發動機輸出軸與封裝的6速自動變速箱相連。整體為單軸并聯的P2構型。值得注意的是,該混動6速變速箱在驅動電機前端安裝了1個離合器,取消了液力變矩器,構成了1款混合動力專用變速箱。其主要技術參數見表1。

表1 某款P2構型的PHEV主要技術參數
2 市區信號燈路口經濟車速規劃
2.1 信號燈場景預分析

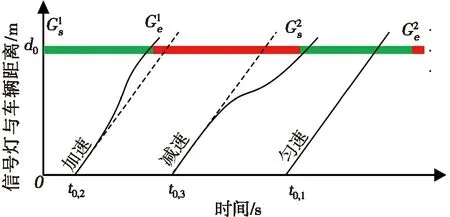
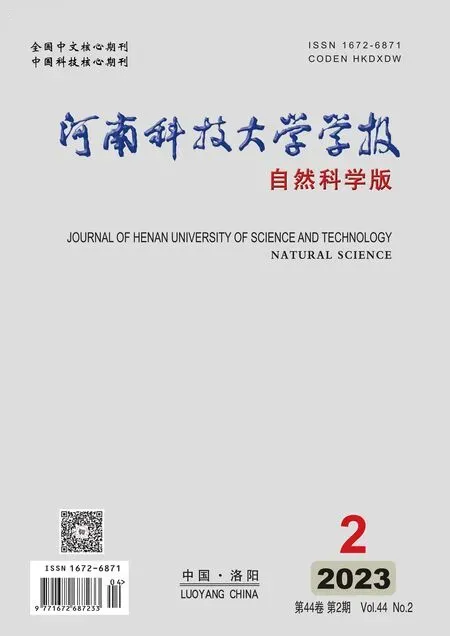
圖1 車輛到達信號燈路口不同場景示意圖
在不考慮前車遮擋情況下,車輛行駛至信號燈所需時間如下:
(1)
(2)
其中:d0為車輛與信號燈距離,m;v0為當前車速,m/s;tcr為車輛以v0行駛至信號燈所需時間,s;amax為車輛最大加速度,m/s2;tear為車輛以當前路段道路限速vlimit行駛至信號燈所需時間,s,即當前所需最短時間。
車輛通過信號燈可分為以下3種場景討論:

2.2 PHEV能耗模型建立
車輛的實際行駛工況直接決定了車輛的功率需求,進而對車輛的油耗產生影響,車輛行駛時的需求功率Pwheels計算如式(3)所示。基于車輛需求功率與能耗的關系,本文基于車輛微觀油耗及排放模型(virginia tech microscopic, VT-Micro)[16-17],將PHEV的瞬時能耗(energy consumption, EC)用多項式擬合的方式與v,v3,v·a相聯系,瞬時能耗EC計算如式(4)所示。
(3)
(4)
其中:m為車輛額定負載,kg;g為重力加速度,m/s2;θ為道路坡度角,rad;Cd為為空氣阻力因數;A為車輛迎風面積,m2;δ為車輛的旋轉質量換算因數;v為車輛速度,m/s;a為車輛加速度,m/s2;b0為常數項;b1,b2,b3為多項式系數。
基于PHEV實車轉鼓試驗數據,采用多項式擬合得到插電式混合動力汽車電量消耗(charging of depleting, CD)和電量保持(charging of sustaining, CS)階段的能耗模型。CD/CS階段PHEV能耗模型系數如表2所示。
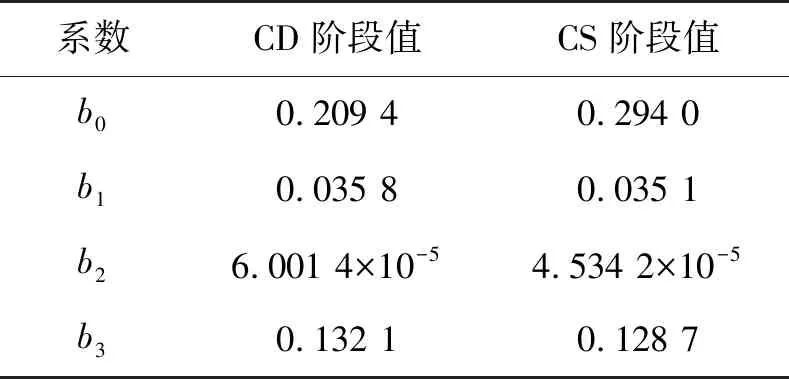
表2 CD/CS階段PHEV能耗模型系數
2.3 經濟車速規劃
將車輛通過信號燈路口場景的經濟車速規劃問題轉換為最優控制問題,選取x(t)=[x1(t),x2(t)]T=[s(t),v(t)]T作為狀態變量,u(t)=[a(t)]為控制變量[4]。狀態方程如下:
(5)
其中:s(t)為t時刻距信號燈的距離,m;v(t)為t時刻車輛的行駛車速,m/s;a(t)為t時刻車輛的行駛加速度,m/s2。
綜合考慮經濟性與駕駛員舒適性,選取目標函數為:
L(v(t),u(t))=ω1EC(v(t),a(t))+ω2a2(t),
(6)
其中:ω1,ω2為權重系數,分別為車輛經濟性以及舒適性在代價函數中所占權重。
綠燈通行約束:
(7)
速度約束:
vmin≤v(t)≤vlimit。
(8)
加速度約束:
(9)
其中:amax、amin分別為最大及最小加速度,m/s2;vlimit為當前道路限速,m/s;vmin為道路通暢時允許的最小通行速度,m/s;L為通行路段長度,m;t0、tf分別為初始、終止時間,s。
分別采用動態規劃(dynamic programming, DP)算法[18]和高斯偽譜法[19]對上述最優控制問題進行求解,得到車輛在市區信號燈路口下的經濟車速,具體規劃結果見4.1小節。
3 基于模型預測控制的PHEV能量管理策略
基于MPC的PHEV能量管理策略流程如圖2所示。首先將連續時間離散化,設當前時刻為k,控制變量為發動機轉矩;之后,基于PHEV經濟車速規劃的結果,對需求轉矩進行預測;其次,計算得到預測時域Np內的預測需求轉矩序列;進而以等效燃油消耗最小為目標,利用Dijkstra算法求解出最優控制序列[20];最后,選取最優控制序列第1個控制量,即當前發動機轉矩,計算對應的電機轉矩,作用于車輛模型。

圖2 基于MPC的PHEV能量管理策略流程圖
Dijkstra算法用于解決MPC中目標函數最優問題,其所得優化結果作為發動機轉矩,用于發動機與電機的轉矩分配,以減少PHEV綜合等效燃油消耗,達到提升能量經濟性的目的。
3.1 MPC的建立
3.1.1 預測模型
基于所規劃的經濟車速曲線,建立如式(10)所示的轉矩預測模型,得到每一步預測的需求轉矩,其中計算所需信息均可從ITS模擬器中獲取。
(10)
其中:Tprdt(t)為t時刻的預測轉矩,N·m;α(t)為t時刻的道路坡道角,rad;i0為主減速器傳動比;ηPT為傳動系效率。
3.1.2 目標函數
PHEV綜合油耗由燃油消耗和電能等效油耗組成,如式(11)所示:
(11)

根據能量流動關系:
(12)

3.1.3 最優控制問題建立
選取系統控制變量為發動機轉矩u(t)=[Teng(t)],系統狀態變量為x(t)=[SOC(t)]。當前時刻為t=k,以PHEV在預測時域Np內的綜合油耗作為MPC優化目標J。
(13)
發動機轉矩為控制變量:
(14)
約束條件為:
(15)
其中:Treq(k)、Teng(k)、Tmot(k)分別為k時刻總的需求轉矩、以及發動機和電機需求轉矩,N·m;neng(k)、nmot(k)分別為k時刻發動機和電機轉速,r/min;neng,max、nmot,max分別為發動機和電機最大轉速,r/min;Teng,max(neng)、Tmot,max(nmot)分別為發動機和電機在當前轉速下能夠提供的最大轉矩,N·m;SOCmax、SOCmin為SOC允許變化范圍。計算PHEV等效綜合百公里油耗時,1 kWh的電將等效為0.196 L的汽油[21]。
3.2 Dijkstra優化算法

利用Dijkstra算法對PHEV動力源轉矩進行優化分配,預測時域Np內的預測需求轉矩序列為:
(16)
圖3 Dijkstra算法求解優化目標示意圖
4 臺架試驗
4.1 經濟車速規劃仿真分析
信號燈路口通行測試場景參數如表3所示,假設車輛在d0時的到達時間t0= 5 s,分別采用基于規則的分段三角函數[11]、動態規劃以及高斯偽譜法進行PHEV經濟車速規劃,結果如圖4所示。

表3 信號燈路口通行測試場景參數

(a) 經濟車速曲線 (b) 等效油耗 (c) 目標函數代價
由圖4a可知:3種算法所規劃的經濟車速具有一定的相似性,均為加速至某一車速后,維持勻速直至通過信號燈路口。相比于基于規則的分段三角函數經濟車速規劃而言,在等效油耗方面(見圖4b),動態規劃算法和高斯偽譜法分別降低了6.31%和7.03%;在目標函數代價方面(見圖4c),分別降低了5.33%和6.40%,即2種優化算法均能有效提升車輛通行信號燈路口的經濟性和駕駛舒適性。總體來看,高斯偽譜法規劃的經濟車速曲線較為平滑,對車輛經濟性的提升在該場景下最好;動態規劃算法的優化效果略低,是因為求解時的狀態及時間離散點的選取對優化效果造成的影響。
4.2 能量管理策略仿真分析
基于真實道路地圖信息,利用高斯偽譜法構建市區信號燈路口工況,并將該工況作為PHEV仿真模型的輸入,對所提出的策略進行驗證。如圖5所示,選取同濟大學嘉定校區外某公共主干道路的一部分作為試驗場景,總長3.6 km,并提取沿途6個信號燈路口位置信息。
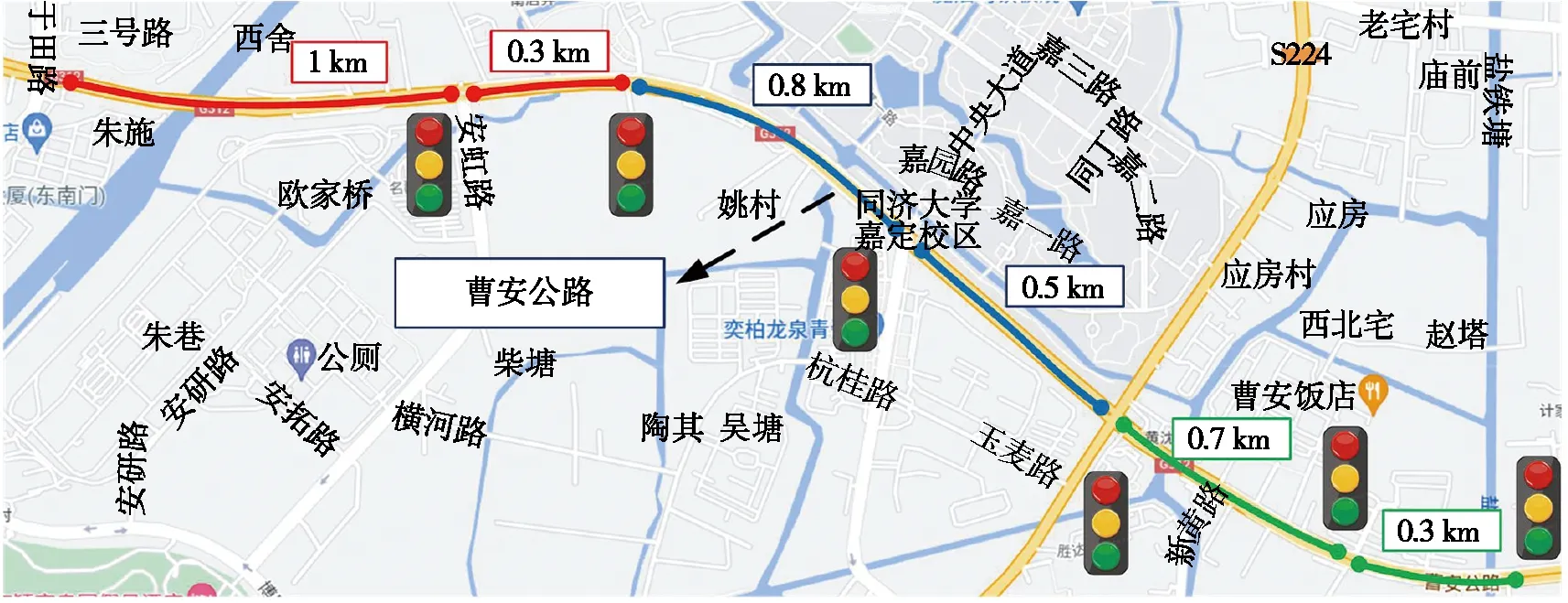
圖5 市區信號燈路口工況路線圖
根據上述市區連續信號燈路口工況,采用基于高斯偽譜法的經濟車速規劃算法。將上述6個信號燈路口分為3個路段分別進行經濟車速規劃,構造出市區連續信號燈路口經濟車速,如圖6所示。其涉及的信號燈通行場景包含加速-加速、減速-加速、加速-減速場景,涵蓋了日常駕駛中經常遇到的通行情況。車輛初始速度為ν0,行駛至每個路段第一個信號燈前d0距離時開始規劃連續2個路口通行的信號燈經濟車速。值得注意的是,當車輛行駛至經濟車速規劃范圍內時,算法會輸出連續通行2個路口的經濟車速,如圖6中第1路段72~107 s所示,當車輛順利行駛過信號燈路口后,會恢復到規劃之前的初始車速ν0。由于所提出的策略只涉及信號燈通行前經濟車速的規劃,且因順利通過路口后無時間等約束限制,所以不同的駕駛員在通過信號燈后會以不同的方式減速到初始車速ν0。因此,采用基于規則的分段三角函數算法規劃由通過路口至返回交通流速段的車輛速度,如圖6中107~120 s所示。
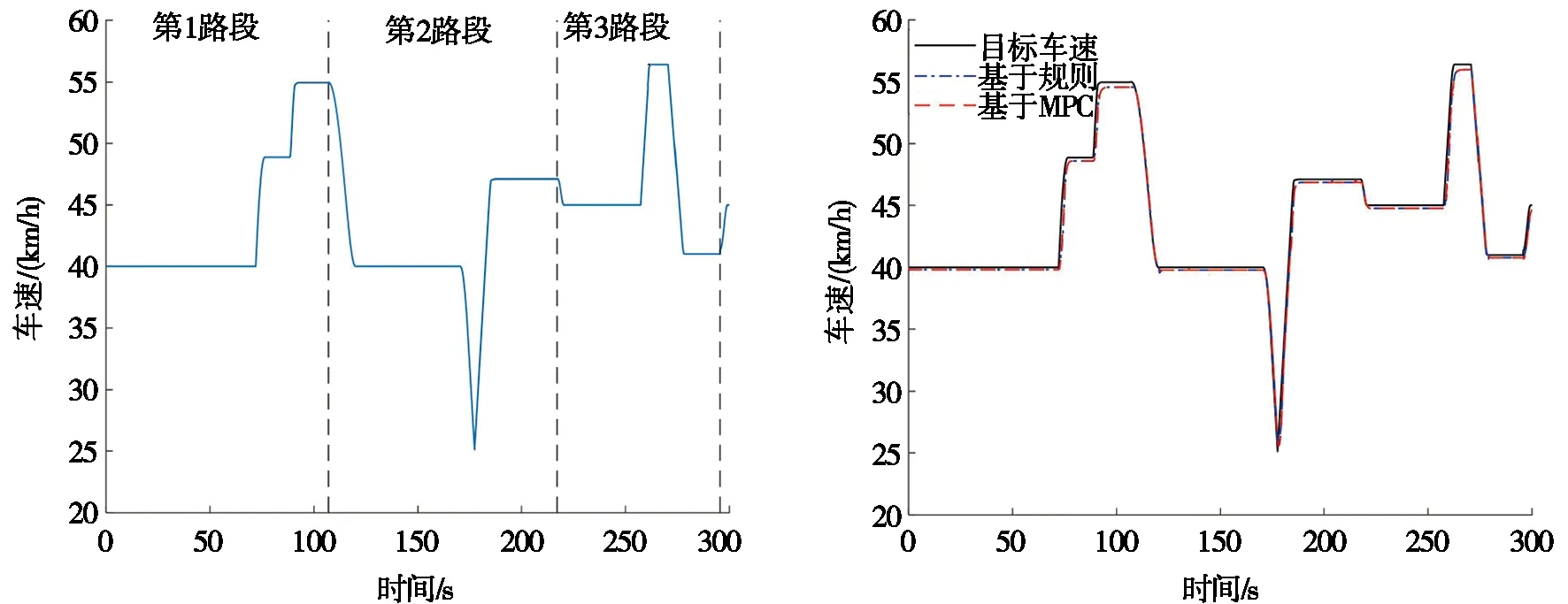
圖6 構造的市區連續信號燈路口經濟車速 圖7 PHEV行駛車速
采用上述構造的市區信號燈路口工況對PHEV能量管理策略進行驗證。使PHEV行駛在CS模式,設置初始SOC為30%,分別對PHEV基于規則的以及基于MPC優化的能量管理策略進行仿真驗證,行駛車速跟蹤結果如圖7所示,SOC終值、發動機油耗、綜合油耗如表4所示。
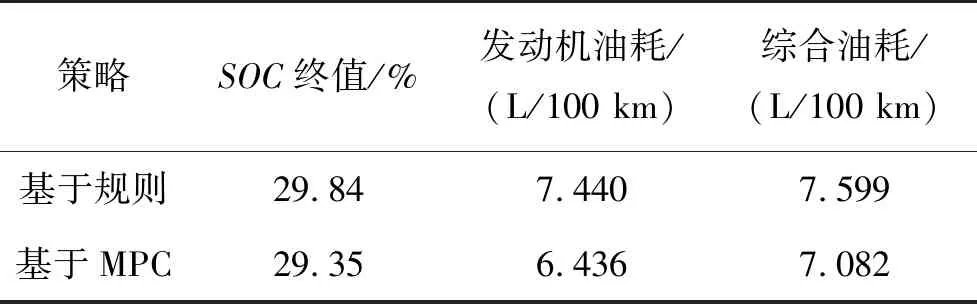
表4 市區連續信號燈路口工況下能耗結果
從圖7中可以看出:2種能量管理策略均能較好地跟蹤所規劃的經濟車速曲線。表4為2種能量管理策略在市區連續信號燈路口工況下的能耗結果,在基于規則的能量管理策略下,PHEV的綜合等效百公里油耗為7.599 L/100 km,SOC終值為29.84%;在基于MPC優化能量管理策略下的綜合油耗為7.082 L/100 km,SOC終值為29.35%。結果表明:SOC變化維持在初始值1%內,基于MPC優化控制策略的車輛能量經濟性相比基于規則能量管理策略的提升了6.80%。
4.3 臺架試驗驗證
4.3.1 駕駛員在環硬件仿真試驗平臺
將駕駛模擬器和PHEV動力總成對拖臺架集成,構建駕駛員在環硬件仿真試驗平臺,以驗證信號燈路口的經濟車速規劃算法以及MPC優化后能量管理策略。駕駛員在環硬件仿真試驗平臺如圖8。MicroAutoBox作為實時控制器,九州華海U2控制器作為臺架控制器,在Prescan仿真軟件中搭建市區道路及信號燈場景。MicroAutoBox的模擬數字轉換器(analog to digital converter,ADC)模塊接收到踏板的模擬量信號,將其轉換成數字量信號并根據駕駛員需求得到駕駛員需求轉矩。MicroAutoBox中的PHEV能量管理策略根據相關信號決策PHEV工作模式以及轉矩分配,并通過控制器局域網絡(controller area network,CAN)總線將工作模式、擋位決策以及目標轉矩等控制信號發送給臺架電子控制單元(electronic control unit, ECU)。臺架ECU對驅動電機、負載電機以及變速箱等動力部件進行控制,臺架反饋信號通過CAN總線發送給MicroAutoBox。Prescan接收到車輛的狀態信息,并集成到模擬駕駛場景中。駕駛員根據Prescan反饋的車輛真實車速以及目標車速曲線,操控踏板開度,形成閉環。
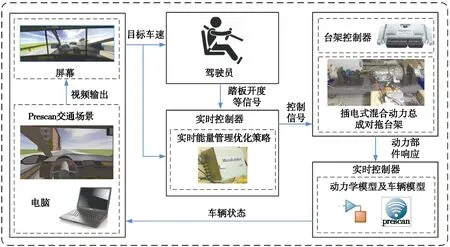
圖8 駕駛員在環硬件仿真試驗平臺
4.3.2 臺架試驗結果分析
在上述市區連續信號燈路口工況下,通過臺架試驗驗證基于高斯偽譜法的經濟車速規劃算法以及所提出的PHEV能量優化管理策略。與仿真設置相同,使PHEV行駛在CS模式,設置初始SOC為30%。駕駛員操作加速或減速踏板以跟蹤屏幕所示的目標車速,硬件在環仿真試驗結果如圖9~圖13所示。
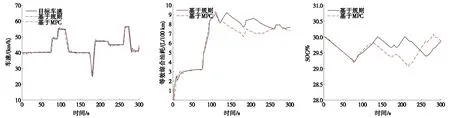
圖9 PHEV行駛車速 圖10 PHEV等效綜合能耗 圖11 蓄電池SOC
PHEV行駛車速如圖9所示,由于駕駛員真實地在操作踏板以跟蹤目標車速,所以存在車速跟蹤誤差及車速波動,車速均方根誤差分別為1.03 km/h(基于規則)、1.24 km/h(基于MPC),滿足跟蹤目標車速的要求。圖10、圖11分別為2種能量管理策略在市區聯系信號燈路口工況下的等效綜合油耗和蓄電池SOC變化曲線。通過圖10和圖11可得:PHEV采用基于規則的能量管理策略行駛完整個市區連續信號燈路口工況的綜合等效油耗為7.697 L/100 km,終止SOC值為29.87%;采用基于MPC優化控制策略所消耗的等效綜合油耗7.314 L/100 km,終止SOC值為29.75%。2種能量管理策略的SOC偏差控制在0.5%以內,基于MPC的PHEV優化管理策略相比于基于規則的能量管理策略提升了4.98%的能量經濟性。
采用2種能量管理策略的總需求轉矩、發動機轉矩以及電機轉矩如圖12和圖13所示,基于規則的能量管理策略發動機峰值轉矩為200.8 N·m,而基于MPC的能量管理策略發動機峰值轉矩為171 N·m。基于MPC的能量管理策略與基于規則的能量管理策略相比發動機峰值轉矩降低了14.84%,可以使發動機更多工作在高效區域,使得PHEV能量經濟性有所提升。
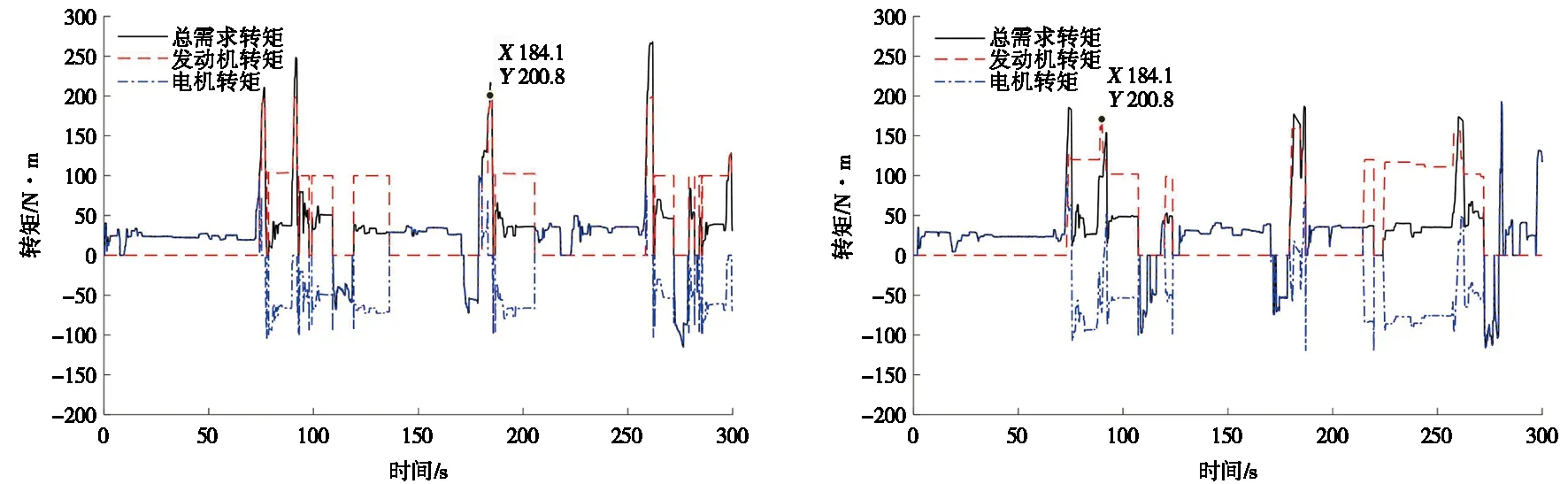
圖12 基于規則的能量管理策略 圖13 基于MPC的能量管理策略
在相同的策略下,與仿真試驗結果相比,駕駛員硬件在環臺架試驗的等效綜合百公里油耗分別相差1.29%(基于規則),3.28%(基于MPC),表明了所提出策略實際應用的有效性。此外,本文所提出的策略已實現在實時控制器中運行,也驗證了所提出策略的實時性。
5 結束語
(1)以P2構型的PHEV為研究對象,對信號燈路口進行場景分析,提出了基于DP和基于高斯偽譜法的經濟車速規劃方法。相比于基于規則的分段三角函數方法,2者分別可降低6.31%及7.03%的等效綜合油耗。
(2)將已規劃的經濟車速引入PHEV的能量管理策略中,采用Dijkstra最短路徑算法求解預測時域內的最優發動機轉矩序列。通過真實城市道路信息構建由6個信號燈路口組成的市區連續信號燈路口工況,并經過仿真和臺架試驗對所提出PHEV模型預測能量優化控制策略進行了驗證。相比于基于規則的PHEV控制策略,基于MPC的優化控制策略在上述工況下可提升4.98%的經濟性,證明了所提出的控制策略的有效性及應用潛力。
本文尚存在一些問題有待進一步研究與改進。一方面,信號燈路口經濟車速規劃時未考慮前方有車輛阻擋、車隊一起通行路口等情況;另一方面,由于資源的限制,臺架試驗時信號燈信息等由實時控制器當中的模擬交通模塊發出,未考慮信號解析以及通信延遲等情況。在后續研究中,可以基于V2X通信,利用地圖傳感器等采集道路及信號燈信息,并通過樣車在真實道路上進行試驗,對算法進行進一步驗證和完善。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41