基于改進滑模觀測器的永磁同步電機矢量控制研究
2023-01-18 07:15:40王寅趙磊曾潔
大連交通大學學報 2022年6期
王寅,趙磊,曾潔
(大連交通大學 電氣信息工程學院,遼寧 大連 116028)①
永磁同步電機(permanent magnet synchronous motor,PMSM)以其小體積、低噪聲、高功率因數等特點,在航空航天、電動汽車、機器人等領域廣泛應用[1-2].PMSM的閉環控制方式主要包括矢量控制和直接轉矩控制[3],這兩種閉環控制方式根據需求獲得電機的轉子運行速度以及轉子的位置角信息,但其通過另外安裝機械傳感器的方式,無疑會增加系統體積和成本,并且還會影響到整個系統的穩定性.因此,可以選擇采用無位置傳感器控制技術加以改進.無位置傳感器控制主要包括:磁鏈觀測器法、高頻注入法、模型參考自適應法、卡爾曼濾波器[4]、滑模觀測器等[5-6].Zhang等[7]對比了龍貝格觀測器、滑模觀測器和擴展卡爾曼濾波器在穩態精度、動態性能、參數魯棒性等方面的特性.在實用性方面龍貝格觀測器更好,但在魯棒性方面,滑模觀測器遠遠領先于另外兩種觀測器.因此,滑模觀測器以其對電機參數變化不敏感、魯棒性強、響應速度快等特點受到了國內外諸多學者的關注.Zhao等[8]提出了一種基于二階滑模超螺旋算法和MRAS估計理論的觀測器,相比傳統一階滑模觀測器,該方案減輕了抖振問題.楊淑英等[9]通過電流觀測誤差來設計滑模面并設計反饋矩陣,使電機的磁鏈誤差逐漸趨于零.馬文華等[10]結合間接矢量控制與固定邊界層滑模觀測器,設計了一種感應電機無速傳感器驅動控制方案,與傳統觀測器相比,其在低速工況下具有更高的精度.滑模觀測器的系統狀態點到達滑動模態后,由于系統慣性,會來回穿越滑模面,這會使系統產生抖振.本文在傳統的滑模觀測器的基礎上使用雙曲正切函數取代開關函數,并針對傳統的PI控制調節能力弱的問題,引入滑模控制,以進一步削弱系統抖振.最后通過Matlab/Simulink仿真驗證了改進后算法的優越性.
1 PMSM數學模型
以實際應用中常用的表貼式永磁同步電機為例,其在靜止α-β坐標系下的數學模型為:
(1)
(2)
式中:uα、uβ分別為電機定子電壓對應的α、β軸分量;iα、iβ分別為電機定子電流對應的α、β軸分量;p為微分符號;R為電機定子電阻;Ls為定子在d、q軸上的電感(Ld=Lq=Ls);Eα、Eβ分別為反電動勢對應的α、β軸分量;ψf為電機永磁體磁鏈;ωr為電機轉子的電角速度;θr為轉子位置角.
2 滑模觀測器的原理及改進方法
2.1 傳統滑模觀測器模型
將式(1)電壓方程變換為電流狀態方程:
(3)
定義滑模面為:
(4)

u(x)=ksign(s)
(5)
式中:k為滑模增益;符號函數sign(s)定義為:
(6)
結合式(3)~式(5)可將傳統的滑模觀測器構造為:
(7)
定子電流誤差可以用式(7)減去式(3)求得:
(8)

(9)
2.2 改進型滑模觀測器的設計
PMSM無位置傳感器控制系統的總體框圖,見圖1.
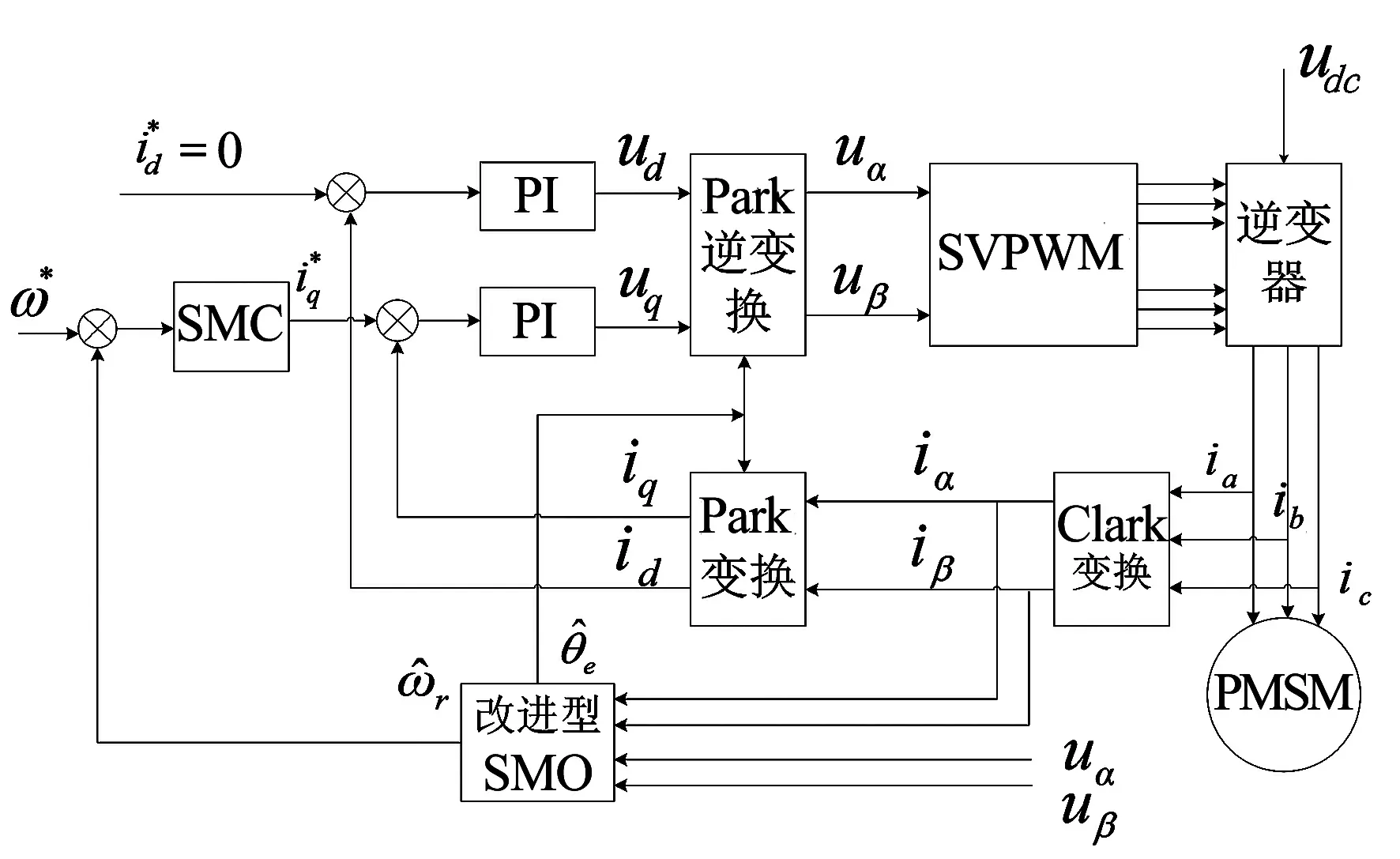
圖1 PMSM無位置傳感器控制系統的總體框圖

本文針對傳統滑模觀測器存在的抖振問題,在傳統滑模觀測器的基礎上做如下改進:選擇雙曲正切函數tanh (x)取代符號函數sign (x).定義雙曲正切函數如式(10),其波形見圖2.
(10)
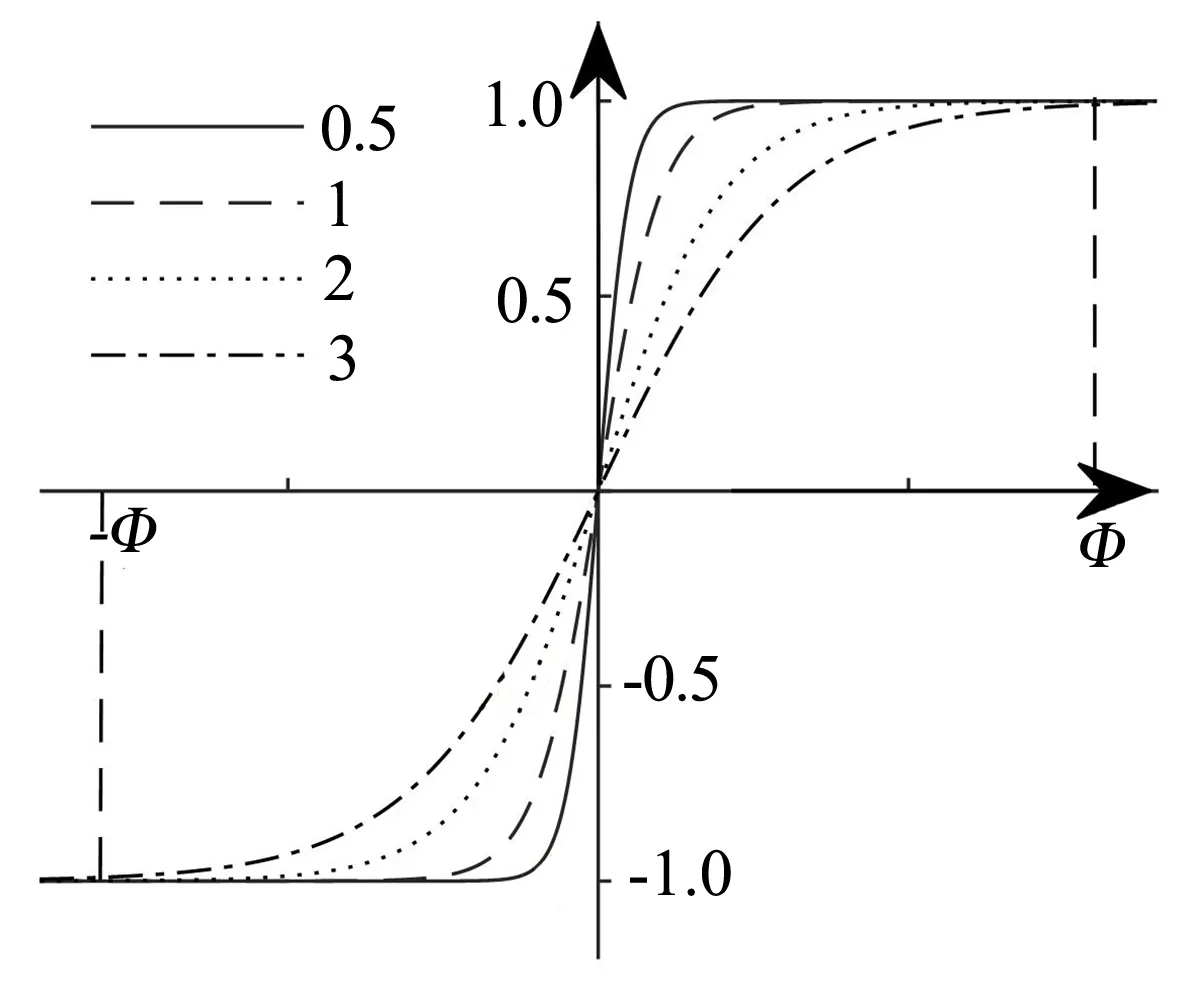
圖函數示意圖
因此,在傳統滑模觀測器的基礎上,本文采用指數型趨近律結合雙曲正切函數設計出如下趨近律:
(11)
式中:k>0,q>0,指數趨近律相較于等速趨近律,能夠大大縮短系統到達滑模面的時間,并且運動速度會隨著其與滑模面之間距離的縮短而逐漸減小,使得抖振更小.仍然選擇式(4)為滑模面,結合式(3)、式(4)、式(11)可以得到改進型滑模觀測器算法如下:
(12)
(13)
將式(12)、式(13)減去式(3)有:
(14)
(15)
定義Lyapunov函數:
(16)

(17)
(18)
即:
(19)
(20)
要滿足式(17)要求:
k>max{|Eα|,|Eβ|}
(21)
通過上述計算可知,當滑模增益滿足式(21)時,將會產生滑動模態,滑模觀測器穩定性條件能夠保證滑動模態在一定時間內收斂于零,即電流的觀測值能夠收斂于電流的實際值.
由于通過上述方法得到的Eα、Eβ是一個不連續的高頻切換信號,因此為了使其連續,需要在此基礎上使其通過一個低通濾波器,即:
(22)
則轉子位置角的估計值為:
(23)
但是由于低通濾波器的存在,反電動勢估計值會產生相位延遲,該延遲將不可避免地影響到轉子位置估計的準確性,為了獲得準確的轉子位置信息,需要在(23)計算出的轉子位置角的基礎上加上一個角度補償,補償后的角度如下:
(24)

對于常用的表貼式三相永磁同步電機,轉速估計值可以表示為:
(25)
綜上所述,ISMO的實現原理圖見圖3.

圖3 改進型滑模觀測器原理框圖
3 系統仿真
為了驗證改進型滑模觀測器所涉及算法的有效性,采用Matlab/Simulink軟件對其進行仿真測試.仿真實驗分別搭建了PI+SMO、SMC+SMO及SMC+ISMO的模型,并在相同條件下對系統常速、轉速階躍及突加負載時的運行情況進行對比.
PMSM主要參數如下:定子電阻為2.875 Ω;定子電感為0.008 5 Hm;轉子磁鏈為0.175 Wb;極對數為4; 轉動慣量為0.001 kg·m2; 額定電壓為311 V. 根據本文所提出的控制方式,仿真采用Fixed-step,ode3算法.仿真時長為0.1 s.電機空載啟動,初始轉速為700 r/min,電機運行至0.03 s時,轉速階躍至900 r/min,運行到0.065 s時加入2 N·m的負載.仿真波形見圖4.
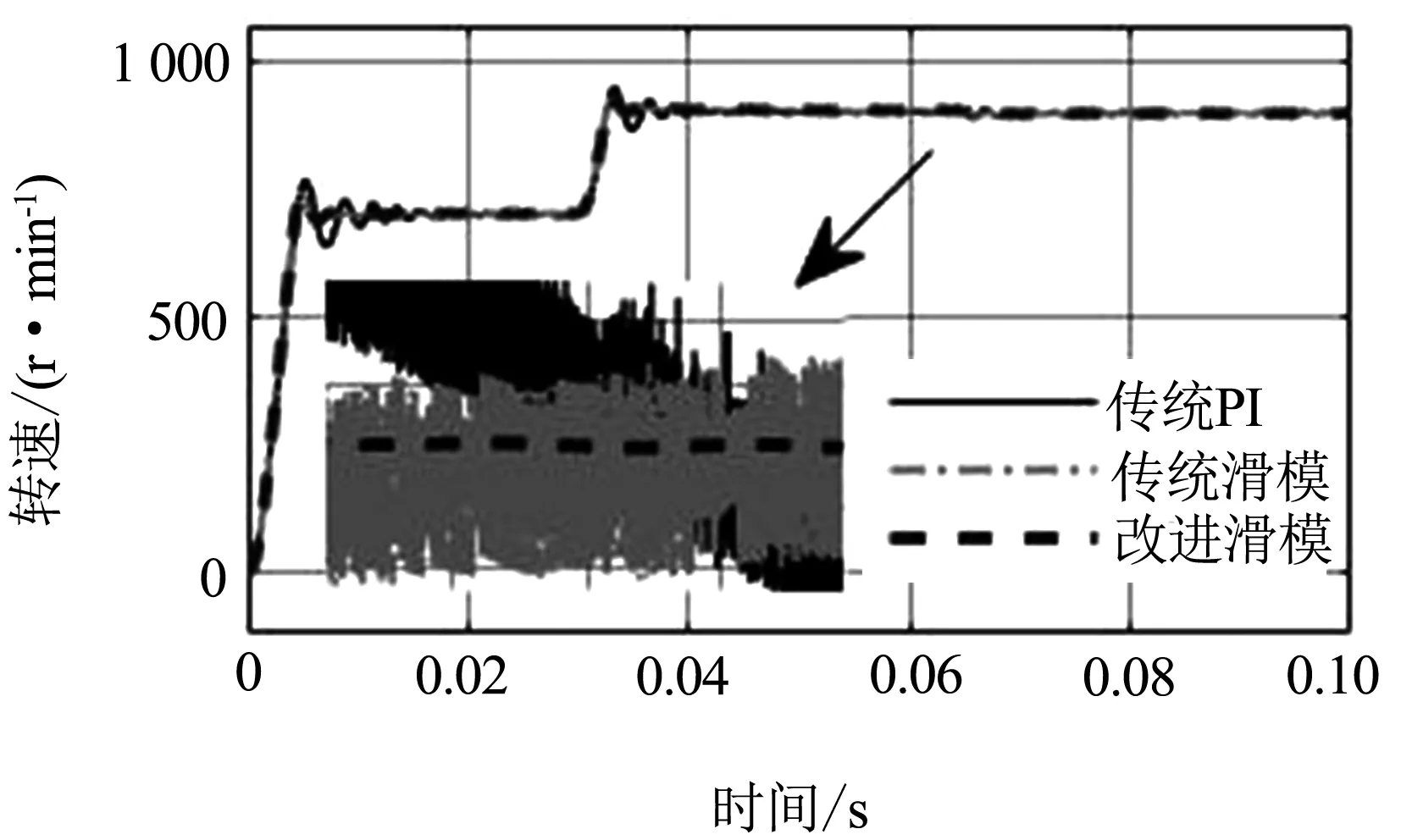
(a) 轉速變化波形
圖4分別顯示了在傳統PI控制下的傳統滑模觀測器、滑模控制下的傳統滑模觀測器及滑模控制下的改進型滑模觀測器的轉速變化波形與轉速誤差波形.可以看出,轉速的觀測值與實際值基本一致,傳統PI控制的傳統滑模觀測器在轉速700 r/min時,轉速誤差在±6 r/min左右;在0.03 s轉速躍變至900 r/min時以及在0.065 s加入負載時轉誤差動均為±5 r/min;采用滑模控制的傳統滑模觀測器在轉速700 r/min時,轉速誤差在±3 r/min,在0.03 s時轉速階躍至900 r/min時以及在0.065 s加入負載時轉速誤差均為±4 r/min;而滑模控制的改進型滑模觀測器全程轉速誤差都穩定在1 r/min.由此可見改進型SMO的轉速誤差遠小于傳統SMO,并且轉速變化能夠平滑地跟隨指令.
圖5為傳統SMO與ISMO轉子位置角估計值與實際值的仿真波形,可以看出,在兩種觀測器中,由低通濾波器引起的相位延遲即使在用反正切函數進行相位補償后依然存在, 關于相位 延 遲的改進方法可以通過鎖相環系統來提取轉子的位置信息[11].但是通過對比二者波形可以看出,改進型SMO在0.005 s即電機啟動階段能更好地跟蹤轉子實際位置信息.
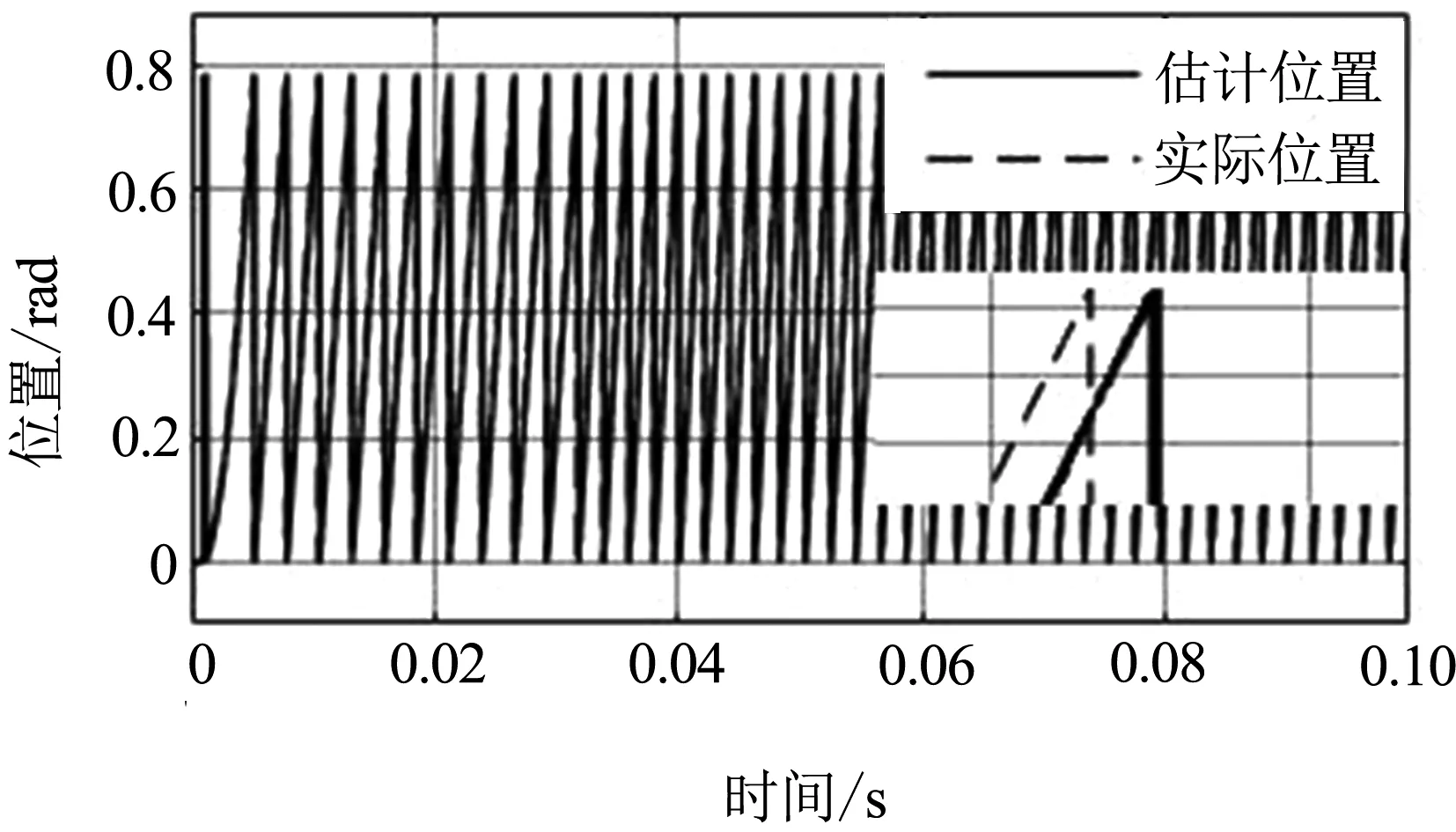
(a) 傳統滑模估計位置與實際位置
圖6為電機的轉矩輸出波形,在0.03 s轉速階躍至900 r/min以及在0.065 s加入2 N·m的負載時,傳統滑模觀測器以及改進型滑模觀測器的輸出轉矩均迅速爬升,并隨著轉速的收斂最終恢復穩定,但是對比兩者波形可以發現,改進型滑模觀測器的輸出轉矩變化更平穩,抖動要遠小于傳統滑模觀測器.
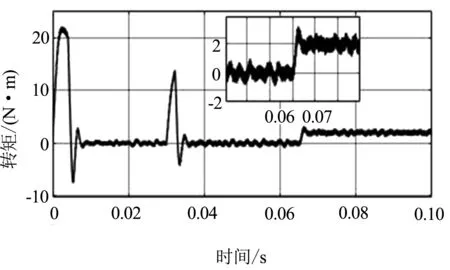
(a) 傳統滑模輸出轉矩
4 結論
本文以表貼式永磁同步電機為例,提出了一種改進的滑模觀測器.該ISMO采用雙曲正切函數tanhx取代傳統滑模觀測器中的符號函數signx.并針對傳統PI控制中,速度外環采用滑模控制的方式優化了控制效果.最后通過仿真對不同工況下采用傳統PI控制的滑模觀測器、滑模控制下的傳統滑模觀測器、 滑模控制下的改 進 型 滑 模 觀 測器進行對比分析.實驗結果表明:改進的滑模觀測器在估計轉速和轉子位置角方面具有較高的精度、更強的穩定性,能更好地抑制系統抖振.