農機深松作業智能監測系統車載終端設計
2023-01-22 13:31:40吳瑞聰
南方農機 2023年1期
吳瑞聰
(臨汾職業技術學院,山西 臨汾 041000)
實施農機作業智能化監控,為農機作業補貼政策的實施提供了強有力的技術支持,為各級政府提供了補貼和結算的定量資料,確保了政府對農機補貼的直接投入,提高了農業的整體生產能力。同時,也可以推動農機裝備行業的轉型升級,刺激農機智能監測設備企業研發生產更多智能化信息化設備,更好地服務于農業生產。通過對農機作業狀態、作業面積、作業質量的監測,極大地降低了農機作業調度和統計工作的難度,減輕了農機作業的管理壓力。
1 深松和秸稈還田的技術條件
玉米秸稈機械化收割后,將秸稈直接粉碎還田,碾壓深度為5 cm~10 cm,并在地面上均勻撒播。若收割玉米秸稈,應使用滅茬器在10 cm~12 cm深度的范圍內進行滅茬。
深翻深度為25 cm~30 cm,扣垡緊密,不留溝槽;翻土后,地面平整、破碎,10 m以內的高度偏差不大于10 cm,表面殘茬不大于10%。
深松的原則是要打破耕層,耕層厚度不得小于30 cm,每一行的深度偏差不得超過2 cm。在播種過程中,秸稈不拖沓、深淺均勻、不輕不漏,保證地表平整、土壤細碎,達到“上實下虛”的“待播狀態”[1]。
智能化監控技術的實現,需要將農機作業信息、衛星定位信息、作業狀態信息等,由農機作業智能監控終端進行分析;通過計算、分析作業質量,統計面積,儲存資料,精確監控機械作業狀況和作業面積。
2 農機深松作業智能監測系統車載終端的關鍵技術
2.1 物聯網技術
物聯網出現于20世紀90年代,迄今為止,經過約30年的發展,其已經成為現代信息技術的一個重要部分。物聯網是利用多種通信技術將不同的應用對象形成一個網絡,通過不同的應用對象進行信息交流,使其能夠在各種情況下進行不同的應用,從而實現智能識別與控制等功能。物聯網是以互聯網、對象信息采集、通信技術等為基礎發展起來的。通過物聯網技術,可以真正做到萬物互聯[2]。通過對物聯網的通信目標和過程的分析,可以歸納為信息感知、安全傳輸等特點。
傳感器技術是信息感知的重要組成部分,利用射頻識別技術、二維碼技術以及大量的智能感應器等實現多種形式的信息采集,再利用現代通信技術,對所采集的目標信息進行安全、可靠的傳輸[3]。通過與互聯網、無線網絡等通信網絡的結合,物聯網能夠準確、高速地傳輸所感知到的數據信息。智能化處理是利用大數據、云計算等多種智能技術對數據進行分析、處理,并給出智能分析的方法,從而實現智能監控。
在現實生活中,物聯網具有明顯的層次結構。一是位于最下層的數據感知層,它的主要功能是通過多種信息收集裝置對外部目標進行識別,并獲取目標的基本信息。二是位于中間的網絡傳輸層,它的主要任務是對數據感知層中的目標進行識別和收集,并通過通信網絡進行安全、有效地傳送[4]。三是物聯網應用決策層,其主要任務是對數據感知層中的信息進行及時的處理,對其進行科學的管理,并在必要時對其進行調用,以達到對目標對象的實時控制與智能管理。基于物聯網的特點,結合典型的系統結構,對深松作業進行了智能化監控。該系統通過感知層上的感測裝置,獲得農機深松作業的相關信息,然后由網絡層將采集到的資料安全、有效地傳送,最終在應用層進行作業區域的處理。
2.2 GPS導航技術
GNSS技術是一種利用GNSS衛星進行解算而獲得坐標系統中絕對定位坐標的一種技術,它能為使用者在地表或近地空間中的任意位置提供全天候的三維坐標和速度信息,導航系統的基本原理就是利用測距原理來確定方位點的坐標。在農機具上裝載車載終端進行深松作業的時候,人造衛星不斷地向農機具發射信號,每次發射都有一段發射時間[5],農用機械設備在收到信號后又會有一段接收時間。發射時間與接收時間的差值即為信號在發射時所耗費的時間,衛星在整個發射過程中的傳播速率為s,利用兩個時差與衛星信號的傳播速率之積來確定農機與衛星的距離。假定農田上的農業機械的坐標是(x,y,z),理論上,只需要三個衛星組成3個方程式,就可以得到3個坐標,但由于信號在實際傳輸的時候會通過電離層造成延遲,所以實際的距離要小于光速與時差的乘積。因此,在進行農業機械的空間坐標計算時,必須考慮到“鐘差”。因此,需要四顆衛星,才能得到真正的衛星位置。這是一種常見的定位方法,即偽距離定位。假定在農機作業中,4個衛星的空間坐標是(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4),四顆衛星與農機的間距分別用a、b、c、d來表示。因此,可以用以下方式來表達偽距位置方程式:
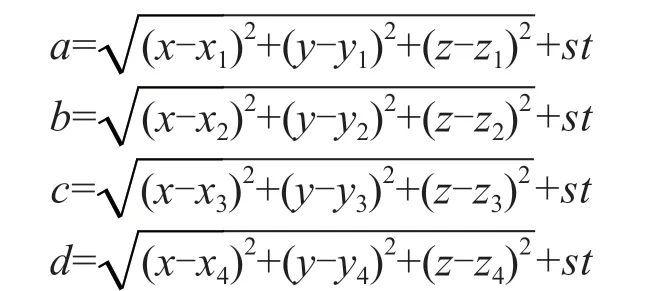
上面的公式中a、b、c、d是被測得的偽距離,t是在傳輸過程中的時間差,四個衛星的位置都是已知的,通過解此方程,即可得到農業機械的三維空間坐標。
全球主要的導航與定位系統是北斗BDS、美國GPS、俄羅斯 GLONASS、歐盟 GALILEO等。GPS(Global Positioning System)是目前應用最廣的一種,GPS使用24個網絡衛星和4個備用衛星,它的覆蓋范圍達到98%,能夠為全世界的使用者提供24 h的準確地理位置、行駛速度和準確的時間信息[6]。北斗導航系統是我國自主研制的一種導航系統,北斗三號衛星導航系統于2020年正式投入使用,標志著我國北斗系統的全面成熟,其定位精度也得到了極大地提高,在與基站的差動定位中實現了毫米級的精確定位[7]。由于北斗導航已在國內及周圍區域廣泛應用,農業深松作業監控系統采用了GPS和北斗兩種模式的定位模塊。
2.3 無線通信技術
無線通信是一種利用電磁信號在自由空間中的傳播特征來實現信息交流的方法,它以其獨特的優勢在各行各業中得到了廣泛的應用,該通信技術不依賴于工業環境,無需現場布線,具有很高的靈活性。按照距離的不同,可以將其分成兩種類型,其中最常用的是ZigBee、Bluetooth、Wi-Fi、UWB(NFC)等。由于該監控系統是在農田進行農業生產,必須將資料上傳至服務器,因此必須使用遠程無線技術。
長距離的無線通信方式也是五花八門,比較常用的有數傳電臺、GPRS等。本文從傳輸距離、傳輸安全性、應用領域等幾個方面對傳輸技術進行了分析,并對其傳輸技術進行了研究。最后,從通信距離、通信方式、數據傳輸安全性、模塊費用等幾個方面綜合考慮,采用GPRS無線傳輸技術。GPRS(GSM)是中國移動公司在GSM網絡上運行的一項技術,這種方法是通過分組交換來實現的,即把要傳輸的數據分成若干個單獨的分組,將包裹編號的資料包,按照之前的順序,依次傳送。本文之所以選擇 GPRS技術,主要理由如下:
1)覆蓋范圍廣泛。近年來,由于手機網絡的迅速發展,幾乎覆蓋了國內大部分地區,任何手機信號都能連接到手機上。
2)即時聯機。GPRS網絡啟動后,所有的服務都將繼續運行。由于不占用通道, GPRS會在缺省狀態下永遠處于聯機狀態,不會占用任何路由。
3)按數量計價。GPRS網絡是按收發的字節數收費,只有在有數據交互的情況下,才會占用帶寬,有效地提高了網絡的使用效率。
4)傳送速率。GPRS采用GSM通信,采用包交換技術,使GPRS的傳輸速率比GSM快。最大的傳輸速度是171.2 Kb/s。實際使用時,通常為56 Kb/s~1 142 Kb/s,能很好地滿足系統的設計要求。
3 系統整體結構
在對該系統功能要求進行分析的基礎上,將物聯網技術和無線通信技術相結合,給出了能在惡劣工作條件下進行農業機械深松作業監控系統的總體設計方案,并給出了各模塊的主要功能。該系統由三大模塊組成:服務器、車載終端和監控終端[8]。服務器、車載終端和監控終端的主要功能如下。
3.1 服務器
服務器的功能是對多臺作業車終端進行統一的管理,將終端的數據傳輸到PC和手機上。在監控系統中,服務器是應用層,僅需與車載終端通信即可。結合深松作業流程,服務器的主要工作是對車載終端進行角度和非工作角度、圖像采集等指令的發布。同時,當服務器接收到了來自車載終端的工作軌道坐標信息后,需要進行數據運算,并將其發送給終端,并通過車載終端將獲取的現場圖像數據進行解壓,從而實現實時顯示。
3.2 車載終端
作為整個系統的中樞,車載終端的功能是采集、存儲和上傳農業機械設備的數據,同時實現了服務器、車載終端和監測終端的數據交互。車載終端首先對農用機械的經緯數據進行初步的坐標解析和時間解析。其次,將監控終端采集到的數據進行集成和封裝,并以特定的格式進行備份。最終,將所封裝的資料以無線方式傳送至伺服器。
3.3 監控終端
監控終端由角度信息采集、圖像采集和身份識別三部分組成。角度信息采集模塊主要是對農機作業狀況的判定和對耕地深度的測定;圖像信息采集模塊是對牽引車和耕作狀態進行實時監控,能夠拍攝到拖拉機深松的全過程;該系統的功能是將各種犁體的基本資料和工作角度等信息進行存儲。
通過服務器、車載終端和監控終端的數據交互,可以實時地獲取和監控農機深松作業中的作業信息,并通過故障自診斷、斷點續發等措施,有效地防止了無效率操作。定位監測系統的整體結構,如圖1所示。

圖1 定位監測系統的整體結構
4 小結
本文在農業智能化農業云平臺的基礎上,首先,對深松作業監控系統的功能進行了調查;其次,對其功能要求進行了分析,并結合物聯網、GPS、無線通信等關鍵技術進行了深入探討;最后,根據農機深松作業過程中的工作流程,給出了一套智能化的農機深松監控系統,為智能農機的發展貢獻了一份力量。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
中外會展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56