基于分數階PIλ的STATCOM控制策略仿真研究
2023-01-31 01:47:14唐東成楊業鴻何磊
電子制作 2023年1期
關鍵詞:設計
唐東成,楊業鴻,何磊
(1.懷化職業技術學院電子電氣工程系,湖南懷化,418000;2.中國鐵路廣州局集團有限公司懷化供電段,湖南懷化,418000;3.湖南國防工業職業技術學院武器裝備維修學院,湖南湘潭,411200)
0 前言
目前STATCOM等裝置廣泛用于電力系統無功補償,實現對電網電壓的調控。電網電壓的穩定性控制是電力系統穩定的重要組成部分。需要無功補償裝置能快速響應為電力系統提供足夠的無功功率,保證發出的無功功率與消耗的無功功率保持平衡。
由于STATCOM裝置在dq坐標系下的數學模型具有非線性、強耦合的特點[1],控制器設計比線性系統控制器設計困難。文獻[2]提出坐標變換的基本思路簡化STATCOM控制系統模型,直流電壓外環,電流內環的控制策略,并設計PI控制器。文獻[3-5]將分數階PID控制器應用到STATCOM裝置控制系統,但分數階PID參數整定較困難。目前參數整定的方法主要有遺傳算法[3],遺傳粒子群優化[4],模糊算法[5],頻域設計法[6-7]等。
本文首先分析并建立了STATCOM裝置的數學模型,采用坐標變換的方法將電流分解到電壓矢量方向和與之垂直的方向,便可對無功電流分量與有功電流分量進行解耦控制,并設計分數階PI控制器。采用頻率響應設計方法,整定控制器參數。最后對系統進行了仿真研究,驗證了控制系統的可行性。
1 STATCOM數學模型
STATCOM裝置的電路拓撲結構由全控型器件組成的三相橋式逆變器。其主電路結構如圖1所示。

圖1 STATCOM主電路結構
STATCOM裝置中主要參數有交流側等效電抗L;直流側電容器為C和電力電子器件與電抗器的等效電阻R。由于STATCOM三相坐標系下的數學模型復雜、變量多,不便控制系統設計。因此,通過坐標變換將三相坐標系的數學模型等效成dq坐標系,簡化了數學模型。


圖2 d-q 坐標圖
公式(1)中,uld、ulq為電網側d、q軸電壓;id、iq為STATCOM裝置交流側d、q軸電流;電源角頻率為ω;在旋轉dq坐標系中,假設電壓為正弦波形,電壓矢量分解到d軸和q軸后,電壓分量為直流量;同理,在同一旋轉坐標系下電流矢量的分解量也為直流;如果將電壓、電流矢量分解到d′-q′坐標系下,并保證d′軸方向與電網側電壓空間電壓矢量Ul方向相同。即令ud′=Ul,uq′=0。其中得到新的旋轉坐標系d′ ?q′坐標系,于是通過坐標變換,將原d?q坐標系變換到d′ ?q′坐標系上,變換矩陣為其中θ=arctan (uqud)為兩個坐標系的夾角;令則原系統模型經坐標變換后變為[2]:

在上述數學模型中,使得控制策略更容易實現。
2 分數階PIλ控制器設計
由Podlubny教授提出的分數階PIλDμ控制器,比整數階PID控制器增加了兩個可調參數λ,μ,分別為積分器與微分器的階次。分數階PID控制器的階次可以在0<λ,μ<2范圍內相對任意地選擇。因此,分數階PIλDμ控制器的形式更靈活,控制效果可能會更好。
典型分數階PIλDμ控制器的數學形式為:

與整數階PI相比,除了比例、積分系數外,分數階PIλ控制器還可以對階次λ進行設計。其數學形式為:

本文采用直流電壓外環控制,使逆變器直流側電容電壓穩定,并利用電壓偏差經分數階PIλ控制輸出作為電流內環的給定值id′_ref。為了補償負載消耗無功功率,采用無功功率電流跟蹤控制,即直接檢測負荷側無功電流作為給定值iq′_ref與STATCOM實際輸出無功電流i′q的偏差經PIλ控制器輸出。控制系統框圖如圖3所示[2]。

圖3 STATCOM控制系統結構框圖
考慮變換器的輸出延時,忽略反饋通道時間延時;可得到電流內環等效控制框圖如圖4所示。其中KPWM為變流器等效增益;T為變流器開關周期的1/2[4]。

圖4 電流內環控制框圖
為控制直流側電壓,設計了電壓外環控制器;可得電壓外環等效控制框圖,如圖5所示。其中Gi(s)為電流內環閉環傳遞函數;K為時變環節的最大比例增益;Te為電壓采樣小慣性時間常數。
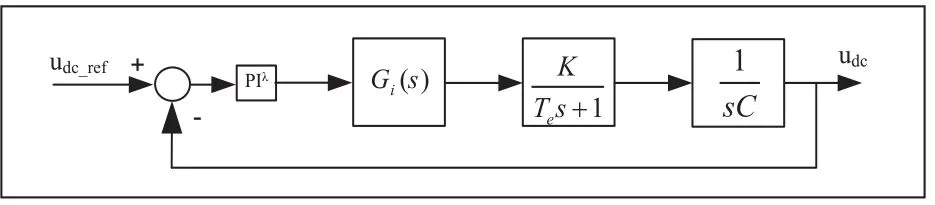
圖5 電壓外環控制框圖
本文采用基于頻率響應的設計方法,給定系統相角裕度φm和截止頻率ωc,可以得到以下分數階PIλ控制器參數的整定規則[6-7]:
(1)控制系統開環傳遞函數截止頻率ωc處相角特性為:

(2)控制系統開環傳遞函數截止頻率ωc處幅值特性為:

(3)控制系統魯棒性條件,當系統增益分別增加或減少20%時Bode圖中相位對頻率的導數在截止頻率ωc處為0,系統響應超調量基本不變,具有很好的魯棒性。即系統開環傳遞還需滿足以下關系式:

■2.1 電流環控制器參數設計
由圖4所示,電流環開環系統模型為:

其中,截止頻率ωc=10rad/s,相角裕度φm=50°;KPWM=380,T=5×10-5s,Lm=0 003H,Rm=0 5Ω;采用頻率響應設計方法,可以得到電流環控制器參數KPi=0 011,Kii=0 59,λi=1 47。
■2.2 電壓外環控制器參數設計
其中,截止頻率ωc=10rad/s,相角裕度φm=70°;K=0 75,Te=2×10-6s,C=0 04F;采用頻率響應設計方法,可以得到電壓環控制器參數KPV=0 33,KiV=0 59,λV=0 72。
3 仿真研究
為驗證STATCOM控制系統性能特性。利用MATLAB仿真軟件建立了含STATCOM裝置的單機無窮大系統模型,仿真參數設置如下為:
電網線電壓有效值為380V,頻率為50Hz,STATCOM裝置開關器件的開關頻率為10kHz,STATCOM裝置交流側等效總電阻Rm= 0.5?,連接電抗Lm=3mH,直流側電容值為C= 4000μF;直流側電壓給定值為800V,無功電流給定值為iq′_ref。假設負載消耗有功功率Pload= 1 0kW,消耗無功功率Qload=8kVar。

圖6

圖7
仿真結果如圖8所示,在0-0 1s時,電力系統沒有接入STATCOM無功補償裝置,此時負荷消耗的無功功率全部由電網提供。當0 1s接入該裝置后,無功功率由STATCOM裝置為負荷提供,減少電網無功電流的輸出,因此補償后電網的負荷電流低于補償前電流。未接入STATCOM時,輸電線路電壓Ula超前線路電流ila約38 7°,輸電線路的功率因數為0 78。接入STATCOM裝置后,輸電線路的功率因數接近1;輸電線路電壓Ula與線路電流ila趨于同相。

圖8 接入STATCOM裝置前后電網電壓電流波形
在接入STATCOM裝置前后采用PI控制器、分數階控制器PIλ均能使無功功率發生裝置在較短的時間作出響應。但使用分數階PIλ控制器可使無功功率響應過程更加平滑。通過仿真驗證了分數階PIλ控制器可行性,在性能上優于傳統PI控制器。
4 結論
本文建立了STATCOM系統控制模型,該模型具有強耦合、非線性特點。對此本文采用電壓矢量定向方法,通過坐標變換實現有功電流和無功電流分量。采用頻率響應設計一般方法,對分數階PIλ參數進行整定。仿真結果表明,采用分數階PIλ控制器在保證響應速度的同時,還能較少負荷沖擊帶來的影響。能快速平穩地維持電網電壓。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
