基于ZigBee無線通信的智能停車誘導系統設計研究
2023-01-31 01:47:04劉遠仲張強楊嘉李和霖邱拓
電子制作 2023年1期
關鍵詞:系統
劉遠仲,張強,楊嘉,李和霖,邱拓
(南充職業技術學院,四川南充,637131)
0 引言
近年來,隨著國家經濟繁榮發展,擁有私家車已成為民眾一件很普通的事,這也使得城市汽車保有量大幅提升。開車出門雖然方便了人們的出行,但在城市停車難卻一直是讓車主們頭痛的事,盡管很多城市建立了一定數量的停車場,但仍然不夠用。究其原因分析可發現有以下幾個主要原因,一是大部分停車場處于人工管理狀態,管理效率低;二是車主想停車時不清楚該停車場是否還有空余車位,車位使用率低;三是車主進入停車場停車時全憑自己感覺找車位,停車耗費時間長、效率低,所以設計一個停車誘導系統來提升停車場管理效率,減少停車耗費時間,滿足車主們快捷、舒適停車,十分有必要。本文結合ZigBee無線通信技術優勢,研究設計了一個智能停車誘導系統用于停車場高效、智能化的管理。
1 系統總體設計
智能停車誘導系統以ZigBee無線通信技術為基礎組建通信網,以嵌入式芯片STM32F407為控制核心來處理各采集器的終端數據信息。系統主要由停車場車位信息發布、車輛數據采集,終端無線信號傳輸與處理、停車誘導等幾部分構成,停車誘導系統組成框圖如圖1所示。工作原理:當停車場有空余車位時將通過信息公告牌向外發布信息,車主進入停車場入口,數據采集系統采集車輛信息并做好記錄,采集到的數據通過ZigBee節點傳輸到嵌入式系統進行信號分析、處理,最后由上位機軟件調動監控顯示功能發送停車誘導信息至顯示屏,并以距離最短、停車最方便的方式引導車主完成停車。
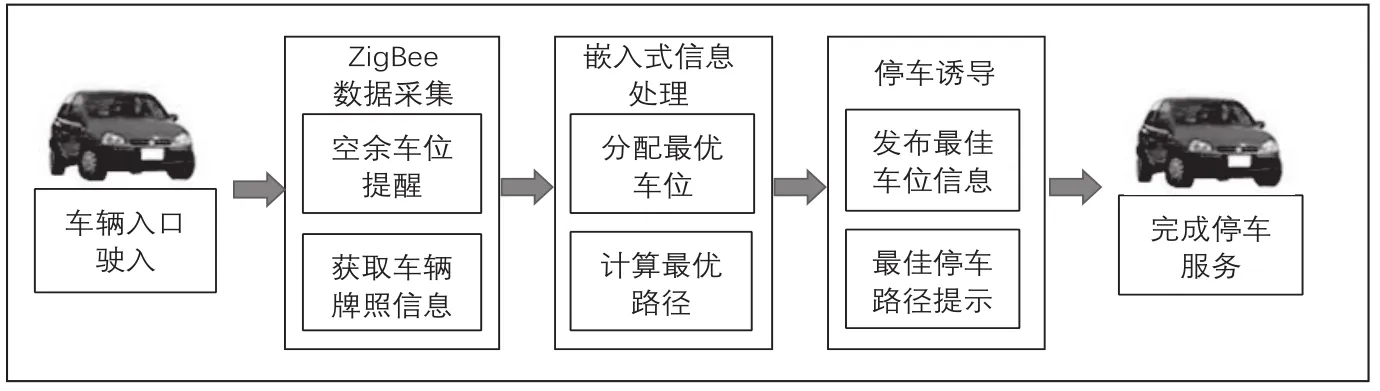
圖1 智能停車誘導系統組成框圖
2 系統硬件設計
■2.1 ZigBee組網技術
ZigBee無線通信技術以IEEE802 15 4協議棧為標準,使用頻段為2 4GHz,數據傳輸速率約250Kbps,有效組網距離為100~2000米,且支持點對點、星型、鏈狀以及網狀等多種組網形式,它具有成本低、功耗低、多節點和網絡性能穩定等特征。ZigBee無線通信網絡組建包含的主要設備有路由器,協調器和多個終端設備,建網過程可分為,一是以協調器為中心建立無線通信網絡,二是節點申請加入控制網絡進行通信。系統上電后,其中的網絡協調器會選擇一個最優通信信道建立網絡標識PAN ID,成立通信網絡,并允許終端節點設備入網,當節點申請加入通信網時可通過兩種方式入網,一是直接通過協調器加入網絡,二是通過父節點入網。當節點首先掃描周圍的ZigBee網絡,找到網絡協調器或父節點后向其發送入網請求,如果被批準網絡將為其分配一個16位網絡短地址代表入網成功,此后數據將通過此通道進行數據傳輸通信。ZigBee網絡結構類型主要有星型,樹族型,網狀型,本系統考慮到停車場低功耗的需要,采用樹族型網絡結構,樹族型網絡布局結構圖如圖2所示。布點時為防止父節點傳輸數據壓力過大,我們以黑點為中心作為無線區域接收數據裝置,然后選擇合適位置布置中繼路由器延長信號的傳輸距離,為了提升網絡抗干擾能力,節點布置時單個路由子節點數量控制在16個以內。

圖2 ZigBee組網拓撲結構
■2.2 車位定位數據采集設計
電路設計中數據采集系統使用芯片CC2431作為ZigBee通信網絡采集數據的核心。CC2431是一個具有低功耗、高速數據收發處理、內核為增強型8051的微控制芯片,它可以實現非常低的材料成本建立強大的ZigBee網絡節點,系統采用RSSI(Received Signal Strength Indication)技術來檢測與定位空余車位位置,當ZigBee完成組網后,通過計算節點RSSI均值來確認車位所在確定位置,完成空余車位精準定位,進行最佳路徑提示規劃。無線網絡芯片的外部接口主要包含接收串行數據接口RXD,發送串行數據接口TXD,復位信號RST,主機輸出從機輸入接口MOSI與主機輸入從機輸出接口MISO,組和序列CSN等主要接口。終端節點與主機通信采用標準的I2C總線協議和串口通訊技術將采集到的數據發送到主微控制器。CC2431的ZigBee無線網絡系統電路設計圖如圖3所示。
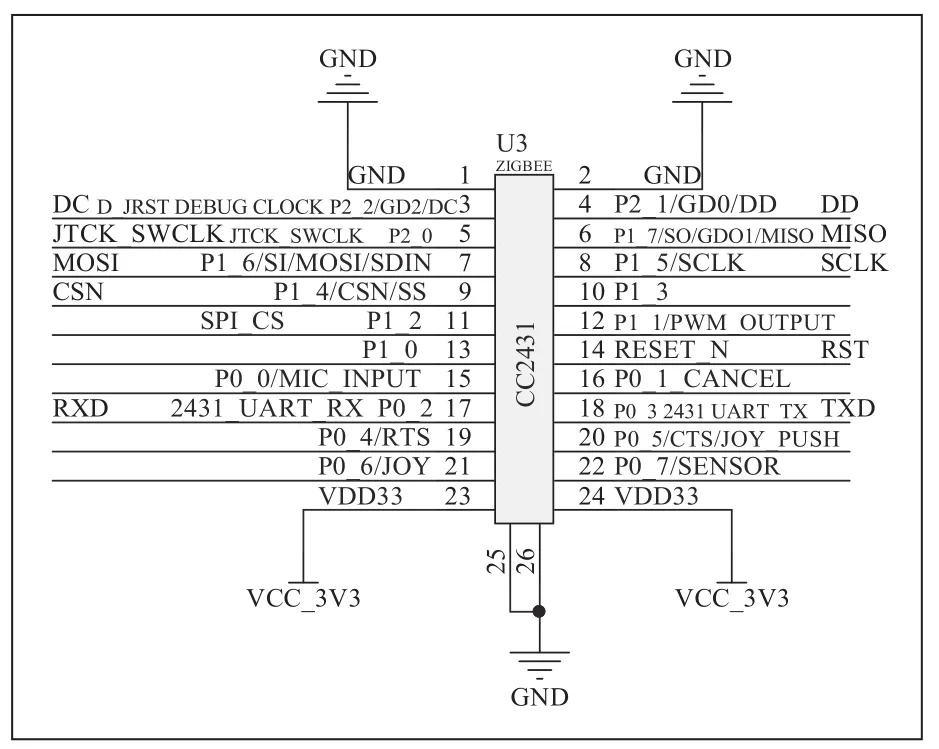
圖3 ZigBee無線網絡節點原理圖
■2.3 STM32信號處理設計
在物聯網控制系統中,信息處理技術是整個ZigBee無線通信網絡系統中最為關鍵的技術。STM32F407是一款性價比高、資料豐富、功能強大的嵌入式信號處理芯片,因此本系統采用STM32F407作為信息處理的核心,它在系統中承擔了系統感知層的大腦,工作原理可簡述為,主控芯片首先把各個節點感知到的數據搜集起來統一分析,然后向各個節點或相關設備發送數據,最后讓每個終端部分按規定要求動作。實際運行時,STM32F407將ZigBee節點采集到車輛牌照與空余車位等信息收集處理分析,然后向顯示屏發出剩余車位信息和最佳停車路徑顯示,完成引導車主快捷、方便停車。STM32F407工作時的外圍電路設計,主要包含有芯片測試JTAG接口設計,復位電路設計,時鐘芯片設計,FLASH閃存結構設計,電源電路設計,晶振設計等。系統主控芯片電路設計圖如圖4所示。
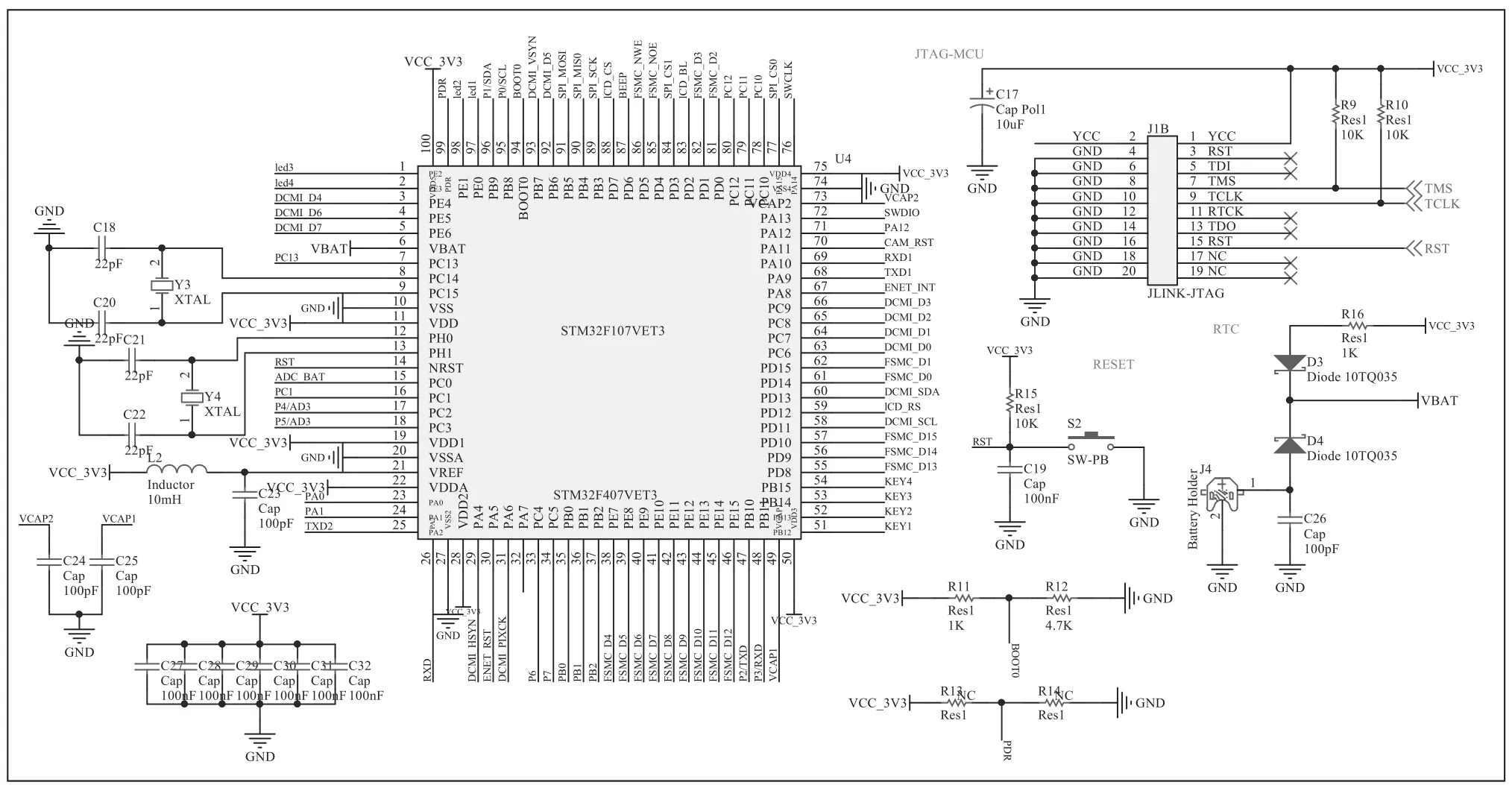
圖4 系統主控芯片電路設計
3 系統軟件設計
停車誘導系統的軟件設計部分主要包含了下位機軟件設計和上位機軟件設計。下位機軟件設計主要實現無線傳感網絡數據的收發,完成終端節點數據的采集與轉換;上位機軟件設計主要服務于嵌入式信號處理,完成遠程節點傳送過來的數據計算分析和處理,通過顯示屏提示車主高效、快捷停車,完成停車誘導功能。
■3.1 下位機軟件設計
本系統下位機軟件設計流程如圖5所示。
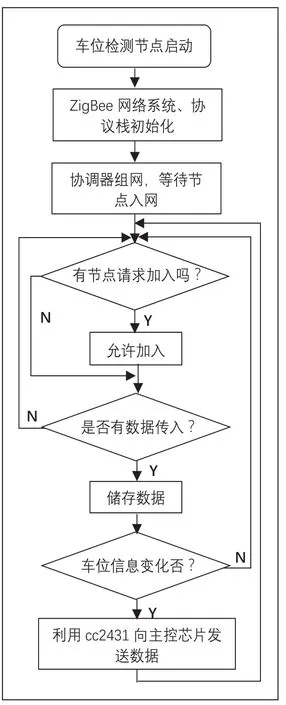
圖5 ZigBee無線網絡車位信息檢測流程圖
下位機軟件工作流程為,首先啟動停車場的車位檢測點ZigBee終端設備,終端設備上電后初始化協議棧,為組建無線通信網絡做好準備,協調器組建ZigBee網絡,等待各終端節點加入,協調器判斷是否有節點加入,當有節點加入時則允許終端節點加入并分配PAN ID通道,當沒有時則判斷是否有數據傳入,節點加入后隨即檢查是否與數據傳入,當有數據傳入時便通過數據庫系統儲存每個節點位的數據,建立好停車場車位詳細信息數據庫系統,如果沒有數據則返回到節點請求加入處繼續監測節點數據的加入,循環監測停車場車位數據的變化,當有車位已停車或不能使用時終端則發送新信息到協調器及時更新數據系統。
■3.2 無線通信數據格式
當ZigBee終端需要向主機發送信息必須設定好數據通信編碼格式。停車場終端向數據返回數據為了保持準確,數據通信傳輸碼格式為,數據首先發送引導碼,確認是哪個終端在發送數據,然后傳送字符的類型,說明是字符型還是整型類別,繼續發送數據長度標識表明數據長度為8/10/12bit,接著發送車位標識表明是哪個車位的詳細信息,繼續發送車位目前的狀態,在這里我們將車位的狀態主要歸納為5個類別,1表示車位已停車,2表示車位空置,3表示終端電量低,4表示終端已掉線,5表示設備出現故障需檢查。緊接著發送的是我們數據的校驗位與結束標志。無線數據通信編碼格式如表1所示。

表1 無線網絡通信數據編碼格式
■3.3 上位機軟件設計
上位機軟件處理中心為具有跟蹤監控服務的計算機,采用具有強大的數據處理與存儲的SQL2012軟件,開發語言使用VC++6 0開發,上位機軟件開發主要圍繞數據庫處理模塊,無線通信模塊,顯示誘導功能模塊來編寫主控程序,網絡通信采用標準的RS232接口連接主機。軟件工作流程為,數據中心儲存好停車場所有車位信息數據,建立好數據庫,當有車主進入車場需要使用車位時,主控芯片將接收到車位ZigBee節點發送過來的詳細信息,進行計算分析處理后送LED顯示中心提示車主車位信息、最佳停車路徑等信息,完成誘導停車。
4 結束語
系統采用基于ZigBee的無線通信方式管理停車場,克服了有線通信方式需要布線,安裝復雜等缺陷,大大提升了停車場管理的環境適應性。隨著現在智能手機的普及,系統還可以通過直接開發的智能停車APP軟件導入停車場相關數據,方便了人們對停車場的遠程監控、操作和管理。當城市交通系統需要采集車位或車輛信息時也可通過socket接口下載或上傳數據到數據庫查找信息,對城市發展智能交通也具有十分重要的參考意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
