偏心分量誤差對POS 解算和激光點云精度影響試驗分析
2023-02-05 13:56:44楊兵戰
經緯天地 2023年6期
楊兵戰
(遼寧省自然資源事務服務中心,遼寧沈陽 110034)
0 引言
目前航空攝影測量系統主要由機載傳感器、機載GNSS 和慣導IMU 等部件集成。IMU 一般在機載傳感器生產過程中集成于系統內部,因此IMU 與傳感器投影中心之間位置和視準軸的相對關系是固定的,在出廠檢校過程中可以得到有效地檢測和修正。機載GNSS 測得的定位數據只是GNSS 天線的實際位置信息,但最終要求輸出的是相機投影中心的外方位元素,因此需要測量出GNSS 與IMU 之間的相對位置關系,即GNSS 的偏心分量。航空攝影測量生產中,偏心分量的測量坐標系通常是以設備的某個參考中心作為原點;X軸為設備安裝正方向,一般也是飛行方向;Y軸在安裝平面上垂直于X軸,指向飛行右側;Z軸按照右手螺旋法則指向飛行正下方。在實際航空攝影測量生產過程中,為保證GNSS 信號接收質量,一般需要保證安裝位置開闊無信號遮擋,因此GNSS 天線通常安裝在飛機頂部。由于飛機型號和安裝條件不同,導致每次設備安裝完成后,GNSS 與航攝儀投影中心之間的偏心分量不同,因此外場設備安裝完成后都需要航攝人員手動測量準確的偏心分量,這也就不可避免帶來誤差。為此,本文以徠卡公司的TerrainMapper 機載激光雷達系統為例,對該設備獲取的實際航攝資料進行處理,分析偏心分量測量誤差對POS 解算結果以及對最終激光點云成果數據精度的影響[1]。
1 試驗概況
本文選取了2022 年獲取的某地區一組18 pts/㎡激光點云數據以及對應的GNSS/IMU 數據進行處理試驗。試驗所用數據均由徠卡TerrainMapper 機載激光雷達設備獲取,設備配套PAV100 陀螺穩定平臺,在數據獲取的過程中實時補償傳感器姿態,設備內部集成的慣導是SPAN CUNS5-H 型號IMU,采樣頻率是500 Hz,配套GNSS 接收器是NowAtel 公司的雙頻機載GNSS 接收機,安裝在飛機頂部,作業時同時接收GNSS 和GLONASS 信號,采樣頻率為2 Hz。
徠卡TerrainMapper 激光雷達偏心分量測量的坐標系統是以PAV100 的參考中心為坐標原點,X軸指向飛機頭部方向、Y軸指向飛機右側、Z軸朝向飛機下方。在該坐標系統下,PAV100 參考中心至GNSS 接收機相位中心的矢量需外業航空攝影人員手動測量。PAV100 參考中心與慣導IMU 之間的相對位置關系固定,已在出廠過程中完成檢定,并在系統內部修正。本次試驗數據的偏心分量測量結果為:(X:0.10 m,Y:-0.03 m,Z:-1.17 m)。試驗技術流程如圖1 所示。
2 偏心分量誤差對POS 數據解算精度影響分析
以外業測量的偏心分量數值作為初始值,依次調整X、Y、Z數值,調整值作為引入測量誤差后的偏心分量。使用徠卡航測GNSS/IMU 數據處理軟件Inertial Explorer 進行軌跡解算,解算方式采用精密單點定位(PPP),處理過程中使用相同的GNSS/IMU數據、精密星歷文件以及解算參數,保證除偏心分量之外的各項配置參數一致,以排除元數據和參數配置對解算結果的干擾。以外業測量的偏心分量數值解算的軌跡作為參考基準,另外分別以x、y、z調整后的偏心分量進行軌跡解算,最后將各組解算的結果與參考基準進行比較分析。
根據數據所在地理位置,采用相同的WGS84坐標系統和UTM 投影將各組處理后的軌跡以文本.txt 格式輸出。選取測線上部分數據,通過時間關聯,比較分析同一時刻各組軌跡相較于參考基準組軌跡的平面坐標和高程誤差。試驗中選取了4條航線,每條航線選取了6000 個左右的時間點軌跡信息樣本進行誤差分析,統計結果如表1 所示。

表1 WGS84 坐標系統下POS 處理結果比較分析單位:m
從表1 數據可以分析出,偏心分量X軸和Y軸方向的測量誤差,主要影響POS 處理結果的平面精度,對高程精度影響幾乎可以忽略不計,偏心分量x和y的誤差值會以不同比例傳遞給東坐標和北坐標。通過進一步計算可以分析出,x和y的誤差值以1∶1 直接傳遞給平面坐標。偏心分量Z軸方向的測量誤差主要影響POS 處理結果的高程精度,對平面精度的影響非常小,并且誤差值同樣以1∶1 傳遞到處理結果的高程上[2]。
基于以上數據試驗結果,本文將進一步分析X軸和Y軸方向偏心分量測量誤差與軌跡的東坐標和北坐標精度之間的主要傳遞關系。
在實際飛行作業過程中,受湍流、側風等外部因素的影響,飛機的機頭方向與飛行方向通常不一致,并且在飛行員保持飛機沿航線飛行的過程中,飛機的機頭方向時刻都在變化。在此過程中,PAV100陀螺穩定平臺會在數據采集過程中對相機姿態進行實時姿態補償,保證傳感器的正方向基本與航線方向一致。通過PAV100 記錄的數據,可以分析出PAV100 各個時刻的姿態補償信息,如圖2 所示。
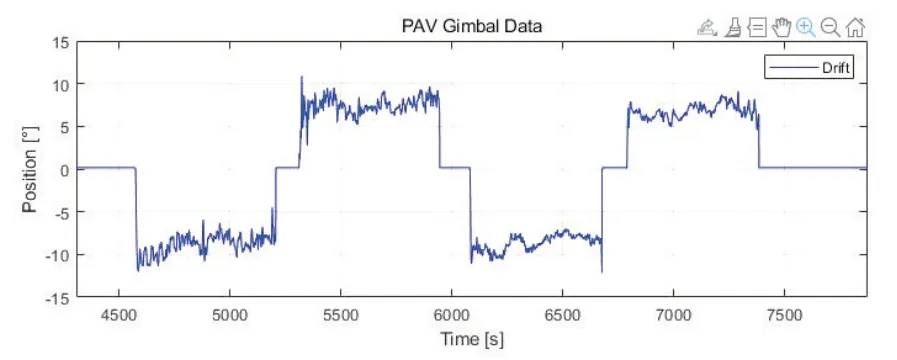
圖2 PAV100 姿態補償信息
PAV100 順時針運動為姿態補償正方向。通過PAV100 姿態補償數據可以看出,航線1 和航線3作業過程中,進行了-7°~-12°范圍內的航向角補償,說明飛機頭部方向與航線之間存在+7°~+12°偏離角度。同理,可以分析出航線2 和航線4 作業過程中,飛機與航線之間存在-5°~-10°范圍的偏離角度。
結合PAV100 姿態補償數據可以得出,航線上作業時,飛機的機身角度與航線之間存在實時夾角θ(該夾角不是固定值),這將影響偏心分量測量誤差在平面坐標系XOY上的分布方式。經過POS 解算處理后,GNSS 位置信息是真實的,當偏心分量x或y值增大時,將導致誤差以某種方式負相關傳遞給最終軌跡的東坐標和北坐標。基于前文試驗結果,偏心分量x值和y值的測量誤差會以1∶1 比例在平面精度體現,初步猜測x值和y值測量誤差與最終解算得到的軌跡東坐標和北坐標之間存在幾何關系。以偏心分量x值的測量誤差為例進行分析,其幾何關系初步可以假設為式(1)所示:
基于偏心分量誤差對POS 解算經度的影響,試驗數據中,井字形設計的4 條航線設計角度為205°和25°,結合PAV100 的姿態補償角度,利用式(1)關系公式,當偏心分量x值增大0.050 m,可以計算出偏心分量x誤差值分別傳遞到軌跡的東坐標和北坐標的誤差數值。
將計算得到的誤差數據與偏心分量中x的值誤差+0.050 m 的數據小組中統計出的實際誤差值進行對比分析,最終得到的結果如表2 所示。

表2 POS 處理誤差與公式計算誤差分布比較分析單位:m
通過表2 可以得出:采用上述公式計算的誤差分布與POS 實際解算的誤差分布基本一致,驗證了前面偏心分量x誤差值分布關系的猜測是正確的,因此可以確定偏心分量測量誤差與東坐標、北坐標誤差的主要傳遞關系基本可以采用三角函數進行估算。同理,可以得到偏心分量y測量誤差與東坐標、北坐標之間的傳遞關系[3]。
實際上,外業飛行過程中,傳感器還存在翻滾角和俯仰角之間的實時姿態變化,結合表2 可以分析出這兩個角度對偏心分量的誤差傳遞影響較小,利用偏心分量誤差計算軌跡系統誤差時基本可以忽略。
3 對激光點云精度影響分析
激光點云的精度很大程度上依賴于軌跡解算成果的精度。偏心分量如果測量不準確,必然導致最終解算的軌跡存在系統誤差,采用該軌跡進行后續的數據生產工序,必然會對激光點云成果精度產生影響。
本文采用徠卡HxMap 數據后處理軟件,分別利用偏心分量x、y、z測量值調整前以及調整后各小組解算的軌跡進行點云數據處理,處理過程中保證所有使用的參數一致,消除參數變化對處理結果的干擾。處理后得到的成果點云數據,以時間屬性作為激光點的唯一性,隨機選取其中部分點作為樣本分析。以初始偏心分量的處理流程所得到的預處理激光點云為參照對象,將調整偏心分量后各組數據處理所得到點云坐標信息與之進行比較分析。以試驗數據中航線4 的點云數據為例,結果如表3所示。
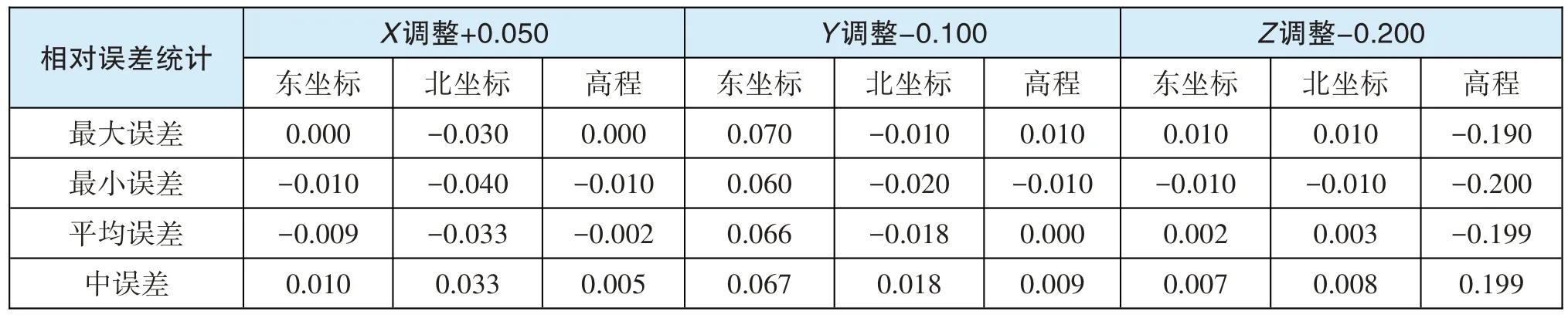
表3 偏心分量誤差對激光點云精度影響分析單位:m
結合表1 的誤差分布和表3 的點云精度統計可以分析得到:偏心分量的測量誤差會傳遞到預處理后的激光點云數據上,偏心分量x、y的測量誤差在傳遞到點云的平面坐標上會分別有小幅度減小,z的測量誤差則會完全反映在點云的高程精度上[4]。
4 結語
綜合試驗結果分析,得出以下結論:
1)偏心分量的測量誤差會傳遞到POS 的解算結果,并且偏心分量x、y和z值測量誤差會分別等比例反映在平面和高程上。
2)偏心分量x、y測量誤差與POS 解算的東坐標、北坐標誤差之間存在固定的三角函數關系,并且與偏心分量x軸方向和平面坐標系X軸的實時夾角相關;夾角越小,偏心分量x誤差值則更多地傳遞給北坐標,偏心分量y誤差值更多地傳遞給東坐標。
3)偏心分量測量誤差導致POS 解算的東坐標、北坐標以及高程上的系統誤差,會不同程度對應傳遞到預處理后的激光點云坐標信息上,并且高程精度會等比例受到誤差影響。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
山東工業技術(2016年15期)2016-12-01 05:31:22
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06