大型障礙物影響下航向信標敏感區的劃設
2023-02-01 03:05:16倪育德于穎麗劉瑞華
系統工程與電子技術 2023年2期
倪育德, 于穎麗, 劉瑞華,*, 秦 哲, 王 凱
(1. 中國民航大學電子信息與自動化學院, 天津 300300;2. 中國民航大學中歐航空工程師學院, 天津 300300)
0 引 言
航向信標(localizer, LOC)是儀表著陸系統(instrument landing system, ILS)的重要組成部分,為飛機提供水平制導信息[1-2],其輻射場極易受環境影響,機坪上的車輛、等待的飛機、跑道附近的機庫、消防站等都有可能作為障礙物影響LOC輻射場的性能。
為減少障礙物對LOC輻射場的干擾,國際民航組織(international civil aviation organization,ICAO)、美國聯邦航空局均規定LOC周圍應劃設臨界區和敏感區作為保護區[3-4]。在LOC設備運行期間,任何車輛(包括航空器)不得進入臨界區,在敏感區停放或移動的車輛(包括航空器)也要受到嚴格管制,否則會對LOC空間信號造成不可接受的影響,出現安全隱患[5]。
目前我國民用運輸機場大部分跑道實施I類(category I, CAT I)運行。中國民航在其“十四五”規劃[6]中提出要加大新機場的建設與舊機場的擴建,并提升重點機場II類(category II, CAT II)、Ⅲ類(category III, CAT III)ILS運行保障能力。越高等級的運行標準所要求的LOC保護區越大。當跑道從CAT I運行提升至CAT III運行后,因保護區擴大,建在跑道附近的一些大型建筑物,如機庫、消防站等,就面臨是否拆除的問題。而ICAO劃設的LOC保護區并沒有考慮大型建筑物的影響,且對目前劃設的LOC保護區沒有提供任何理論說明。因此,建立相應理論模型,評估大型建筑物對LOC輻射場的影響,具有重要且迫切的現實意義。另一方面,目前有關ILS性能評估的專業軟件幾乎都是國外的產品,如意大利IDS AirNav公司開發的EMACS(electromagnetic airport control and survey),法國民航大學開發的ATOLL/LAGON(advanced trainer on localizer/learning about glide for overall needs)。本文的研究可為開發具有自主知識產權的ILS性能評估軟件提供相應底層支持。
目前國內外有關多徑干擾對LOC影響研究的方法主要包括物理光學(physical optics,PO)法、射線追蹤法(ray tracing method,RTM)、幾何光學(geometric optics,GO)法、幾何繞射(geometrical theory of diffraction, GTD)法等。文獻[7]在亥姆霍茲方程的基礎上利用PO法計算障礙物的反射信號,并使用美國國家航空設施實驗中心的專業軟件進行仿真,從而獲得反射信號對LOC的影響[7]。文獻[8]在成比例縮放的模擬環境中,利用信道探測結構測量了大型滑行飛機產生的多徑傳播信號[8]。文獻[9-11]利用簡化的RTM法快速計算機場復雜建筑物產生多徑信號的電磁場,分析其對LOC的影響[9-11]。也有文獻通過添加天線陣因子、利用GTD等方法分析機場跑道周圍建筑物對ILS信號造成的影響[12-13]。上述文獻都只分析了LOC輻射信號受到的干擾,研究結果并沒有與LOC敏感區相聯系;且在使用的理論方法中,GO法相比其他方法具有物理概念清晰、信號傳播軌跡明顯、算法效率高等優點,而一致性幾何繞射理論(uniform GTD, UTD)是在GO法基礎上發展起來的,既有GO法的優點,又引入繞射射線,并解決了GTD信號在陰影邊界過渡區失效問題。
本文通過對跑道附近大型建筑物建模,利用UTD,研究不同材質建筑物在不同位置產生的多徑信號對LOC輻射場的影響,并分析飛機接收的引導信號因多徑效應產生的誤差,從而找出在大型障礙物影響下LOC敏感區劃設的理論依據,在此基礎上規劃新的敏感區,并為國內某4F樞紐機場某條跑道附近的機庫是否拆除提出相應建議。
1 LOC輻射方向性及DDM
1.1 LOC輻射方向性的形成
LOC輻射由150 Hz和90 Hz調制的兩個調幅信號通過“和”、“差”運算所形成的載波邊帶(carrier and sideband,CSB)信號和純邊帶(sideband only,SBO)信號,采用水平極化的對數周期陣列天線,該陣列天線由若干個對數天線陣元組成,呈一字形排列,且沿跑道中心線左右對稱分布。
CSB信號采用等幅同相饋電方式饋電給對稱的左右天線陣元,而SBO信號采用等幅反相饋電方式饋電給左右對稱天線陣元[14-15]。以陣列天線相位中心為參考點,左右對稱的兩副陣元構成一對二元陣列天線,利用天線方向圖乘積定理,求得n對天線疊加后總的輻射方向性函數為
(1)
(2)
式中:FCSB(θ)、FSBO(θ)分別為LOC輻射CSB、SBO的方向性函數;cos(π/2·sinθ)為對數陣元水平方向性函數;θ為相對跑道中心線的方位角;λc為載波波長;第i對天線相對陣列天線相位中心距離為di;天線饋電幅度為Ai。
設定航向信號和余隙信號的載波頻率分別為111.10 MHz-5 kHz和111.10 MHz+5 kHz,根據雙頻20單元LOC陣列天線的饋電,得到水平輻射方向圖,如圖1所示。其中,COU CSB和COU SBO分別表示航向CSB信號、航向SBO信號,CLR CSB和CLR SBO分別表示余隙CSB信號、余隙SBO信號。
多單元陣列天線可以使航向信號主瓣波束變窄以減弱多徑效應的影響,而雙頻輻射的余隙信號波束較寬,可以增大覆蓋范圍。下面采用雙頻20單元航向天線研究障礙物對LOC的影響。
1.2 調制度差
調制度差(difference in depth of modulation,DDM)是機載LOC接收機所接收的150 Hz信號與90 Hz信號對載波的調制度之差[16-18],即
DDM=M150-M90
(3)
式中:M150和M90分別表示LOC輻射場中150 Hz信號與90 Hz信號對載波的調制度,可表示為
(4)
式中:m150=m90=0.2;l為SBO信號與CSB信號的幅度比。
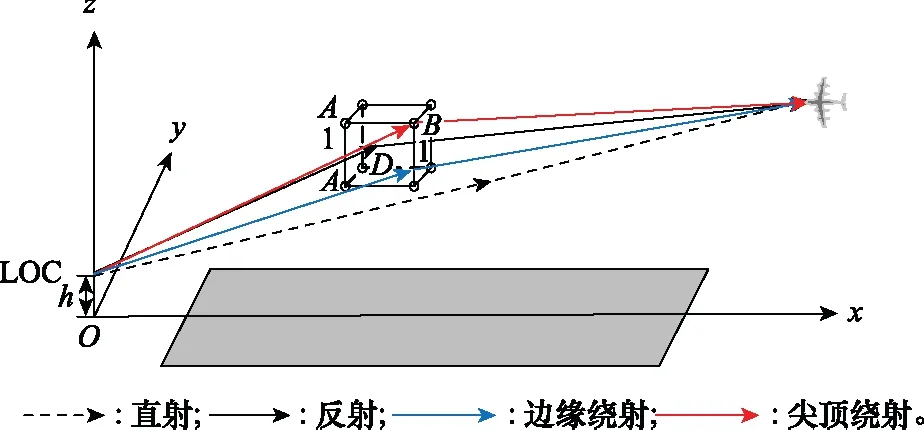
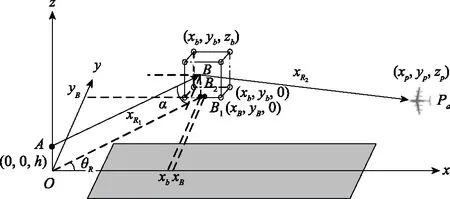
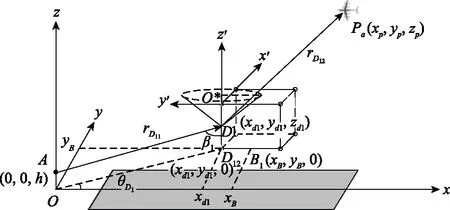
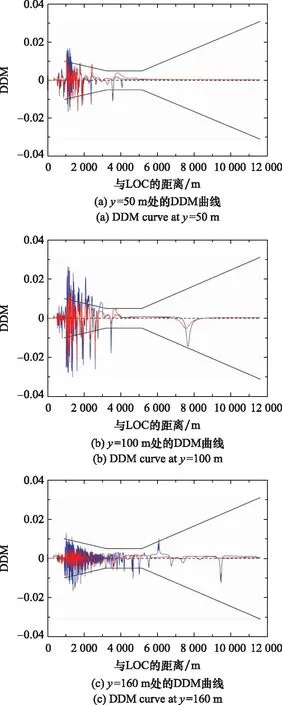
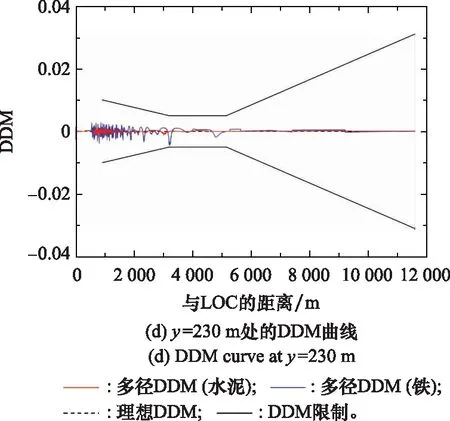
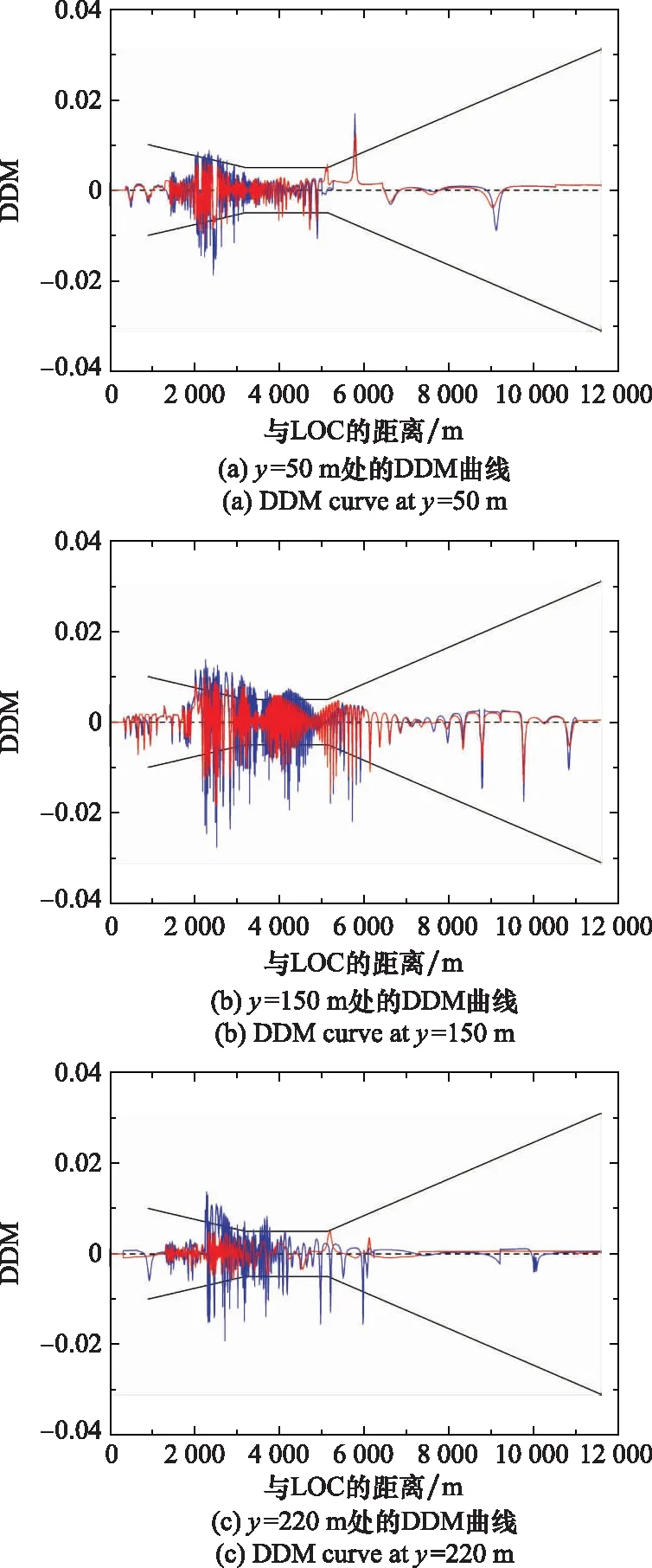
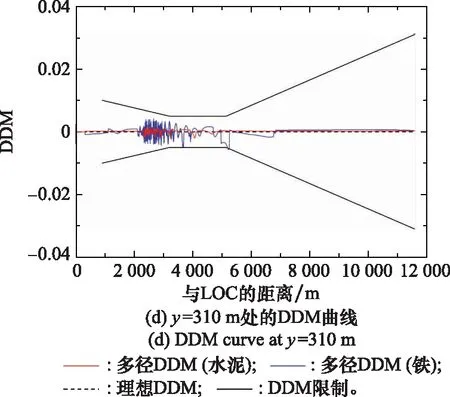
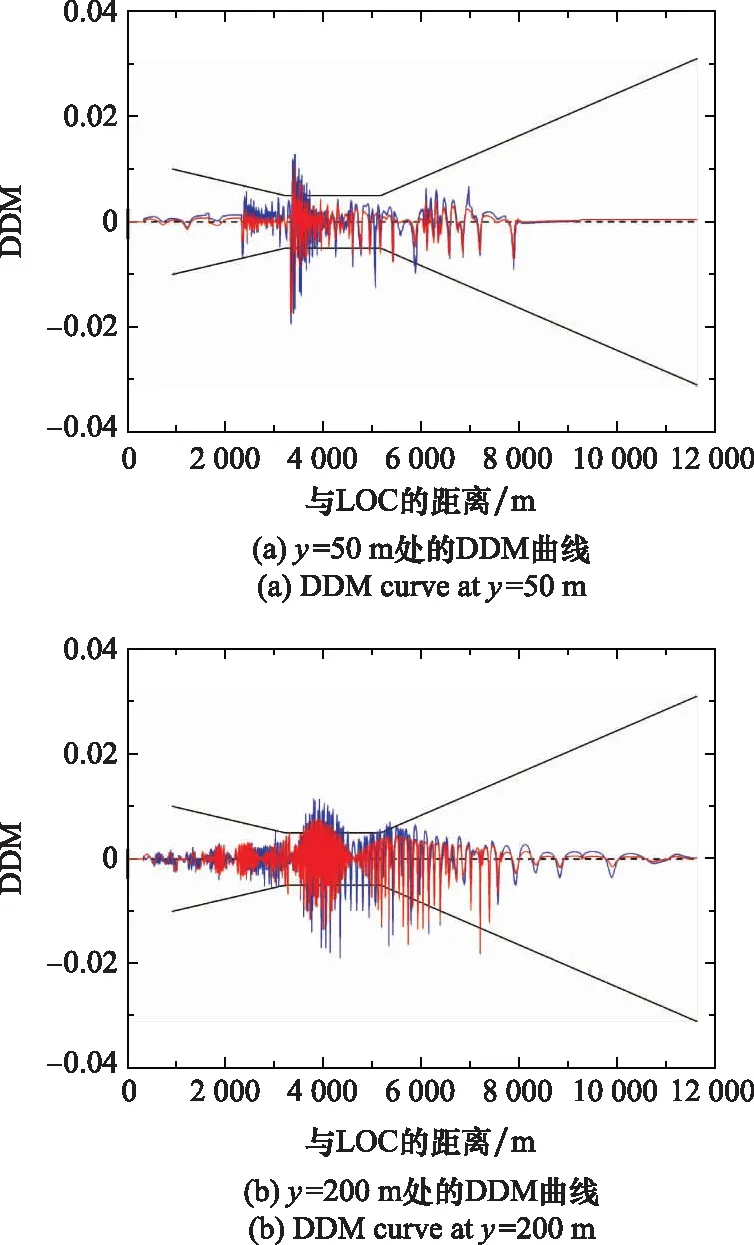
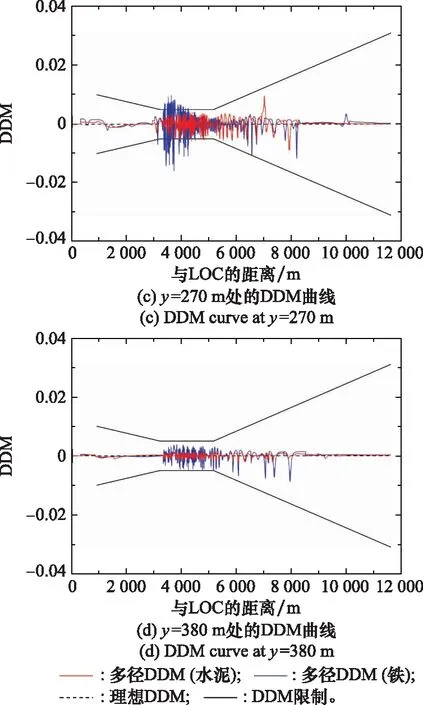
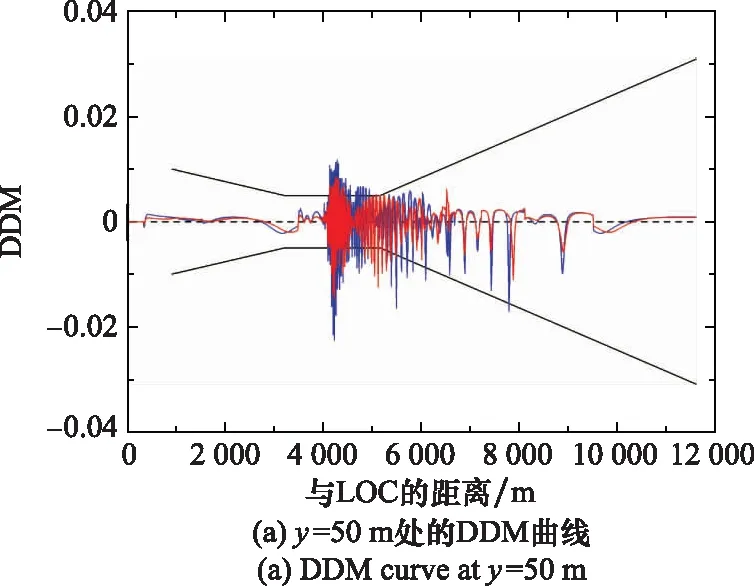
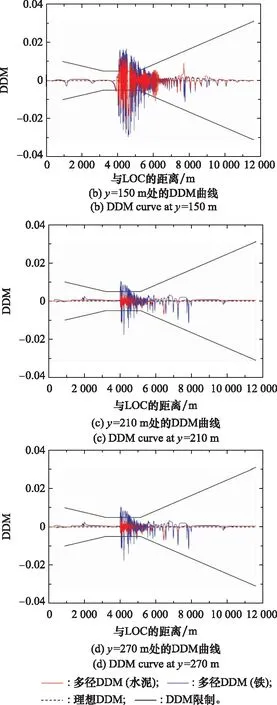
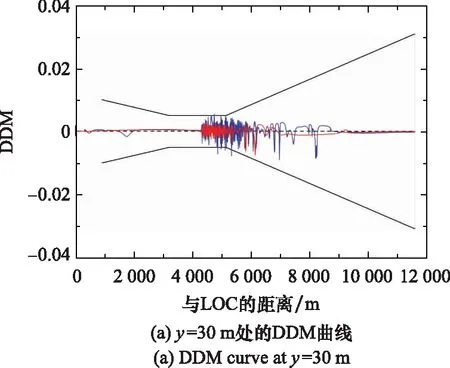
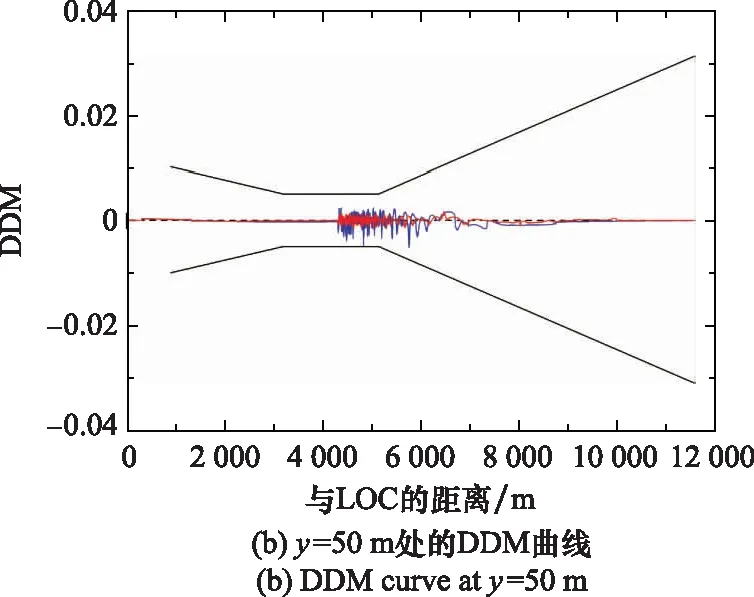
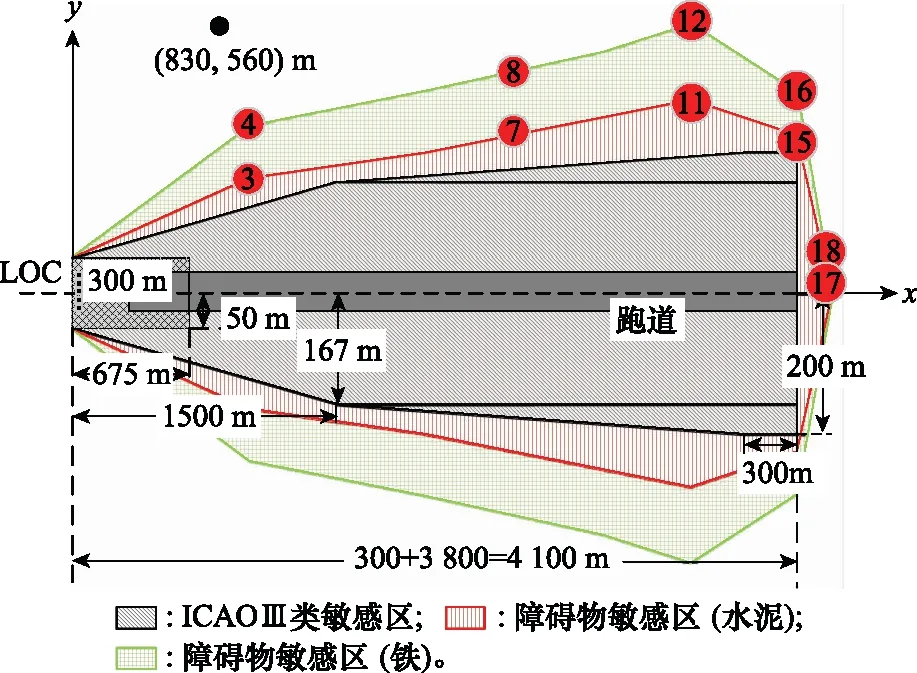
機載LOC系統利用DDM引導飛機飛行:M150=M90且DDM=0時飛機位于航向面上;M150>M90且DDM>0時飛機位于航向面右邊,指示飛機左飛;若M150 理想情況下,若飛機沿航向面進近,DDM應恒為0,在下滑線上理想DDM曲線為一條DDM恒為0的直線。當存在障礙物或地形起伏等非理想情況時,多徑效應會引起DDM抖動,下滑線上的DDM不再恒為零。為此對于CAT I/II/III運行,ICAO規定了LOC DDM彎曲幅度范圍[3],如圖2所示。 只要DDM的抖動或變化在ICAO規定的限制范圍內,即可引導飛機正常進近著陸;也可以利用DDM的限制范圍來評估多徑效應對DDM影響的大小。 LOC輻射信號波長屬于米波,在其輻射區的障礙物相對波長屬于電大尺寸物體,可以采用UTD分析LOC輻射場。 根據UTD,LOC輻射信號沿射線傳播。將障礙物分解成幾種簡單的幾何結構,找到對接收場點輻射強度有顯著貢獻的所有射線信號軌跡,并求出每根射線信號的貢獻,總場就是這些信號貢獻之和。 由于我國機場跑道附近的建筑物幾乎都是長方體,所以將障礙物設定為長方體。除LOC直射信號外,長方體障礙物還會引起反射、繞射等多徑信號,如圖3所示,其中LOC陣列天線相位中心高度為h。要進行LOC多徑信號場的分析,第一步進行LOC信號的射線尋跡,找到LOC直射信號以及障礙物引起的反射和繞射信號的射線軌跡,第二步進行LOC信號的場計算。 圖3 LOC附近障礙物引起的多徑信號Fig.3 Multipath signals caused by obstacles near LOC 直射信號就是連接發射天線和接收天線之間未受阻擋的射線信號,連接LOC天線和飛機即可得到直射信號軌跡。 對于輻射功率為P的各向同性天線,距離天線r處的能流密度S為 (5) 自由空間磁場強度Ha和電場強度E的關系為 (6) (7) 聯合式(5)和式(7)可得 (8) 再結合LOC天線的方向性和相位變化,可得機載LOC接收天線接收的直射信號場為 (9) 式中:Er(E)為機載LOC接收天線接收的LOC直射信號電場強度;r為航向天線與飛機之間的距離;波數k=2π/λc;F(θ)為輻射CSB信號或SBO信號的方向性函數角, LOC輻射CSB信號與SBO信號的F(θ)分別為 (10) (11) 一次反射信號軌跡是從LOC天線經過障礙物表面上一個反射點到達接收端的。以LOC陣列天線相位中心在地面的投影為原點,沿天線高度向上為z軸,跑道中心線為x軸建立反射信號模型,如圖4所示。 圖4 LOC反射信號Fig.4 Reflection signal of LOC 假設LOC陣列天線的相位中心為A點,障礙物為長方體,長寬高分別為L、W、H,障礙物正面底邊中點坐標為B1(xB,yB,0),飛機坐標為Pa(xp,yp,zp),反射點為B(xb,yb,zb),反射點B在障礙物底邊的投影為B2(xb,yb,0)。根據鏡像原理可得 (12) 因此反射點B的坐標為(1/2xp,yB,1/2(zp-h)+h)。比較B點坐標和障礙物的位置,若B點在障礙物表面,可以確定A→B→Pa為反射信號軌跡,再進行反射信號場的求解。 由于LOC要求輻射水平極化波,理想情況下在傳播過程中垂直分量為零,所以下面只需研究電場的水平分量。 機載LOC接收天線處的LOC反射信號場Er(R)主要與反射點處的入射場Ee(R)、水平反射系數R‖(α)以及路徑擴散因子A(r)有關,可表示為 Er(R)=Ee(R)·R‖(α)·A(r)·e-jkrR2 (13) 式中:rR2為反射點B到飛機Pa的距離。 Ee(R)為反射點處入射場的水平分量,可表示為 (14) 式中:θR為反射點B相對于航向天線A的方位角;F(θR)為LOC輻射CSB信號或SBO信號的方向性函數,可由式(10)與式(11)得出;rR1為A和B之間的距離;P為LOC天線輻射功率。 路徑擴散因子為 (15) 水平反射系數為 (16) 式中:α為入射角;εc為相對介電常數,與障礙物的材質有關。對于水泥材質,εc約為6;對于鐵質材料,εc為14.2。 LOC繞射信號軌跡即從LOC天線經過繞射點到達機載接收端。長方體障礙物引起的繞射分為邊緣繞射和尖頂繞射,且會產生多條繞射信號。 2.3.1 LOC邊緣繞射信號 LOC邊緣繞射信號遵循Keller錐模型,邊緣繞射信號與邊緣(或邊緣切線)的夾角等于相應的入射信號與邊緣(或邊緣切線)的夾角[19-21]。 以障礙物的一條邊緣為例求解邊緣繞射場,建立模型如圖5所示。 圖5 LOC邊緣繞射信號Fig.5 Edge diffraction signal of LOC 航向天線、飛機及障礙物參數同圖4,所求繞射點坐標為D1(xd1,yd1,zd1),繞射點D1在障礙物底邊的投影為D12(xd1,yd1,0),根據Keller圓錐理論求解繞射點坐標可得 (17) 繞射點D1坐標為(xB-L/2,yB,zd1),zd1為式(17)的解。 判斷D1坐標是否在邊緣上,若不在,則該邊緣繞射信號軌跡無效,邊緣繞射信號場為零;若D1在邊緣上,可以確定A→D1→Pa為一條邊緣繞射信號軌跡,再進行邊緣繞射信號場的求解。 該邊緣在機載LOC接收天線處的邊緣繞射場Er(D1)與繞射點處的入射場Ee(D1)、繞射系數D以及擴散因子A(r)有關[22-24],可表示為 (18) 式中:rD12為D1、Pa之間的距離;為并矢運算,為并矢繞射系數。 Ee(D1)為繞射點D1處入射場的水平分量,可表示為 (19) 式中:θD1為繞射點D1相對于航向天線A的方位角;F(θD1)為LOC輻射CSB信號或SBO信號的方向性函數,具體參考式(10)與式(11);rD11為A、D1之間的距離。 擴散因子為 (20) 為求解繞射系數,需以所求繞射邊緣為z′軸,建立右手坐標系如圖5所示。 將障礙物和邊緣繞射信號投影在x′O′y′面上,得到圖6。邊緣劈與z′軸重合,兩個劈面分別與0和nπ兩個坐標面重合,因此內劈角為(2-n)π。A′、P′分別為LOC陣列天線相位中心A和飛機Pa的投影,A′O′、O′P′分別為繞射信號的入射射線和繞射射線的投影,φ′、φ分別為投影的入射角和繞射角。 圖6 LOC邊緣繞射信號的投影Fig.6 Projection of the edge diffraction signal of LOC 邊緣繞射系數[25-27]為 (21) 式(21)中的F(x)是用來修正Keller非一致性解的過渡函數,且 (22) a±(β)則為 (23) 式中:β=φ±φ′;N±是滿足下列方程的最小整數: (24) 式(24)所得的N+和N-各有兩個值,分別對應于繞射系數中的4項。 機載LOC接收天線處的LOC邊緣繞射信號場為全部有貢獻的邊緣繞射場疊加之和,即 (25) 式中:Er(D)為機載LOC天線接收的總邊緣繞射場;Er(Di)為第i條邊緣在LOC接收天線處貢獻的邊緣繞射場;m為有效邊緣個數。 2.3.2 LOC尖頂繞射信號 尖頂繞射也稱為拐角繞射。由于物體長度有限,每個邊緣在拐角處停止,每個邊緣繞射場將突然停止,并在邊緣繞射陰影邊界處產生不連續。拐角繞射場消除了這種不連續性,從而彌補了邊緣繞射場的終止[28-31]。 由于尖頂是唯一確定的點,只要沒有遮擋,從LOC天線經過頂點到達飛機就是唯一確定的尖頂繞射信號軌跡。 根據UTD,長方體障礙物每個頂點的尖頂繞射場是構成頂點的每條邊所產生的尖頂繞射場之和,例如長方體的每個頂點都由3條邊緣組成,每個頂點的尖頂繞射場都是3條邊緣產生的有效尖頂繞射場之和。 以障礙物的一個頂點及該頂點的一條邊緣為例,建立如圖7所示模型。 圖7 LOC尖頂繞射信號Fig.7 Tip diffraction signal of LOC LOC天線、障礙物、飛機以及坐標系參數同圖5。圖7中βo是邊緣繞射的入射角,βc為尖頂繞射的入射角,βoc為尖頂繞射的繞射角,θC1為尖頂C1相對于航向天線A的方位角,rD11、rD12、rC11、rC12分別為A與D1、D1與Pa、A與C1、C1與Pa之間的距離。 圖7中尖頂C1的一條邊緣在機載LOC接收天線處的尖頂繞射場Er(CD1)為 (26) 式中:Ee(C1)為尖頂C1處入射場的水平分量;D為繞射系數;A(r)為擴散因子;rC12為C1、Pa之間的距離。 Ee(C1)可表示為 (27) 式中:F(θC1)為LOC輻射CSB信號或SBO信號的方向性函數,具體計算方法參考式(10)與式(11);rC11為A、C1之間的距離。 擴散因子為 (28) 圖8 LOC尖頂繞射信號的投影Fig.8 Projection of tip diffraction signal of LOC 尖頂繞射系數為 (29) 其中 (30) 式中:k=2π/λc;L、Lc為距離參數,其表達式分別為 (31) 同理可得尖頂C1其他邊緣產生的尖頂繞射場,疊加可得尖頂C1在機載LOC接收天線處的尖頂繞射場Er(C1)為 (32) 式中:Er(CDt)為構成尖頂C1的第t條邊緣產生的有效尖頂繞射場;s為該頂點的有效邊緣個數。 搜索障礙物的所有頂點,將有貢獻的頂點疊加得最終的尖頂繞射場Er(C),可表示為 (33) 式中:Er(Cj)為第j個尖頂在機載LOC接收天線處的尖頂繞射場;n為有效頂點個數。 在機載LOC接收端將接收到的直射信號、反射信號、邊緣繞射信號以及尖頂繞射信號進行疊加,可以得到在障礙物多徑效應影響下的接收場信號強度Er,可表示為 (34) 式中:FCSB/SBO(θ)為LOC天線輻射CSB信號或SBO信號的方向性函數。 機載天線接收信號的DDM值與LOC天線輻射的CSB信號和SBO信號有關,可表示為 (35) 利用式(35)計算障礙物影響下的機載LOC天線接收信號的DDM值,與理想DDM相對比就可以獲得障礙物對LOC天線輻射信號的影響程度。 仿真環境設在具有典型意義的國內某4F樞紐機場,某條跑道實施CAT III運行,跑道長3 800 m,寬50 m。LOC位于跑道中線延長線上,距末端300 m,采用雙頻20單元對數周期陣列天線,LOC饋電功率為20 W。長方體障礙物設置為該機場跑道邊某一機庫,長200 m、寬60 m、高40 m。考慮到跑道附近障礙物大多為鐵質或水泥材質,故將障礙物材質分別設為鐵質和水泥材質進行仿真。 以LOC陣列天線相位中心在地面的投影為原點,跑道中心線為x軸,垂直于跑道中心線為y軸建立坐標系,如圖9所示。 圖9 障礙物相對于LOC天線的位置Fig.9 Position of the obstacle relative to the LOC antenna 其中,陰影部分為在20單元LOC天線輻射時,ICAO針對特大型飛機如A380推薦的CAT III運行的保護區。設置采樣點的原則為:以上述保護區范圍為基礎,遠離保護區邊界時選取采樣點位置較稀疏,即設置較低分辨率;靠近保護區邊界附近則選取采樣點位置較密集,即設置較高分辨率。為此,從原點沿x軸正方向每500 m選取一個障礙物位置,跑道入口處也作為一個采樣點;沿y軸正方向每50 m選取一個位置,臨近邊界處改為每10 m選取一個位置。通過逐點試驗來確定在大型建筑物影響下的LOC敏感區。由于篇幅所限,只給出代表性障礙物位置如表1所示,障礙物相對LOC天線的位置如圖9所示。 表1 障礙物位置 假設飛機沿標稱3°下滑線下滑,至跑道后再滑行至跑道端口,每隔10 m計算一個DDM值,利用Matlab對不同位置障礙物影響下的DDM進行計算仿真。仿真流程如圖10所示。 仿真整體流程分為兩步。第一步根據飛機接收的信號求解信號場,主要分為4部分。 (1) 假設飛機接收1條直射信號,根據飛機位置計算直射場。 圖10 基于UTD理論計算多徑DDM的仿真流程圖Fig.10 Simulation flow diagram of multipath DDM based on UTD theory (2) 假設飛機接收1條反射信號,根據鏡像原理求解反射點坐標,將反射點坐標與障礙物位置相比,判斷反射點是否位于障礙物表面。若否,則該路徑不成立,反射信號路徑數量為0條;反之則路徑成立,反射信號路徑數量為1條,求解反射場。 (3) 假設飛機接收5條邊緣繞射信號,根據Keller圓錐理論分別求解繞射點坐標,將繞射點坐標與障礙物邊緣位置相比,判斷繞射點是否位于障礙物邊緣。若否,則該路徑不成立,邊緣繞射路徑減少1條;反之則路徑成立,求解邊緣繞射場。有效邊緣繞射路徑最多為3條,最少為1條。 (4) 假設飛機接收3條尖頂繞射信號,依次連接LOC、障礙物頂點與飛機,判斷該路徑是否被遮擋。若被遮擋,則該尖頂繞射路徑不成立,尖頂繞射路徑減少1條;在不被遮擋的基礎上,該尖頂繞射路徑才是有效的,進而可以求解尖頂繞射場。有效尖頂繞射路徑最多2條,最少1條。 第二步在機載LOC接收端將接收的直射信號、反射信號、邊緣繞射信號以及尖頂繞射信號進行疊加,求解DDM。 障礙物位于x=1 000 m處的4個位置(y=50 m處,y=100 m處,y=160 m處,y=230 m處)時,對應的DDM隨飛機離LOC距離的變化情況如圖11所示。 圖11 x=1 000 m處各點的DDM曲線Fig.11 DDM curve of each position at x=1 000 m 從圖11可以看出,DDM曲線基本是從障礙物所在位置,即1 000 m左右開始劇烈抖動的,這是因為,當飛機越過障礙物后,障礙物產生的某些多徑信號不再被飛機接收,DDM抖動減弱。從跑道中心線向外,隨著y增大,DDM曲線抖動先劇烈后趨于平緩,最終符合DDM限制。由于鐵質障礙物反射更強,所以相比水泥障礙物,在同一位置,鐵質障礙物對DDM的影響更劇烈。當障礙物靠近跑道時,DDM值超限,不滿足ICAO規定,水泥障礙物在y=160 m處滿足ICAO規定,而鐵質障礙物需要在y=230 m處才符合規定。(1 000,160) m、(1 000,230) m分別是在水泥障礙物和鐵質障礙物影響下LOC敏感區的邊界點。障礙物只能建在邊界點之外,若距離更近則DDM不滿足ICAO要求,對飛機著陸造成安全隱患。 障礙物位于x=2 500 m處的4個位置(y=50 m處,y=150 m處,y=220 m處,y=310 m處)時,對應的DDM隨飛機離LOC距離的變化情況如圖12所示。 圖12 x=2 500 m處各點的DDM曲線Fig.12 DDM curve of each position at x=2 500 m 與圖11類似,圖12中DDM曲線也是從障礙物所在位置,即2 500 m左右開始劇烈抖動的,從跑道中心線向外,隨著y增大,DDM曲線抖動先變劇烈再趨于平緩,最終符合DDM限制。在同一位置,鐵質障礙物比水泥障礙物對DDM曲線的影響更劇烈。水泥障礙物在y=220 m處滿足ICAO規定,而鐵質障礙物需要在y=310 m處才符合要求。(2 500,220)m、(2 500,310)m分別是水泥障礙物和鐵質障礙物影響下LOC敏感區的邊界點。 圖13展示了障礙物位于x=3 500 m處的4個位置(y=50 m處,y=200 m處,y=270 m處,y=380 m處)時,對應的DDM變化情況。 圖13 x=3 500 m處各點的DDM曲線Fig.13 DDM curve of each position at x=3 500 m 從圖13可以看出,在x=3 500 m處,在水泥障礙物和鐵質障礙物影響下,LOC敏感區的邊界點分別為(3 500,270) m、(3 500,380) m。 圖14展示了障礙物位于x=4 100 m處的4個位置(y=50 m處,y=150 m處,y=210 m處,y=270 m處)時,對應的DDM變化情況。 在x=4 100 m處,在水泥障礙物和鐵質障礙物影響下,LOC敏感區的邊界點分別為(4 100,210) m、(4 100,270) m。 障礙物位于x=4 500 m處的2個位置(y=30 m處,y=50 m處)時,對應的DDM隨飛機離LOC距離的變化情況如圖15所示。 圖14 x=4 100 m處各點的DDM曲線Fig.14 DDM curve of each position at x=4 100 m 圖15 x=4 500 m各點的DDM曲線Fig.15 DDM curve of each position at x=4 500 m 在x=4 500 m處,水泥障礙物在y=30 m處DDM就已符合ICAO規定,但同一位置,鐵質障礙物引起的DDM抖動起伏更劇烈,需要移至y=50 m處DDM才符合ICAO規定。 上述仿真障礙物只設置在跑道一側,障礙物位于跑道另一側對稱位置時得到的結果相同。 綜合上述仿真實驗結果,圖16給出了在大型障礙物影響下LOC的敏感區規劃。圖中紅色豎條紋區域和綠色格紋區域分別為在水泥材質和鋼質大型障礙物影響下,對ICAO III類運行LOC敏感區的擴展部分。 圖16 仿真規劃的敏感區Fig.16 Sensitive area of simulation setting 可以看出,相比飛機,大型障礙物體積更大、高度更高,造成的多徑干擾也會更大,所以需要的敏感區也更大。由于鐵質障礙物相比水泥障礙物反射更強,引起的多徑信號也更強,所以鐵質障礙物影響下需要的敏感區要大于水泥障礙物影響下的敏感區。大型建筑物只能建在圖16所示敏感區范圍之外,否則會影響飛機正常進近著陸,造成安全隱患。 對于國內某4F級樞紐機場實施CAT III運行的某條跑道,圖16中黑色圓點表示該機庫的實際位置。該機庫相對于LOC橫向距離為830 m,距離跑道中心線560 m,正對跑道一側為鐵門。從本文仿真結果可以看出,該機庫在敏感區范圍之外,不需要拆除,但為保險起見,建議將鐵門換成反射強度更低的材質。灰色油漆的反射系數與水泥的反射系數相近,都小于鐵質材料的反射強度,可以在鐵門上刷一層灰色的油漆以降低反射強度,減少多徑干擾。 本文在研究雙頻LOC輻射場的基礎上,建立大型建筑物的多徑信號模型,利用UTD分析障礙物多徑效應對LOC輻射信號的影響,并針對某4F樞紐機場跑道附近大型機庫對LOC DDM的影響進行仿真,規劃該機庫影響下的LOC敏感區。仿真結果表明,大型障礙物產生的多徑信號會引起機載LOC天線接收信號的DDM抖動,從而影響飛機正常進近著陸。當障礙物建在LOC敏感區內,會導致DDM抖動超過ICAO規定范圍;在敏感區外,干擾會減小,DDM滿足ICAO規定。對于不同材質的障礙物,反射能力強的材質需要更大的敏感區。從仿真結果來看,該樞紐機場機庫位于仿真的敏感區之外,不需要拆除,為保險起見,建議將機庫鐵門刷一層反射強度更低的灰色油漆,以降低該機庫的多徑信號對LOC DDM的影響。2 障礙物引起的LOC多徑信號
2.1 LOC直射信號
2.2 障礙物引起的LOC反射信號
2.3 障礙物引起的LOC繞射信號


2.4 障礙物影響下機載LOC天線接收場的DDM
3 仿真實驗及分析
3.1 仿真條件
3.2 仿真結果及分析
4 結 論
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代陜西(2019年11期)2019-06-24 03:40:28
中國生殖健康(2019年3期)2019-02-01 06:12:26
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25