基于LSTM預估補償的火電機組主蒸汽溫度控制系統
2023-02-03 13:15:02張國斌郭瑞君杜榮華辛曉鋼牛玉廣
發電設備 2023年1期
張國斌, 郭瑞君, 杜榮華, 辛曉鋼, 張 謙, 牛玉廣
(1. 內蒙古電力(集團)有限責任公司 內蒙古電力科學研究院分公司,呼和浩特 010020;2. 華北電力大學 控制與計算機工程學院,北京 102206)
主蒸汽溫度是電站機組運行過程中需要控制的重要參數之一。主蒸汽溫度過高,會使汽輪機中汽缸、汽閥、葉片等部件的壽命縮短,進而影響汽輪機的安全性[1]。對于300 MW火電機組,主蒸汽溫度降低10 K,汽輪機熱耗率升高約0.33%(約25 kJ/(kW·h)),并且機組容量越大,主蒸汽溫度對汽輪機熱耗率的影響越大[2],同時汽輪機末級處蒸汽含水量增加,會造成汽輪機葉片壽命縮短。此外,溫度的波動會導致汽輪機內汽缸和轉子脹差的變化,影響機組的安全運行。因此,快速、準確地控制主蒸汽溫度并將其穩定在設定值十分有必要。
隨著智能控制的發展,出現了模糊控制、智能比例積分微分(PID)控制、Smith預估控制和預測控制等先進控制方法[3-10]。黃宇等[3]針對600 MW直流爐主蒸汽溫度控制系統,提出了模糊自適應內模控制(FAIMC)策略,通過4種典型工況下的仿真表明,該策略的動態性能優于串級控制策略的動態性能。LI H等[4]設計了一種基于免疫遺傳算法和反向傳播(BP)神經網絡的智能PID控制系統,利用免疫遺傳算法全局尋優能力和良好的收斂性,優化神經網絡的權值,同時利用BP神經網絡調整PID參數,仿真結果表明,該系統在控制品質和魯棒性方面均優于常規PID控制系統。WANG G L等[5]介紹了一種用于超臨界機組主蒸汽溫度控制的多變量約束預測控制方法,將主蒸汽溫度階躍響應作為多變量約束預測控制算法的預測模型,仿真結果表明在負荷變化過程中,過熱蒸汽溫度可以控制在設定值附近。然而,這些方法主要是基于反饋調節的改進,反饋調節的特點是出現偏差才會調節,對于主蒸汽溫度控制系統這類具有大慣性、大遲延特點的系統的應用效果有限。如果能夠提前預測主蒸汽溫度的變化方向,使得減溫水系統能夠提前動作,將能夠有效克服各種擾動對蒸汽溫度的影響。張麗香等[6]提出一種自適應Smith預估補償的主蒸汽溫度控制系統。仿真研究結果表明,該系統設定值跟蹤性能和抗干擾能力都明顯優于經典串級汽主蒸汽壓力及溫度控制系統。但是,Smith預估器過于依賴過程精確模型,主蒸汽溫度受到機組負荷、各層磨煤機出力、給水流量和減溫水流量等眾多因素的影響,通過傳統的數學建模方法很難精確地構建各個變量對主蒸汽溫度影響的綜合模型,而神經網絡算法在理論上可以逼近對任意非線性函數的擬合,因此考慮采用機器學習模型對溫度進行預測,建立主蒸汽溫度控制系統預測模型。
隨著機器學習算法的發展,支持向量機(SVM)、BP神經網絡、循環神經網絡(RNN)、長短期記憶網絡(LSTM)及其變體均被應用到時間序列預測中。梅倩[7]提出了一種有選擇性的增量學習與快速剪枝算法結合的最小二乘法支持向量機(LSSVM)預測方法。該方法既能保證預測的精度,又能滿足在線預測的實時性要求。LSSVM具有理論體系完善、適合小樣本訓練的特點,然而對于大規模樣本的訓練效果不足。神經網絡具備擬合對象非線性特性的能力,在大規模樣本的時間序列預測上的效果更好。王德明等[11]采用優化后的BP神經網絡分別建立短期風速預測模型。然而,傳統的BP神經網絡所有的輸入彼此獨立,沒有跨時間傳遞信息的能力,不能很好地利用其中的信息。
RNN由Jordan M. I.于1986年提出[12],它不僅在層與層之間建立了權值連接,而且在隱含層之間的神經元中也進行了權值傳遞,這樣就具有跨時間傳遞信息的能力,因此其更擅長對時間序列數據進行預測。李潔等[13]建立RNN預測模型,對未來時段的日客流量進行預測。然而,RNN存在梯度消失和長期依賴的問題,即不能學習到長期信息,不能選擇性地遺忘不重要的信息。LSTM采用門控機制解決了RNN中梯度消失和長期依賴的問題,能更有效地被應用到時間序列預測中。楊國田等[14]建立基于LSTM的火電廠氮氧化物(NOx)排放預測模型,得出LSTM模型數據預測效果明顯優于RNN和LSSVM模型,并且預測結果的穩定性和準確率較高。
針對上述問題,筆者提出一種基于LSTM預估補償的主蒸汽溫度控制系統。一方面,考慮各個變量對主蒸汽溫度的影響,建立基于LSTM的時間序列預測模型,將大部分可能引起主蒸汽溫度變化的變量作為預測模型的輸入,預測主蒸汽溫度的變化;另一方面,以主蒸汽溫度預測模型為基礎,結合階梯式預測控制算法,構建基于預估補償的主蒸汽溫度控制系統,實現對主蒸汽溫度的精準超前調節,提升主蒸汽溫度控制系統的效果。
1 傳統主蒸汽溫度控制系統
以某330 MW火電機組汽包爐兩級噴水減溫為研究對象,其結構見圖1,其中:PV為反饋值,SP為設定值。
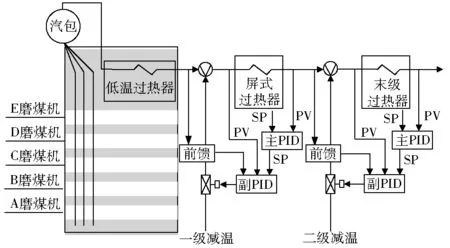
圖1 某330 MW火電機組汽包爐主蒸汽溫度控制系統結構
汽包出口的飽和蒸汽分別經過低溫過熱器加熱、一級減溫器降溫、屏式過熱器加熱、二級減溫器降溫和末級過熱器加熱后,進入高壓缸做功。主蒸汽溫度控制系統由兩段相對獨立的控制系統組成,分別為一級減溫水和二級減溫水系統,并且每級減溫水系統可分為A/B兩側,以二級減溫水系統A側控制為例說明傳統主蒸汽溫度控制系統。
傳統主蒸汽溫度控制一般采用選用串級-前饋控制結構。在二級減溫控制系統中,選用主蒸汽溫度作為主控制器的反饋值,將主控制器輸出作為副控制器設定值,將二級減溫后蒸汽溫度作為副控制器反饋值,副控制器的輸出直接控制減溫閥,二級減溫前蒸汽溫度作為二級減溫控制系統前饋。二級減溫前蒸汽溫度更能反映鍋爐燃燒狀況的變化,能更快地反映機組燃燒狀態對主蒸汽溫度的影響,補償燃燒狀態對主蒸汽溫度造成的干擾。
然而,主蒸汽溫度受到多種因素的影響,難以采用單一信號表征主蒸汽溫度的變化,并且二級減溫前蒸汽溫度與被控蒸汽溫度在不同的受熱區,不能只采用二級減溫前蒸汽溫度判斷主蒸汽溫度變化的趨勢。采用LSTM算法,訓練相關變量對主蒸汽溫度的時序關系模型,將主蒸汽溫度的預測值與當前值的差作為控制器的前饋信號,使控制器實現超前調節。
2 LSTM算法原理
LSTM算法由Hochreiter于1997年提出,并于2012年被Alex Graves進行了改良和推廣,是一種特殊的RNN算法[15]。LSTM算法采用門控機制解決了RNN算法中梯度消失和長期依賴的問題,能更有效地預測時間序列。LSTM網絡結構見圖2,其中:t為當前時刻;σ為Sigmoid激活函數;h(t)為當前時刻隱含層;C(t)為當前時刻存儲單元,也稱為細胞狀態;f(t)、i(t)、o(t)分別為遺忘門、輸入門、輸出門;a(t)為輸入層和隱含層向存儲單元提供的更新值;X(t)為輸入值;y(t)為輸出值。
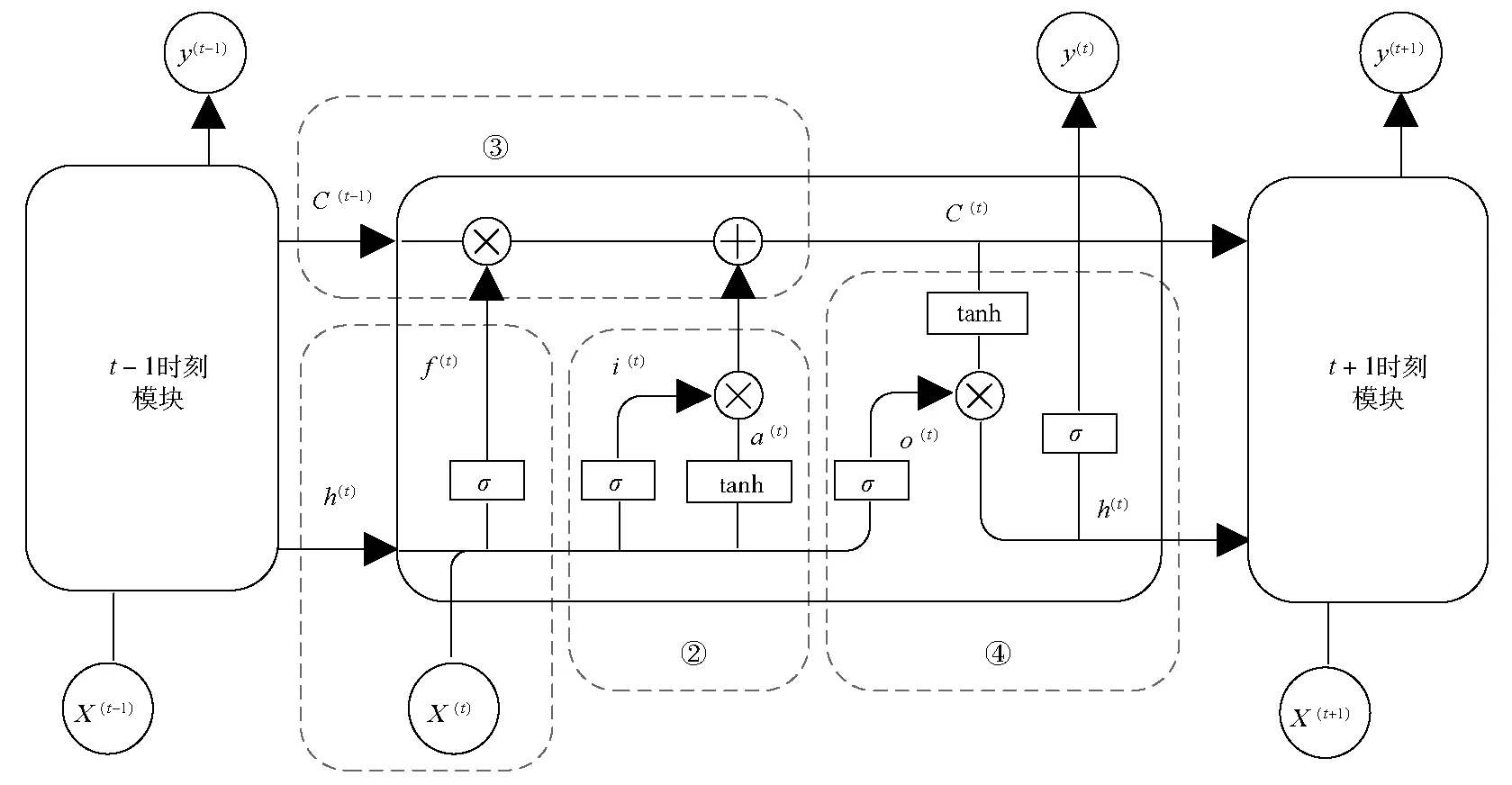
圖2 LSTM網絡結構圖
在不同時刻的模塊中,LSTM通過隱含層和存儲單元傳遞權值信息,并通過門控單元選擇性地使信息通過,從而控制信息的遺忘和更新。門控單元不提供額外信息,只是起到信息過濾的作用。細胞狀態記錄了長時記憶傳播的信息,各個門控單元在細胞狀態的基礎上丟棄和增添信息,隱含層狀態記錄了短期記憶信息。
每個LSTM模塊可以分為遺忘層、輸入層、更新層和輸出層四個部分。
(1) 第一個部分為遺忘層,將上一時刻隱含層的輸出h(t-1)和當前時刻的輸入x(t)作為輸入,通過Sigmoid激活函數得到細胞狀態被選擇的概率f(t),其取值在[0,1](1表示完全保留細胞狀態,0表示完全遺忘細胞狀態)。
(2) 第二個部分為輸入層,來確定將哪些信息存放到細胞狀態中,將輸入通過tanh激活函數后產生更新值a(t)。采用tanh激活函數是因為輸出在[-1,1],可以在更新細胞狀態的過程中加強或減弱記憶信息。通過a(t)與遺忘門輸出相乘的結果,可以表明細胞狀態需要更新的程度。
(3) 第三個部分為更新層,表示細胞狀態的更新過程。將上一時刻的細胞狀態經過遺忘層丟失一部分信息,再經過輸入更新一部分信息,生成新的細胞狀態。
(4) 第四個部分為輸出層,將細胞狀態經過tanh激活函數得到輸出值,并經過新的遺忘門篩選后送到輸出層預備值中,輸出層預備值也是下一時刻的隱含層輸入,將預備值送入Sigmoid激活函數得到預測輸出,從而實現時間序列的預測。
LSTM算法相比于RNN算法主要增加了3個門控單元控制信息的流通以更新細胞狀態,從而在網絡結構上實現對長短期歷史數據信息的利用,既能學到長期信息,又能對不重要的近期信息選擇遺忘。

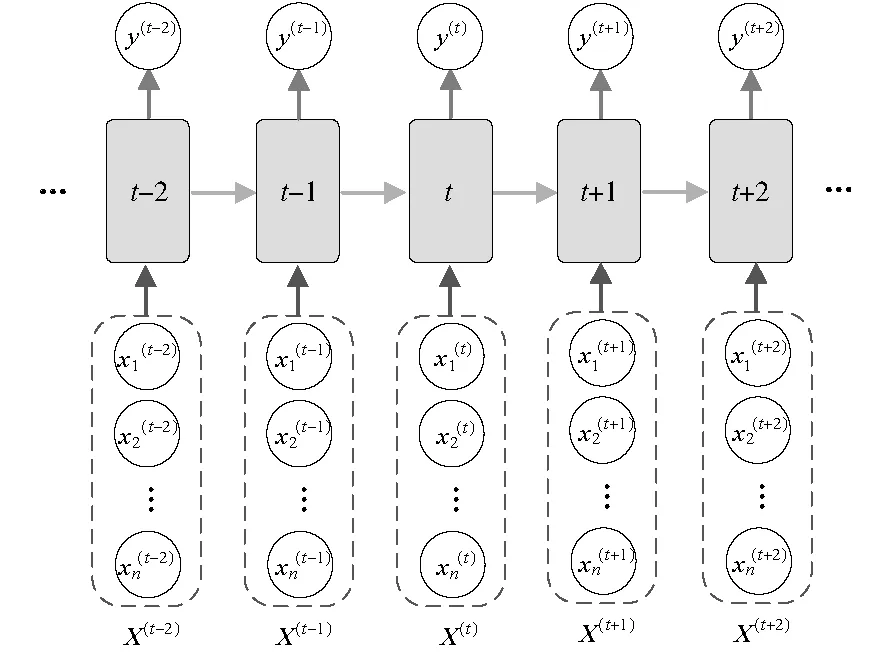
圖3 LSTM算法的整體結構模型
在帶前饋的預測控制算法中,需要得到優化時域內所有的預測值,因此LSTM算法的整體結構考慮到反向傳播時域內所有時刻的誤差,而不是只考慮反向傳播最后時刻的誤差,從而保證同時得到優化時域內所有的預測值。
采用這種結構,相比于BP算法,除了較高的準確度外,還具備另一個優點,即能同時輸出優化時域內的所有預測值,并且每秒都在更新優化時域內的所有值,只需要在訓練時將整體結構模型的長度設置成優化時域,而BP算法每次只能輸出單時間的預測值,不能更新過去的預測值。
采用Adam算法更新學習率,由Diederik Kingma在2015年提出的自適應學習率的算法,是一種可以替代傳統隨機梯度下降的優化算法,根據損失函數梯度的一階矩估計和二階矩估計調整參數的學習率,具體公式[16]為:
(1)
3 基于LSTM預估補償的主蒸汽溫度控制
3.1 主蒸汽溫度控制系統
廣義預測控制由Clarke等于1987年在最小方差自校正的基礎上提出,采用多步預測優化,最小化優化時域內的性能指標函數,既不需要精確知道系統的滯后,也不需要對象的精準建模,適用于難以精確建模的滯后控制系統。
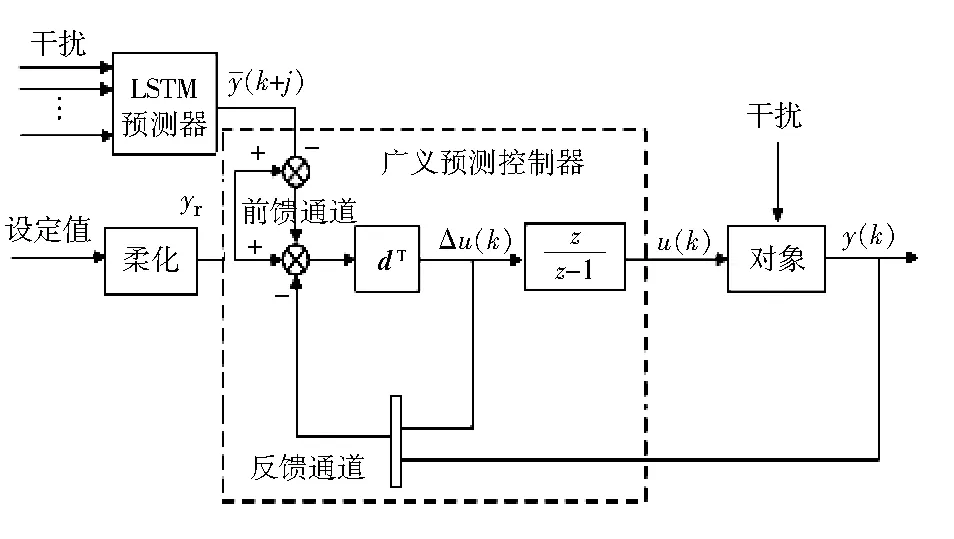
圖4 帶預估補償前饋的主蒸汽溫度控制系統
性能指標J的公式為:
(2)
式中:yr(t+j)為柔化后的設定值;y(t+j)為模型預測輸出;[N0,N1]為優化時域;Nu為控制時域;λ為控制加權系數,使控制增量的變化不要過于劇烈。控制算子由控制系統的優化性能指標最小值計算得到,令dJ/d(Δu)=0,得:
dT=(1,0,…,0)×(GTG+λ)-1GT
(3)
Δu=dT(Yr-Y)
(4)
Yr=[yr(t+N0),yr(t+N0+1),…,yr(t+N1)]T
(5)
Y=[y(t+N0),y(t+N0+1),…,y(t+N1)]T
(6)
式中:G為預測模型階躍響應系數組成的矩陣;Yr和Y分別為柔化后設定值和模型預測輸出組成的矩陣。
基于LSTM預估補償的預測控制器從兩個方面對主蒸汽溫度控制進行改進。一方面,廣義預測控制器能根據對象模型預測溫度,從而提前控制減溫閥穩定溫度。另一方面,對于可測不可控干擾,選用LSTM算法預測被控溫度,并通過前饋預先加以補償,使調節器能提前動作,克服控制遲延,進一步提升控制效果。
3.2 主蒸汽溫度預測
3.2.1 主蒸汽溫度對象特性
為了使神經網絡建立的預測器模型替代干擾對被控溫度的傳遞函數,需要確定減溫水流量對主蒸汽溫度控制的遲延時間。在實際運行時主蒸汽溫度會受到各種因素的影響,因此選取穩定工況的歷史曲線(見圖5)。從圖5中可以看出:一級減溫水流量對二級減溫前蒸汽溫度的控制遲延時間為70 s,二級減溫水流量對主蒸汽溫度的控制遲延時間為90 s。
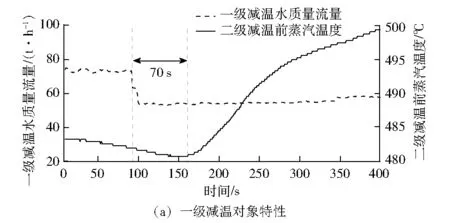
圖5 一級減溫和二級減溫對象的特性
3.2.2 主蒸汽溫度預測模型
一級減溫系統的控制目標為二級減溫前蒸汽溫度,二級減溫系統的控制目標為主蒸汽溫度,由于二級減溫前蒸汽溫度是否穩定對主蒸汽溫度的影響很大,因此要將主蒸汽溫度控制好,對二級減溫前蒸汽溫度和主蒸汽溫度的預測和控制都很重要。控制系統的控制效果取決于前饋預測的準確性,需要對比BP算法和LSTM算法的預測效果,一級減溫和二級減溫控制系統參數見表1,其中給煤量和入口風量為5臺磨煤機(A、B、C、D、E磨煤機)的數據,因此每組的輸入變量為16組,預測70 s后的二級減溫前蒸汽溫度和90 s后的主蒸汽溫度。
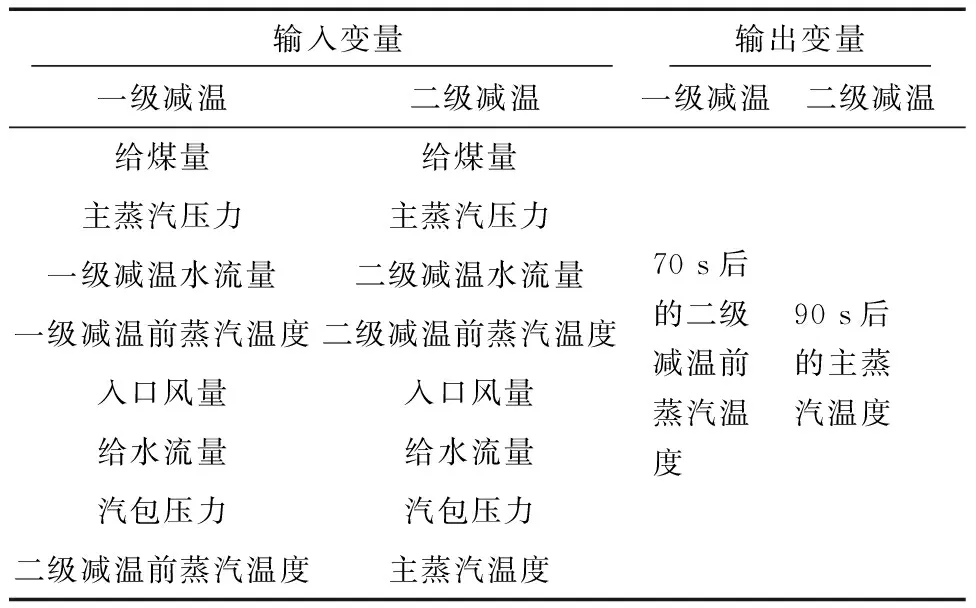
表1 一級和二級減溫控制系統參數
選取10 d的運行數據,每隔5 s取1個點,共有172 800組數據,將數據歸一化后輸入網絡進行訓練。進行預測訓練時,選取75%的數據作為訓練數據,取25%的數據作為測試數據,對比BP算法和LSTM算法的訓練效果。BP算法訓練采用Sigmoid激活函數,輸入時域為100 s,即將16組輸入變量的100 s(20個點)的數據堆疊起來作為輸入,2層隱含層個數分別為64和16,訓練代數為100,初始學習率為0.5,學習輸入歷史數據的特征。LSTM算法訓練將16組數據直接輸入到當前時刻的模塊中,不需要將歷史數據堆疊,隱含層個數為64,訓練代數為100,初始學習率為0.5。2種方法設置成相同的訓練代數和初始學習率,預測70 s后的二級減溫前蒸汽溫度和90 s后的主蒸汽溫度。
為了評價和對比預測效果,采用平均絕對值誤差EMA、均方誤差EMS、平均絕對百分誤差EMAP3個指標說明預測效果,一般認為EMA小于10%時的預測效果可以被接受。3個指標的公式分別為:
(7)
(8)
(9)

將BP算法和LSTM算法的神經網絡訓練結果反歸一化后,比較兩者的預測效果(見表2)。
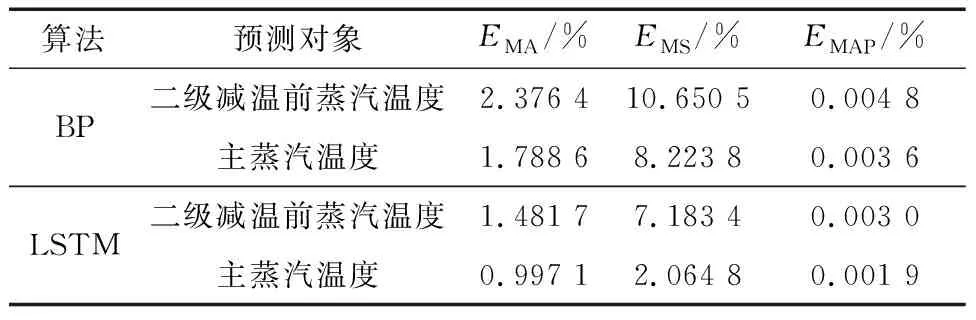
表2 BP算法與LSTM算法的效果對比
由表2可以看出:主蒸汽溫度的預測誤差比二級減溫前蒸汽溫度的小,并且LSTM算法的效果明顯優于BP算法,適合離線訓練網絡參數,深入學習歷史數據中的隱含信息。選取3 000 個樣本的訓練集和2 000 個樣本的測試集作為LSTM算法的訓練效果(見圖6)。
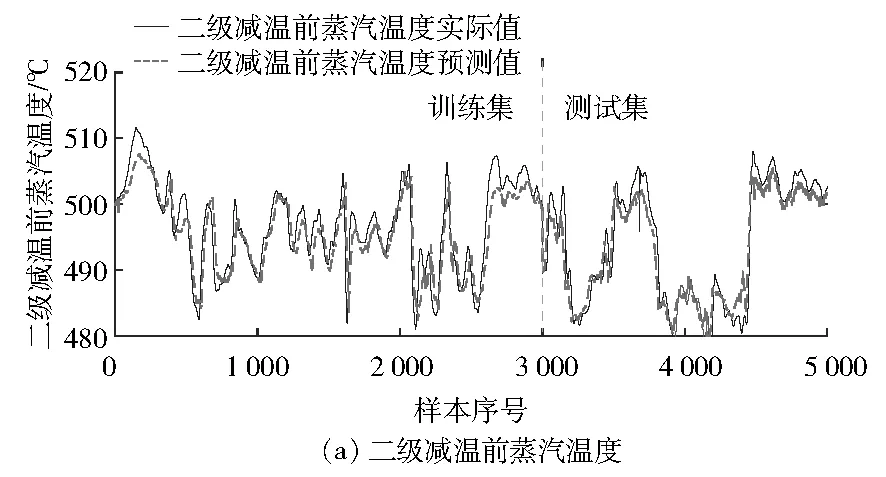
圖6 LSTM算法的預測效果
由圖6可以看出:二級減溫前蒸汽溫度和主蒸汽溫度的測試集中實際值與預測值變化趨勢的吻合程度較高,誤差較小,有很好的魯棒性。
圖7為電廠中采用LSTM算法的實際預測效果。圖7(a)中將預測值推遲70 s后,其曲線與二級減溫前蒸汽溫度實際值曲線相吻合;圖7(b)中將預測值推遲90 s后,其曲線與主蒸汽溫度實際值曲線相吻合。這說明電廠實際運行時,預測值能提前反映機組參數狀態,可將其用于控制系統的預估補償前饋中,進而起到提前控制的作用。

圖7 電廠實際預測效果
3.3 主蒸汽溫度控制效果
改進前電廠采用常規的串級PID控制策略對主蒸汽溫度進行控制,選取其中1 h的控制效果圖(見圖8),其中:機組負荷(MW)由[100,300]歸一化到[0,100],一級減溫水質量流量(t/h)由[20,135]歸一化到[0,100],二級減溫水質量流量(t/h)由[0,50]歸一化到[0,100]。
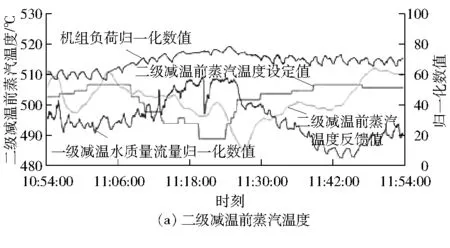
圖8 改進前蒸汽溫度控制效果
由圖8可以看出:在10:54:00至11:06:00,機組負荷在211~228 MW波動,主蒸汽溫度在設定值附近振蕩,二級減溫前蒸汽溫度波動最大偏差為7.3 K,由于二級減溫前蒸汽溫度存在偏差,即使二級減溫水的閥門完全關閉,主蒸汽溫度也一直低于設定值。在11:06:00后,機組負荷由220 MW上升到250 MW,運行人員手動降低二級減溫前蒸汽溫度的設定值防止主蒸汽溫度超溫。總而言之,采用原有的控制策略時溫度偏差大,甚至需要運行人員的手動干預。將基于LSTM預估補償的主蒸汽溫度控制策略應用于電廠控制中,分析電廠的實際控制效果,其歸一化方式與常規的串級PID控制策略相同。
改進后穩態時主蒸汽溫度的控制效果見圖9。
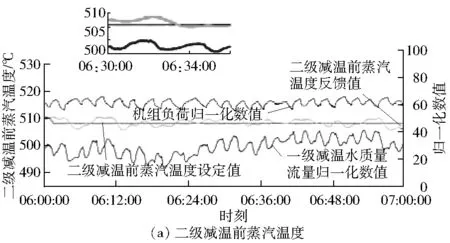
圖9 改進后穩態時蒸汽溫度控制效果
由圖9可以看出:在改進后的控制策略中,LSTM預估器能夠預測蒸汽溫度的變化方向,從而利用控制器對減溫水進行超前調節,避免了主蒸汽溫度的大幅度波動。該電廠中一級減溫控制系統響應相對較快,并且一級減溫水流量的調節范圍廣,因此主要對二級減溫前蒸汽溫度超前調節,而二級減溫水流量起到穩定主蒸汽溫度的作用。以圖9中的二級減溫前蒸汽溫度為例進行分析。在06:32:00時,二級減溫前蒸汽溫度高于設定值且在溫度的高點時,一級減溫水流量提前降低,防止后續二級減溫前蒸汽溫度欠溫。同理,在06:12:00時,主蒸汽溫度高于設定值且在高點時,二級減溫水流量提前降低,防止06:14:00時主蒸汽溫度欠溫,最終使主蒸汽溫度更快地收斂到設定值上。當機組負荷在210~232 MW波動時,二級減溫前蒸汽溫度波動最大偏差為3.48 K,主蒸汽溫度波動最大偏差為3.06 K,說明了基于LSTM預估補償的主蒸汽溫度控制策略的有效性。
改進后動態時主蒸汽溫度的控制效果見圖10。
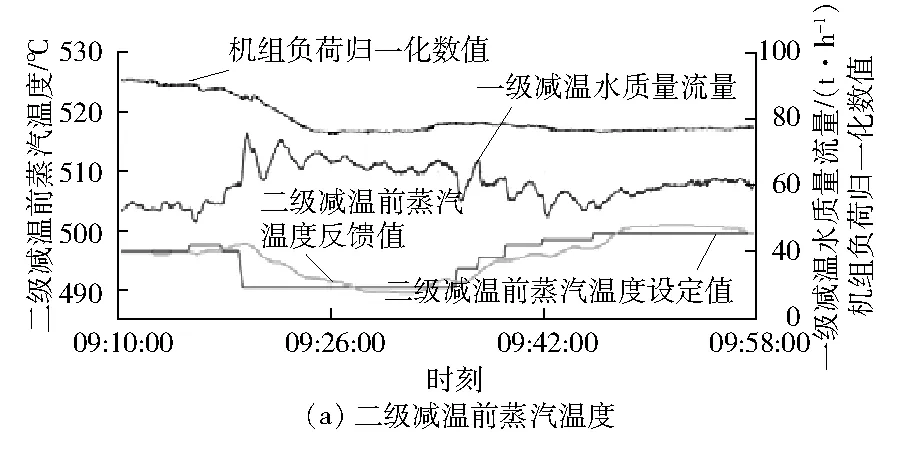
圖10 改進后動態時蒸汽溫度控制效果
由圖10可以看出:在09:19:00時,二級減溫前蒸汽溫度的設定值由497 ℃調整到490 ℃,主蒸汽溫度設定值由538 ℃調整到533 ℃,此時減溫水流量快速提升,然而機組負荷下降,二級減溫前蒸汽溫度和主蒸汽溫度會隨著機組負荷的下降而下降。因此,減溫水的閥門需要提前關小一部分,防止蒸汽溫度超調,同時在調節過程中抑制燃燒狀態造成的干擾,說明了動態過程中基于LSTM預估補償的主蒸汽溫度控制策略的有效性。
4 結語
針對具有大慣性、大延遲特點的主蒸汽溫度控制系統,基于LSTM預估補償的主蒸汽溫度控制系統能夠預測蒸汽溫度變化的方向,對減溫水進行超前調節,避免了主蒸汽溫度大幅度波動,提升控制系統的動態特性和控制效果。電廠的實際應用表明基于LSTM預估補償的主蒸汽溫度控制系統的應用效果優于常規控制系統的應用效果,能使主蒸汽溫度更快穩定在設定值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-11-30 02:58:01
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年8期)2016-10-09 02:11:50
核科學與工程(2015年4期)2015-09-26 11:59:03
中國醫藥科學(2015年19期)2015-02-27 12:33:11