GPT3模型中國區域大氣剖面應用精度分析
2023-02-02 08:12:50王來順劉建忠張寅寶
測繪工程 2023年1期
王來順,劉建忠,張寅寶
(鄭州大學 地球科學與技術學院,鄭州 450001)
全球導航衛星系統( global navigation satellite system,GNSS) 信號穿過中性大氣時,會受大氣折射影響產生延遲,在天頂方向被稱作對流層天頂延遲(zenith total delay,ZTD)。在GNSS測量中,ZTD是一個十分重要的誤差源[1],也是GPS氣象學重要研究對象[2]。ZTD由干延遲和濕延遲兩部分組成,并可以通過兩者相應的映射函數投影到任意信號傳播路徑上[3]。為模型化ZTD,學者們通過分析電磁波在大氣中傳輸過程,基于實測氣象數據建立對流層延遲經驗模型[4]。常見的對流層延遲改正模型大致分為兩類:氣象參數模型和非氣象參數模型。其中氣象參數模型包括傳統的Hopfield模型[5]和Saastamoinen模型[6]等。此類模型在確定ZTD時精度較高,可達cm級[7],但該類模型高度依賴實測氣象參數,若采用標準大氣氣象參數,其改正效果較差[8],極大限制模型的使用。非氣象參數模型包括EGNOS、UNB系列、GPT系列等模型[9-11]。此外,李薇[8]利用IGS站提供的高精度對流層天頂延遲時間序列和 NCEP 大氣資料建立IGGtrop模型;姚宜斌[7]利用GGOS Atmosphere資料提供的全球天頂對流層延遲格網時間序列研究了全球對流層天頂延遲的時空變化特征,在此基礎上使用球諧函數對相關參數進行建模,建立GZTD模型。這些模型都是直接對ZTD進行分析建模或對氣象參數進行分析建模,均不依賴氣象參數,僅需測站位置信息和年積日即可實時計算ZTD值。中國區域地形氣候較為復雜,例如在部分區域,測站與參考面之間的高程差異甚至超過2 km[12],因此許多全球適用的模型應用于中國區域時,難以取得理想的精度,例如,利用2015年的探空資料,GPT2w模型Tm的全球均方根誤差(root mean square,RMS)為3.82 K,而其在中國區域為4.43 K[13-14]。此外有新研究指出經驗模型不應當僅適用于地表,文獻[15]討論了經驗模型在整個大氣剖面的應用精度。我國幅員遼闊,地形地貌復雜,氣候系統變化多樣,氣象探空站點分布極不均勻,對流層延遲模型在不同區域精度也會有所不同[16]。鑒于GPT3(global pressure and temperature3,GPT3)是目前公開精度較高的對流層延遲模型,且尚未有文獻利用Radiosonde數據討論其應用于整個對流層剖面的精度,文中基于中國2011—2020年的Radiosonde數據,就GPT3得到的幾個氣象參數在地表至11 km的應用精度展開分析,為進一步改善模型提供參考。
1 GPT3模型與探空數據簡介
1.1 GPT3模型
GPT系列模型是目前較為熱門的對流層經驗改正模型,包括GPT、GPT2、GPT2w和GPT3[10,11,17,18]4種產品。與GPT2w相比,GPT3增加了梯度模型,改良了映射函數關系,從而有效克服了低高度截止角時引起的映射函數誤差[19]。GPT3將全球劃分為1°×1°的格網,在每個格網點基于最小二乘法,式(1)擬合各個參數的年周期和半年周期。
(1)
式中:A0表示參數均值;A1和B1表示年振幅;A2和B2表示半年振幅。使用模型時,通過輸入經緯度,搜索測站周圍4個格網點,調用相應函數,計算出格網點參數值,經高程歸化后,線性內插至測站處,即可計算任意位置P、T、E、Tm等所需分析的大氣參數值,其計算簡單且精度較高,廣泛應用于GNSS測量等領域。
1.2 數據源及方法
探空數據是最常見的大氣探測手段,理想條件下,經過校準的無線電探空大氣溫度數據精度為±0.5 ℃,相對濕度精度為±5%[20]。美國國家氣候數據中心的全球站點無線電探空資料數據集(the integrated global radiosonde archive,IGRA)(https://www.ncei.noaa.gov/products/weather-balloon/integrated-global-radiosonde-archive)常用于氣候分析[21-24]。由于IGRA為直接觀測數據,故常用其來對其它數據進行精度評定。文中利用IGRA提供的2011—2020年中國區域82個無線電探空站在各探測高度的氣象參數,以此為精確值分析GPT3模型得到的氣壓(GPT3-P)、氣溫(GPT3-T)、水汽壓(GPT3-E)和加權平均溫度(GPT3-Tm)在中國區域地表至11 km對流層剖面的精度,得出其誤差的時空分布規律,為進一步精化該模型在中國區域的應用提供參考。
文中采用平均偏差(Bias)、RMS和標準差(Standard Deviation,STD)作為精度評判標準,具體計算見式(2)。
(2)
其中,Bias表示模型與真值的偏離程度,反映模型系統偏差;RMS表示精度,用于衡量模型穩定性及可靠性;STD反映樣本離散程度,表示隨機誤差。
為剔除Radiosonde數據中的粗差,采用如下條件選取數據:
1)從地表起,連續、有效探測水汽壓的層數不小于12層;
2)連續、有效探測的頂層水汽壓不大于0.015 hPa。
通過以上條件,篩選出中國區域的82個測站供模型驗證。
2 GPT3模型精度分析
圖1繪出2020年7月3日T12:00武漢站分別由GPT3模型和Radiosonde得出的P、T、E和Tm在各個探測高度的值。
由圖1可知,GPT3模型考慮了P和E隨高程的指數遞減規律,并假設T隨高程線性遞減。但GPT3模型未考慮Tm的高程遞減特性。比較Radiosonde和GPT3模型的廓線,可看出在低高程面各參數估計精度較高,但隨著高程增加,整體估計精度都有所降低。其中E在2~4 km區間變化復雜,在6 km以上,接近于0。由于Tm未考慮高程改正,隨著高程增加,其誤差急劇增大。

圖1 2020年7月3日T12:00武漢站 GPT3模型和Radiosonde廓線圖
為分析GPT3在中國區域應用于地表至11 km大氣剖面精度,表 1分別計算了GPT3的P、T、E和Tm在地表和地表至11 km大氣剖面的精度,如表1所示。
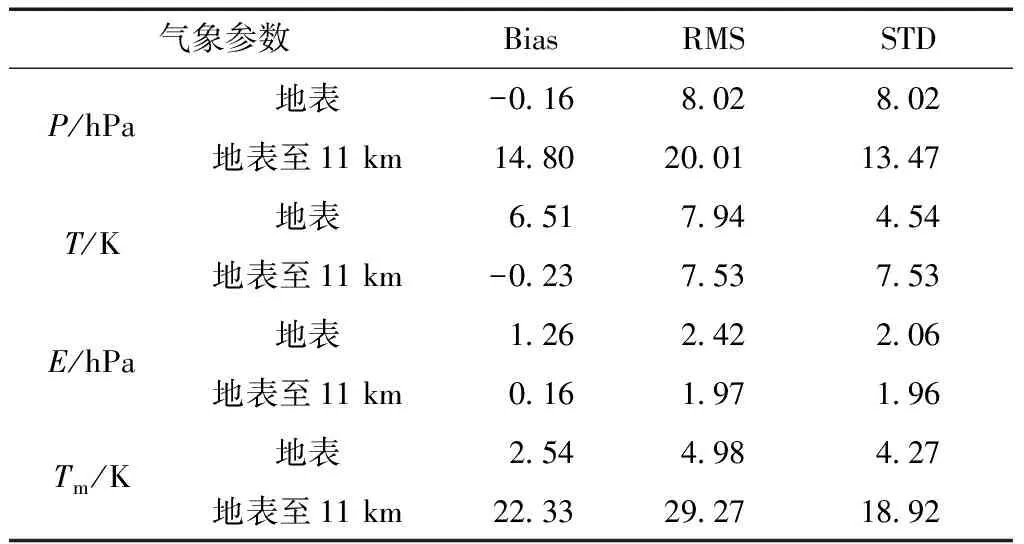
表1 GPT3模型中國區域地表及地表至11 km剖面精度統計表
表 1顯示,GPT3-P、GPT3-T和GPT3-Tm的地表RMS比應用于11 km以下大氣剖面時小,但GPT3-E卻呈現相反的現象,其原因可能是隨著高度增加,大氣水汽含量急劇減少并接近于0,故表現出GPT3-E的RMS較小。但整體而言,GPT3模型在11 km以下的大氣剖面的應用精度,小于其應用于地表時。文中基于中國2011—2020年的Radiosonde數據,就GPT3模型得到的幾個氣象參數在地表至11 km的應用精度展開分析。
2.1 GPT3模型精度的地理分布分析
利用Radiosonde數據分析GPT3得出的4個氣象參數在地表至11 km應用精度的空間分布,并結合實驗與文獻[4]將研究區域按15°~30°N,30°~40°N和40°~55°N分為3個區間,定量分析其精度的空間變化規律。
2.1.1 GPT3-P精度空間分析
繪出各測站GPT3-P的Bias、RMS及STD分布如圖2所示。

圖2 各Radiosonde站地表至11 km的GPT3-P精度分布圖
圖2(a)可看出,GPT3-P的Bias在7.36~ 26.35 hPa之間,說明模型存在明顯高估現象,其地理分布整體由北向南逐漸減小。Bias最大值為26.35 hPa,位于重慶市,其經緯度和高程分別為29.60°N,106.40°E和541.10 m。分析原始數據,重慶站觀測記錄僅有19條,可能存在較大誤差。Bias在20 hPa以下的測站有73個,占89%;GPT3-P的RMS在10.40~ 29.24 hPa之間。RMS較大的測站多見于中國北部地區。除重慶站外,RMS最大的測站位于41.72°N,82.95°E,1 083.5 m,其值為27.91 hPa。RMS在25 hPa以下的測站有64個,占78%;而RMS在25 hPa以上的測站有 12個在40°N以北。STD最大為22.00 hPa,位于23.90°N,106.60°E,177 m。STD在20 hPa以下測站共有81個。
按3個緯度區間定量分析,結果如表 2所示。
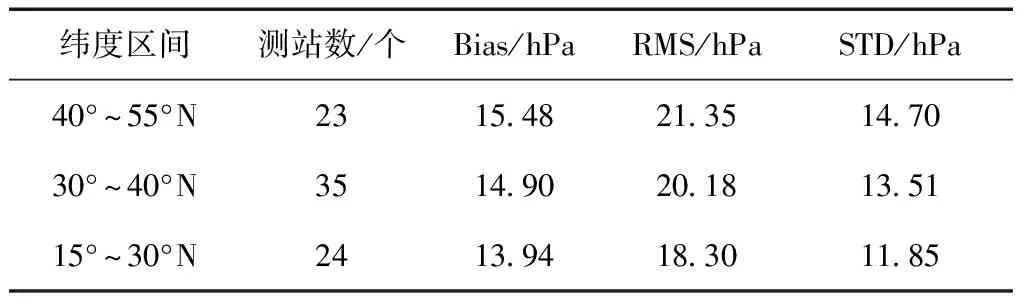
表2 3個緯度區間GPT3-P的精度表
由表2得出,GPT3-P的Bias、RMS和STD都呈現出高緯度地區差而低緯度地區精度較高的空間分布,這與圖2反映的規律一致。
2.1.2 GPT3-T精度空間分析
圖3繪出各探空站GPT3-T誤差分布。

圖3 各Radiosonde站地表至11 km的GPT3-T精度分布圖
圖3(a)表明,GPT3-T的Bias在-6.99~13.26 K之間,其中正偏差較大的測站多見于西北內陸,而負偏差較大的測站則多見于低緯度地區。Bias在-6~6 K之間的測站共有66個,占總體80%。其中正Bias最大的測站值為13.26 K,位于新疆民豐,坐標為37.07°N,82.72°E和1 409 m;負Bias最大的測站值為-6.99 K,位于三亞。RMS和STD最大的測站均為大連站,分別為32.62 K和31.00 K。除大連站外,RMS和STD最大值分別為20.00 K和19.79 K,位于青島。RMS在10 K以下的測站有65個,占79%。RMS大于10 K的17個測站中有10個位于30°~40°N之間,其余位于40°~55°N之間。STD在10 K以下的測站有 77個,其誤差的空間分布與RMS類似。
將各測站按緯度劃分3個區間,統計結果如表3所示。
由表3可以看出,GPT3-T的Bias在30°~40°N 區間最小,僅為-0.05 K,但其RMS和STD在該區間卻取得最大值,在15°~30°N區間精度最高,這同樣和圖3反映的結論一致。
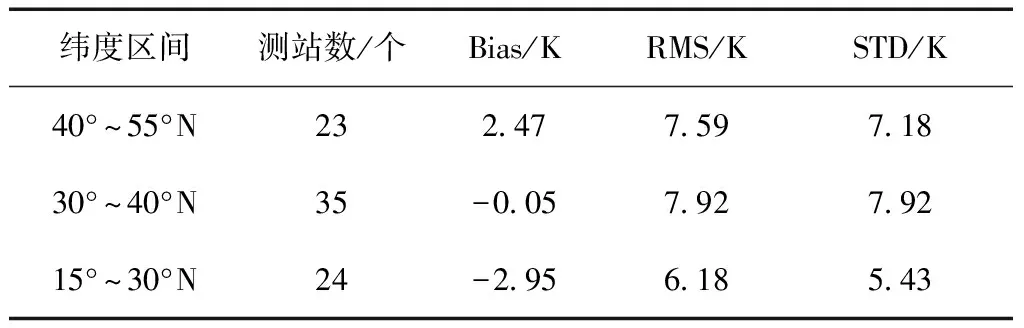
表3 3個緯度區間GPT3-T的精度表
2.1.3 GPT3-E精度空間分析
GPT3-E誤差分布如圖4所示。
圖4表明,GPT3-E的Bias在-0.29~2.24 hPa之間,在-0.50~0.50 hPa之間的測站共有65個,占79%。最大正Bias為2.24 hPa,坐標為23.80°N,114.73°E,61 m,位于廣東河源。RMS和STD的最大值分別為4.79 hPa和4.23 hPa也都位于河源站。RMS在3 hPa以下的測站有79個,在2 hPa以下的有53個,分別占96%和65%。整體而言RMS的分布由西北向東南逐漸增大,可能是因為東南方水汽豐沛,變化劇烈,難以建模的原因。STD的空間分布與其RMS類似。
3個緯度區間的精度統計值如表4所示。
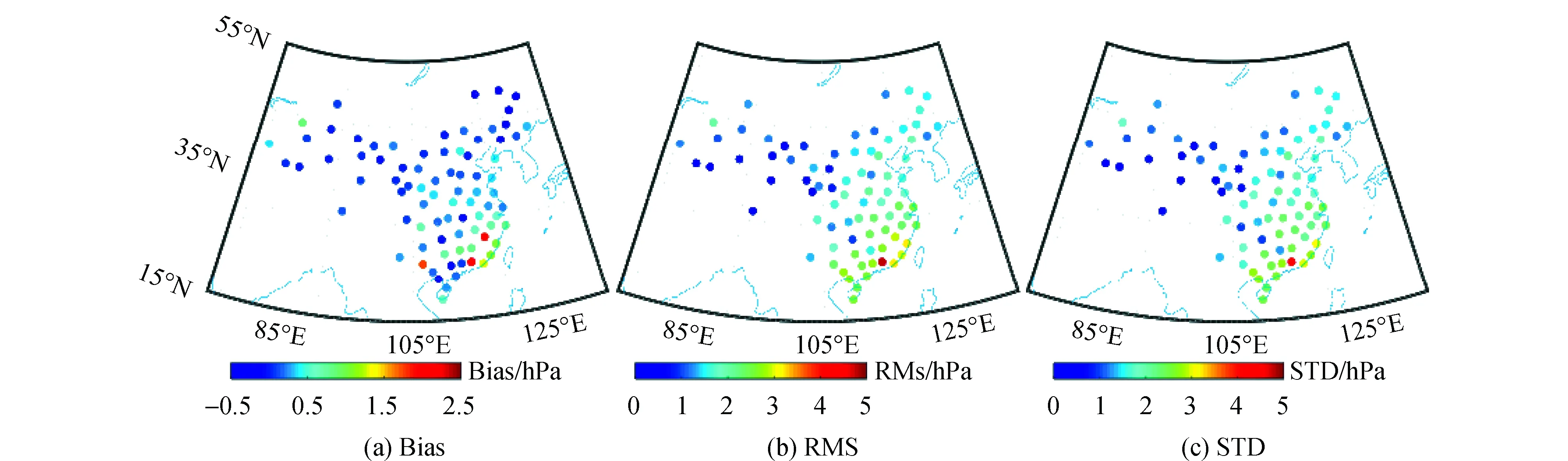
圖4 各Radiosonde站地表至11 km的GPT3-E精度分布圖

表4 3個緯度區間GPT3-E的精度表
表4顯示,40°~55°N區間Bias為0.04 hPa,表明模型沒有明顯系統誤差,但另兩個區間的Bias都為正值,表明GPT3-E存在高估現象。GPT3-E的Bias、RMS和STD都隨著緯度的減小而增加。
2.1.4 GPT3-Tm精度空間分析
GPT3-Tm的Bias、RMS及STD的分布如圖5所示。
由于GPT3-Tm未考慮Tm高程改正,因此應用于地表至11 km時,其Bias值在14.41~30.34 K之間,模型存在普遍高估現象。就其空間分布而言,在西北內陸和東南沿海都存在Bias較大的測站。RMS在22.30~38.54 K之間,而STD在13.21~24.22 K之間,RMS和STD較大測站也見諸于西北和東南沿海地區。GPT3-Tm精度表明,GPT3-Tm模型僅適用于地表,不適用于高空。
分3個緯度區間精度統計結果如表5所示。

表5 3個緯度區間GPT3-Tm的精度表
由表5得出,由于未考慮高程改正GPT3-Tm在各維度區間的精度都較差,以至于其空間分布規律不明顯,在精化GPT3-Tm模型時需要充分考慮其高程改正。
2.2 GPT3模型不同高程的精度分析
為進一步分析GPT3在不同高程區間的應用精度,本節在3個緯度區間內,將11 km以下大氣劃分為9個區間,分別分析各個氣象參數精度變化規律。
2.2.1 GPT3-P不同高程精度分析
GPT3-P在3個緯度區間不同高程精度統計如表6所示。
表6可看出,GPT3-P在1 km以下區間內,在30°~40°N的Bias最小,為1.28 hPa,而在30°N以南區間最大,為4.14 hPa。在1~2 km區間,30°~40°N的Bias最大,在30°N以南區間最小,為
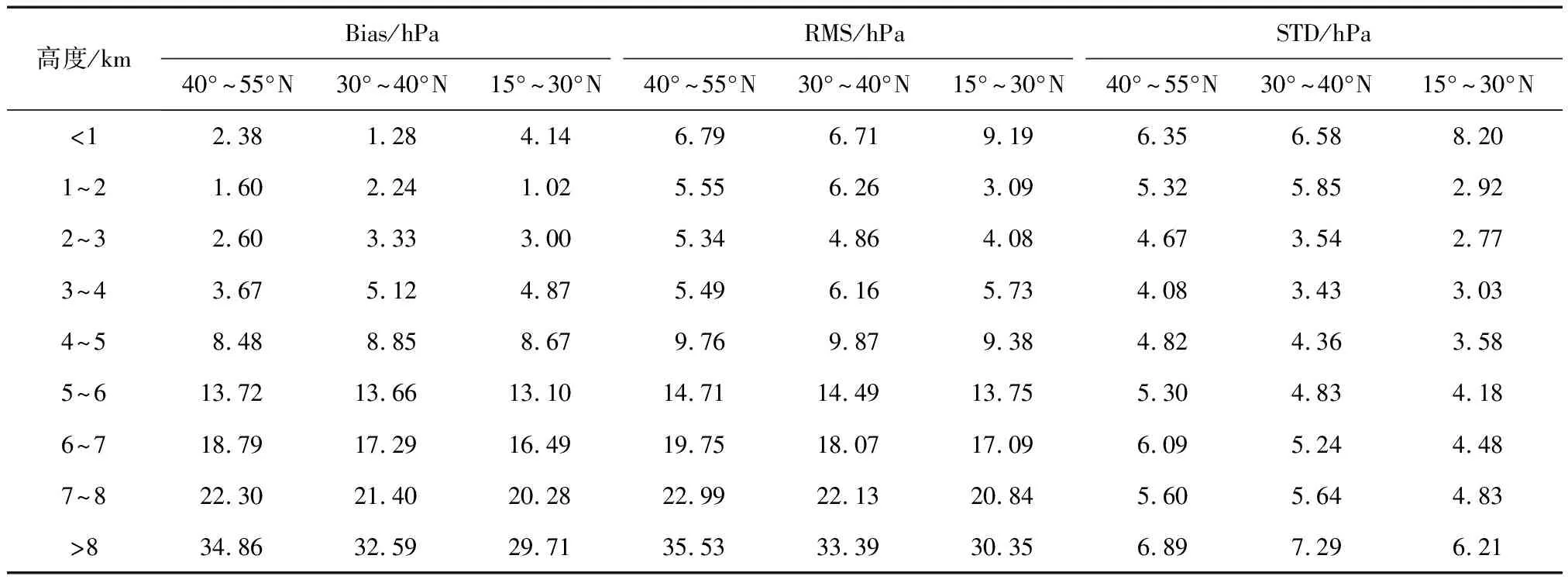
表6 GPT3-P 3個緯度區間不同高程的精度統計表
1.02 hPa。在海拔3 km以上,各區間Bias均隨海拔高度增加而增大,在海拔5 km以上,40°~55°N的Bias最大,在15°~30°N區間最小。
1 km以下RMS在區間30°~40°N最小,最大在15°~30°N。在1 km以上,15°~30°N的RMS反而在各區間中最小。30°N以北兩個區間都在2~3 km內最小。在5 km以上30°~40°N區間的RMS最大。在2 km以上,各區間RMS都呈現隨高程增加而增加的趨勢。STD變化規律與其RMS類似。
2.2.2 GPT3-T不同高程精度分析
GPT3-T精度統計如表7所示。
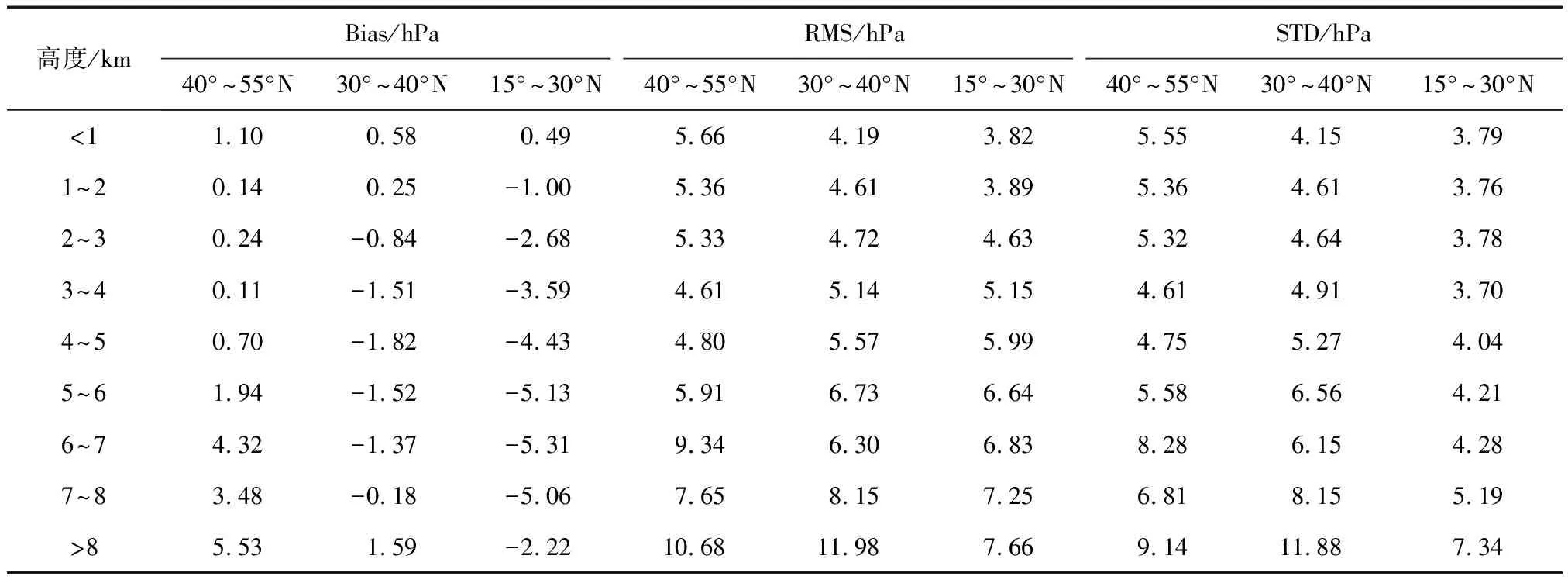
表7 GPT3-T 3個緯度區間不同高程的精度統計表
由表7可得,40°~55°N的Bias在各個高程段都為正值,且在3~4 km內取得最小值0.11 K,在4 km 以上,其Bias隨海拔高度增加而增大。30°~40°N的Bias變化復雜,在2 km以下為正值,在2~8 km區間為負值,在8 km以上又為正。其Bias絕對值最大高程段為4~5 km之間。
總體而言,各區間GPT3-T的RMS都隨著海拔高程的增大而增大。在海拔3 km以下以及7 km以上,15°~30°N區間的RMS最小;但在3~6 km之間40°~55°N區間的RMS最小;15°~30°N區間的RMS在6~7 km之間取得最小值。
在各高程區間,15°~30°N的STD都較其他兩個緯度區間小。在3 km以下,30°~40°N的STD小于40°N以北的區間,但在3 km以上卻呈現出相反規律。各區間GPT3-T的STD也都隨海拔高度升高而增大。
2.2.3 GPT3-E不同高程精度分析
表8統計了GPT3-E在3個緯度區間不同高程的精度。
由表8可知,在海拔3 km以下,30°~40°N的Bias為正值表明GPT3-E在該緯度和高程區間存在高估現象,但在其他兩個區間為負值。在4 km以上,所有緯度區間的Bias都為正。在3~6 km之間,40°N以南兩個區間Bias都隨海拔升高而增大,但在6 km以上并不存在這種趨勢。整體而言15°~30°N區間Bias絕對值在各個高程區間都取得最大值。
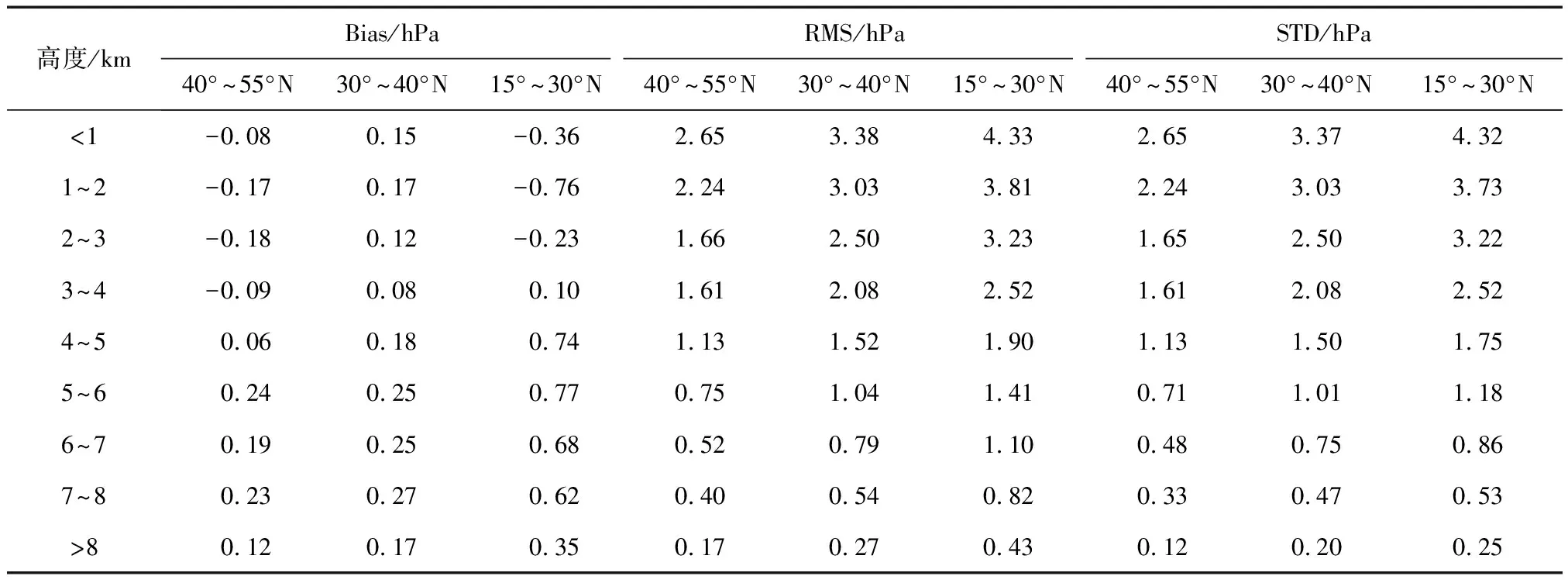
表8 GPT3-E 3個緯度區間不同高程的精度統計表
其RMS都隨海拔升高而減小,且緯度越小,RMS越大,可能因為中國南方水汽豐沛且變化較大,難以建模;同時高海拔大氣水汽含量較少,也導致了其絕對RMS較小。STD與其RMS變化趨勢相同。
2.2.4 GPT3-Tm不同高程精度分析
GPT3-Tm在3個緯度區間不同高程的精度如表9。
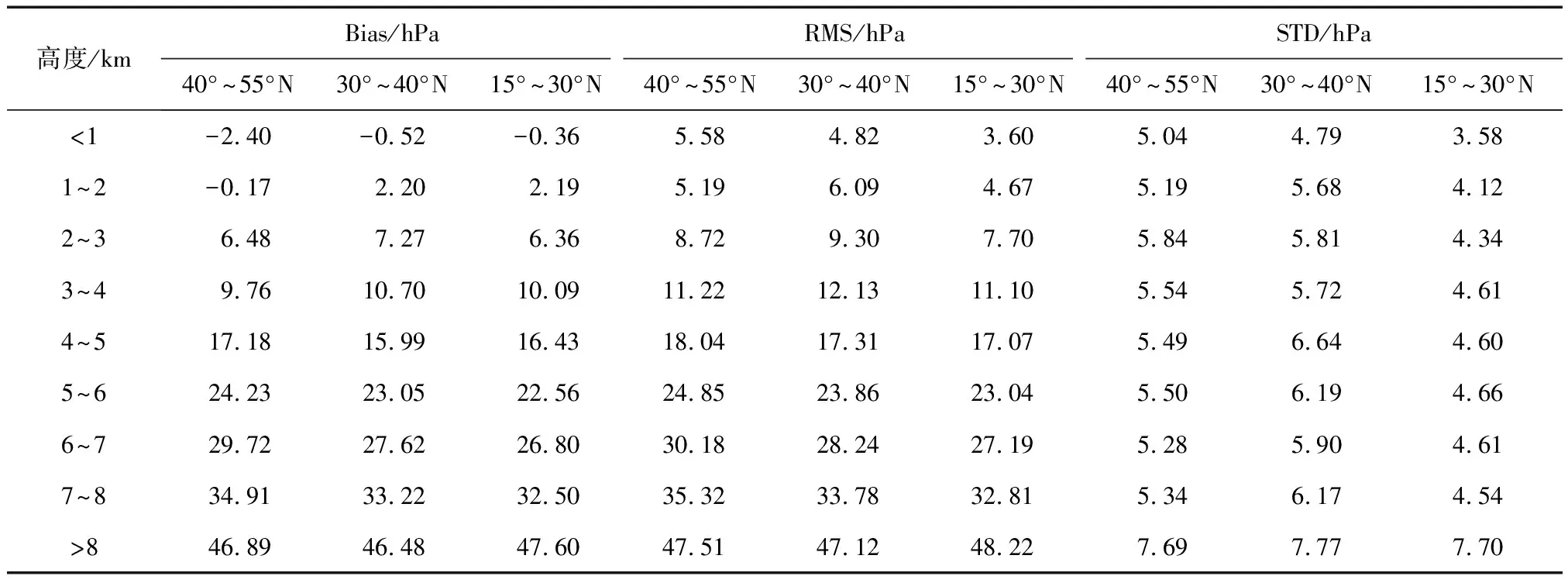
表9 GPT3-Tm 3個緯度區間不同高程的精度統計表
表9可看出,由于未考慮高程改正,GPT3-Tm的Bias、RMS和STD都隨高程升高而增大。GPT3-Tm各緯度區間不同高程段的STD遠小于其RMS,說明模型隨機誤差較小。各高程段都表現出低緯度區間精度較高的空間分布規律。因此在進一步精化GPT3-Tm時要充分研究其高程改正規律。
除GPT3-E外,其他各氣象參數總體都表現出低海拔的精度優于高海拔的現象,這說明GPT3模型的高程改正方法還有待進一步精化。
2.3 GPT3模型精度時間序列變化分析
為研究GPT3模型精度時間變化規律,本節就GPT3得到的4個氣象參數在地表至11 km應用精度的時間序列變化展開分析。
2.3.1 GPT3-P精度時間序列變化分析
圖6顯示GPT3-P日均Bias、RMS和STD變化。
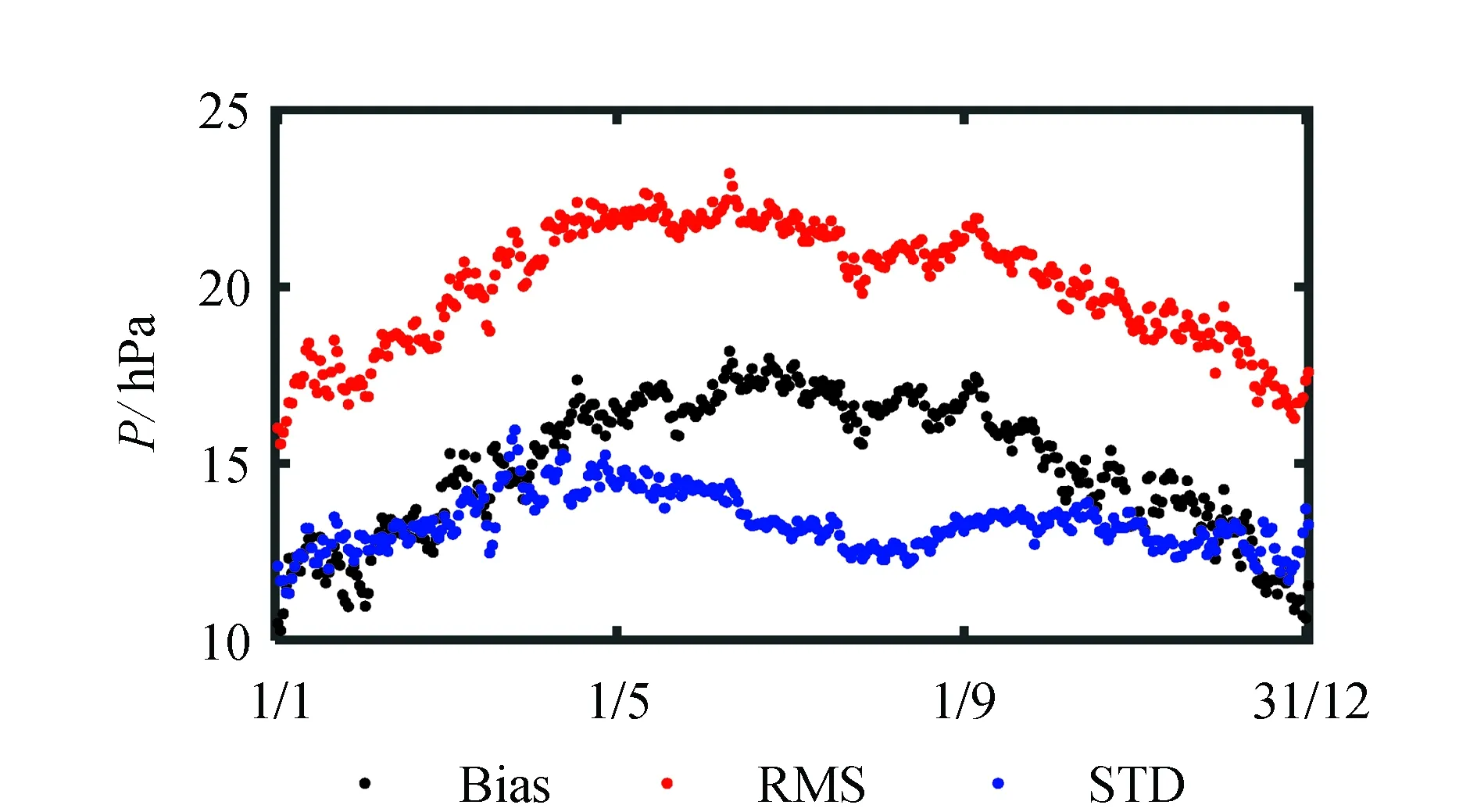
圖6 地表至11 km的GPT3-P日均Bias、RMS和STD變化
由圖 6得出,GPT3-P日均Bias均在10 hPa以上,說明模型估值偏高;日均RMS分布在20 hPa附近,整體表現為1—5月上升、5—12月下降的趨勢,呈現出一定的季節特性;其STD整體小于15 hPa。
其年均精度變化如圖7。

圖7 地表至11 km的GPT3-P年均Bias、RMS和STD變化圖
圖7顯示,GPT3-P的年均Bias為正值,說明模型估值偏高;年均RMS與STD的變化較為平穩,總體GPT3-P模型較為可靠。
2.3.2 GPT3-T精度時間序列變化分析
GPT3-T日均精度變化如圖8。
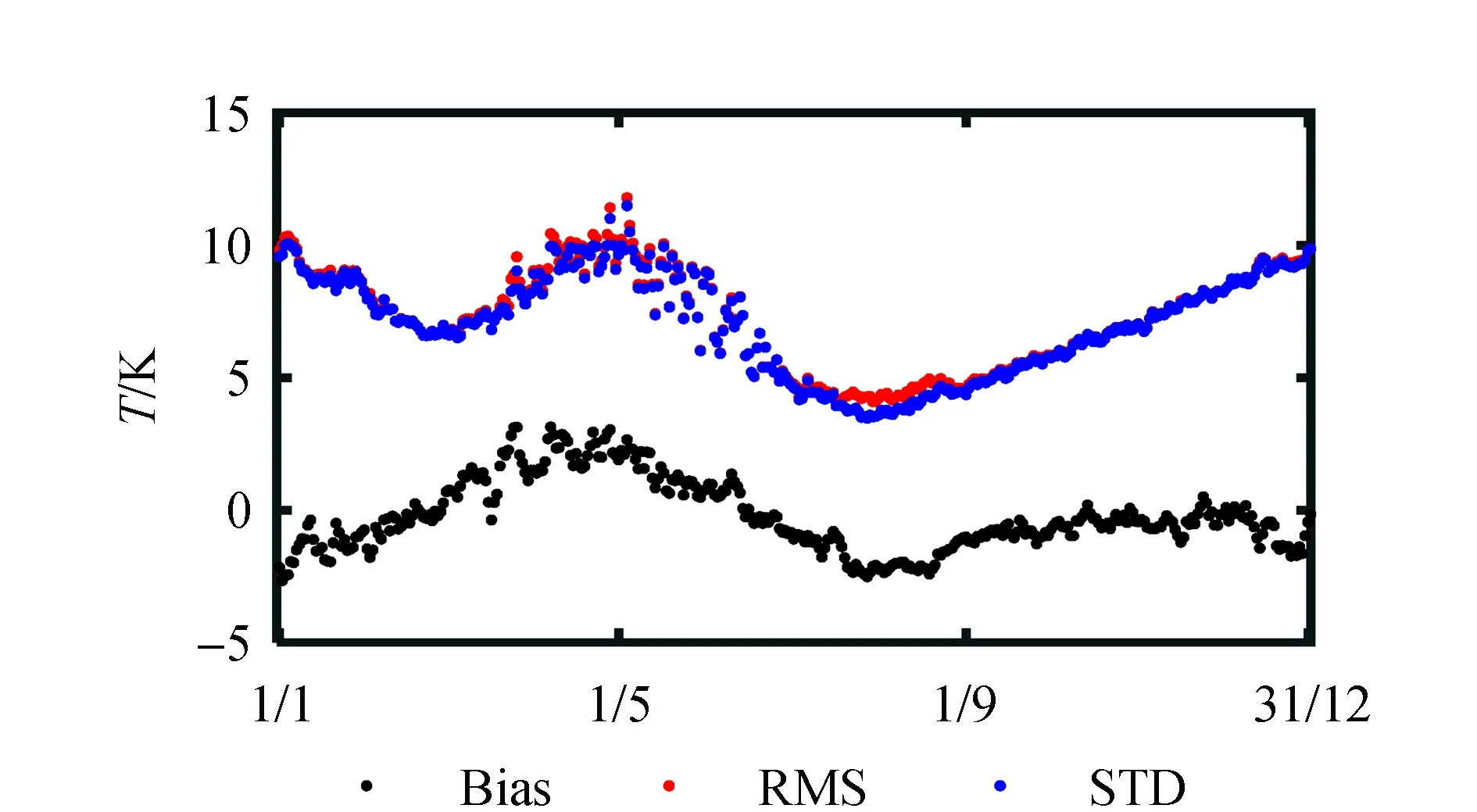
圖8 地表至11 km的GPT3-T日均Bias、RMS和STD變化圖
由圖8,GPT3-T日均Bias在1—5月呈上升趨勢,5—9月呈下降趨勢,9—12月變化較為平穩;日均RMS整體在10 K以下,在8月最小;日均STD變化與RMS基本相同。
圖9繪出了GPT3-T的年均精度變化。
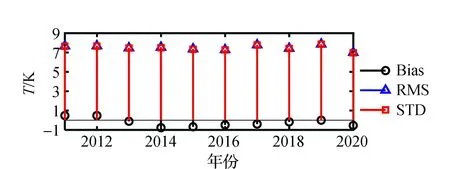
圖9 地表至11 km的GPT3-T年均Bias、RMS和STD變化圖
圖9得出,GPT3-T年均Bias絕對值在1 K以內,說明模型較穩定,無明顯系統誤差;年均RMS與STD的變化較為平穩,變化趨勢基本相同,與圖8表現一致。
2.3.3 GPT3-E精度時間序列變化分析
繪出GPT3-E日均Bias、RMS和STD變化如圖10。
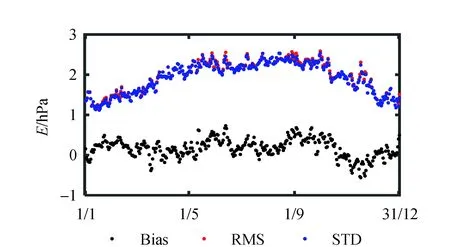
圖10 地表至11 km的GPT3-E日均Bias、RMS和STD變化圖
圖10可看出,GPT3-E日均Bias絕對值在1 hPa以內,模型較可靠;日均RMS整體表現為1—9月逐漸增加、9—12月逐漸減小的趨勢,呈現出一定的季節性,可能因為夏季水汽交換較為頻繁,精度略低,冬季氣溫低,水汽活動較少,故精度略高;日均STD變化基本與RMS一致。
圖11繪出了GPT3-E年均精度變化。
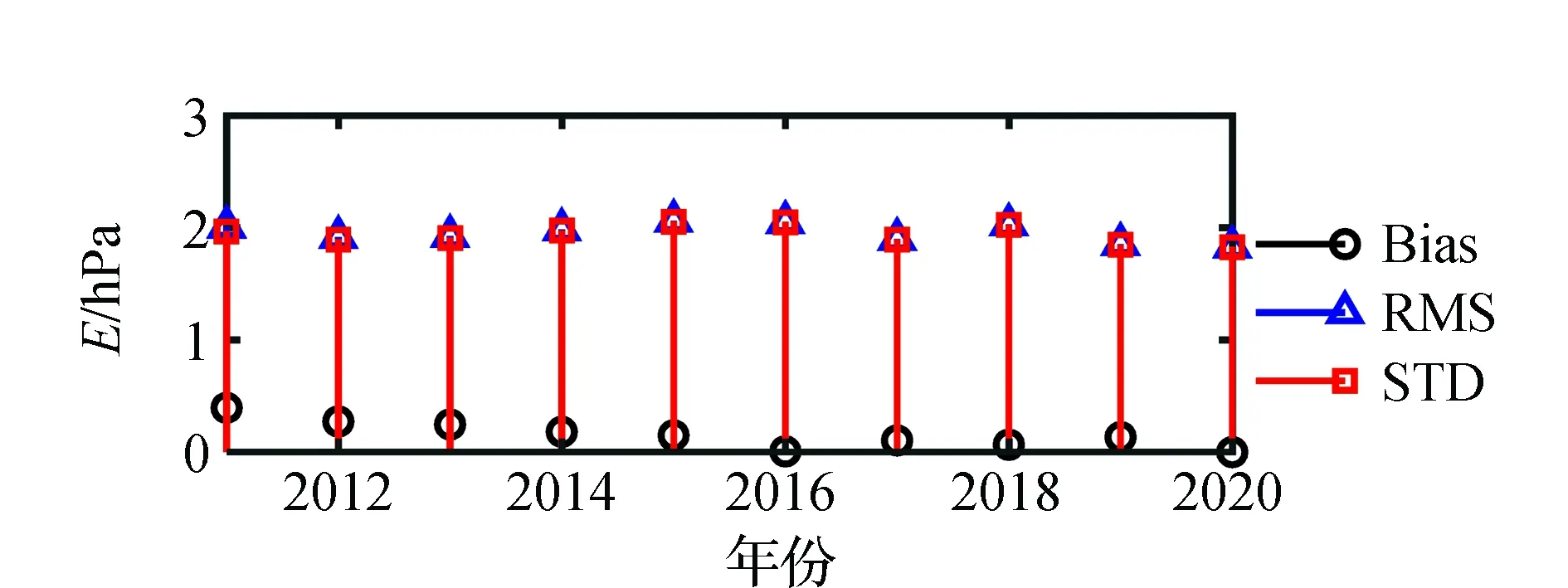
圖11 地表至11 km的GPT3-E年均Bias、RMS和STD變化圖
由圖 11,GPT3-E年均Bias絕對值較小,其中2016年和2020年Bias接近0,模型無明顯系統誤差;年均RMS整體變化較平穩,模型精度較高;年均STD變化與RMS類似。
2.3.4 GPT3-Tm精度時間序列變化分析
GPT3-Tm日均精度變化如圖12所示。

圖12 地表至11 km的GPT3-Tm日均Bias、RMS和STD變化圖
可以看出,GPT3-Tm日均Bias均為正值,說明模型高估現象嚴重;日均RMS整體分布在25 K以上,說明模型在地表至11 km大氣層面精度不高;日均STD整體分布在15~20 K之間,模型隨機誤差較大。
繪出GPT3-Tm年均Bias、RMS和STD變化如圖13。
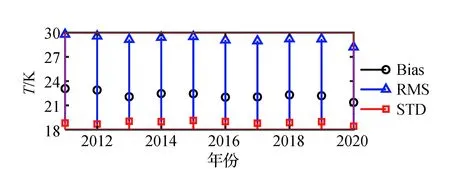
圖13 地表至11 km的GPT3-Tm年均Bias、RMS和STD變化圖
由圖13可得,GPT3-Tm年均Bias、RMS以及STD均較大,說明GPT3-Tm在中國區域的整個對流層剖面精度均不高。
3 結 論
利用2011—2020年中國區域82個無線電探空站相關信息,提取不同測站在各個等壓面的氣象參數,以此來分析GPT3模型在中國區域的誤差特性。從驗證結果可知:
1)GPT3在中國區域地表和地表至11 km大氣剖面精度分布具有差異性,其中GPT3-P和GPT3-Tm在中國區域地表精度要高于大氣剖面精度,而GPT3-E和GPT3-T相反。
2)從誤差特性來看,GPT3模型精度受緯度影響較大。其中GPT3-P、GPT3-T及GPT3-Tm精度隨緯度增加而減小,GPT3-E反之。就模型穩定性而言,GPT3-P和GPT3-Tm模型高估現象明顯,GPT3-T的Bias在30°~40°N區域內最小,為-0.05 K,而GPT3-E在40°~55°N區域內Bias最優,為0.04 hPa。
3)GPT3模型精度與高程具有相關性。GPT3-P在2 km以上,其RMS隨高程增加而增大;GPT3-T的RMS隨海拔升高而增大,低緯度區域精度較高緯度區域要好;對于GPT3-E,其RMS呈隨海拔高度升高而減小,且緯度越小,RMS越大的規律;GPT3-Tm的RMS由于沒有考慮高程遞減率,導致隨海拔升高而急劇增大。
整體而言,GPT3模型提供的P、T、E和Tm在中國地區范圍內具有較高精度和穩定性,但要想進一步提升模型預測精度,可在今后模型精度分析基礎上,考慮模型應用區域的緯度以及高程,以期獲得更加精準的模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06