基于Matlab 的最少拍無(wú)紋波控制系統(tǒng)設(shè)計(jì)
2023-02-07 01:57:20李號(hào)李自成鄭堰沈志強(qiáng)楊浩鄒夢(mèng)玨
科海故事博覽 2023年2期
李號(hào),李自成,鄭堰,沈志強(qiáng),楊浩,鄒夢(mèng)玨
(成都理工大學(xué)工程技術(shù)學(xué)院,四川 樂(lè)山 614000)
最少拍系統(tǒng)設(shè)計(jì)的原理是保持采樣點(diǎn)的數(shù)據(jù)不變或者為零,通過(guò)使用Z 變換概念使采樣點(diǎn)數(shù)據(jù)保持不變或者在很小誤差之內(nèi)。在許多情況下,因?yàn)榭刂谱饔玫牟黄交裕蓸狱c(diǎn)的系統(tǒng)輸出會(huì)出現(xiàn)紋波,這就是有波紋設(shè)計(jì)。無(wú)波紋設(shè)計(jì)是在輸入信號(hào)作用下,系統(tǒng)內(nèi)部經(jīng)過(guò)多次拍達(dá)到穩(wěn)定,采樣點(diǎn)間無(wú)波動(dòng),并且輸入誤差為零。
通常采樣點(diǎn)間的紋波不能在采樣點(diǎn)的信號(hào)上出現(xiàn),要達(dá)到采樣點(diǎn)之間的信號(hào)不能進(jìn)行閉環(huán)控制。被控對(duì)象G(z)的全部零點(diǎn)要被閉環(huán)函數(shù)所包含。由于控制器D(z)在系統(tǒng)中對(duì)極點(diǎn)進(jìn)行處理,之后采樣點(diǎn)間的紋波會(huì)消失[1-2],其中典型輸入的z 變換公式為:

1 最少拍控制系統(tǒng)
一般在數(shù)字控制系統(tǒng)中,一個(gè)采樣周期為一拍,最小拍控制的概念是指在輸入下可以讓系統(tǒng)輸出在有限個(gè)周期內(nèi)進(jìn)行無(wú)誤差跟蹤輸入(即系統(tǒng)輸出穩(wěn)態(tài)誤差為零)。最小拍控制系統(tǒng)也為時(shí)間最優(yōu)控制系統(tǒng),評(píng)價(jià)該系統(tǒng)的依據(jù)是按照系統(tǒng)要求達(dá)到的系統(tǒng)調(diào)節(jié)時(shí)間最短或越短越好[3]。下面用一個(gè)例子來(lái)介紹此系統(tǒng)。
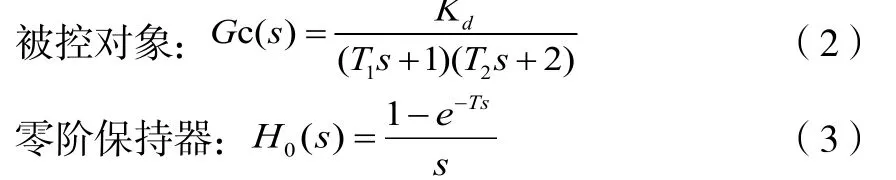
(Kd=2、T1=1、T2=1,采樣周期為1s)
Gc(s)指的是被控對(duì)象。
D(z)指的是數(shù)字控制器。
H(s)指的是零階保持器。
T 指的是采樣周期。
當(dāng)控制對(duì)象和零階保持器離散化了以后,就變成了廣義對(duì)象的Z傳遞函數(shù),所以廣義對(duì)象的脈沖函數(shù)為:

1.1 最少拍控制系統(tǒng)產(chǎn)生紋波的原因
系統(tǒng)輸出采樣點(diǎn)間的紋波是因?yàn)榭刂屏枯敵霾▌?dòng)造成的,這種波在采樣點(diǎn)之間又無(wú)法被發(fā)現(xiàn),本質(zhì)是控制變量Z 變換后產(chǎn)生非零極點(diǎn)造成。通常解釋為由數(shù)字控制器的輸出序列u(k),在經(jīng)過(guò)若干次拍后為振蕩收斂。
1.2 消除紋波的條件
紋波造成的采樣點(diǎn)間的誤差會(huì)增加系統(tǒng)整體損耗,得到的結(jié)果會(huì)與預(yù)計(jì)效果產(chǎn)生偏差。最小拍無(wú)紋波系統(tǒng)的必要條件是被控對(duì)象G0(s)給出的c(t)必須滿足與輸入相同的形式。最小拍控制系統(tǒng)的紋波主要產(chǎn)生原因是通過(guò)數(shù)字控制器的輸出后,會(huì)產(chǎn)生振蕩收斂,在系統(tǒng)中會(huì)顯示無(wú)紋波,最重要的是確保穩(wěn)態(tài)控制信號(hào)為零或者保持不變。最后還要確定無(wú)紋波系統(tǒng)必須要滿足有紋波系統(tǒng)的性能要求等,綜上所述,即可消除紋波,設(shè)計(jì)出無(wú)紋波控制系統(tǒng)。
1.3 設(shè)計(jì)要求
1.快速性。系統(tǒng)在有限 拍數(shù)后產(chǎn)生穩(wěn)態(tài)設(shè)計(jì)狀態(tài),這時(shí)系統(tǒng)可以保證跟蹤輸入量所需要的周期最少。
2.穩(wěn)定性。不但要保證控制系統(tǒng)中控制量的收斂,還要保證控制量在采樣點(diǎn)上的準(zhǔn)確穩(wěn)定,滿足這兩個(gè)條件,才能確保閉環(huán)系統(tǒng)穩(wěn)定。
3.準(zhǔn)確性。對(duì)于輸入特定的系統(tǒng),系統(tǒng)輸出后的采樣值達(dá)到系統(tǒng)要求,可以精確跟蹤穩(wěn)態(tài)狀態(tài),即采樣點(diǎn)輸出無(wú)誤差。[4]
2 控制系統(tǒng)設(shè)計(jì)
因?yàn)樽钚∨目刂葡到y(tǒng)對(duì)于輸入形式不同,數(shù)字控制器也會(huì)不同,所以我們需要對(duì)不同的信號(hào)分別進(jìn)行設(shè)計(jì)考慮。
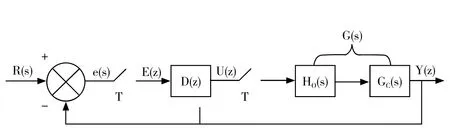
圖1 離散系統(tǒng)原理圖
2.1 單位階躍信號(hào)輸入時(shí)最少拍無(wú)紋波的設(shè)計(jì)
1.求出系統(tǒng)廣義脈沖傳遞函數(shù)為:

2.根據(jù)上式可知:G(z)存在零點(diǎn)z=-0.36,極點(diǎn)P1=0.367,P2=0.135
所以閉環(huán)脈沖函數(shù)?(z)應(yīng)包含G(Z)的全部零點(diǎn),所以由此可得:

因?yàn)?e(z)是根據(jù)G(z)的不穩(wěn)定性以及?(z)的階次來(lái)決定的,所以:

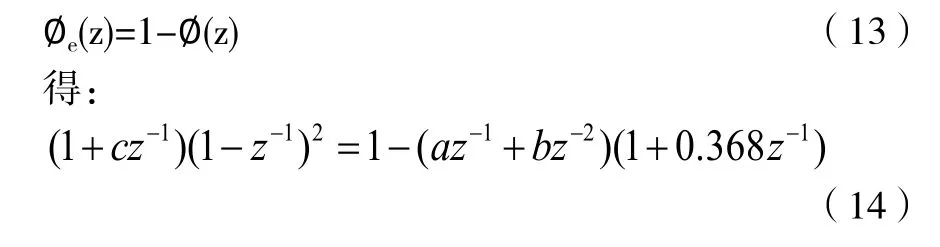
將公式(6)、(7)中?(z)和?e(z)的值代入?e(z)=1-?(z)中可得:

所以聯(lián)立解得:b=0.269 a=0.731
3.求出系統(tǒng)控制器D(z)的傳遞函數(shù)為:
化簡(jiǎn)可得:

4.根據(jù)以上得出的數(shù)據(jù)結(jié)果進(jìn)行仿真。
仿真原理圖如圖2 所示。
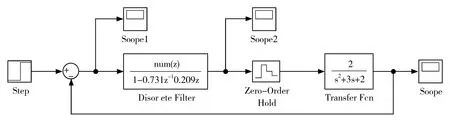
圖2 單位階躍輸入最少拍無(wú)紋波控制系統(tǒng)仿真圖
仿真結(jié)果如圖3、圖4、圖5 所示。
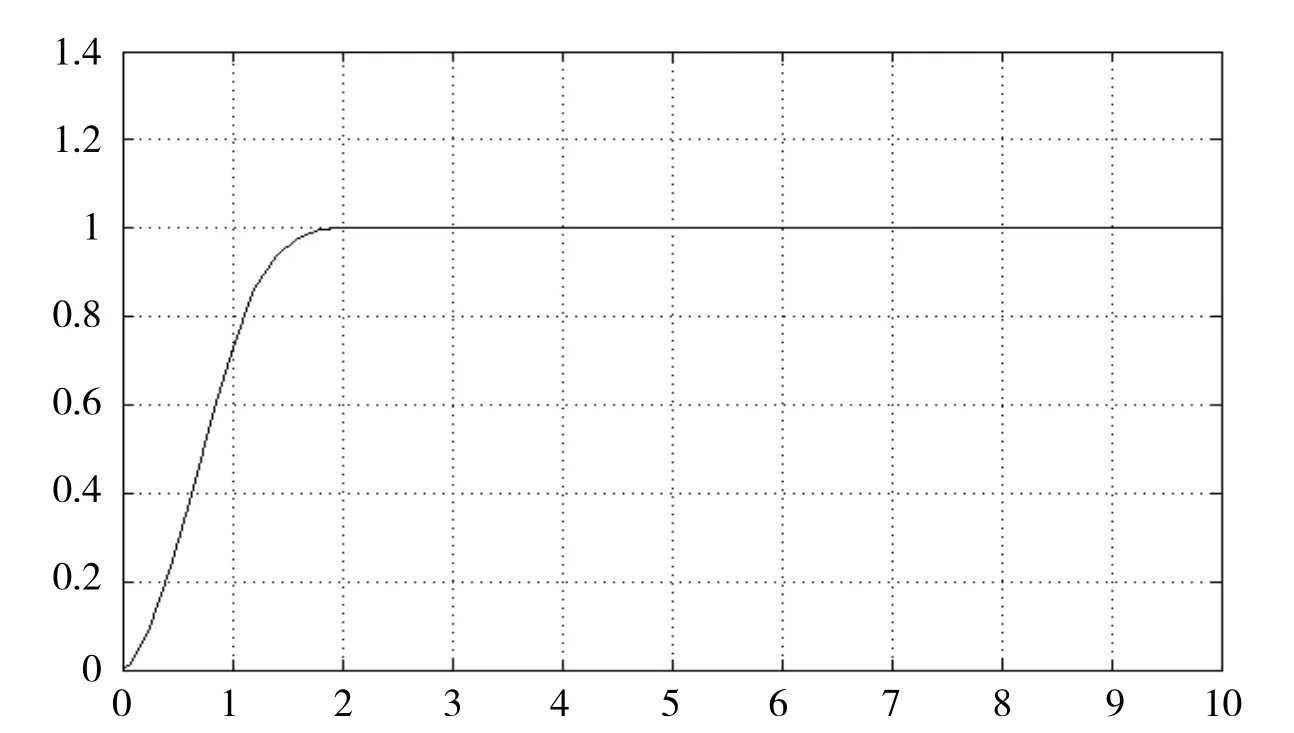
圖3 單位階躍輸入最少拍無(wú)紋波系統(tǒng)輸出
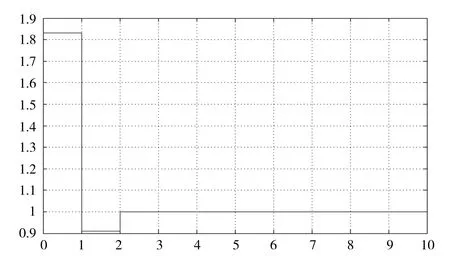
圖4 階躍輸入最少拍無(wú)紋波系統(tǒng)控制器輸出圖
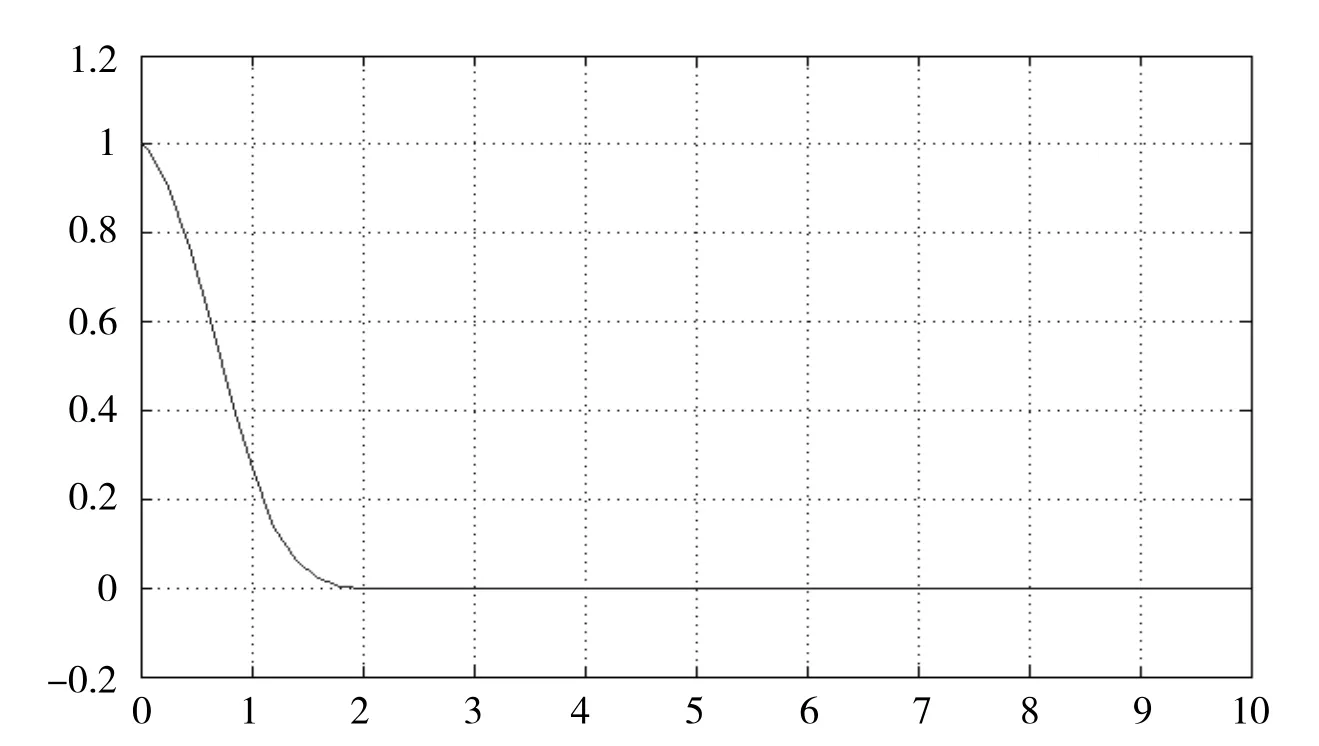
圖5 階躍輸入最少拍無(wú)紋波誤差輸出圖形
根據(jù)以上仿真圖形結(jié)果:系統(tǒng)控制結(jié)果較為穩(wěn)定,系統(tǒng)可以輸出無(wú)紋波,通過(guò)結(jié)果對(duì)比發(fā)現(xiàn),無(wú)紋波系統(tǒng)的調(diào)節(jié)時(shí)間相對(duì)無(wú)紋波增長(zhǎng)若干拍,增長(zhǎng)的拍數(shù)在結(jié)果中查看發(fā)現(xiàn)等于在單位圓內(nèi)的零點(diǎn)數(shù)。
2.2 單位速度信號(hào)輸入時(shí)最少拍無(wú)紋波設(shè)計(jì)
1.求出該系統(tǒng)的廣義脈沖傳遞函數(shù)為:

2.根據(jù)上式可得:G(z)有零點(diǎn)z=-0.36,以及極點(diǎn)P1=0.367,P2=0.135。
所以閉環(huán)脈沖函數(shù)?(z)應(yīng)當(dāng)包含G(Z)所有的零點(diǎn),由此可知:

因?yàn)?(z)的值是由?(z)的階次和G(z)的不穩(wěn)定極點(diǎn)來(lái)決定的。又根據(jù)公式:
根據(jù)此式可得:c=0.3413,b=-0.9274,a=1.6587。
3.再求得控制器D(z)的傳遞函數(shù)為:
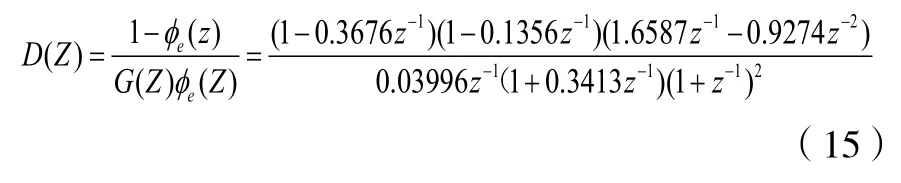
將此式化簡(jiǎn)可得:

4.根據(jù)公式求出的結(jié)果進(jìn)行仿真。
仿真原理圖如圖6 所示。
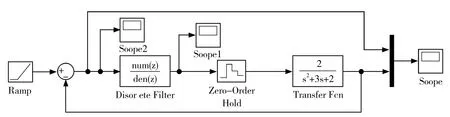
圖6 單位速度輸入無(wú)紋波系統(tǒng)仿真圖
仿真結(jié)果如圖7、圖8、圖9 所示。
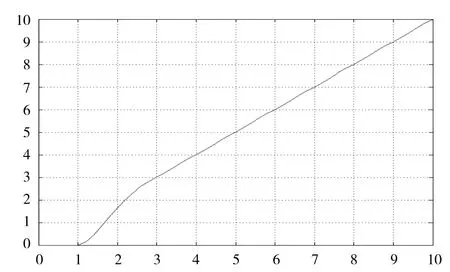
圖7 單位速度輸入無(wú)紋波系統(tǒng)輸出圖形
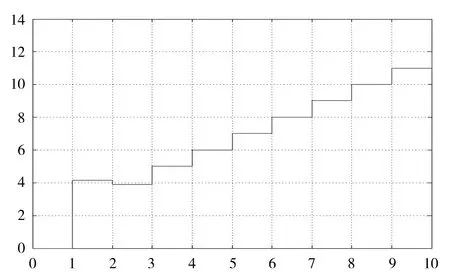
圖8 單位速度輸入無(wú)紋波控制器波形圖形
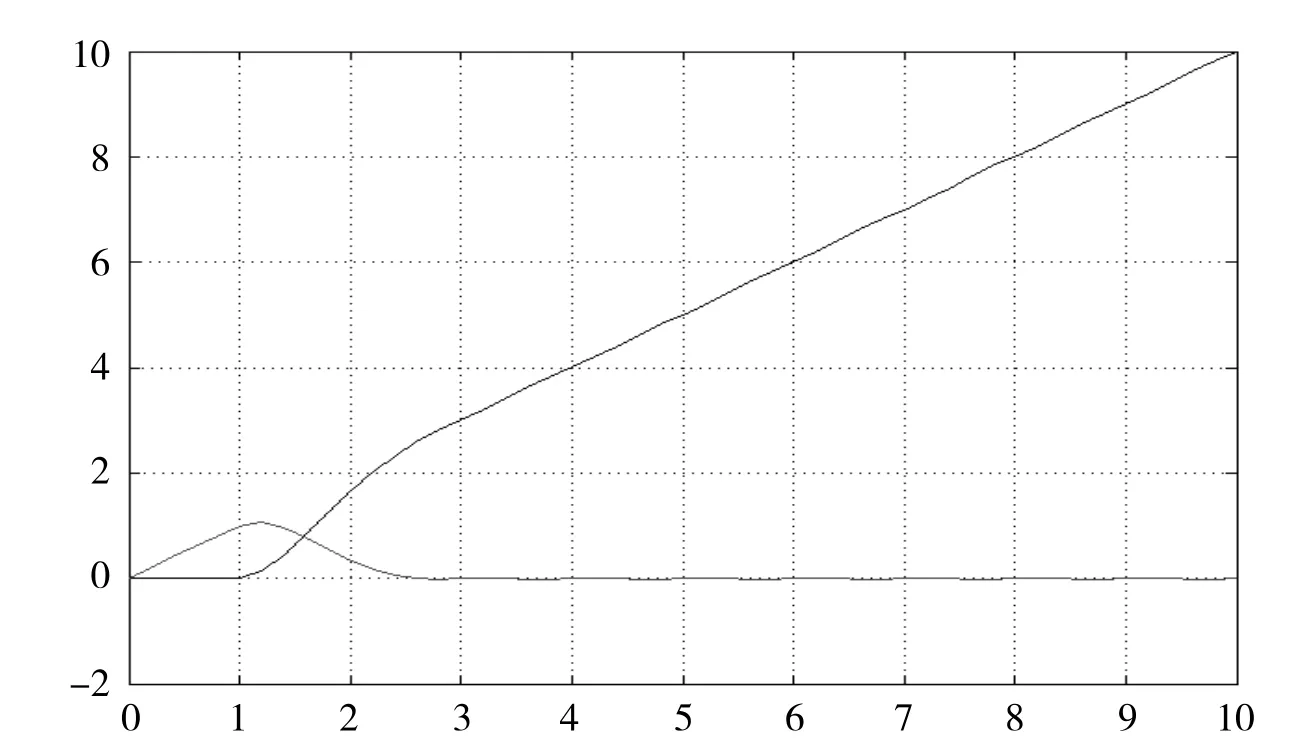
圖9 單位速度輸入無(wú)紋波系統(tǒng)輸出和誤差圖形
根據(jù)以上仿真圖形可知:輸出波在幾拍后便開(kāi)始變成無(wú)紋波。
3 結(jié)語(yǔ)
本文通過(guò)對(duì)最少拍控制系統(tǒng)的設(shè)計(jì),對(duì)計(jì)算機(jī)控制技術(shù)以及自動(dòng)控制原理等相關(guān)知識(shí)有了更加深刻的理解認(rèn)識(shí)。掌握了最少拍無(wú)紋波和最少拍有紋波的區(qū)別、產(chǎn)生紋波的原因、如何消除最少拍中的紋波等一系列問(wèn)題,了解最少拍控制器的設(shè)計(jì)方法過(guò)程,掌握使用Matlab 軟件對(duì)輸入信號(hào)控制的最少拍控制系統(tǒng)進(jìn)行仿真[5],形象具體地觀察到最少拍控制系統(tǒng)的實(shí)驗(yàn)現(xiàn)象。最少拍控制系統(tǒng)本身具有很多優(yōu)點(diǎn),并且在計(jì)算機(jī)控制系統(tǒng)中得到了廣泛應(yīng)用。在實(shí)際運(yùn)用時(shí)則需要根據(jù)對(duì)應(yīng)的情況靈活變通地使用最少拍控制系統(tǒng)設(shè)計(jì)方法。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16