基于合作目標的外輻射源雷達發射站直接定位
2023-02-01 03:16:40饒云華朱華梁鄭志杰
系統工程與電子技術 2023年2期
關鍵詞:信號
饒云華, 朱華梁, 鄭志杰
(武漢大學電子信息學院, 湖北 武漢 430072)
0 引 言
外輻射源雷達利用第三方發射站(如廣播電視等)發射的信號作為照射源對目標進行探測定位,具有抗干擾能力強、隱蔽性好等優點,受到學者們的廣泛關注[1-4]。外輻射源通常為帶寬較寬的連續波信號,有利于對目標進行精細化探測,占偉杰等[2]利用數字電視外輻射源雷達對直升機、通航飛機及無人機等多種目標的微動特征進行了提取與分析。還有學者研究了外輻射源雷達獲取目標多維特征的方法,實現了目標的分類識別[3]。
在利用外輻射源雷達進行目標探測定位時,首先對參考通道接收到的直達波信號和監測通道接收到的目標反射信號進行處理,從中估計出包含目標位置信息的定位參數,如到達時間、到達時間差、到達角度、到達頻差等。然后再利用包含目標位置信息的定位參數與收發站位置之間的幾何關系建立定位方程并求解[5-10]。一般而言,只需其中一個參數便可進行定位。例如,Zhao等[5]和Li等[6]分別基于到達時間和到達時間差進行定位。為了進一步獲得更高的定位精度,往往需要聯合多個參數進行定位,Pine等[7]基于信號到達不同接收站的時延差和頻率差進行定位,Zhao等[8]則基于到達角度、多普勒頻率和多普勒頻率變化率提出了一種運動目標定位方法。
然而,無論是使用單個參數還是多個參數,外輻射源雷達目標定位性能都會極大地受到發射站位置信息精度的影響。其中,接收站位置可控,故其位置信息容易獲得,而發射站由于為不可控的第三方發射站,其精確位置信息有時候往往無法預先獲取,極大影響了外輻射源雷達的實際應用。同時,即使可預先獲取部分發射站位置信息,實際中也可能會有發射站位置變化或者新增發射站。因此,快速高效的獲得發射站位置是外輻射源雷達實用化所必須解決的一個重要問題。
目前,關于外輻射源雷達的發射站定位方法主要是首先估計出合作目標的速度、雙基地距離差等中間參數,然后利用合作目標所攜帶的全球定位系統或廣播式自動相關監視(automatic dependent surveillance-broadcast, ADS-B)系統來獲取目標精確位置信息,實現對發射站位置的估計。該方法中目標參數估計和位置估計是分開的,故常稱為兩步定位法。Yi等[11]在獲取飛機所攜帶ADS-B提供的目標位置信息基礎上,通過測量目標雙基距離與基線距離之差得到多個發射站可能位置的橢圓,多個橢圓交點即為發射站真實位置。Malanowski等[12]也利用ADS-B得到飛行目標的笛卡爾坐標系軌跡信息,并將其變換到雙基地軌跡,然后通過匹配雙基地軌跡的雙站距離和速度得到發射站位置。Krueckemeier等[13]針對多目標情況下關聯的復雜性,將三坐標目標信息近似處理轉換為兩坐標,建立距離和多普勒的代價函數,將雙站雷達目標觀測值與真實信息正確穩定關聯,從而實現發射站定位。
以上研究都是基于兩步定位法開展的,該方法在經過中間參數估計后會存在信息損失問題。針對這一不足,本文提出了利用直接定位方法進行發射站定位。直接定位方法最初由Weiss[14]和Amar等[15]提出。該方法直接對原始采樣信號進行處理,利用信號中蘊含的目標位置信息,構建與目標位置相關的代價函數,通過優化算法實現定位。直接定位法無需估計中間參數,故信息利用高,損失較少,可獲得更好性能,尤其是在低信噪比時優于兩步定位法[16-18],因此逐漸成為定位領域的研究熱點[19-22]。
Tirer等[23]和Wu等[24]研究了窄帶信號源的直接定位,然而外輻射源雷達系統常用的信號為寬帶信號,因此并不適用。Ma等[25]研究了寬帶信號源的直接定位法,但是需要多個接收站聯合進行定位。Weiss[26]研究了接收站和寬帶信號源之間存在相對運動時的直接定位法,可用于單個接收站場景,但是其所用的信號源受到一定的約束。Ma等[27]所提算法雖然代價函數不受信號形式的限制,但是未知的發射信號會帶來性能下降問題。除此之外,針對正交頻分復用(orthogonal frequency division multiplexing, OFDM)信號、非圓信號等特殊信號,也有學者展開相關研究。然而這些研究均是基于OFDM信號的特點,因此適用范圍往往受到限制[28-29]。
本文在基于合作式無人機的發射站兩步定位方法[12]基礎上,提出了一種發射站直接定位法。該方法利用了外輻射源雷達同時接收直達波和目標回波的特性,將航跡信息已知的合作式無人機作為探測目標,并利用接收到的發射站直達波信號代替發射信號,減少了發射信號未知帶來的性能下降問題。另外,還分析了該場景下的克拉美羅下界(Cramer-Rao lower bound, CRLB),并將其作為衡量算法性能的參考標準。仿真結果表明,該方法不僅優于兩步定位法,且優于文獻[27]中信號未知時的直接定位方法。
1 信號模型
考慮如下外輻射源雷達工作場景:一個靜止的發射站(位置坐標為u=[x(t),y(t)]T)發射未知寬帶信號,靜止接收站(位置坐標為q=[x(r),y(r)]T)可通過監測通道和參考通道分別接收來自目標的反射信號和來自發射站的直達波信號,接收站對反射信號進行了K次觀測。若觀測間隙較短,每個觀測間隙內目標的位置和速度可以認為是固定的。設第k個觀測間隙目標的位置為pk=p+(k-1)Tv。其中,p為目標初始位置,v為目標運動速度,T為每個觀測時隙的時間長度。則目標回波信號經過下變頻后,可表示為
rk(t)=αks(t-τk)ej2πfkt+nk(t), 0≤t≤T
(1)
式中:s(t)是發射信號;αk是第k個觀測間隙的信道復響應;nk(t)是零均值的復高斯白噪聲。設τk?T,式(1)中時延τk和多普勒頻率fk為
(2)
(3)

式(1)表示的是一個發射信號未知時的直接定位問題,而當發射信號已知時,其定位性能遠高于發射信號未知時的情形[27]。由于發射信號可以通過參考通道獲取,因此用來自參考通道的直達波信號代替發射信號,此時式(1)的目標回波信號可改寫為
(4)
(5)
式(3)中的頻移和式(5)中的時延不僅包含發射站位置信息,也包含目標的位置和速度信息,因此將已知位置和速度信息的合作式無人機作為探測目標,則目標回波信號中只包含信道響應和發射站位置兩個未知參數。
對每個觀測間隙內接收到的目標回波進行N次快拍采樣,采樣間隔為Ts,則第n個采樣時刻的回波信號可以表示為如下形式:
(6)
其中,
(7)
將接收的目標回波信號、直達波信號和采樣脈沖分別定義為如下向量:
(8)
那么式(6)的向量形式為
rk=αkFkAksk+nk
(9)
式中:Fk是移位矩陣;Fksk表示將sk位移τk/Ts。發射站定位問題即是從已知的目標回波信號和直達波信號中估計出發射站位置。
2 直接定位法
根據式(9)所示的信號模型,噪聲nk服從高斯分布,此時極大似然估計等價于最小二乘估計,因此發射站的位置可以通過最小化如下代價函數得到:
(10)
(11)
將式(11)代入式(10)中可得
(12)
(13)
其中
(14)
(15)
由此得到發射站位置估計值為
(16)
基于上述對方法原理的推導分析,本文所提直接定位方法的主要步驟可總結如下。
步驟1在目標信號源可能存在區域內合理劃分網格節點:u1,u2,…,ug,…,uG。
步驟2令g=1,根據式(3)、式(5)和式(8)分別計算網格ug在每個觀測間隙內到各觀測站的時延矩陣Fk(ug)和多普勒頻移矩陣Ak(ug)。
步驟3根據式(14)和式(15)計算每個觀測間隙內包含時延和多普勒頻移的位置信息矩陣Qk(ug)。
步驟4根據式(13)求得代價函數值L1(ug)。
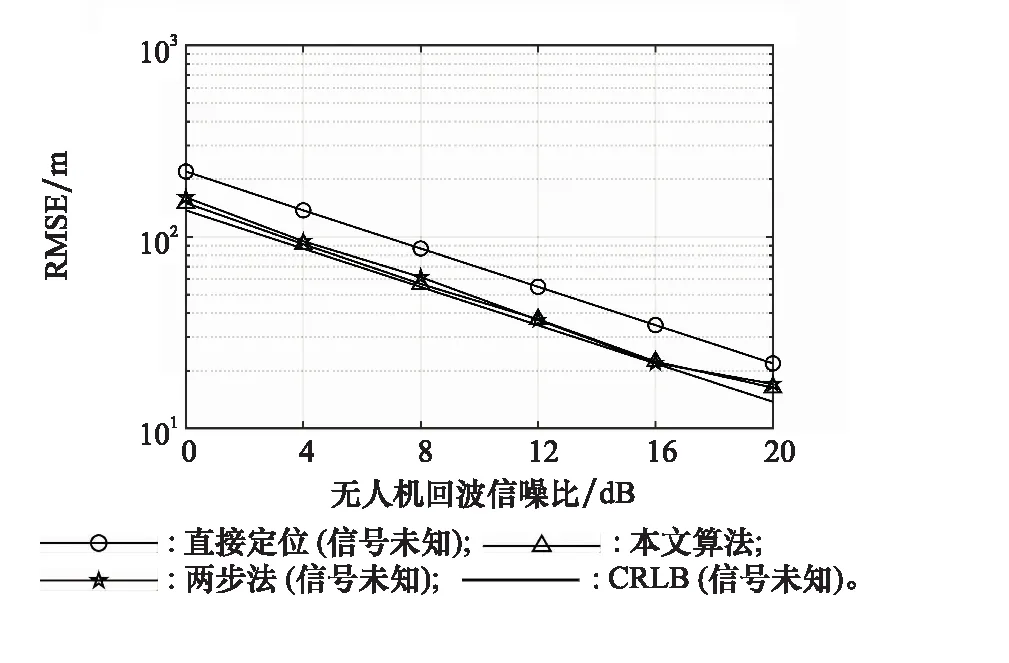
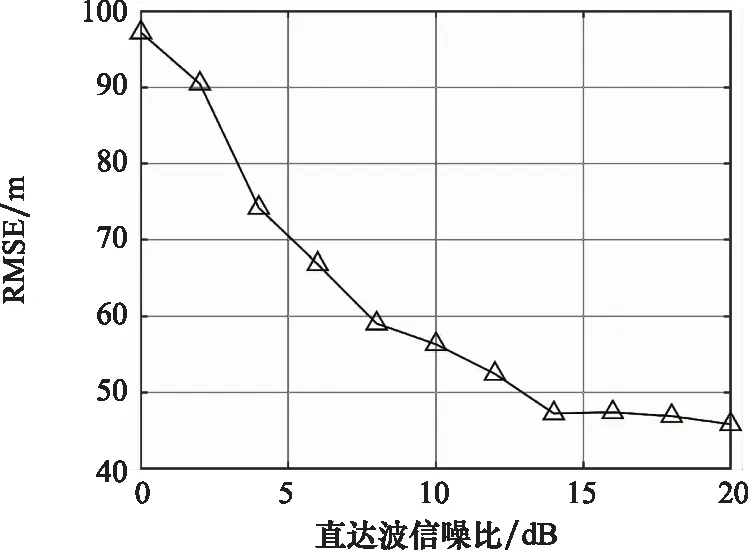
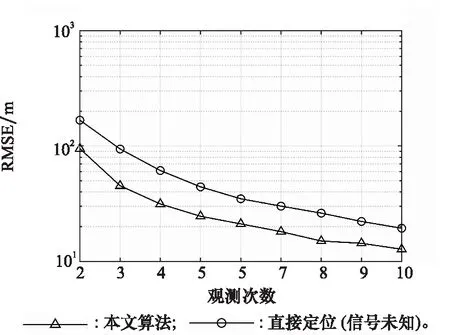
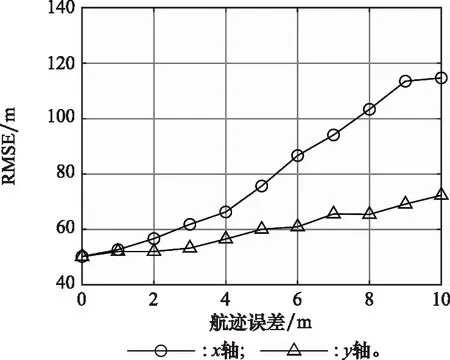
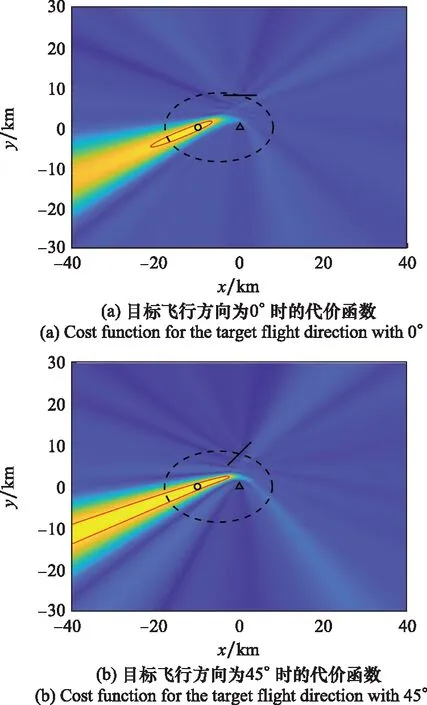
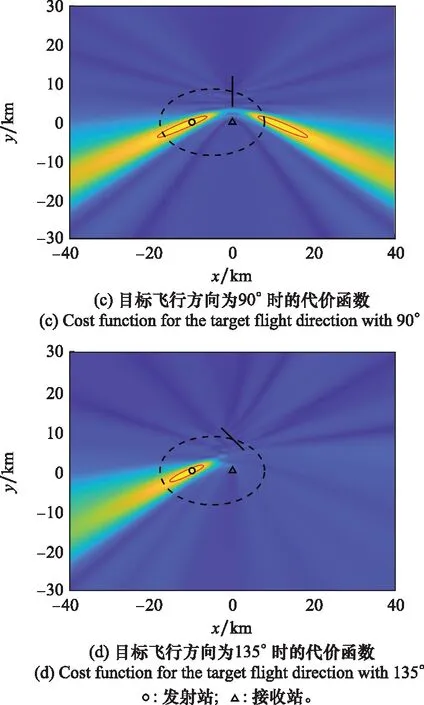
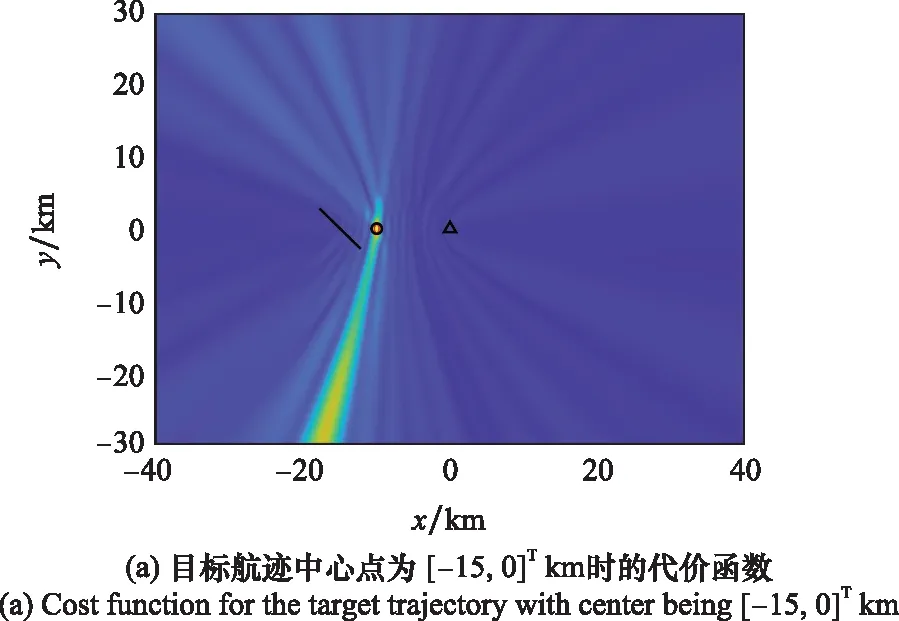
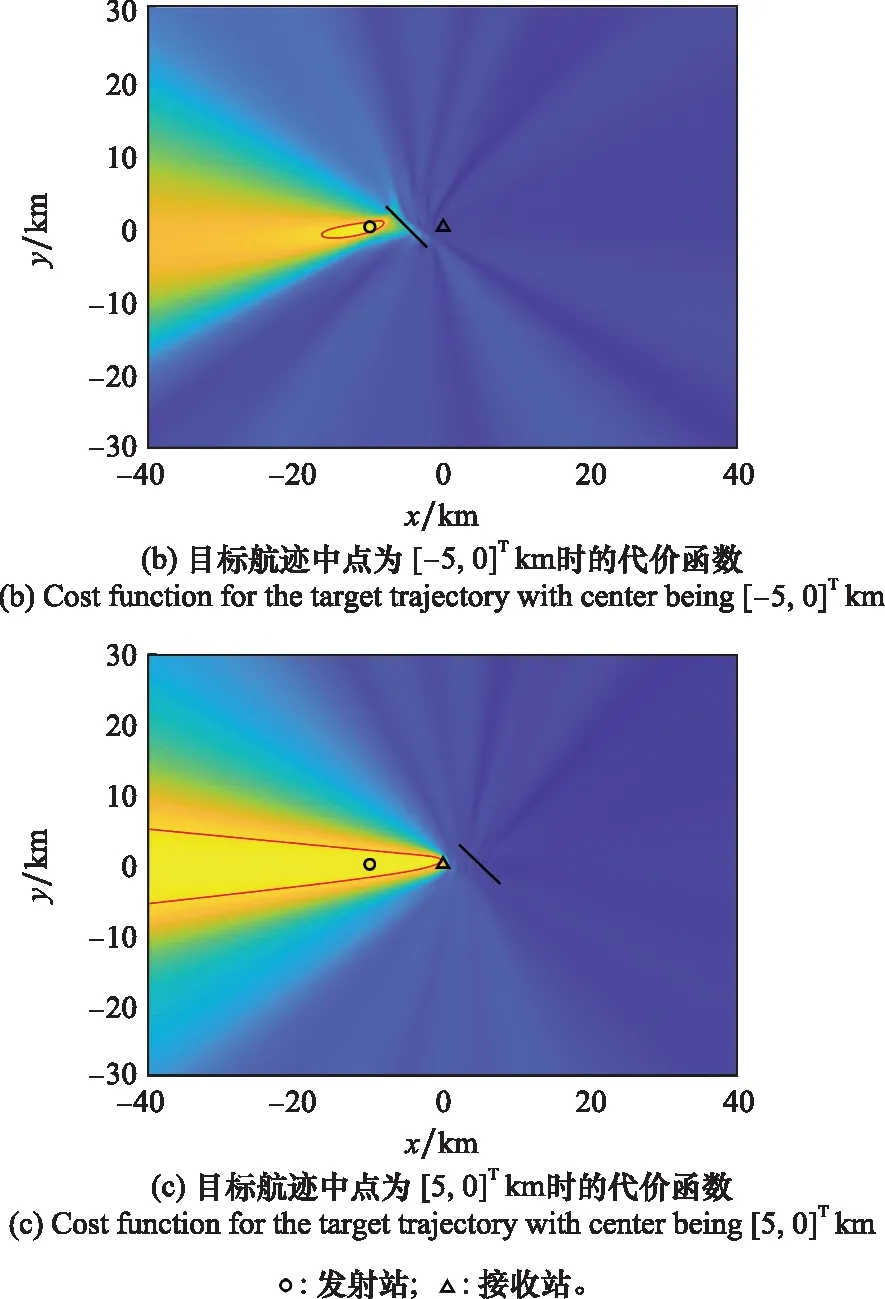
步驟5若g 本節將分析信號發射站位置估計的CRLB。首先根據式(9),可得到接收信號的平均值mk為 mk=αkFkAksk (17) 定義如下向量: (18) (19) 確定完整的Fisher信息量: (20) 其中 (21) 發射站位置估計的CRLB[30]可以表示為 (22) 其中Fisher量的元素[31]可表示為 (23) (24) (25) 其中, (26) (27) (28) (29) (30) 則 (31) (32) (33) (34) 則 (35) (36) 最后,將式(24)、式(25)、式(35)、式(36)代入式(23)可以得到Fisher量的元素,最后再代入分塊矩陣式(20)即可求得完整的Fisher信息量,由此可得出發射站位置估計的CRLB。 為了驗證所提出算法的定位性能,下面進行仿真分析。仿真設置如下:發射站位置固定為u=[-10,0]Tkm,向外發射載頻為762 MHz的地面數字多媒體廣播(digital terrestrial multimedia broadcast, DTMB)信號,信號帶寬為8 MHz。接收站位置固定為q=[0,0]Tkm,無人機的初始位置為p=[-4,8]Tkm,以飛行速度20 m/s向x軸正方向飛行。接收站對無人機共進行了9次觀測,每次觀測間隔內無人機飛行距離為1 km。采用蒙特卡羅實驗的方法將本文所提算法與文獻[27]中信號未知時的直接定位算法及文獻[12]中基于合作式無人機的兩步法進行對比,并用均方根誤差(root mean square error, RMSE)衡量算法性能。RMSE定義如下: (37) 式中:N是蒙特卡羅實驗次數,N=1 000;ui是第i次獨立實驗中發射站位置估計值。 首先,研究在不同無人機回波信號信噪比下,各種不同定位算法的定位精度。假設直達波信號信噪比為20 dB,無人機回波信號信噪比為0 dB到20 dB,其仿真結果如圖1所示。從圖1可以看出,隨著無人機回波信號的信噪比增加,所有算法定位精度都隨之提高,但本文所提算法定位精度優于信號未知時的直接定位算法及信號已知時的兩步定位法,其性能接近信號已知時定位精度的克拉美羅界。同時也可看出,若發射信號已知,則對于定位性能較信號未知時會有較大的提升。 圖1 不同定位算法精度比較Fig.1 Accuracy comparison of different localization algorithms 一般而言,外輻射源雷達所獲取的直達波信號并非純凈的,而是會包含噪聲信號。為了研究直達波信號噪聲對本文算法的影響,假設無人機反射回波信號的信噪比固定為10 dB,直達波信號信噪比為0 dB到20 dB,此時本文算法性能如圖2所示。由圖2可見,隨著直達波信號信噪比的提升,算法性能也會隨之提升。 圖2 所提算法的RMSE隨直達波信號信噪比變化曲線Fig.2 Variation curve of RMSE with the signal to noise ratio of the direct wave signal for the proposed algorithm 其次,研究定位性能與觀測次數的關系。在直達波信噪比為20 dB,無人機回波信噪比為20 dB時,觀測次數為2~10次之間的定位結果如圖3所示。由圖3可見,隨觀測次數增加,兩種算法定位精度都隨之增加,本文算法相對信號未知時的直接定位算法性能更優。 圖3 兩種算法的RMSE與觀測次數的關系Fig.3 RMSE of two algorithms under different interception intervals 無人機的航跡信息可由GPS獲得,但是這些信息往往會存在誤差,因此本文將研究這些誤差對算法性能的影響。仿真參數設置如下:仿真設置如下,發射站位置為u=[-10,0]Tkm,接收站位置為q=[0,0]Tkm,無人機的初始位置為p=[-4,8]Tkm,以飛行速度20 m/s向x軸正方向飛行。接收站對無人機共進行了9次觀測,每次觀測間隔內無人機飛行距離為1 km,目標回波信號與發射站直達波信號信噪比均為10 dB。假設獲得的無人機航跡與實際的無人機航跡在x軸或y軸方向存在一定的偏差,則圖4展示了存在誤差時算法的性能。由圖4可知,隨著航跡誤差的增大,本文算法性能也隨之下降。 圖4 所提算法的RMSE隨無人機位置誤差變化曲線Fig.4 Variation curve of RMSE with unmanned aerial vehicle position error for the proposed algorithm 然后,進一步研究不同無人機飛行方向對代價函數的影響。假設無人機的航跡與x軸正方向所形成的夾角即為無人機的飛行方向,無人機分別沿著0°、45°、90°、135° 這4個方向以速度20 m/s飛行,4條航跡長度固定為8 km且航跡中心點均為p=[0,8]Tkm,接收站對無人機共進行了9次觀測,每次觀測無人機移動1 km。代價函數仿真結果如圖5所示。其中,黑色圓形和三角形分別表示發射站和接收站,黑色虛線表示無人機處于航跡中心點時的雙基距離,黑色實線和紅色實線分別表示無人機航跡和代價函數等高線。 圖5 不同飛行方向時的代價函數Fig.5 Cost function for different flight directions 由圖5可知,無人機飛行角度為135°時,紅色等高線包圍的區域最小,則定位性能最高。而當無人機飛行角度為90°時,會出現定位模糊。 最后,研究無人機相對于發射站和接收站的飛行位置對代價函數的影響。假設無人機飛行角度為135°,分別按照3條不同的航跡以速度大小為20 m/s飛行,3條航跡長度固定為8 km且航跡中心點分別為[-15,0]Tkm、 [-5,0]Tkm和[5,0]Tkm,其他條件不變。代價函數的仿真結果如圖6所示。從圖6可見,無人機在背離接收站的位置飛行時,定位性能最好。 圖6 不同相對飛行位置時的代價函數Fig.6 Cost function for different relative flight positions 本文針對外輻射源雷達系統中發射站快速定位問題,提出了以無人機作為合作目標,采用直接定位對發射站進行定位信息獲取的方法。并針對常規直接定位方法在信號形式未知帶來的性能下降問題,將直達波信號作為已知發射信號,不僅可以得到較常規直接定位方法和兩步定位法相對更好的性能,而且其定位精度逼近CRLB。當接收信號信噪比和觀測次數增加,其定位精度也隨之增加。同時,合作目標相對于收發站位的飛行方向和位置對定位性能也有不同影響,這對于實際應用具有較好的參考意義。仿真結果驗證了所提方法的優越性。
3 定位方法性能分析





4 仿真實驗與分析
4.1 仿真1:不同定位算法性能比較
4.2 仿真2:信號參數對算法性能影響
4.3 仿真3:無人機航跡對算法性能影響
5 結 論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06