基于機器視覺的鏈輪內徑測量系統
2023-01-31 01:47:06葛敏杰嚴時進戴家興董晨浩張瞳
電子制作 2023年1期
葛敏杰,嚴時進,戴家興,董晨浩,張瞳
(紹興文理學院 機械與電氣工程學院,浙江紹興,312000)
0 前言
隨著現代化生產的高速發展,中國精密測試儀器行業實力已不容小覷,已經初步建立了產品類別較為完整、具備相當制造規模與研發能力的工業系統[1]。而鏈輪作為機械設備的重要組成部分,是一種工業必需品,廣泛應用于化工、紡織等行業的機械傳動裝置。鏈輪的精度是影響一些工業產品好壞的決定性因素。所以,提高鏈輪內徑的檢測精度對先進測量儀器發展進程有著十分重要的意義。
傳統的鏈輪內徑測量采用游標卡尺測量法、內徑千分尺測量法等,其中游標卡尺、內徑千分尺以其輕便性,成本低等優勢廣泛地在授課教學以及工業檢測中使用。但由于屬于接觸式測量,測量過程中容易對物體表面產生一定損傷,還存在著測量誤差大、測量器械使用門檻較高等缺陷。并且人工檢測存在效率低、可靠性差、易因工人疲勞而產生誤檢等弊端,難以滿足現在制造業強調的實時、快速、在線和非接觸檢測的特殊要求[2]。而隨著圖像處理水平的提高,機器視覺逐漸成為熱門的研究內容,是取代傳統測量手段的理想方式之一。同時對于傳統的鏈輪內徑圖像處理算法,因為有著較多的圖像噪聲等的干擾因素,其檢測精度已經無法滿足當下工業生產要求,因此對鏈輪內徑的視覺檢測的研究有著重要意義。
本文針對傳統檢測效率低以及傳統算法對鏈輪邊緣動態噪聲處理能力弱等不足,設計了一種基于機器視覺的鏈輪內徑檢測系統。通過相機將拍攝到的鏈輪圖像轉化為數字信號,再通過圖像處理算法,過濾掉大部分噪聲,增強鏈輪內徑圖像輪廓邊緣信息對比度,增加對鏈輪內徑的測量精度。與傳統人工內徑測量技術和傳統的鏈輪內徑圖像增強檢測算法技術相比,該方法具有更高的精度與效率。
1 算法介紹
■ 1.1 雙邊濾波
現實中存在各種干擾,例如電源接入的電磁干擾、環境亮度不夠均勻等。這些干擾會使圖像采集產生不同形式的噪聲,例如,拍攝環境亮度較暗或相機長期工作溫度較高時,容易產生高斯噪聲;又例如,相機傳輸信道,解碼處理等過程容易產生椒鹽噪聲。對于本文所涉及的系統而言,電源接入的電磁干擾是最大的影響,因此在圖像采集過程中,鏈輪邊緣處像素值不明確,存在明顯的動態噪聲,使得后續的圖像處理以及內徑計算精度受到不少影響。因此對噪聲的過濾是圖像預處理過程中非常重要的一環。而傳統的濾波算法效果一般,往往噪點對輸出圖像有較大影響,無法較好地保護圖像細節。例如,均值濾波使用模板內所有像素的平均值代替模板中心像素灰度值[3]。顯而易見,若圖像存在噪聲,模板內噪點數值會進入均值計算,輸出像素值會受到干擾;又例如,中值濾波計算模板內所有像素中的中值,并用所計算出來的中值代替模板中心像素的灰度值[4],該方法能夠簡單有效地過濾脈沖噪聲,但對于該系統拍攝的圖像,會導致圖像不連續,不能有效地保留鏈輪邊緣細節。
本系統采用濾波能力相對較好的雙邊濾波。雙邊濾波算法 (Bilateral Filters)于 1998 年由 C Tomasi和 R Manduchi提出[5]。雙邊濾波同時考慮了像素的歐式距離和像素范圍域的輻射差異[7],即空域信息和灰度相似性,離模板中心的較遠的像素點賦予較小的權值,弱化噪聲影響。與過去用的傳統算法如維納濾波和高斯濾波對比,邊緣處理較好,不會過于模糊,對高頻細節的保護效果較好。雙邊濾波保護了圖像整體像素的細節,同時起到了對圖像的降噪平滑、保持邊緣的效果。
公式(1)和(2)給出了雙邊濾波的操作。Iq為輸入圖像,為濾波后的圖像:

參數σs定義了用于過濾像素的空間鄰域的大小,σr控制了相鄰像素由于亮度差異而下降的程度,對權重的總和進行標準化。
■ 1.2 小波變換
雙邊濾波算法較好地濾除了圖像噪聲,但濾波會使得圖像趨于平滑,對比度降低。而對鏈輪而言,圖像信息主題主要為邊緣信息,濾波后會使其不明確區域增加,因此需要進行對比度增強的處理。本系統采用增強效果較好的小波變換算法。
小波變換(wavelet transform,WT)由 J Morlet首先提出。小波變換是進行信號時頻分析和處理的理想工具。其在高頻像素處對時間進行細化,低頻處對頻率進行拆分,進而可聚焦到圖像模板內任意像素集合內的任意信號細節使得處理過后的臨域內的像素值波動較小,趨于完整[6]。在增強過程中,其利用小波函數系表示或逼近原始信號,分離出高頻成分與低頻成分[7]。再通過對高頻成分設定閾值函數過濾噪聲,通過乘以不同增強系數的方法在不同的尺度上對不同頻率范圍內圖像的細節分量進行增強。這樣就能夠在突出圖像細節特征的同時,有效抑制圖像噪聲的影響,使圖像輪廓更加突出[8]。
小波函數系用小波函數ψ(x)和尺度函數ψ(x)來表示,定義為[9]:

式中,j0為任意一個起始的尺度,cj0(k)為尺度系數,dj(k)為小波系數。
2 基于機器視覺的鏈輪內徑測量系統設計
■ 2.1 硬件設計
在實際測量環境中,環境亮度、鏈輪的位置對于圖像采集有一定影響。環境亮度過低時,采集到的圖像噪聲較多,會增加后續的處理難度。因此硬件上添加了可調光源,由于較小的亮度影響可以軟件處理,所以亮度要求不高。在系統使用前,使用MVS觀察相機采集圖像,手動調節可調光源至觀察到明顯鏈輪輪廓。而鏈輪位置的不同會導致拍攝圖像的畸變,對系統檢測精度影響較大,因此需要在硬件上添加自動調節系統,以增加測量精度,減少人工擺正的環節,減小一定的時間成本。所以該系統需要完成鏈輪位置控制與內徑測量兩功能。
硬件整體設計框圖如圖1所示。

圖1 硬件設計框圖
其中,作為位置控制的反饋環節與內徑測量的輸入裝置,相機的選擇是整個系統的關鍵。相機使用MV -CE200-10UM,該相機為2000萬像素1″CMOS USB3 0工業面陣相機,其像元尺寸為2 4μm×2 4μm,分辨率為5472×3648,信噪比為41 5dB。該工業相機具有較高的傳輸能力、圖像穩定能力和抗干擾能力等,圖像獲取和傳輸損失較少,以此保證內徑測量精度。
相機捕獲圖像信息后,將數據傳入上位機,若已完成鏈輪位置控制,上位機進行后續的圖像處理。若未完成,則通過HC-05藍牙模塊與單片機進行通訊,傳輸鏈輪位置偏差數據。該藍牙模塊是基于Bluetooth Specification V2 0帶EDR藍牙協議的數傳模塊。可以實現10m距離通信。以此完成非接觸式測量的目標。
藍牙傳輸過程中,需要單片機獲取數據并在此之后,控制步進電機對鏈輪位置進行改變。考慮單片機的使用效率以及經濟性,本系統的單片機選擇STM32F103C8T6。它是基于ARM Cortex-M 內核的32位的微控制器,工作頻率為72MHz,能有效滿足本系統要求。
■ 2.2 軟件設計
該設計由兩部分完成,一是鏈輪位置控制,二是鏈輪內徑測量。
2.2.1 鏈輪位置控制
LabVIEW具有圖形化、多線程、程序編寫門檻低、設計效果美觀等特點。因此使用LabVIEW進行上位機設計。
圖2為LabVIEW前面板,選擇串口、波特率、停止位和數據位等信息后,點擊“啟動”,系統開始工作,進行鏈輪位置調節。當鏈輪位于相機正下方,進行內徑測量,于“顯示窗口”中顯示當前時間、鏈輪序號和鏈輪內徑數值,同時記錄于后臺表格。該程序在執行一次后自動停止,等待下一鏈輪的放置以及啟動命令。點擊“關閉串口”可斷開與下位機的連接。點擊“清除窗口”可對“顯示窗口”的數據進行清除。

圖2 LabVIEW前面板
具體控制流程如圖3所示。

圖3 鏈輪位置控制流程圖
第一步,LabVIEW配置藍牙通訊參數,通過通用異步收發傳輸器(UART)與單片機建立聯系;
第二步,界面點擊啟動按鍵,通過USB3 Vision協議與相機通訊,獲取相機數據,并實時地記錄并覆蓋于本地;
第三步,由于該相機為黑白相機,像素值差異較大。可以通過遍歷法尋找圓心,即對圖片先進行行搜索,尋找每一行中像素數值變化最明顯的兩個點,以像素為單位記錄兩點距離。再對距離數組進行搜索,尋找最大值,記錄最大值所在行值。再對列進行上述操作,尋找最大值所在列值,以此確定鏈輪圓心。該數據與圖像中心點進行比對,估計橫縱位置差距。若圓心與圖像中心點重合,則跳過后續步驟,進行直徑測量程序;
第四步,LabVIEW通過藍牙與STM32進行通訊,于后臺實時發送鏈輪與圖像中心點的橫縱差距;
第五步,STM32控制由兩個步進電機組成的十字滑臺模組緩慢移動,改變鏈輪位置。
通過不斷循環步驟二至五,最終達到鏈輪中心位于相機正下方。
圖4為LabVIEW前面板運行圖,此時藍牙通訊串口選擇COM3接口,波特率設置為9600,停止位為1,數據位為8,無校驗位。按下“啟動”按鍵后,對同一鏈輪進行測試,結果顯示于“顯示窗口”。

圖4 LabVIEW前面板運行圖
2.2.2 鏈輪內徑測量
測量算法由圖像獲取、圖像去噪、圖像增強和直徑測量四部分組成。
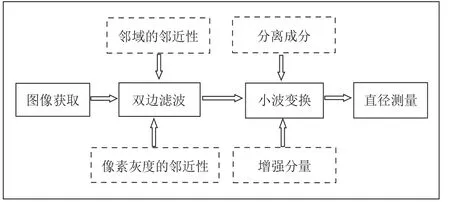
圖5 測量程序流程框圖
圖像獲取:LabVIEW通過USB3 Vision協議,與相機進行通訊獲取圖像數據。
圖像去噪:本系統使用雙邊濾波,即使用特定模板對圖像進行卷積。根據公式(1),該模板中,臨近權值接近1,對卷積結果起較大作用;邊緣權值接近0,對結果起較小作用。因此對原始圖像低頻區域進行卷積,可以起到高斯模糊的作用,對原始圖像高頻區域進行卷積,可以減小邊緣像素值對結果的影響,從而可保護圖像的細節信息。所以相比與其他算法,使用雙邊濾波不僅有效抑制噪聲,同時有效保留圖像大部分細節,保證鏈輪邊緣不確定區域不會拉伸。
圖像增強:本系統進行Harr小波變換。對M*N大小的圖像,首先進行行分解,在第一行上取每一對的平均值,放前N/2處,再將每一對的第一個像素值與該平均值做差,放后N/2處。依次對原始圖像的每一行進行上述操作;再進行列分解,在第一列上取每一對的平均值,放在前M/2處,再將每一對的第一個像素值與該平均值做差,放后M/2處。依次對原始圖像的每一列進行上述操作。以此完成了Harr小波的一次分解。可以按照實際需要,圖像進行多次分解。分解后的圖像可以得到低頻與不同高頻分量,對其乘以不同增強系數。處理后再進行小波重構得到增強后的圖像。
測量直徑:采用遍歷法,對鏈輪位置控制中獲取的最大值所對應的行值和列值進行平均,計算得直徑像素點數,乘以映射系數,求得實際直徑。其中映射系數跟相機高度有關,在硬件系統搭建后,對已知標稱n的鏈輪的直徑進行像素點計數,計數值為m。則映射系數為n/m。
■ 2.3 實驗結果與分析
本文對直徑標稱2 5cm鏈輪進行實驗。游標卡尺10次測量平均結果為24 980mm。使用傳統的多尺度細節增強作為對照,經處理后獲得如圖6的圖像。
圖6(a)為采集到的鏈輪原圖。圖6(b)為原始圖像某邊緣的圖像信息,從中可以看出,鏈輪邊緣像素值不明確,存在較寬的不確定帶,在相機連續拍攝過程中,該不確定帶中動態噪聲明顯,因此對若直接進行檢測,檢測結果有較大波動,而該波動會導致測量的誤差。測量結果為25 056mm。圖6(c)為多尺度細節增強處理后的圖像,該圖像鏈輪邊緣像素值仍舊不夠明確,其測量結果為24 948mm;圖6(d)為本文提出的測量方法,通過肉眼觀察法,其對比度增強效果最好,判斷出的邊緣信息更加明確,其測量結果為24 987mm。由以上數據可得,本系統測量精度較人工以及其他算法效果較好。

圖6 實驗結果圖
3 總結與展望
本文設計的系統通過藍牙連接上位機與下位機,實現了非接觸式測量,既避免了物體表面不受損壞,又保障了使用者的安全。同時使用MV-CE200-10UM相機,以像素為單位進行鏈輪內徑計算,相比于人工游標卡尺測量與傳統的鏈輪內徑圖像增強檢測算法等方法,其測量精度較高,能夠達到工業5絲的精度要求。
但本文提及的算法計算量大,對于計算設備要求高,還無法實現硬件獨立工作。因此接下來的工作中需要進行以下優化,在算法方面上,需要對計算進一步優化,減小計算量,提高執行速度。在硬件方面,需要提高鏈輪中心點瞄準速度與精度,通過引入PID等控制理論,提高控制精度,實現控制的穩準快。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
